[11 中惯报 33所]一种单轴旋转捷联惯导系统抗晃动快速自对准方法
用于旋转调制捷联惯导系统的旋转控制方法
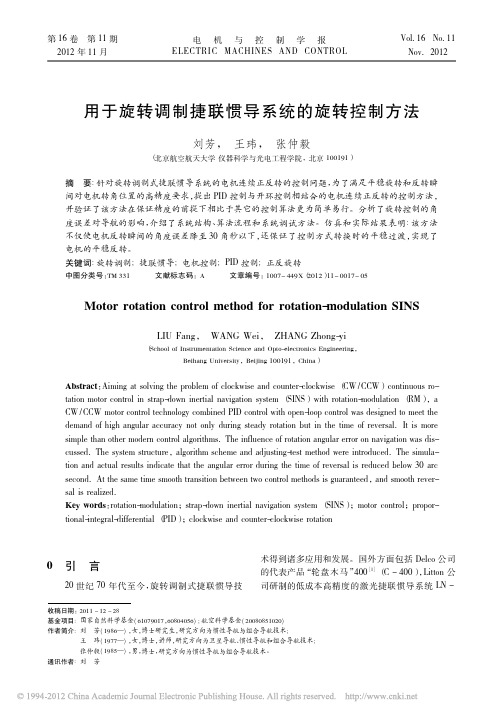
开始
指令转角递增或递减
维持 否 PID 控制
指令转角是否 满足阈值条件 是
切换为开环控制计时器清零
开环控制时间累加
否
开环控制时间
是否大于阈值?
是
设置积分器并 切换为 PID 控制
图 4 算法流程图 Fig. 4 Computation scheme of rotation control
为了保证平稳旋转时的精度并具有足够的抗干 扰性,在电机匀速旋转时采用 PID 控制方式。当指 令转角 θin在正转过程中满足 θin > θ1 或在反转过程 中满足 θin < θ2 ( 其中 θ1 略小于 360°,θ2 略大于 0°) , 即认为电机开始反转,控制方式切换为开环控制方 式,否则继续维持 PID 控制方式。在开环控制方式 中,在电机两端施加几伏到二十几伏的电压,并且当 开环控制计时器的累计时间大于阈值( 一般为 1 ~ 10 ms) 时再切换回 PID 控制,并设置积分器的初值, 电机又开始匀速转动。
针对上述背景,给出了一种相比于其它的控制 算法更为简单易行的,应用于高精度旋转调制捷联 惯导系统的直流电机正反转控制方法,只需具有位 置反馈的单闭环控制回路,采用 PID 控制与开环控 制相结合的控制技术和系统调试方法,在仿真的基 础上对某型采用挠性器件的双轴旋转调制式捷联惯 导系统进行了实际调试,调试结果达到了系统精度 要求。
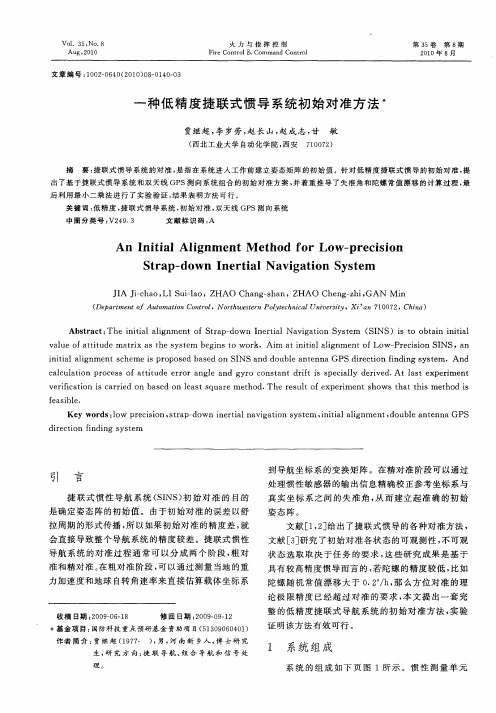
单元体1
单元体 2
图 1 旋转调制捷联惯导系统实物图 Fig. 1 The rotation-modulation strap-down
inertial navigation system
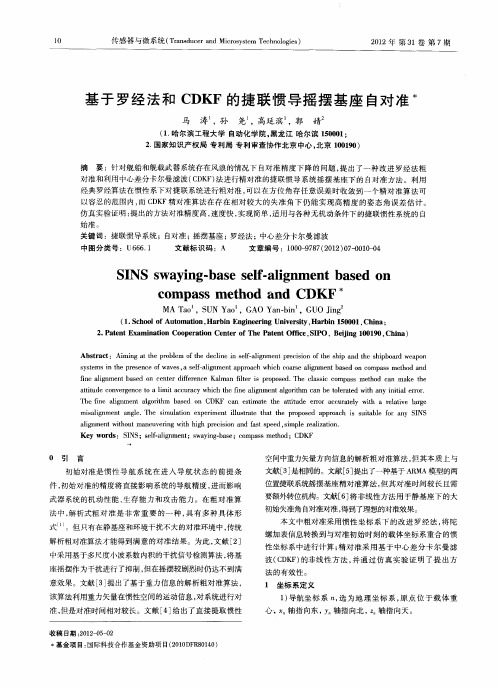
Z
y2
y1
x2
x1
Y
X
图 2 系统结构示意图 Fig. 2 Structure of RM SINS
一种低精度捷联式惯导系统初始对准方法
火 力 与 指 挥 控 制
FieCo to LCo r n r l mma dCo to 8 n nrl
第 3 5卷 第 8 期 21 0 0年 8月 g
文章 编 号 :0 20 4 (0 0 0— 1 00 1 0— 60 2 1 )80 4 —3
后利 用最 小 二 乘 法 进 行 了实 验 验 证 , 果 表 明方 法 可 行 。 结 关 键 词 : 精 度 , 联 式 惯 导 系统 , 始 对 准 , 天 线 GP 低 捷 初 双 S测 向 系 统
中 图分 类 号 : 2 9 3 V 4 . 文献标识码 ; A
A e i i n nt M e o o w- r c s o t
士
到导航 坐标 系 的变换 矩阵 。在 精对 准阶 段可 以通过
百
处理惯 性敏 感器 的输 出信 息精 确校 正参 考坐标 系与 真 实 坐标 系 之 间 的失 准 角 , 而建 立起 准 确 的初 始 从
姿态 阵 。
捷 联 式惯 性 导 航 系 统 ( I ) 始对 准 的 目的 SNS 初
一
种低 精 度 捷联 式 惯导 系统初 始 对 准方 法
贾继超 , 岁劳 , 长 山 , 成 志 , 李 赵 赵 甘
( i 工 业 大 学 自动 化 学 院 , 安 N北 西
敏
70 7 ) 1 0 2
