MIL-STD-188-220C中R-NAD算法的研究与仿真
单晶硅超精密加工的分子动力学仿真研究进展

层、 恒温原子层 和 牛 顿 原 子 层。 边 界 区 的 原 子 被 固 定在各自位置上, 晶格振动被忽略, 以减少边界效应 和保证晶格结构 的 对 称 性; 恒温区的原子需要被标 定, 以保持该区域温度的恒定; 牛顿区的原子服从牛 刀具的原子也被分为三层。 顿第二定律。在图 % 中,
[&] (’) ()*+,-- 势能函数
>
引言
述, 该系统既可 以 是 少 体 系 统, 也 可 以 是 多 体 系 统。 该方法的基本原理是: 建立一个粒子系统, 对所研究 的微观现象进行 仿 真, 系统中各粒子之间的相互作 用根据量子力学来确定。对于符合经典牛顿力学规 律的大量粒子系 统, 通过粒子运动学方程组的数值 求解, 得出粒子在相空间的运动规律和轨迹, 然后按 照统 计 物 理 原 理 得 出 该 系 统 相 应 的 宏 观 物 理 特
图! 微切削的分子动力学模型
用的存储量少得多, 因此被广泛使用。改进的 I’%F’J 算法为
, & ," 6 3 2 & , " 6 27 " 6
超精密加工仿真时, 首先必须确定合理的势能函数。 目前的分子动力学仿真一般采用经验势函数。经验 势函数可分为 ! 体、 " 体和多体势函 数。 ! 体 势 函 数 包括 #$%&’ 势 函 数、 ($%)*#+,’% 势 函 数 和 -’))+%.* 单晶铝和 /$)’& 势函数。 ! 体 势 函 数 适 用 于 单 晶 铜、 锗等金属材料。 " 体和多 体 势 函 数 则 考 虑 了 具 有 共 价键的晶体结构和晶格方向, 适用于硅、 碳及金刚石 等材料。硅原子 之 间 是 以 共 价 键 结 合 在 一 起 的, 在 仿真中应采用 0’%&$11 势函数, 其函数形式为
逆变器双环控制算法仿真研究

逆变器双环控制算法仿真研究王川川,朱长青,顾闯(军械工程学院河北石家庄050003)摘要:经典PID 控制算法在逆变器中获得广泛应用,但控制效果和精度有待改进和提高,针对此问题,研究了双环控制算法在逆变器控制中的应用,给出了双环控制逆变器的结构,设计了电压环和电流环的控制参数。
在MATLAB/Simulink 软件中构建了双环控制逆变器的仿真模型,通过仿真,验证了控制参数选择的可行性,证明逆变器在采用双环控制算法时具有好的输出性能。
关键词:逆变器;双环控制;MATLAB/Simulink ;仿真中图分类号:TM464文献标识码:A文章编号:1674-6236(2011)04-0078-04Research on inverter ’s double loop control algorithm by simulationWANG Chuan -chuan ,ZHU Chang -qing ,GU Chuang(Ordnance Engineering College,Shijiazhuang 050003,China )Abstract:The classical PID control algorithm is extensively used in inverter ,but its control precision should be improved ,Being aimed at this problem ,double loop control algorithm in inverter's control is researched in this paper.The composition of inverter using double loop control algorithm is given ,and the parameters'of voltage and current are designed.Simulation model of inverter by using double loop control algorithm is constructed .By the way of simulation ,the choose of control parameters are tested and verified ,and it's proved that the inverter has good output performances when double loop control algorithm is used.Key words:inverter ;double loop control ;MATLAB/Simulink ;simulation收稿日期:2010-09-30稿件编号:201009115作者简介:王川川(1985—),男,河南濮阳人,博士研究生。
MIL-STD-202F Method 103B_湿度(稳定状态)

MIL-STD-202F 军用标准之摘译电子和电气组件的测试方法方法103 B湿度(稳定状态)1. 目的这个测试的进行是为了鉴定用于部件的材料的特性,因为这些材料会受到吸引和扩散水分和水蒸气的影响。
这是一个加速环境的测试,是通过气温升高将样品持续曝露到一个高的相关湿度来实现的。
环境将一个气压强加于在水分移动和渗透后构成力之测试下的材料中。
吸湿的材料对水分很敏感,在潮湿环境中很快恶化掉。
