混合动力介绍及Cruise仿真实例详解
【1】AVL-CRUISE软件功能及模块介绍

AVL-CRUISE软件视频教程前言大家好,我是云上,一个使用了AVL CRUISE软件五年的工程师。
从读研究生时候开始接触使用,用他完成了硕士毕业论文的仿真工作,后来加入公司工作继续用到,并参与了李斯特公司组织CRUISE培训,我用了很长的时间去学习研究他。
回想起来,在使用之初,是缺少很多资料作为参考的,所以走了很多弯路,有时候为了解决一个问题会花很长一段时间。
那个时候就觉得如果有一个专门的CRUISE软件视频教程,深入浅出的讲解软件的内容,是一件非常有意义的事情,但是找过了很多资料,这方面的视频资料确实很少的。
后来和李斯特的工程师交流,给他们说了我想做这个视频教程的初衷,他们也非常支持,说后期会给我提供更进一步的培训名额,在此先谢过。
希望我的学习心得以及工作经验能够给大家提供实际的指导和帮助。
时间有限教学视频会不定时的更新,大家可以加入到QQ群422676326进行查看,我的QQ微信同号:596204253。
微信公众号《至云之上》也会发布相应的消息。
视频的内容主要包括基础篇、进阶篇、高阶篇三个主要阶段。
基础篇一、AVL-CRUISE 安装方法二、CRUISE软件的功能及模块的介绍三、整车模型的建立方法四、各个部件的机械连接和信号连接五、动力性经济性能计算任务六、仿真结果后处理分析进阶篇CRUISE与MATLAB联合仿真纯电动车匹配AMT仿真分析混合动力汽车匹配AMT仿真分析混合动力汽车匹配CVT仿真分析AMT换挡控制策略优化高阶篇CRUISE与dSPACE联合仿真测试基础篇一、AVL-CRUISE 安装方法二、CRUISE软件的功能及模块的介绍Hello,大家好,我是云上,欢迎大家观看CRUISE软件教学视频,希望视频的内容对你有所帮助。
上一次课我讲了做这一系列教学视频的初衷以及软件的安装方法,这节课我们主要讲解CRUISE软件的功能,即他能够做什么?哪些研究哪部分人群适用这个软件。
我接触到使用该软件的朋友主要包括两大类,一是高校师生,本科生硕士研究生做毕业论文用,老师做项目需要用到。
增程式电动汽车动力系统参数匹配与仿真分析

关键 词 :电动汽车;动力系统;参 数 ;匹配;仿真 Keywords:Electric Vehicle ;Power System ;Parameter;Matching ;Simulation
中图分类号:TH6:U469.72 文献标志码:A
文章编号=1672-0555(2021 )02-0040 -05
= J 600^(m^ + i n s )
⑷
代 入 相 关 参 数 ,计 算 得 到 增 程 器 输 出 功 率 广 为
22.3 kW。由此可选定发动机的额定功率为45 kW, 发 动 机 的峰值功率为60 kW,发电机的峰值功率为 63 kW0
4 整车仿真分析
4 . 1 整车模型
笔 者 采 用 AVL Cruise软 件 搭 建 增 程 式 电 动 汽 车整车模型。发 动 机 的 最 高 输 出 功 率 为 60 kW,发 动机在各种工况下所需点火控制曲面图如图2 所 示 。由 图 2 可 知 ,发动机转速为2 700 r/miri左右时 具 有 比 较 高 的 燃 油 经 济 性 。发 电 机 扭 矩 转 速 效 率 曲 面图 如 图 3 所示。由 图 3 可 知 ,发电机转速为3 000 r/min时 效 率 可 以 达 到 9 0 % ,由此增程器中发动机 的工作点选取3 000 r/ min。
主减速器传动比为4. 9 ,主 传 动 比 i 为 4. 9 ,代人相关
参 数 ,计 算 得 到 驱 动 电 机 的 最 高 转 速 不 低 于 2 619 r/min,额 定 转 速 \不 低 于 922 r/ min。
装 备 机 械 2021 No.2
— 41 —
计算•分析
Calculation • Analyses
基于CRUISE的某轻型载货汽车动力性优化匹配设计

摘
要