摘 要 : 联 式 惯 导 系 统 的对 准 , 指 在 系 统进 入 工 作 前建 立 姿 态矩 阵 的 初始 值 。针 对 低 精 度 捷 联 式 惯 导 的初 始 对 准 , 捷 是 提 出了 基 于 捷联 式惯 导 系 统 和 双 天 线 G S测 向系 统 组 合 的初 始 对 准 方 案 , 着 重 推 导 了失 准 角 和 陀 螺 常值 漂 移 的 计 算 过 程 , P 并 最
基于罗经法和CDKF的捷联惯导摇摆基座自对准
摘 要 :针对舰船和舰载武器系统存在 风浪 的情况下 自对 准精度下降 的问题 , 出了一 种改进 罗经法粗 提 对准和利用 中心差分卡尔曼滤波( D F 法进行精对准的捷联惯导 系统摇 摆基座下 的 自对 准方法。利用 CK ) 经典罗经算法在惯性 系下对捷联系统进行粗对准 , 以在方位角 存任意误差时 收敛 到一个精对 准算法可 可
2 P t t xmiainC o eainC ne f h ae t fc ,I O, e ig10 9 C ia . ae a n t o prt e tro eP tn i eSP nE o o T Of B in 0 10, hn ) j
A bsr c : Ai n tt r b e o he d ci n s l-lg m e e iin o he s i n h h p o r ta t mi g a he p o lm ft e l ne i efain ntprc so ft h p a d te s i b a d wea on p
马
涛 , : 于罗 经 法 和 C K 等 基 D F的捷 联 惯 导 摇 摆 基 座 自对 准
2 惯性坐标系 n , ) 。 与对准起始 时刻 t 时的 /系重合 的 。 I
惯性 坐标 系 。 3 载 体 坐 标 系 b原 点 位 于 舰 船 重 心 , , z 轴 分 ) Y及 ^
0 引 言
空间中重力矢量方 向信息 的解析粗对准算法 , 但其本质上与 文献[ ] 3 是相同的。文献 [] 5 提出了一种基于 A MA模型的两 R 位置捷联系统摇摆基座精对准算法, 但其对准时间较长且需 要额外转位机构。文献[ ] 6 将非线性方法用于静基 座下 的大
适用于巡检无人机的捷联惯导系统快速对准研究
摘 要: 针对智能巡检无人机微惯性测量组合( MIMU) 的在线对准问题展开研究,旨在通过对鲁棒对准算法的设计 克服系统 / 观测模型误差对对准效能的影响。基于条件极值原理设计了一种适用于 MIMU 在线对准的鲁棒估计算 法,首先对 MIMU 系统动态方程和量测方程中的模型误差进行了量化分析,其次将模型误差引入鲁棒估计算法的设 计过程中,通过等价权值矩阵弥补模型误差对估计结果的不良影响。仿真实验表明,所提算法可以有效提高 MIMU 在线对准的精度和速度,且在出现模型误差时获得比传统鲁棒估计方法更好的对准效能。 关键词: 巡检无人机; 微惯性测量组合; 在线对准; 鲁棒估计; 模型误差 DOI:10.16812/31-1945.2019.04.005
An Efficient Method of Fast and Accurate Alignment of SINS Used on Inspective USV
LIU Weihua1 ,GAO He1,2 ,GAO Chao1*
( 1. Naval Aviation University,Yantai 264001,China; 2. Naval Research Academy,Beijing 100073,China)