许多材料吸收水分后会导致膨胀,从而会破坏它们的功能效用和引起它们物力的损耗以及其他重要机械特性的改变。
吸收水分绝缘材料的电气特性可能会遭遇减低。
这种方法在确定绝缘材料吸收水分时很有用处,没有必要欲作为一种模拟的热带测试。
2. 过程条件:样品应放在一个条件温度为400 ±5 ℃的烘干炉里24个小时。
在这个时段的最后要进行所规定的测量。
容器.:应以那样一种方式组构安排容器和附件,即在测试时避免样品上有冷凝点,如有的话,则将样品曝露在循环空气中。
曝露:将样品放在容器里,在90﹪- 95﹪相关湿度和400 ±2 ℃温度的条件下放如下测试条件中所示的时间:测试条件 测试时间长度A ------------------------------ 240 个小时B ------------------------------ 96 个小时C ------------------------------ 504 个小时D ------------------------------ 1,344 个小时在样品曝露期间,当指定时则用100 V 的或如所指定的电压。
所使用电压的及配给的时间长度应如所规定的。
3. 最终测定3.1 在最高湿度曝露期结束而样品仍在容器中时,应进行所规定的测量。
这些测量可能被比作当使用时最初的测量(请看2.1)。
3.2 在烘干期后曝露期或如使用的高湿度下的随后测量一结束,样品应在室温周遭条件下保存不少于1个小时,除非另有规定的也不超过2个小时,在这之后应在室温周遭条件下进行所规定的测量。
mil-std-202 method 210标准
Mil-std-202 Method 210是美国国防部发布的一项针对电子元件的标准测试方法。
该标准主要用于评估电子元件在特定环境条件下的可靠性和稳定性,以确保其符合军事应用的需求。
下面我们将对Mil-std-202 Method 210的主要内容进行介绍。
一、Mil-std-202 Method 210的背景和意义1. 电子元件可靠性的重要性在军事应用领域,电子元件的可靠性是至关重要的。
由于军事环境的复杂和恶劣,电子元件可能会面临高温、低温、湿度、震动等各种挑战。
对电子元件进行可靠性测试是确保其在军事应用中稳定工作的关键步骤。
2. Mil-std-202 Method 210的重要性Mil-std-202 Method 210作为一项具有权威性和广泛适用性的标准测试方法,其制定和实施对于保障军事电子元件的可靠性具有重要意义。
通过严格遵守该标准,可以有效地评估电子元件在特殊环境下的性能,为军事系统的稳定运行提供可靠保障。
二、Mil-std-202 Method 210的主要内容1. 测试对象Mil-std-202 Method 210主要适用于对电子元件(如集成电路、二极管、晶体管等)进行可靠性测试。
2. 测试条件该标准规定了一系列包括温度、湿度、振动等在内的测试条件,以模拟各种特殊环境下的工作情况。
3. 测试项目Mil-std-202 Method 210包括了对电子元件进行加速寿命试验的一系列测试项目,其中主要包括:- 温度循环试验- 湿热循环试验- 振动试验- 冷冻试验- 高温储存试验- 低温储存试验4. 测试方法标准对以上测试项目的具体测试方法进行了详细规定,包括测试条件的设定、测试设备的选型、测试过程的操作要求等。
5. 测试要求标准对每个测试项目的测试要求进行了明确规定,包括测试的持续时间、测试前后的性能评估标准等。
三、Mil-std-202 Method 210的应用范围和意义1. 应用范围Mil-std-202 Method 210广泛适用于各类军事电子元件的可靠性测试,包括军用通信设备、雷达系统、导航系统等各种军事应用的电子设备。
波束形成算法的研究与仿真

2
智能天线又称自适应天线阵列、可变天线阵列、多天线。智能天线指的是带有可以判定信号的空间信息(比如传播方向)和跟踪、定位信号源的智能算法,并且可以根据此信息,进行空域滤波的天线阵列。智能天线采用空分复用(SDMA)方式,利用信号在传播路径方向上的差别,将时延扩散、瑞利衰落、多径、信道干扰的影响降低,将同频率、同时隙信号区别开来,和其他复用技术相结合,最大限度地有效利用频谱资源。早期应用集中于雷达和声呐信号处理领域,20世纪70年代后被引入军事通信中。
6)为高速移动用户提供波束赋形问题:由于用户的移动性,并且无线信道的时变特性,对天线处理算法的效率要求较高,并且为了保证智能天线的正常工作,也希望TDD周期不能太长。所以,如果在该系统内的终端移动速度较快,那么TDD上下行转换周期需要进一步缩短。
7)硬件方面的设备复杂性问题:智能天线的性能会随着天线阵元的数量得增加而增加,但是增加天线数量,会导致系统的复杂度上升,所以硬件方面又限制了天线阵元数量的增长。
10图4均方误差与符号数的关系图4中的仿真参数与图3中相同从图中可以明显的看出三种算法在已知符号数对均方误差的影响本文算法迭代5次得结果明显比lscma算法迭代20次得效果和半盲静态最小二乘恒模算法迭代5次得效果更好本文算法在相同的符号数下均方误差更小进一步验证了本文算法的优势在此图中可以看出随着已知符号数的增加三种算法均方误差相比动态空间法优于静态空间法静态空间法优于动态法
Keywords:Beamforming, smart antenna, blind adaptive algorithm, semi-blind adaptive algorithm.