汽车 动 力性 能在 整 车性 能 中 , 占有 非 常 重要 的位 置 , 动 力链 匹配的 优 劣直接
决定 了整 车的动 力性 能 。本 文基 于 C RUI S E软件 , 通过 对 某轻 型载货 汽车 动 力链
进 行 匹配 分析 , 优 化 了动 力链 匹配 , 提 高 了整 车动 力性 能。
0 - 1 0 0 k m / h起 步 加 速 时间 ( 5 6 . 7
S )
5 6 . 2
5 8 . 6
6 0 - 3
5 7 . 9
主 减速 比
5 . 3 7 5
轮 胎规 格
7 . o 0 — 1 6
6 0 — 1 0 0 k m/ h 最高 档 加速 时 间 ( 3 6 . 7
轻 型汽 车技 术
2 0 1 3 ( 9) 总2 8 9
表3 某车型动力性试验结果
车 型代 号 最 高 车速 Y 5
1 08
1 7
1 0 9
1 8
I 】 0
2 4
1 l 0
均值
1 09
整备质量 ( k g )
总质 量 ( k g )
2 5 6 0
对整车的动力性进行计算分析。
3 整车主要技术参数
目标 车型是 某厂 家全新 开发 的新 一代 轻 型载
货汽车产品中的一款 6 t 车型 , 其主要技术参数及
8 技 术纵横
表 1 整 车主 要 技 术参 数
整 车外 形 尺 寸 ( 长 ×宽 X高 )( m m) 5 9 9 5 X2 0 3 0X 2 3 3 0
轻型 汽 车技 术
CRUISE培训课件
评估车辆动力学性能: 制动性能 制动稳定性 稳定性控制
v2009
Cruise Support Team, 12.2010
9
GSP功能简述
GSP向导 基于车辆性能和燃油消耗,利用简单的方法生成换挡
控制策略; 需要的参数较少,适用于初级用户。 GSP生成 为高级用户快速高效的计算GSP map 考虑多驱动模式和路面坡度优化GSP map 生成的GSP输出到TCU用于车辆标定
Cruise Support Team, 12.2010
2
Introduction
概述
Cruise Support Team, 12.2010
3
Introduction 客户需求
优化车辆及车辆部件 (燃油经济 性, 车辆动力性)
分析各种车辆和传动系统结构( AT,AMT, DCT, CVT, GSI, THS)
AVL CRUISE
CRUISE 基础培训教程
李斯特技术中心(上海)有限公司 先进模拟技术部
Content
概述 用户界面 结构与管理 启动CRUISE CRUISE建模流程 项目/方案的使用 管理组件数据 链接 项目数据 – 任务文件夹 计算中心 高级计算 – 参数和零部件匹配,DoE 计算结果浏览与评估 – 结果管理器
零部件供应商 发动机 变速箱 轮胎
大学和咨询公司
Cruise Support Team, 12.2010
11
Introduction 传动系建模 – 实车
Road/Environment
Driver
Speed ASC Clutch
Cruise机理
Cruise运行机制1 Cockpit模型2发动机模型3动力电池模型1.1 Cockpit在Quasi-Stationary计算模式的时候是逆向仿真的,根据车速反算发动机的输出扭矩的,因此实际曲线与目标曲线的差异极小。
2.Cockpit在Simulation计算模式的时候是正向仿真,是一个小步长的跟随系统,是否能够使得实际曲线与目标曲线重合,主要看你的控制策略是否合理,最简单的方法是用目标车速和实际车速做差的PID控制来控制Load Signal。
3.计算是否能准确取决于你的控制策略计算出的Load Signal的值是否准确以及你的Load Signal与Engine Torque之间的对应关系是否准确。
4.CRUISE的Load Signal是线性插值进行计算的,当然你也可以选择其它的插值方法,HEV的Desired Torque是根据你的车速和策略要求来计算的。
5.pid控制的期望速度是驾驶员中的desire velocity from profile,而实际速度是cruise中的车辆中的velocity。