智能巡检无人机是重要设施安防巡检的一个新兴 方向; 广泛应用于电力系统的架空输电线路智能巡检、 应急监测、国土 测 绘、环 境 监 测、影 视 航 拍、海 事 任 务、 反恐处变等领域,对上述领域的值班无人化、自动化起 到了重要的作用。对于重要军事设施( 如雷达站、偏远 军事仓库等) 的巡检任务来说,智能巡检无人机可以大 幅度减少人员的值班压力,并提高值班效率。然而,如 何能快速精确完成无人机机载的在线对准是提高武器
系统反应能 力 和 实 现 准 确 打 击 的 关 键 。 但 是,惯 导 系 统的可观测性差,尤其在静基座的情形下其可观测性 最弱[1]。惯性系统的可观测性会影响卡尔曼滤波器进 行状态估计的收敛速度和收敛精度。在对准过程时, 基座的运动可以提高惯导系统的可观测性。因此可在 一定条件下通过基座有目的地机动来提高惯导系统在 线对准的精度和速度[2,3]。
捷联惯导摇摆基座自对准中圆锥误差补偿算法

捷联惯导摇摆基座自对准中圆锥误差补偿算法
王立冬;刘军;鲁军
【期刊名称】《兵工学报》
【年(卷),期】2012(033)007
【摘要】针对捷联惯导系统(SINS)在摇摆基座上的自对准误差,提出了减小圆锥误差、提高自对准精度的具体圆锥误差补偿算法.分析比较了四元数四阶龙格-库塔算法、等效转动矢量的二子样、三子样等圆锥误差补偿算法及其理论补偿效果.结合仿真和实验结果得出:自对准误差随算法子样数的增大而降低,子样数增加1,北向对准误差减小近1倍,姿态角的离散度降低;随摇摆幅度的增大和频率的提高,三子样补偿算法的自对准精度接近稳定;综合考虑采样频率、子样数、计算量和对准精度要求,选择三子样圆锥误差补偿算法可以满足SINS摇摆基座下的自对准要求.【总页数】5页(P826-830)
【作者】王立冬;刘军;鲁军
【作者单位】军械工程学院,河北石家庄050003;军械工程学院,河北石家庄050003;军械工程学院,河北石家庄050003
【正文语种】中文
【中图分类】U666.12
【相关文献】
1.摇摆基座上基于信息的捷联惯导粗对准研究 [J], 秦永元;严恭敏;顾冬晴;郑吉兵
2.基于罗经法和CDKF的捷联惯导摇摆基座自对准 [J], 马涛;孙尧;高延滨;郭婧
3.基于伪地球坐标系的捷联惯导全球动基座初始对准算法 [J], 刘猛;高延滨;李光春;孟庆文;马文霞
4.圆锥误差补偿算法在三轴激光捷联惯导系统中的应用 [J], 刘道静;李立新;郑辛;纪志农
5.基于四元数的捷联惯导惯性系晃动基座自对准算法 [J], 薛海建;郭晓松;张东方;周召发
因版权原因,仅展示原文概要,查看原文内容请购买。
晃动基座下正向-正向回溯初始对准方法

晃动基座下正向-正向回溯初始对准方法徐祥;徐大诚【摘要】针对传统方式需要对准时间长的问题,提出一种晃动基座下正向-正向回溯初始对准方法,实现了快速初始对准的目的.首先,给出了导航惯性系粗对准的基本原理,分析了导航惯性系粗对准在回溯过程中的作用.其次,对捷联惯导系统初始对准过程进行了深入的研究,利用导航惯性系建立精对准系统误差模型,将晃动基座时变姿态误差角估计问题转换为时不变姿态误差角估计问题,进而为正向-正向回溯对准奠定了理论基础.在此基础上,详细分析了正向-正向回溯对准的基本原理和设计方法.最后,通过设计仿真实验,验证了本文设计的对准方法可以在303 s内实现晃动基座上航向误差优于0.1°的对准精度.试验结果表明,本文提出的方法具有计算效率高、对准时间短、对准精度高的优点.【期刊名称】《宇航学报》【年(卷),期】2019(040)008【总页数】7页(P965-971)【关键词】捷联惯性导航系统(SINS);正向-正向回溯对准;导航惯性系误差模型;晃动基座对准【作者】徐祥;徐大诚【作者单位】苏州大学电子信息学院,苏州215100;苏州大学微纳传感技术研究中心,苏州215100;苏州大学电子信息学院,苏州215100;苏州大学微纳传感技术研究中心,苏州215100【正文语种】中文【中图分类】U666.120 引言捷联惯性导航系统具有自主性高、隐蔽性好、数据更新率高等优点,成为舰船、车用、消费类电子等产品定姿、定速、定位的首选系统[1-4]。