第一章
20世纪90年代以来,无线通信技术在不断发展。有限的无线资源面临着通信数据大爆炸的困境,而解决这个问题的一条主要途径就是开发智能天线。智能天线是近年来移动通信领域中的一个研究热点,是解决频率资源匮乏的有效途径,同时还可以提高系统容量和通信质量[1]。
半导体器件两种结壳热阻测试方法对比研究
半导体器件两种结壳热阻测试方法对比研究发表时间:2018-10-17T09:48:28.250Z 来源:《基层建设》2018年第27期 作者: 李飞 安海华[导读] 摘要:对国际上公认的两种半导体器件结壳热阻测试方法美军标MIL-STD-750F和JEDEC标准进行对比测试研究。
西安卫光科技有限公司 陕西西安 710065
摘要:对国际上公认的两种半导体器件结壳热阻测试方法美军标MIL-STD-750F和JEDEC标准进行对比测试研究。通过双极性晶体管和MOSFET两种不同类型的器件,用Phase 12进行实测,得到了不同方法下的热阻值与曲线。分析了两种测试方法原理及测试结果的差异,科研生产提供参考。
关键词:一维传热;NMOSFET;结壳热阻Rthj-c;K系数;温度敏感参数TSP
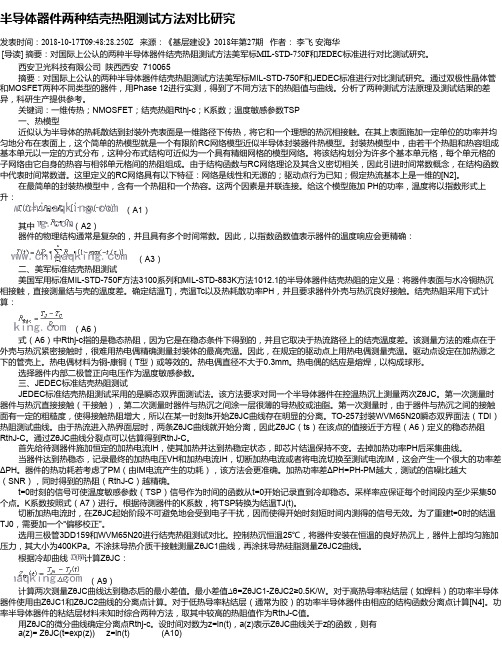
一、热模型
近似认为半导体的热耗散结到封装外壳表面是一维路径下传热,将它和一个理想的热沉相接触。在其上表面施加一定单位的功率并均匀地分布在表面上,这个简单的热模型就是一个有限阶RC网络模型近似半导体封装器件热模型。封装热模型中,由若干个热阻和热容组成基本单元以一定的方式分布,这种分布式结构可近似为一个具有精细网格的模型网络。将该结构划分为许多个基本单元格,每个单元格的子网络由它自身的热容与相邻单元格间的热阻组成。由于结构函数与RC网络理论及其含义密切相关,因此引进时间常数概念,在结构函数中代表时间常数谱。这里定义的RC网络具有以下特征:网络是线性和无源的;驱动点行为已知;假定热流基本上是一维的[N2]。
在最简单的封装热模型中,含有一个热阻和一个热容。这两个因素是并联连接。给这个模型施加 PH的功率,温度将以指数形式上升:
(A1)
其中 (A2)
器件的物理结构通常是复杂的,并且具有多个时间常数。因此,以指数函数值表示器件的温度响应会更精确:
(A3)
二、美军标准结壳热阻测试
美国军用标准MIL-STD-750F方法3100系列和MIL-STD-883K方法1012.1的半导体器件结壳热阻的定义是:将器件表面与水冷铜热沉相接触,直接测量结与壳的温度差。确定结温Tj,壳温Tc以及热耗散功率PH,并且要求器件外壳与热沉良好接触。结壳热阻采用下式计算:
基于Simufact的自冲铆接试验与仿真平台设计
接的板材'铆钉和凹 模 等 零 部 件 在 各 种 工 艺 条 件 下
进 行 计 算 机 模 拟 分 析 力1行 程 曲 线 和 失 效 形 式 等( 有 限 元 建 模 一 般 主 要 有 0 步 %模 型 建 立 '边 界 条 件 的 确定'有 限 元 计 算 流 程 分 析 和 模 拟 计 算 结 果 ( )!* !""4年!万淑敏 提 )0* 出 了 03 钢 表 面 热 处 理 和 $"$0 铝的本构方程(同年!岁 波)/*建 立 了 弹 塑 性 的 %8= 有限元模 型(!"## 年!严 柯 科 等 对 )3* 两 层 3"3! 铝 的单搭模型建立了 VS1AJB*的 二 维 仿 真!得 到 了 应 力1应变 云 图 和 时 间1载 荷 曲 线(!"#3 年!刘 福 龙
新 技 术 新 工 艺 设 计 与 计 算
设计
等 对 )$* 3"3!铝和 %8HH 钢 的 异 种 金 属 铆 接 建 立 了 VS1AJB*三 维 模 型!将 拉 伸 曲 线 简 化 为 双 限 行 力 学 模 型!测 试 了 自 冲 铆 连 接 材 料 的 工 程 应 力1应 变 特 性(
图/.'' 铆钉实测几何参数
表 ! K. 铆 钉 几 何 参 数 与 力 学 性 能 参 数 表
弹性模量&?8* 屈服强度&K8* 抗拉强度&K8* 延伸率&<
#55
..3
##."