6.换挡:需要调整时间和百分比,时间变长,而比例不变,则每一段代表的比例都会变长,尤其是中间油门踏板和离合器踏板都完全松开的时间过长,这不利于换挡,所以必须调整;7.在CRUISE中,动力源元件都有Start Switch开关量用于控制动力源的工作!你可以用Start Stop模块或自定义控制模块来对其进行操控!8.准静态仿真也叫逆向仿真,即根据轮胎处的扭矩需求反推出发动机应该提供的扭矩,这样可保证实际车速和目标车速保持完全一致。
XX仿真方式也叫正向仿真,即驾驶员根据目标驾驶循环通过离合器踏板,制动踏板和油门踏板来决定发动机扭矩的输出。
考虑了驾驶员的操纵行为对实际车速的影响。
综上所述,若你的导入的标准驾驶员模型并不适合你的车型,则有可能导致发动机工况点偏离正常工作区域。
所以,有时候是需要调整驾驶员模型参数的。
CRUISE_介绍资料_2010
• 变速箱元件库(GearBox Library):包含变速箱,单级齿轮传动机构,差速器,行星齿轮 系,双离合器变速箱(DCT),自动变速器(CVT)等元件,可实现对变速系统的仿真分 析;
GSP Optimization:自动变速箱换挡规律的优化功能,该功能基于 CRUISE 环境中已有的车辆 模型,可以对车辆所有可能运行的工作区域进行分析,考虑档位、油门开度、路面坡度、液力变矩 器的状态等一系列参数;同时考虑经济性和排放性的指标要求,可根据不同的工况特性进行变速箱 换挡特性的优化,其自动生成的 K 因子可以让用户方便的实现经济性和排放性的平衡需求。
GSP Wizard: 基于车辆性能和燃油消耗,利用简单的方法生成换挡控制策略;需要的参数较 少,适用于初级用户。
GSP Generation:自动变速箱换挡规律的生成功能,该功能基于 CRUISE 环境中已有的车辆 模型,可以对车辆所有可能运行的工作区域进行分析,考虑档位、油门开度、路面坡度、液力变矩 器的状态等一系列参数;同时考虑经济性驾驶需求、经济性和动力性驾驶需求、动力性驾驶需求、 强动力性驾驶需求。
典型应用
地址:上海浦东金桥榕桥路 327 号 邮编:201206 TEL:021-58996900 FAX:021-58996822
3
李 斯 特 技 术 中 心 (上 海) 有 限 公 司
LIST Technical Center (Shanghai) Co., LTD
a. 动力总成匹配 基于 CRUISE 的 Components Variation 功能,可以对多发动机,变速箱,主减速器,轮胎等总 成元件进行匹配,根据预先设定的动力,经济和排放性指标在匹配结果上进行合理选型。
基于Simulink的混合动力车型动力经济性仿真模型
项目 整车整备质量,kg
风阻系数 迎风面积,m2 车轮滚动半径,m 发动机转速范围,rpm TM电机最高转速,rpm ISG电机最高转速,rpm 发动机转动惯量,kg·m2 车轮转动惯量,kg·m2 电机及其他齿轮转动惯量,kg·m2 地面附着系数 电池总容量,kWh
电池电压,V 电池内阻,Ω 能量回收车速范围,km/h
考核项目试验载荷整车阻力设定备注参考标准动力性最高车速hev1km最高车速道路kmhcw1875物理参数混合动力车型适用gbt197522005gbt197502005gbt326942016gbt183852005gbt183882005gbt283822012等ev1km最高车速道路kmhcw1875物理参数新能源车型适用发动机巡航最高车速kmhcw1875物理参数hev30min最高车速cw1875物理参数混合动力车型适用ev最大爬坡车速4121kmkmhcw375物理参数新能源车型适用hev最大爬坡车速4121kmkmhcw375物理参数混合动力车型适用加速性能hev0100kmh加速时间scw1875物理参数混合动力车型适用hev0400m加速时间scw1875物理参数混合动力车型适用hev60100kmh加速时间scw1875物理参数混合动力车型适用hev80120kmh加速时间scw1875