捷联惯性导航系统在进入导航定位之前,通常需要进行初始对准过程,以实现初始姿态角的获取。
当前常用的初始对准过程可以分为“粗对准+精对准”模式以及非线性滤波的大方位失准角初始对准模型[5-8]。
文献[9]提出了一种七阶正交容积卡尔曼滤波(Cubature quadrature kalman filter,CQKF)算法,实现了SINS大失准角初始对准。
然而,采用非线性滤波方法进行大失准角条件下的初始对准时,会导致计算量大、滤波不稳定、收敛速度慢等问题,使得其在工程应用中受到限制[10]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第6期
周章华等:一种单轴旋转捷联惯导系统抗晃动快速自对准方法
649
下,我们无法获得有效的基准信息,只能采取自对准 方式。目前自对准常用的方式是利用陀螺和加速度计 的输出及地球自转角速度矢量 ωie 和重力加速度矢量
g ,完成初始姿态矩阵的计算实现水平对准和方位对
在对快速自对准算法进行介绍之前,首先对一些 坐标系及其间变换关系进行说明: 1) 地心地球坐标系 e:原点位于地心, ze 轴沿地 球自转方向, xe 轴位于赤道平面内,从地心指向载体 所在点的子午线, ye 轴与 xe 轴、 ze 轴构成右手坐标。 2) 地心惯性坐标系 i:在 t0 时刻( t0 时刻为自对 准 起 始时 刻, 即 粗对 准起 始 时刻 )将 地 球坐 标系
第 19 卷
ˆ b0 (t ) ,相关文献[1-3]对具体的算法 V i (t ) 和 i b0 系速度 V
本文将采用闭环 Kalman 滤波对 i 进行估计,在 进行滤波估计之前,首先要得到 i 的姿态误差方程, 然后构造合适的观测量,列写出系统状态空间模型, 然后进行闭环 Kalman 滤波对 i 进行精确估计,获得
n n
1 所示,下面分别对粗对准和精对准算法进行介绍。
t0 tk 1
tk 2 (t1 )
t2
图1 Fig.1
粗对准和精对准时序关系
Scheduling of coarse alignment and fine alignment
2.1 粗对准算法设计 粗对准从 t0 时刻开始,任务是估算出导航坐标系 和载体坐标系之间的变换矩阵 Cbn , 对准开始后旋转机 构连续往复旋转,设对准地点的纬度为 L ,则姿态矩 阵可由下式确定:
ozb 分别指向载体的前、上、右。
6) 载体惯性坐标系 i b0 : t0 时刻的载体坐标系 b
1
晃动基座下单轴旋转捷联惯导系统自对准原 理及坐标系定义
在晃动基座上,由于载体受到外界或自身因素影
惯性凝固得到。
2
晃动基座下单轴旋转捷联惯导系统快速自对 准算法设计
对准分为粗对准和精对准,对准时序关系如下图
oyn 轴指天, ozn 轴指东。
的重力加速度为参考矢量进行粗对准的设计思路,针 对单轴旋转捷联惯导的旋转调制特点,给出一种可应 用于单轴旋转捷联惯导抗晃动快速自对准方法,有效 地缩短系统对准时间和提高系统对准精度。
4) 导航坐标系 n:地理坐标系为导航坐标系。 5) 载体坐标系 b:原点在载体重心, oxb 、 oyb 、
Fast self-alignment method for single-axial rotation SINS on disturbing base