#"
新 技 术 新 工 艺 设 计 与 计 算
新 技 术 新 工 艺 !"!# 年 第 $ 期
坠撞环境下的乘员动态响应仿真
第41卷第4期2009年8月 南 京 航 空 航 天 大 学 学 报Jou rnal of N an jing U n iversity of A eronau tics &A stronau ticsV o l .41N o.4 A ug .2009坠撞环境下的乘员动态响应仿真何 欢1,2 何 成1,2 陈国平1,2(1.南京航空航天大学飞行器结构力学与控制教育部重点实验室,南京,210016;2.南京航空航天大学振动工程研究所,南京,210016)摘要:研究了全机坠撞环境下的乘员动态响应模拟技术,根据分析结果评价和辅助现有机型的抗坠毁设计,发现对抗坠毁设计不利的因素。
文章首先建立了用于全机坠撞分析的H ybrid III 型标准假人模型;其次,结合多刚体动力学和瞬态非线性有限元分析技术,从仿真分析角度研究了轻型飞机在纵向坠撞条件下的结构耐撞性和乘员动态响应过程。
假人动态响应的分析结果表明:在飞机纵向坠撞过程中,乘员有可能受到严重头部和腿部伤害。
根据分析结果找出了不利于乘员保护的因素,提出了座椅约束系统的设计改进方案。
最后通过分析手段检验了设计修改的可靠性。
关键词:飞机设计;耐撞性;多刚体动力学;假人中图分类号:V 221 文献标识码:A 文章编号:100522615(2009)0420486205 收稿日期:2008209204;修订日期:2009204221 作者简介:何欢,男,博士,讲师,1978年2月生,E 2m ail :hehuan @nuaa .edu .cn 。
Occupan t Si m ula tion under Cra sh Scenar iosH e H uan1,2,H e Cheng 1,2,Chen Guop ing 1,2(1.M oE Key L ab of Structure M echanics and Contro l fo r A ircraft ,N anjing U niversity ofA eronautics &A stronautics ,N anjing ,210016,Ch ina ;2.Institute of V ibrati on Engineering R esearch ,N anjing U niversity of A eronautics &A stronautics ,N anjing ,210016,Ch ina )Abstract :T he occupan t si m u lati on under crash scenari o s is m ade and the analytical resu lts are u sed to evaluate and assist the crashw o rth iness design of the aircraft .D isadvan tageou s featu res of aircraft crashw o rth iness are founded based on the analytical resu lts .A m odel of hyb rid III dumm y fo r the crash si m u lati on is develop ed .T he m u lti 2rigid body dynam ics is com b ined w ith the tran sien t non linear fin ite elem en t m ethod to evaluate the crashw o rth iness of the aircraft and si m u late respon ses of the occupan t .A nalytical resu lts show that the head and the legs of the occup an t suffer seri ou sly in ju res w hen the aircraft is under a longitudinal crash scenari o s .T he crashw o rth iness of the ligh t aircraft is evaluated by analytical m ethods and the unfavou rab le facto rs of the aircraft are ob tained .M odificati on s fo r the seat restrain t system are p ropo sed to i m p rove the p ro tecti on of the seat system fo r the occupan ts .T he validati on of the m odificati on is dem on strated by analytical resu lts .Key words :aircraft design ;crashw o rth iness ;m u lti 2rigid body dynam ics ;dumm y 在可生存坠撞条件下是否具有保护乘员生命安全的能力是飞机结构的抗坠毁性能的一项重要指标。
通用脉冲雷达信号仿真软件设计与实现
收稿日期:2020-01-05修回日期:2020-02-20基金项目:国家自然科学基金资助项目(11747089)作者简介:张华杰(1983-),女,河南新乡人,硕士。
研究方向:电子信息工程。
*摘要:基于雷达信号的基本理论,分析整理了雷达信号的时域表示、频域表示以及模糊函数;归纳总结了单载频矩形脉冲信号、线性调频矩形脉冲信号以及伪随机二相编码信号等3种典型的雷达脉冲信号,对它们的复包络、时域描述、频谱函数、模糊函数及其特点进行了详尽研究和分析,建立了3种雷达脉冲信号的完整的数学模型;基于Matlab 仿真软件对3种典型的雷达脉冲信号进行了仿真实现,设计并编写了通用脉冲雷达信号仿真软件。
该仿真软件能够对雷达脉冲信号的各种参数、信号采样频率和采样时间进行设置,软件按照设置的参数进行信号仿真,并能给出信号的时域波形、频谱及其三维模糊函数图,这对于雷达信号形式的教学和科研具有积极的推动作用,学员能够直观形象地学习和理解各种雷达脉冲信号,同时对于相关的科研工作,能够提供所需的各种雷达信号数据,为雷达信号处理相关算法研究提供数据支撑。