物理参数混合动力车型适用ev050kmh加速时间scw1875物理参数新能源车型适用ev5080kmh加速时间scw1875物理参数新能源车型适用ev0100kmh加速时间scw1875物理参数新能源车型适用爬坡能力hev最大起步坡度cw375物理参数混合动力车型适用hev最大爬坡度cw375物理参数混合动力车型适用ev最大起步坡度cw375物理参数新能源车型适用ev最大爬坡度cw375物理参数新能源车型适用经济性条件anedc工况百公里能耗cw100滑行法混合动力车型适用gbt197532013gbt197502005gbt183862017等条件bnedc工况百公里能耗cw100滑行法包含发动机的车型适用nedc加权平均油耗l100kmcw100滑行法混合动力车型适用续驶里程ev工况纯电续驶里程kmcw100滑行法新能源车型适用概述行业内采用的动力经济性仿真手段有
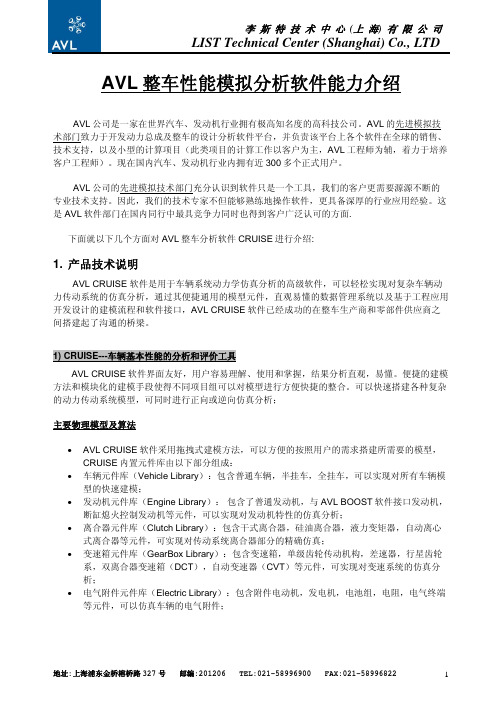
AVL CRUISE基础介绍资料
AVL CRUISECRUISE 基础培训教程李斯特技术中心(上海)有限公司先进模拟技术部杨喜云Content概述用户界面结构与管理启动CRUISECRUISE建模流程项目/方案的使用管理组件数据链接项目数据–任务文件夹计算中心高级计算–参数和零部件匹配,DoE计算结果浏览与评估–结果管理器概述客户需求优化车辆及车辆部件(燃油经济性, 车辆动力性)分析各种车辆和传动系统结构(AT,AMT, DCT, CVT, GSI, THS)评估概念新车(e.g. 混合动力车,燃料电池车,纯电动车)评估传动系统瞬态性能设计车辆热管理系统HiL & RT 仿真分析AVL 解决方案=> AVL CRUISE –车辆性能仿真平台计算和优化燃油消耗、排放和整车性能的综合工具适用于设计仿真任何传动系结构的车辆基于直观的模块化组件的传动系模型真实的再现实车性能与零部件供应商和整车厂家共同发展完善的求解器节省计算时间IntroductionCRUISE–车辆系统的集成●在短时间内可以便捷的改变车辆的结构布置形式●可以快速便捷的将传统车辆改变为混合动力汽车●可以快速实现先进的动力传动概念(AMT, DCT, …)●有大量电气部件,可以用于电动汽车设计开发●便于车辆控制系统的开发和研究●车辆模型的搭建过程简捷易懂●采用模块化建模理念,早期建模阶段所需参数较少●伴随开发过程的不断深入,整个模型会不断完善●提供与ORACLE系统的接口,方便进行数据管理●内置大量的计算任务●动力传动系统的优化设计●传动系统的参数优化●动力总成的匹配优化●动力总成子系统的集成AVL CRUISE软件的适用范围n传统车辆n混合动力及n纯电动汽车n先进动力传动系统研究n2轮及3轮摩托车研究n公交车,卡车及拖挂车研究n特种车辆研究n Introduction应用示例–详细的变速箱评价逐元件建立变速箱模型研究变速箱对燃油经济性和车辆动力性的影响评估TCU控制策略应用示例–RT仿真评估车辆动力学性能:制动性能制动稳定性稳定性控制传动系分析:车辆动力学对燃油经济性和车辆性能的影响换挡品质评价传动系分析同一个模型灵活应用于开发流程的各个阶段简单快捷的更改传动系结构Office/HiL基于测试的实时仿真GSP功能简述●GSP向导⏹基于车辆性能和燃油消耗,利用简单的方法生成换挡控制策略;⏹需要的参数较少,适用于初级用户。
AVL CRUISE 培训
简介及用途
应用领域
传统车辆仿真及传动系分析
应用于发动机及整车开发过程中 标准应用(如,燃油经济性、满负荷加速测试、爬坡性能及
牵引力曲线图)
新型传动方案概念研究
集成化研究方案使并行工程在车辆开发过程中的应用成为可能 包括机械、电器、热管理及控制系统 稳态及瞬态工况 动力传动系刚性及弹性模型
简介及用途
图形用户界面
CRUISE 支持多应用程序界面技术(MAI) 用户所有的工作都是在同一个窗口下完成的,在这个窗口下针 对不同的应用程序有不同的显示界面。