ZHOU Zhang-hua, QIU Hong-bo, LIAN Tao, XU Hai-gang, PEI Yu-feng
(Beijing Institute of Automatic Control Equipment, Beijing 100074, China) Abstract: To satisfy the requirement for rapid response and high precision of SINS, a fast self-alignment method for single-axial rotation SINS on disturbing base is presented. Based on the single-axial rotation SINS, a coarse alignment method on disturbing base are presented. A closed loop Kalman filter with velocity in inertial frame used as observed quantity is applied to the fine alignment based on the coarse alignment. The self-alignment test result in vehicle using a single-axial rotation laser gyro SINS show that the azimuth alignment accuracy is superior to 1′/cos (RMS) and the level alignment accuracy is superior to 0.2′(RMS) when the whole alignment time is less than 300 s. The self-alignment method is not only simple in arithmetic, but also little in amount of calculation. By using this method, the single-axial rotation SINS can acquire rapid alignment-speed and high accuracy. All this characteristics prove that the method is valuable in engineering application. Key words: single-axial rotation; strapdown inertial navigation system; closed loop Kalman filter; fast self-alignment 惯导系统在对外提供有效导航信息之前,需要完 成对准工作,建立惯导载体坐标系相对某个参考坐标 系的姿态关系。对准时间和对准精度是对准的两项重 要指标,其中对准精度直接影响系统的导航精度,对 准时间是反映系统快速反应能力的重要指标。一般而 言,较高的对准精度往往需要较长的对准时间,如何 解决对准精度和对准快速性的矛盾是惯性技术研究的
e i i
0 i 0 , Cbb0 (t0 ) I , 1
Cbb0 利用陀螺的输出根据旋转矢量实时更新求取。所
n i i 以 Cb 的求取转化为 Cib0 的估算问题,而 Cib0 的求取利
用了粗对准期间两个不同的时刻 tk 1 和 tk 2 的 i 系速度
650
i