关键词:雷达脉冲信号,线性调频信号,二相编码信号,信号仿真,模糊函数中图分类号:TN29文献标识码:ADOI :10.3969/j.issn.1002-0640.2021.02.017引用格式:张华杰.通用脉冲雷达信号仿真软件设计与实现[J ].火力与指挥控制,2021,46(2):97-103.通用脉冲雷达信号仿真软件设计与实现*张华杰(新乡学院物理与电子工程学院,河南新乡453000)Design and Implementation of General Pulse Radar Signal Simulation SoftwareZHANG Hua-jie(School of Physics and Electronic Engineering ,Xinxiang University ,Xinxiang 453000,China )Abstract :Firstly ,based on the basic theory of radar signal ,the time domain representation ,frequency domain representation and fuzzy function of radar signal are analyzed and arranged ;three typical radar pulse signals ,including single carrier rectangular pulse signal ,LFM rectangular pulse signal and pseudo -random two -phase coded signal are summarized ,and describes their complex envelope ,time domain description ,spectrum function ,fuzzy function and their deatures are elaborated and analyzed in details ,and the complete mathematical models of three kinds of radar pulse signals are established.Finally ,based on the MATLAB simulation software ,three kinds of typical radar pulse signals are simulated ,and the general pulse radar signal simulation software is designed and compiled.The simulation software can set various parameters ,signal sampling frequency and sampling time of radar pulse signals ,and simulate the signals according to the set parameters ,and provide the time -domain waveform ,spectrum and three-dimensional fuzzy function diagram of the signals ,which has a positive role in promoting the teaching and scientific research of radar signal form ,and students can intuitively and vividly learn and understand all kinds radar pulse singnals.At the same time ,for the related research work ,it can provide all kinds of needed radar signal data ,and provide data support for the relative algorithm research of radar signal processing algorithm.Key words :radar pulse signal ,LFM signal ,biphase coded signal ,signal simulation ,fuzzy function Citation format :ZHANG H J.Design and implementation of general pulse radar signal simulation software [J ].Fire Control &Command Control ,2021,46(2):97-103.文章编号:1002-0640(2021)02-0097-07Vol.46,No.2Feb ,2021火力与指挥控制Fire Control &Command Control 第46卷第2期2021年2月97··(总第46-)火力与指挥控制2021年第2期0引言雷达系统在军事和民用领域都有着很广泛的影响,长期以来我国的雷达制造水平有了长足的发展,但在系统的仿真领域起步较晚,而且缺乏统一的规划。
【精品完整版】基于机载雷达的数据处理算法仿真研究
摘要(此文档为word格式,下载后您可任意编辑修改!)摘要现代战争中,空中力量的重要性不言而喻。
作为影响战机作战效率的重要因素,机载雷达的作用显得尤为重要。
相对于其他固定平台,由于雷达平台和目标之间存在相对运动,再加上载机本身一些因素的影响,数据的处理要困难许多。
本文以某机载雷达仿真软件项目为背景,对机载雷达数据处理做了部分研究。
首先,针对机载雷达观测和处理的数据要在不同的坐标系下分别进行的问题,详细的分析了从载机天线阵面坐标系转到空间大地直角坐标系的流程,并对不同坐标系下协方差的转换进行了仿真分析。
其次,从工程角度出发,研究分析了几种典型的航迹起始方法,包括直观法、逻辑法和Hough变换法。
由于基于批处理的Hough变换法计算量太大不利于工程上实现,本文重点研究了利用速度、加速度及角度进行限定的直观法和基于滑窗的逻辑法。
再次,对于数据关联中适合于单目标环境下的PDAF算法和适合于多目标环境下的JPDA算法进行了仿真,并对几种代表性的机动目标跟踪算法,特别是IMM算法进行了详细的仿真分析。
最后,针对前面的工作,将椭球门和速度、加速度及角度限定结合在一起,结合IMM_PDAF算法,做了仿真分析,结果表明在一定条件下可以有效地减少落入波门内的杂波数目,提高关联和跟踪的质量。