数据总线通道列表在建模器窗口的右下角有两个新增加的按键点击这两个按键可以打开一个列表显示出所有的数据总线上的输入和输出这有助于方便快速的的浏览模型中的数据输入和输出数据输入手动输入数据从已有模型中调入数据从已有数据文件中导入数据拷贝与粘贴方式输入输出数据数据输入循环行驶工况cyclerun爬坡性能分析climbingperformance稳态行驶性能分析constantdrive各挡性能计算runallgears最高车速计算maximumvelocity全负荷加速性能计算fullloadacceleration各挡最大加速度计算maximumaccelerationallgears原地起步连续换档加速性能计算shiftinggearsfromstandstill超车加速性能计算elasticity最大牵引力计算maximumtractionforce巡航行驶工况计算cruising制动滑行反拖性能分析brakethrust计算任务仿真结果仿真结果仿真结果简介及用途车辆模型的搭建crusiematlabsimulink联合应用举例分析联合应用crusiematlabsimulink联合应用crusiematlabsimulink联合应用cruise跟matlab的接口可以让用户将自己设计的逻辑程序集成到cruise里面尤其方便的是可以方便的使用matlabsimulinktm进行建模可以使用以下两种方法
206_基于CRUISE和dSPACE的电动汽车硬件在环仿真_天津大学_夏锌等
基于CRUISE和dSPACE的电动汽车硬件在环仿真夏锌,黄登高,谢辉天津大学内燃机燃烧学国家重点实验室,天津市南开区卫津路92号[摘要] 电动汽车整车控制器(VCU)开发遵循汽车电子传统开发流程V-Cycle,CRUISE软件可以快速搭建对象模型,应用于模型在环(MIL)和硬件在环(HIL)阶段。
本文利用CRUISE 搭建了电动汽车模型,并应用于基于dSPACE的HIL仿真,验证VCU的功能。
关键词:电动汽车;整车控制器;硬件在环主要软件:A VL CRUISE; DSPACE/CONTROLDESK; MATLAB/SIMULINK Hardware-in-the-loop Simulation of Electrical Vehicle Based OnCRUISE and dSPACEXin Xia, Denggao Huang, Hui XieState Key Laboratory of Engine, Weijin Road, 92, Nankai District, Tianjin[Abstract] The development electrical Vehicle Controller Unit(VCU) follows the V-Cycle which is the traditional procedure in the field of automotive electronics. Plant model can be built fast by CRUISE and it can be used in Model-In-the-Loop (MIL) and Hardware-In-the-Loop (HIL). A electrical vehicle model with the help of CRUISE has been built in this paper, and this model has been used in HIL based on dSPACE, furthermore, some functions of VCU have been verified by HIL Simulation.Keywords: Electrical Vehicle; Vehicle Controller Unit; Hardware-in-The-Loop (HIL) Software: AVL CRUISE; DSPACE/CONTROLDESK; MATLAB/SIMULINK1.引言随着能源危机以及环境恶化的加剧,新能源车辆应运而生。