中国惯性技术学报
oxe ye ze 在惯性空间中凝固为 i 系。
准。在载体存在晃动情况下,传统的解析粗对准无法 得到满足精对准要求的初始航姿角,对此有学者提出 采用惯性坐标系中的重力加速度为参考矢量,利用陀 螺和加速度计的输出,得到满足精对准要求的姿态矩 阵初始值
[1-3]
。 本文利用上述文献中采用惯性坐标系中
3) 地理坐标系 n:原点在载体重心, oxn 轴指北,
i
(1)
sin L 0 cos L 式中, C cos L 0 sin L , 0 1 0
n e
cos ie (t t0 ) sin ie (t t0 ) C sin ie (t t0 ) cos ie (t t0 ) 0 0
响(如舰船上受风浪,载车上受发动机、人员上下车 和阵风等) , 使得载体上捷联惯导系统测量到的地球自 转角速度 ωie 和重力加速度 g 受到严重的干扰, 干扰角 在这 速率可能比地球自转角速度 ωie 高出数个数量级。 种情况下, 不能直接采用地球自转角速度 ωie 作为参考 信息。而对于重力加速度而言,虽然在晃动基座下加 速度计测量到的重力加速度也受到外界晃动加速度和 杆臂加速度的干扰,但是通过杆臂效应补偿和滤波处 理还是可以从加速度计的输出信息中提取重力加速度 信息,所以地球重力加速度仍可作为初始对准的参考 信息。在静基座下,一般地球重力加速度在地理系中 的投影为 g [0 g 0] , 显然在 g 中不包含地球自转
都有详细的介绍,这里不赘述。与文献中算法不同的 时,为消除矩阵计算的歪斜误差并让姿态矩阵从理论 上满足惯导误差影响机理,本文在求取 C 时采用下 面公式:
[V i ( t k 1 )]T i i T {[V ( t k 1 )] [V ( t k 2 )]} i i i T {[V ( t k 1 )] [V ( t k 2 )] [V ( t k 1 )]}
i C i ( ω b ) C b 的载体角速度, 由于实际陀螺输 b b b ˆ ib ˆ ib 出的角速度 ω 含有陀螺漂移 ε b ,即 ω ωib ε b ,所
DOI:10.13695/ki.12-1222/o3.2011.06.015
第 19 卷第 6 期 2011 年 12 月 文章编号:1005-6734(2011)06-0648-06
中国惯性技术学报 Journal of Chinese Inertial Technology
Vol.19 No.6 Dec. 2011
收稿日期:2011-06-27;修回日期:2011-09-25 基金项目:总装“十二五”预研项目(513090302) 作者简介:周章华(1982—) ,男,工程师,主要从事惯性导航技术研究。E-mail:zzh_coldface@
重要内容。对捷联惯导系统而言,在惯性器件精度确 定的情况下,目前一种常用的提高系统精度的方法是 采用旋转调制技术,该技术通过单轴或者多轴旋转实 现对惯性器件误差的自动补偿,可以明显提高惯导初 始对准可观测性,从而提高了对准精度。此外,对准 方式也同样影响对准时间和精度,对于动平台一般采 用传递对准方式,该方式对准速度较快,但很多情况
1
i ib0
i 的估计值后,利用式(4)求取姿态矩阵 Cbn ,完成
系统自对准。
C iib0
2.2.1 姿态误差方程
i 的微分方程为: 坐标变换矩阵 Cb
ˆ i b0 ( t )]T [V k1 ˆ i b0 ( t )]T [V ˆ i b0 ( t )]}T {[V k1 k2 i i i ˆ b0 ( t )] [V ˆ b0 ( t )] [V ˆ b0 ( t )]}T {[V k1 k2 k1