关键词:数据处理、坐标转换、航迹起始、数据关联、机动目标跟踪IABSTRACTABSTRACTIt goes without saying that the importance of air power in modern warfare. As an important factor to affect the efficiency of warplanes, the role of airborne radar becomes vital important. Due to the relative motions between airborne platform and the targets, and the influence of the plane itself, the data processing is more difficult in relation to other fixed platform. Based on an airborne radar simulation software project, this paper does some research on airborne radar data processing.First, in term of the question of the observation and processing of the airborne radar’s data in a different coordinate system, with a detailed analysis of the process from the antenna array coordinate system to the earth right angle system, and simulate the transformation of covariance in different coordinate.Second, from the angle of engineering, do some research on several typical track initiation methods, including direct-vision method, logic method and Hough transfer method. Due to the operations of the Hough transfer method based on processing batch is too much to achieve in project, this paper emphatically researches the direct-vision method with the limit of speed, acceleration and angle, and the logic method based on sliding-windows.Third, do some research on the data association, for example, the PDAF algorithm which is suitable for single goal environment and the JPDA algorithm which is suitable for multi-objective environment, and simulate several representative maneuvering target tracking algorithm, in particular the IMM algorithm.Finally, in term of previous work, combined the elliptical goal with limited speed, acceleration and angle, combined with IMM_PDAF algorithm, the simulate results show that this method can effectively reduce the number of clutters of the gate under some conditions, which improve the quality of association and tracking.Key Words:Data processing, Coordinate Transfer, Tracking Initialization, Data Association, Maneuvering Target TrackingII目录第一章绪论 (1)1.1 机载雷达发展史 (1)1.2 雷达数据处理简介 (2)1.2.1 滤波理论简介 (2)1.2.2 雷达数据处理技术的历史和现状 (4)1.3 课题背景 (5)1.4 论文安排 (6)第二章坐标系转换及误差转换分析 (7)2.1 相关坐标系及其定义 (7)2.1.1 天线阵面极坐标系 (7)2.1.2 天线阵面直角坐标系 (8)2.1.3 载机直角坐标系 (8)2.1.4 载机地理直角坐标系 (9)2.1.5 空间大地直角坐标系 (9)2.2 坐标转换 (9)2.2.1 天线阵面极坐标系转天线阵面直角坐标系 (10)2.2.2 天线阵面直角坐标系转载机直角坐标系 (10)2.2.3 载机直角坐标系转载机地理直角坐标系 (10)2.2.4 载机地理直角坐标系转空间大地直角坐标系 (11)2.3 误差转换分析 (12)2.3.1 原理分析 (12)2.3.2 仿真分析 (14)2.4 本章小结 (15)第三章波门及航迹起始方法研究 (16)III3.1 相关波门简介 (16)3.1.1 椭球波门 (17)3.1.2 矩形波门 (18)3.1.3 扇形波门 (18)3.2 航迹起始方法 (19)3.2.1 直观法 (19)3.2.2 逻辑法 (20)3.2.3 修正的逻辑法 (21)3.2.4 Hough变换法 (21)3.3 仿真分析 (23)3.4 本章小结 (25)第四章数据关联 (27)4.1 最近邻域法 (28)4.2 概率数据互联算法 (28)4.2.1 状态更新与协方差更新 (29)4.2.2 互联概率计算 (31)4.3 联合概率数据互联算法 (32)4.3.1 联合事件的生成 (32)4.3.2 互联概率的计算 (33)4.3.3 状态估计协方差的计算 (34)4.4 仿真分析 (35)4.4.1 概率数据互联算法 (35)4.4.2 联合概率数据关联算法 (37)4.5 本章小结 (40)第五章机动目标跟踪 (41)5.1 可调白噪声模型算法 (41)5.2 变维滤波算法 (42)5.3 Singer模型算法 (43)IV5.3.1 算法简介 (43)5.3.2 仿真分析 (44)5.4 交互式多模型算法 (45)5.4.1 交互式多模型算法步骤 (46)5.4.2 仿真分析 (47)5.5 本章小结 (50)第六章基于交互式多模型概率数据关联算法的多重门限研究 (52)6.1 改进的IMM_PDA算法 (52)6.2 椭球跟踪门 (53)6.3 速度限定 (53)6.4 角度限定 (54)6.5 仿真研究 (54)第七章全文总结 (57)参考文献 (58)致谢 (61)发表论文 (62)V图目录图1-1雷达数据处理系统流程图 (2)图2-1天线阵面坐标系参考模型 (7)图2-2载机直角坐标系参考模型 (8)图2-3地球椭圆坐标系参考模型 (9)图2-4机载雷达坐标转换过程示意图 (9)图3-1椭圆和矩形波门示意图 (17)图3-2扇形波门示意图 (18)图3-3滑窗法示意图 (20)图3-4笛卡尔坐标系中的一条直线 (22)图3-6仿真场景示意图 (23)图3-7直观法(速度和加速度限定) (24)图3-8直观法(速度、加速度和角度限定) (24)图3-9逻辑法 (24)图3-10修正的逻辑法 (24)图3-11 Hough变换法 (25)图4-1概率数据互联算法单次仿真循环流程图 (31)图4-2联合概率数据互联算法单次仿真循环流程图 (35)图4-3 PDA算法(匀速运动) (36)图4-4 PDA(匀速运动)误差分析 (36)图4-5 PDA算法(匀加速运动) (36)图4-6 PDA(匀加速运动)误差分析 (36)图4-7目标真实场景图 (38)图4-8 JPDA算法关联图 (38)图4-9目标1误差图 (38)图4-10目标2误差图 (38)图4-11目标3误差图 (38)图5-1滤波跟踪图 (45)图5-2量测和滤波误差图 (45)VI图5-3交互式多模型算法原理图 (45)图5-4真实轨迹 (49)图5-5量测轨迹 (49)图5-6滤波轨迹 (49)图5-7 X方向标准差 (49)图5-8 X方向误差 (49)图5-9 Y方向标准差 (50)图5-10 Y方向误差 (50)图5-11 Z方向标准差 (50)图5-12 Z方向误差 (50)图6-1改进的IMM_PDA算法结构图 (52)图6-2速度和角度限定示意图 (53)图6-3密集环境关联跟踪图 (55)图6-4稀疏环境关联跟踪图 (55)VII表目录表2-1 两种方法各方向的标准差 (14)表2-2 两种方法各方向的标准差 (14)表6-1 不同场景落入三种波门内的回波数目 (55)VIII缩略语对照表 IX 缩略语对照表PDAFProbabilistic Data Association Filter 概率数据关联滤波 PDAProbabilistic Data Association 概率数据互联 JPDAJoint Probabilistic Data Association 联合概率数据互联 IMMInteracting Multiple Model 交互式多模型 IMMPDAFInteracting Multiple Model Probabilistic Data Association Filter 交互式多模型概率数据关联滤波 MPWGModel Probability Weighed Gating 模型概率加权跟踪门第一章绪论第一章绪论1.1机载雷达发展史1935年,针对于海上货轮经常受到德国潜艇袭击的问题,英国科学家成功地将雷达和飞机结合起来,实现了对海域的监视,就此世界上第一部机载雷达诞生。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
强设计与实现 M_L—ST D一1 88—2 2 0 C中 R—N A D算法的研究与仿真
邱宏燕 张剑 中国电子科技集团公司第七研究所 【摘要】MiL—STD一188—220C协议MAC层提供了5种网络接入延迟算法,文章对其中的随机网络接入延迟(R-NAD) 算法进行了研究、建模仿真,找到了影响网络性能的关键参数,提出了基于自适应竞争窗口的R—NAD。仿真试验结果 表明,该算法提高了网络吞吐量,减,J、了端到端延迟。 【关键词】220C协议 R-NAD 自适应竞争窗口 NBDT RHDo
1 刖吾 220C协议是美国国防部指定的关于数字信息传输设 备子系统CNR(战斗网无线电台)的通用标准”】。220C 协议是军队数字化的重要指导性文件,以220C为基础, 自主开发战术互联网关键技术与设备,是军队数字化部 队和数字化战场建设迫切需要解决的问题。研究220C协 议中的MAC,对在野战无线条件下提高数据传输速率和 信道利用率以及端到端延迟具有非常重要的军事意义和 现实意义。 220C协议包含了控制节点访问信道的一系列规则。 根据网络接入定时模型,网络接入过程包括网络繁忙 侦听(NBDT)、响应保持延迟(RHD。)、超时定时 器(TP)和网络接入延迟(NAD)4个基本的接入子功 能。为了提高网络的性能和满足多种服务要求,220C协 议在网络接入延迟子功能的实现上定义了5种网络接入
收稿日期:2010-05—05 责任编辑:吴竹立wuzhuli@mbcom.ca:::●
控制算法,有效地解决了无线分组网络MAC层的技术难 题。
2 R—NAD算法研究和仿真建模 2 …}、{A 毒 法 220C网络接入控制协议中的NAD有5种计算方式 ]: R—NAD(随机网络接入延迟)、P—NAD(优先网络接 入延迟)、H—NAD(混合网络接入延迟)、RE—NAD (电台嵌入式网络接入延迟)、DAP—NAD(确定自适应 优先一网络接入延迟)。其中R—NAD接入算法最简单, 可保证每个站都有同等的机会接入网络。其随机特性也 提供了对接入碰撞的解决办法。网络中每一次接入都可 以使用与上次接入延迟不同的值。R—NAD中网络接入延 迟的计算公式为: 1 NAD=Ranaom(aw)×aSlotTime (1】
其中W=t7 ,17是网络中的站点数, 取值的基 本做法是初始值为1,每次重传增加一倍。
20 0 痞 I 77 1年第14期 ,, NAD只是考虑到当前网络中站点数,当网络繁忙 时,就加倍增加竞争窗口,没有考虑实际网络中当前某 个传输所需要的时间。 (1】自适应竞争窗IZI 假如无线网络中有,7个固定的竞争节点,且老是有信 息包传输。对于某一固定竞争窗13 W,假定二进制中的 退避值 (,)的初始值在(0, 之间随机选择,且在每一个 空闲时隙会减小1。对于随机过程6(,)可以通过下面的离 散马尔可夫链来建立它的模型 : P{b(t+1)=k} =P{6(f)= +1))+ ,Jj}< 一l(2) 尸{6o+1): 一l}= , = 一1(3) 通过上面两个式子以及随机过程的分析得到 6(,)=膏}的稳定概率为: l…imP{b(f)="=p = 2(W -k) r—}∞ W● _l 这样得到在一个时隙里一个节点传输的概率为 p。 —W—+I,那么网络中厂7个节点在一个时隙至少有一个 传输的概率为 =1一(1一po) ,平均连续空闲时隙数就 为E【m】 玄一 。信道活动情况定义为:高,这里 7_是一个完整信息包传输所需要的时间。 由于在活动时隙里只有成功传输信息包才能算 是系统的吞吐量,于是得到系统吞吐量的概率为: 一月Po(1一Po) 一 一l—r1一Po) ,因此有: (4) 其中y是一个与网络7-有关的常数。从式 (1)~(4)可以看到,吞吐量S通过 。与竞争窗口 有关。W的最优化通过下面最普通的极值求导公式: =丢 dPo。。。。,通过计算最后得到: 、 而一 —— 一 一.4-f 结 等 。 高衔 【5)W ≈n42T 、 78 I 蚤蔫 这就得到了网络节点数为n的竞争窗口白适应算法 值,其中7_是成功传输包所需要的时间。 (2)基于自适应竞争窗口的R—NAD算法 参见式(1】可知,当 =1时。就是最常用的随 机网络接入延迟。但是,如果 运用自适应竞争窗口算 法,可以知道,此时的式(1】应该变为: t--. NAD=Random(4,z 42T)xaSlotTim (6)
其中n为网络节点数。陧一个完整信息包传输所需 要的时间(包含前同步时间,同步传输时间,数据传输 时间,ACK应答时间)。
R—NAD协议算法由五个状态组成,分别是“预 发射”、 “发射”、 “等TP定时器”、 “等NAD定时 器”、“沉默”,状态转移图和转移条件如图1所示:
。\数据发送完毕. 发射 启动RHD定时嚣 准备回送ACK
检测到信道忙或 数据碰撞
图1 R—NAD协议算法的有限状态机 在“预发射”状态系统可进行数据的接收和预发 射操作。此时,系统已经完成数据的接收,或者有数据 要发送,它检查系统发送队列是否为空,若发送队列为 空,则进入“发射”状态进行发送;否则进入“等TP定 时器”状态。 “发射”状态表示系统正在发送一个数据分组。此 时,系统将禁止新的发送请求,直到分组发送完毕。理 想情况下,在“发射”状态系统不应该收到其它站发出 的分组。 “等TP定时器”状态用于TP定时器。TP定时器是为 减少公共信道冲突和解决“隐终端”问题而设置的。当 终端收到不是给本站的需要应答的报文时,系统应启动
责任编辑:吴竹立wuzhuli@mbcom.cn TP定时器等待一段时间,保证目的站点顺利发送应答信 息。当收 ̄JRTS发送请求和发送允许CTS时,系统应根据 分组中所带的报文长度字段计算TP,保证在报文发送过 程中不会出现冲突。 “等NAD定时器”状态表示当TP定时器终止的时候 应启动NAD定时器来竞争信道,以便本站有机会将自己 的消息在适当的时候发送出去。理想情况下,在转移到 “等NAD定时器”状态的开始一段时间内,网络应该处 于空闲状态。 “沉默”状态表示等ACK定时器,或者是收到优先 权较高的C2信息。那么,ACK定时器超时后就进入“预 发射”状态进行信道竞争。 依托OPNET[4 仿真工具来构建网络模型。网络由1 6 个节点组成,9个主动,同时各个节点全连通,均匀分 布在9km X 9km的矩形区域里,通过无线链路通信。地 形是无遮挡、高差在5m~10m的小起伏,网络具有良好 的电磁环境。暂时不考虑节点移动,负载不分优先级。 模型主要是为了分析出R—NAD算法中影响网络性能的 重要参数和最合适的值,比较R—NAD以及基于自适应 窗口算法的R—NAD的性能,所以模型简化了220C的链 路层和物理层。假定设备滞后时间(ELA G)、DTE周 转时间(DTETU RN)、DTE处理时间(DTE PROC) 等均为零,则仿真的结果将直接反映R—NAD算法的效 果。 在我们的仿真实验中,根据220C协议特性.发射机 和接收机的信道数据传输速率为1 6348bps,整个网络 的负载由1个业务模型产生。具体业务包括基于C2和基 于SA两大类,随机分配给不同站点,业务到达的时间间 隙服从指数分布,其中C2包平均到达间隔为10s,包大 小为1024字节;SA包平均到达间隔为1s,包大小为576 或30字节。 3仿真结果及分析 辩一 4趣 0 文l毪 0 参考CNRWG一188—220C—MAC—Params中的设置 责任编辑:吴竹立wuzhuli@mbcom O13 设定RHD0=0 6s,TP0=O 1 75s,SlotTime=O.028s, B=250s,NBDT=O.6s,CW=1。协议中约定,重传次 数0~5次缺省2次,选定RetransMax=3。同时,本次仿 真中拓扑模型使用16个站,所以NAD—Max初始化值为 NA Max仂it=12。 因ETE平均时间决定了网络的吞吐量,所以我们研 究了NBDT、RHD0、SlotTime--个参数和ETE的关系,仿 真对比分析三个参数分别改变时对ETE性能的影响。 (1】考虑NBD 7_(0.6s)、RHD 0(0.6s)不 变,Slot 7-,,77e变。由于Slot 7Vme影响退避的NAD 时间,SlotTime应保证NAD不要太大,以/\/日 7_为 标准。NBDT=0.6s、SlotTime最大值=0.6/1 2= 0.05s的仿真结果如图2所示,对ETE的影响不大,而 且改变趋势不明显。
40 35
苗 斋25
山 山 20
0.OO 0 01 0 O2 O O3 O 04 0.O5 Slot tim e
图2 SlotTime变化与ETEqz均值、最大值(s)的关系 (2)S/otTime(0.028s)和BNDT(0.6s)不 变,RHD0变化比较大,从0.00002s ̄0.6s。仿真结果 反映出RHD。的改变对 的影响比较大,ETE: ̄Z均值 最大差距有20秒,f 嘬大值最大差距有200秒,如图 3所示:
20 0蚤痞4 l 79 1年第1期I,
删 ~ 枷 一 枷 ㈣ |lⅢ 强硪;设计与实现i; 1 岳10
舔 E 1 0
1OO
图3 ? 。变化与ETE#-均值、最大值(s)的关系 (3)SlotT/me【0.028s)和 (0.6s)不变, NBDTjL) ̄O.00002s ̄0.6s变化。仿真结果反映出NBD确 改变对 的影响比较大。ETE4Z均值最大差距有2O秒, 嘬大值最大差距有1 50秒,如图4所示:
∞ 26
n,2o 善, 葛
,。
5
蔓 岩,00
图4 NBD 7_变化与ETE ̄-均值、最大值(s)的关系 80 I 筹 痞
从以上分析可以看出,220C中影响MAC层协议 性能的关键因素是NBDT和RHD。。由于它们的计算 公式中共有朋尸 、ELAG和TOL占各自3/4(分别是 230ms、157ms、50ms,合计436ms),所以这两个 参数的改善基本是同步的。若能提高ERPE、ELAG、 TOL,就能使性能明显提高。综合ETE ̄-均值和 最 大值,可以看出,NBDTTFi]RHD。的最佳设定在0.1 s左 右。
:=一 薹 拉 0篓≥ 。 0 、。 . 在给定的网络场景下,仿真对比分析R~NAD(即公 式(1】中CW=1】、R—NAD与白适应竞争窗口算法相 结合(即公式(6))两种情况下的网络性能。其中网络 参数设置如前面所示,只改变NBDl ̄i]RHD。,两者都为 0.1S。在上述网络模型164"节点中,仿真得到的吞吐性 能和端到端迟延特性如图5和6所示: