压力传感器数据融合算法研究
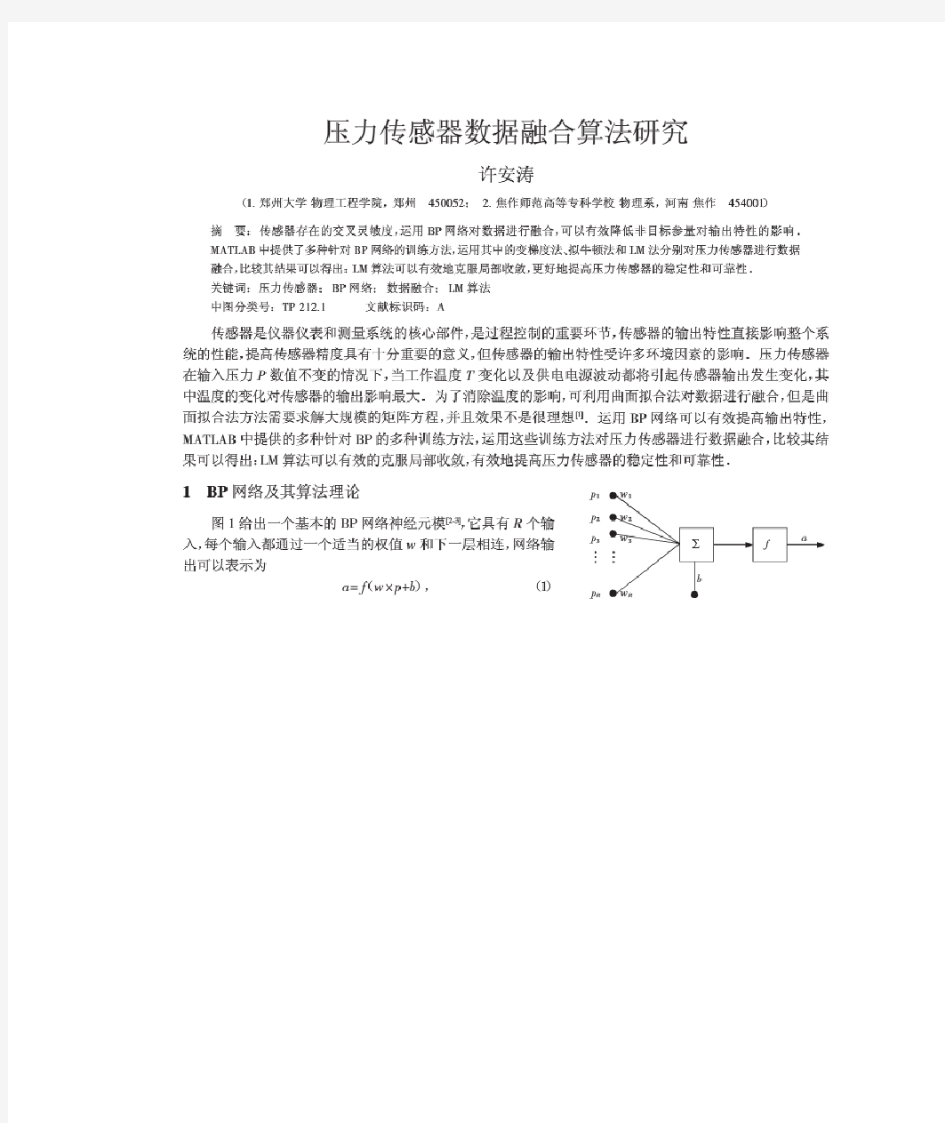

(完整版)信息融合算法
信息融合算法 1 概述 信息融合又称数据融合,是对多种信息的获取、表示及其内在联系进行综合处理和优化的技术。经过融合后的传感器信息具有以下特征:信息冗余性、信息互补性、信息实时性、信息获取的低成本性。 1、组合:由多个传感器组合成平行或互补方式来获得多组数据输出的一种处理方法,是一种最基本的方式,涉及的问题有输出方式的协调、综合以及传感器的选择。在硬件这一级上应用。 2、综合:信息优化处理中的一种获得明确信息的有效方法。 例:在虚拟现实技术中,使用两个分开设置的摄像机同时拍摄到一个物体的不同侧面的两幅图像,综合这两幅图像可以复原出一个准确的有立体感的物体的图像。 3、融合:当将传感器数据组之间进行相关或将传感器数据与系统内部的知识模型进行相关,而产生信息的一个新的表达式。 4、相关:通过处理传感器信息获得某些结果,不仅需要单项信息处理,而且需要通过相关来进行处理,获悉传感器数据组之间的关系,从而得到正确信息,剔除无用和错误的信息。 相关处理的目的:对识别、预测、学习和记忆等过程的信息进行综合和优化。
2 技术发展现状 信息融合技术的方法,概括起来分为下面几种: 1)组合:由多个传感器组合成平行或互补方式来获得多组数据 输出的一种处理方法,是一种最基本的方式,涉及的问题有 输出方式的协调、综合以及传感器的选择。在硬件这一级上 应用。 2)综合:信息优化处理中的一种获得明确信息的有效方法。例: 在虚拟现实技术中,使用两个分开设置的摄像机同时拍摄到 一个物体的不同侧面的两幅图像,综合这两幅图像可以复原 出一个准确的有立体感的物体的图像。 3)融合:当将传感器数据组之间进行相关或将传感器数据与系 统内部的知识模型进行相关,而产生信息的一个新的表达式。 4)相关:通过处理传感器信息获得某些结果,不仅需要单项信 息处理,而且需要通过相关来进行处理,获悉传感器数据组 之间的关系,从而得到正确信息,剔除无用和错误的信息。 相关处理的目的:对识别、预测、学习和记忆等过程的信息 进行综合和优化。 3 算法描述 3.1 Bayes融合 Bayes融合是融合静态环境中多传感器低层数据的一种常用方法。
多传感器信息融合方法综述
万方数据
万方数据
万方数据
万方数据
万方数据
多传感器信息融合方法综述 作者:吴秋轩, 曹广益 作者单位:上海交通大学电子信息与电气工程学院,上海,200030 刊名: 机器人 英文刊名:ROBOT 年,卷(期):2003,25(z1) 被引用次数:2次 参考文献(5条) 1.周锐;申功勋;房建成基于信息融合的目标图像跟踪 1998(12) 2.张尧庭;桂劲松人工智能中的概率统计方法 1998 3.何友;王国宏;彭应宁多传感器信息融合 2000 4.罗志增;叶明Bayes方法的多感觉信息融合算法及其应用[期刊论文]-传感技术学报 2001(03) 5.张文修;吴伟业;梁吉业粗糙集理论与方法 2001 本文读者也读过(8条) 1.臧大进.严宏凤.王跃才.ZANG Da-jin.YAN Hong-feng.WANG Yue-cai多传感器信息融合技术综述[期刊论文]-工矿自动化2005(6) 2.多传感器信息融合及应用[期刊论文]-电子与信息学报2001,23(2) 3.赵小川.罗庆生.韩宝玲.ZHAO Xiao-chuan.LUO Qing-sheng.HAN Bao-ling机器人多传感器信息融合研究综述[期刊论文]-传感器与微系统2008,27(8) 4.范新南.苏丽媛.郭建甲.FAN Xin-nan.SU Li-yuan.GUO Jian-jia多传感器信息融合综述[期刊论文]-河海大学常州分校学报2005,19(1) 5.咸宝金.陈松涛智能移动机器人多传感器信息融合及应用研究[期刊论文]-宇航计测技术2010,30(2) 6.韩增奇.于俊杰.李宁霞.王朝阳信息融合技术综述[期刊论文]-情报杂志2010,29(z1) 7.肖斌多传感器信息融合及其在工业中的应用[学位论文]2008 8.丁伟.孙华.曾建辉.DING Wei.SUN Hua.ZENG Jian-hui基于多传感器信息融合的移动机器人导航综述[期刊论文]-传感器与微系统2006,25(7) 引证文献(2条) 1.武伟.郭三学基于多传感信息融合的轮胎气压监测系统[期刊论文]-轮胎工业 2006(5) 2.魏东.杨洋.李大寨.宗光华基于多传感器融合的机器人微深度环切[期刊论文]-传感器技术 2005(11) 本文链接:https://www.360docs.net/doc/f74943471.html,/Periodical_jqr2003z1037.aspx
多传感器数据融合技术研究进展_黄漫国
2010年第29卷第3期 传感器与微系统(T r a n s d u c e r a n dM i c r o s y s t e mT e c h n o l o g i e s) 多传感器数据融合技术研究进展* 黄漫国1,2,樊尚春1,2,郑德智1,邢维巍1 (1.北京航空航天大学仪器科学与光电工程学院精密光机电一体化教育部重点实验室,北京100191; 2.传感技术联合国家重点实验室,上海200050) 摘 要:多传感器数据融合是信息领域一个前景广阔的研究方向。由于单一的数据融合算法具有一定的 局限性,将2种或2种以上的数据融合算法进行优势集成已逐渐成为数据融合领域的研究热点。介绍了 数据级、特征级和决策级融合3种数据融合方式的主要特点、方法及应用,归纳了常用的数据融合方法,并 重点阐述了几种多传感器数据融合集成算法的研究进展,简单介绍了多传感器数据融合技术的应用。 关键词:多传感器;数据融合;算法;集成 中图分类号:T P274 文献标识码:A 文章编号:1000—9787(2010)03—0005—04 R e s e a r c hp r o g r e s s o f m u l t i-s e n s o r d a t a f u s i o n t e c h n o l o g y* H U A N GM a n-g u o1,2,F A NS h a n g-c h u n1,2,Z H E N GD e-z h i1,X I N GW e i-w e i1 (1.K e yL a b o r a t o r y o f P r e c i s i o nO p t o-m e c h a n i c s T e c h n o l o g yo f Mi n i s t r y o f E d u c a t i o n,D e p t a r t m e n t o f I n s t r u m e n t S c i e n c e&O p t o-e l e c t r o n i c s E n g i n e e r i n g,B e i h a n gU n i v e r s i t y,B e i j i n g100191,C h i n a; 2.S t a t e K e yL a b o r a t o r i e s o f T r a n s d u c e r T e c h n o l o g y,S h a n g h a i200050,C h i n a) A b s t r a c t:M u l t i-s e n s o r d a t af u s i o ni s w i d er e s e a r c hb r a n c hi ni n f o r m a t i o nf i e l d.A s s i n g l ed a t a f u s i o na l g o r i t h m a l w a y s h a s s o m e l i m i t a t i o n s,t h e i n t e g r a t i o no f t w o o r m o r e d a t a f u s i o na l g o r i t h m s i s b e c o m i n g a r e s e a r c h i n t e r e s t. A d v a n t a g e s o f d a t af u s i o na r ei n t r o d u c e d;m a i nc h a r a c t e r i s t i c s,a l g o r i t h m s a n da p p l i c a t i o n s o f t h r e ed a t af u s i o n m o d e l t y p e s(d a t a l e v e l,c h a r a c t e r i s t i c l e v e l a n d d e c i s i o nl e v e l)a r e p r e s e n t e d.C o m m o n d a t a f u s i o n a l g o r i t h m s a r e c l a s s i f i e d.R e s e a r c h d e v e l o p m e n t s o f s e v e r a l d a t a f u s i o ni n t e g r a t i o na l g o r i t h m s a r e r e v i e w e d.A p p l i c a t i o n so f d a t a f u s i o n t e c h n o l o g ya r e a l s o d i s c u s s e d. K e yw o r d s:m u l t i-s e n s o r;d a t a f u s i o n;a l g o r i t h m s;i n t e g r a t i o n 0 引 言 根据J D L(j o i n t d i r e c t o r so f l a b o r a t o r i e s d a t af u s i o nw o r-k i n gg r o u p)的定义,多传感器数据融合是一种针对单一传感器或多传感器数据或信息的处理技术,通过数据关联、相关和组合等方式以获得对被测环境或对象的更加精确的定位、身份识别以及对当前态势和威胁的全面而及时的评估[1]。 “数据融合”一词出现在20世纪70年代初期,当时并未引起人们的足够重视,只是局限于军事应用方面的研究[2]。指令控制和通信一体化(c o m m a n dc o n t r o l a n dc o m-m u n i c a t i o ni n t e g r a t i o n,C3I)系统率先采用多传感器数据融合技术来采集和处理战场信息并获得成功[3]。而随着工业系统的复杂化和智能化,数据融合近三十多年来取得了迅速发展。如今世界各国都有学者和技术人员在开展数据融合技术的研究,这一领域的研究内容和成果已大量出现在各种学术会议和公开的学术期刊上[4]。近几年,我国对数据融合方面的研究也日益重视,国家自然科学基金和“863”计划已将其列入重点支持项目。各大学、研究机构都在进行学术与工程应用的研究,并做了大量的基础研究工作[5]。 1 数据融合的层次及其分类 1.1 数据融合的层次 多传感器数据融合与经典信号处理方法之间也存在本质的区别,其关键在于数据融合所处理的多传感器信息具有更复杂的形式,而且,可以在不同的信息层次上出现,每个层次代表了对数据不同程度的融合过程,这些信息抽象层次包括数据层(像素级)、特征层和决策层[6]。相应的数据融合也主要有数据级、特征级和决策级融合3种方式,表1对其所属层次、主要特点、方法及应用进行了总结归纳。 收稿日期:2009—07—08 *基金项目:国家“863”计划资助项目(2008A A042207) 5
JJG 860—94压力传感器(静态)检定规程
压力传感器(静态)检定规程 JJG 860—94 本规程主要起草人:许新民(航空工业总公司第304研究所) 郭春山(中国计量科学研究院) 张首君(中国计量科学研究院) 参加起草人:陈景文(航空工业总公司第304研究所) 目次 一概述 二技术要求 三检定条件 四检定项目和检定方法 五检定结果处理和检定周期 附录1 压力传感器检定记录格式 附录2 检定证书内容格式(1) 附录3 检定证书内容格式(2) 压力传感器(静态)检定规程 本检定规程适用于新制造、使用中和修理后的压力传感器的静态检定。 一概述 压力传感器是一种能感受压力,并按照一定的规律将压力转换成可用输出信号(一般为电信号)的器件或装置,通常由压力敏感元件和转换元件组成。 按压力测试的不同类型,压力传感器可分为表压传感器、差压传感器和绝压传感器等。 二技术要求 1压力传感器的准确度等级和允许基本误差应符合表1规定。 表1 2压力传感器的配套应完整,外观不应有影响计量性能的锈蚀和损伤。各部件应装配牢固,不应有松动,脱焊或接触不良等现象。 3压力传感器在外壳上或外壳的铭牌上应清楚地标明其型号和编号。压力传感器的名称、
测量范围、准确度等级、制造厂家、制造日期及工作电源可在外壳或铭牌上标明,或在相应的技术文件中说明。 4差压传感器的高压(+)和低压(-)接嘴应有明确的永久性标志。 5压力传感器的电源端和信号输出端应有明确的区别标志。 6重复性误差。压力传感器的重复性误差不得大于允许基本误差的绝对值。 7回程误差。压力传感器的回程误差不得大于允许基本误差的绝对值。 8线性误差。压力传感器的线性误差的绝对值不得大于允许基本误差的绝对值。非线性压力传感器对此不作要求。 三检定条件 9 压力标准器 压力标准器选择的基本原则是其基本误差的绝对值应小于被检压力传感器基本误差绝对值的1/3。准确度等级为0.05级的压力传感器允许采用一等标准器(±0.02%)作为压力标准器。 压力标准器可选用工作基准活塞式压力计、工作基准微压计、标准活塞式压力计、标准活塞式压力真空计、气体活塞式压力计、标准浮球式压力计、标准液体压力计、补偿式微压计、数字式压力计、精密压力表及其他相应准确度等级的压力计量标准器。 10 检定设备 10.1激励电源。激励电源应按压力传感器要求配套,除非压力传感器对激励电源稳定性无特殊要求,否则其稳定度应为被检压力传感器允许基本误差绝对值的1/5~1/10,可选用精密稳压电源、稳流电源、干电池或蓄电池等。 10.2读数记录装置。检定压力传感器用的读数记录装置基本误差的绝对值应小于被检压力传感器允许基本误差绝对值的1/5~1/10,可选用数字式电压表、数字式频率计、电流表等。 10.3其他设备。真空计、数字式气压计(或标准气压表)、温度计、湿度计、精密电阻箱等。 10.4与压力标准器配套使用的加压(或抽空)系统应在示值检定范围内连续可调。 11 环境条件 11.1检定时的环境温度视被检压力传感器的准确度等级而定,应符合下列要求: 0.01、0.02级20±1℃ 0.05级20±2℃ 0.1、0.2、0.5级20±3℃ 其他等级20±5℃ 11.2检定前,压力传感器应在检定的环境温度下放置2h以上,方可进行检定。 11.3相对湿度:小于80% 大气压力:86~106kPa 四检定项目和检定方法 12 外观检查 12.1使用中的压力传感器应有前次检定证书,新制造的或修理后的压力传感器应有出厂合格证书。 12.2检查压力传感器的外观应符合本规程第2~5条要求。
多传感器数据融合技术的理论及应用
多传感器数据融合技术的理论及应用 张宁110101256 摘要:多传感器数据融合技术是一门新兴前沿技术。近年来,多传感器数据融合技术已经受到广泛关注,它的理论和方法已经被应用到许多研究领域。本文主要论述了多传感器数据融合的基本概念、工作原理、数据融合特点与结构、数据融合方法及其应用领域,并总结了当前数据融合研究中存在的主要问题及其发展趋势。 关键词:多传感器;数据融合;融合方法 1引言 多传感器数据融合是一个新兴的研究领域,是针对一个系统使用多种传感器这一特定问题而展开的一种关于数据处理的研究。多传感器数据融合技术是近几年来发展起来的一门实践性较强的应用技术,是多学科交叉的新技术,涉及到信号处理、概率统计、信息论、模式识别、人工智能、模糊数学等理论。近年来,多传感器数据融合技术无论在军事还是民事领域的应用都极为广泛。多传感器数据融合技术已成为军事、工业和高技术开发等多方面关心的问题。这一技术广泛应用于复杂工业过程控制、机器人、自动目标识别、交通管制、惯性导航、海洋监视和管理、农业、医疗诊断、模式识别等领域。实践证明:与单传感器系统相比,运用多传感器数据融合技术在解决探测、跟踪和目标识别等问题方面,能够增强系统生存能力,提高整个系统的可靠性和鲁棒性,增强数据的可信度,并提高精度,扩展整个系统的时间、空间覆盖率,增加系统的实时性和信息利用率等。 2基本概念及融合原理 2.1多传感器数据融合概念 数据融合又称作信息融合或多传感器数据融合,对数据融合还很难给出一个统一、全面的定义。随着数据融合和计算机应用技术的发展,根据国内外研究成果,多传感器数据融合比较确切的定义可概括为:充分利用不同时间与空间的多传感器数据资源,采用计算机技术对时间序列获得的多传感器观测数据,在一定准则下进行分析、综合、支配和使用,获得对被测对象的一致性解释与描述,进而实现相应的决策和估计,使系统获得比它的各组成部分更充分的信息。
数据融合方法优缺点
数据融合方法 随着交通运行状态评价研究的不断发展,对数据的准确性和广泛覆盖性提出了更高的要求,在此基础上,不同的数据融合模型被引进应用于交通领域中来计算不同检测设备检测到的数据。现阶段,比较常用的数据融合方法主要有:表决法、模糊衰退、贝叶斯汇集技术、BP神经网络、卡尔曼滤波法、D.S理论等方法。 1现有方法应用范围 结合数据融合层次的划分,对数据融合方法在智能交通领域的应用作以下归纳总结: 表数据融合层次及对应的方法 2各种融合方法的优缺点 主要指各种融合方法的理论、应用原理等的不同,呈现出不同的特性。从理论成熟度、运算量、通用性和应用难度四个方面进行优缺点的比较分析,具体内容如下: (1)理论成熟度方面:卡尔曼滤波、贝叶斯方法、神经网络和模糊逻辑的理论已经基本趋于成熟;D—S证据推理在合成规则的合理性方
面还存有异议;表决法的理论还处于逐步完善阶段。 (2)运算量方面:运算量较大的有贝叶斯方法、D.S证据推理和神经网络,其中贝叶斯方法会因保证系统的相关性和一致性,在系统增加或删除一个规则时,需要重新计算所有概率,运算量大;D.S证据推理的运算量呈指数增长,神经网络的运算量随着输入维数和隐层神经元个数的增加而增长;运算量适中的有卡尔曼滤波、模糊逻辑和表决法。 (3)通用性方面:在这六种方法中,通用性较差的是表决法,因为表决法为了迁就原来产生的框架,会割舍具体领域的知识,造成其通用性较差;其他五种方法的通用性相对较强。 (4)应用难度方面:应用难度较高的有神经网络、模糊逻辑和表决法,因为它们均是模拟人的思维过程,需要较强的理论基础;D.S证据推理的应用难度适中,因其合成规则的难易而定:卡尔曼滤波和贝叶斯方法应用难度较低。 3 适用的交通管理事件 之前数据融合技术在交通领域中的应用多是在例如车辆定位、交通事件识别、交通事件预测等交通事件中,但是几乎没有数据融合技术在交通运行状态评价的应用研究,而本文将数据融合技术应用在交通运行状态评价中,为了寻找到最适用于交通运行状态评价的数据融合技术方法,有必要将之前适用于其它交通管理事件的数据融合技术进行评价比较。 表2 各种融合方法适用的交通管理事件的比较
多传感器数据融合
多传感器数据融合 多传感器数据融合1引言数据融合一词最早出现在20世纪70年代末期。几十年来,随着传感器技术的迅速发展,尤其在军事指挥系统中对提高综合作战能力的迫切要求,使其得到了长足的发展。其早期主要是应用在军事上,而随着工业系统的复杂化和智能化,近年来该技术推广到了民用领域,如医疗诊断、空中交通管制、工业自动控制及机械故障诊断等。数据融合是针对一个系统中使用多个传感器这一问题而展开的一种信息处理的新的研究方向,所以数据融合也称为传感器融合。数据融合一直没有一个统一的定义,一般认为:利用计算机技术,对按时间顺序获得的若干传感器的观测信息,在一定的准则下加以自动分析、综合,从而完成所需要的决策和估计任务而进行的信息处理过程称为数据融合。2
数据融合技术的分类多传感器数据融合涉及到多方面的理论和技术如信号处理、估计理论、不确定性理论、模式识别最优化技术、神经网络和人工智能等。很多学者从不同角度出发提出了多种数据融合技术方案。从技术原理角度,可分为假设检验型数据融合、滤波跟踪型数据融合、聚类分析型数据融合、模式识别型数据融合、人工智能型数据融合等;按判决方式分有硬判决型和软判决型数据融合;按传感器的类型分有同类传感器数据融合和异类传感器数据融合按对数据的处理方式,可分为象素级融合、特征级融合和决策级融合;从方法来分有Bayes推理法、表决法、D-S 推理法、神经网络融合法等。从解决信息融合问题的指导思想或哲学观点加以划分,可分为嵌入约束观点、证据组合观点和人工神经网络观点三大类。3常用的数据融合方法数据融合方法种类繁多,图1归纳了常用的一些信息融合方法。估计方法
多传感器数据融合算法.
一、背景介绍: 多传感器数据融合是一种信号处理、辨识方法,可以与神经网络、小波变换、kalman 滤波技术结合进一步得到研究需要的更纯净的有用信号。 多传感器数据融合涉及到多方面的理论和技术,如信号处理、估计理论、不确定性理论、最优化理论、模式识别、神经网络和人工智能等。多传感器数据融合比较确切的定义可概括为:充分利用不同时间与空间的多传感器数据资源,采用计算机技术对按时间序列获得的多传感器观测数据,在一定准则下进行分析、综合、支配和使用,获得对被测对象的一致性解释与描述,进而实现相应的决策和估计,使系统获得比它的各组成部分更充分的信息。 多传感器信息融合技术通过对多个传感器获得的信息进行协调、组合、互补来克服单个传感器的不确定和局限性,并提高系统的有效性能,进而得出比单一传感器测量值更为精确的结果。数据融合就是将来自多个传感器或多源的信息在一定准则下加以自动分析、综合以完成所需的决策和估计任务而进行的信息处理过程。当系统中单个传感器不能提供足够的准确度和可靠性时就采用多传感器数据融合。数据融合技术扩展了时空覆盖范围,改善了系统的可靠性,对目标或事件的确认增加了可信度,减少了信息的模糊性,这是任何单个传感器做不到的。 实践证明:与单传感器系统相比,运用多传感器数据融合技术在解决探测、跟踪和目标识别等问题方面,能够增强系统生存能力,提高整个系统的可靠性和鲁棒性,增强数据的可信度,并提高精度,扩展整个系统的时间、空间覆盖率,增加系统的实时性和信息利用率等。信号级融合方法最简单、最直观方法是加权平均法,该方法将一组传感器提供的冗余信息进行加权平均,结果作为融合值,该方法是一种直接对数据源进行操作的方法。卡尔曼滤波主要用于融合低层次实时动态多传感器冗余数据。该方法用测量模型的统计特性递推,决定统计意义下的最优融合和数据估计。 多传感器数据融合虽然未形成完整的理论体系和有效的融合算法,但在不少应用领域根据各自的具体应用背景,已经提出了许多成熟并且有效的融合方法。多传感器数据融合的常用方法基本上可概括为随机和人工智能两大类,随机类方法有加权平均法、卡尔曼滤波法、多贝叶斯估计法、产生式规则等;而人工智能类则有模糊逻辑理论、神经网络、粗集理论、专家系统等。可以预见,神经网络和人工智能等新概念、新技术在多传感器数据融合中将起到越来越重要的作用。 数据融合存在的问题 (1)尚未建立统一的融合理论和有效广义融合模型及算法; (2)对数据融合的具体方法的研究尚处于初步阶段; (3)还没有很好解决融合系统中的容错性或鲁棒性问题; (4)关联的二义性是数据融合中的主要障碍; (5)数据融合系统的设计还存在许多实际问题。 二、算法介绍: 2.1多传感器数据自适应加权融合估计算法: 设有n 个传感器对某一对象进行测量,如图1 所示,对于不同的传感器都有各自不同的加权因子,我们的思想是在总均方误差最小这一最优条件下,根据各个传感器所得到的测量值以自适应的方式寻找各个传感器所对应的最优加权因子,使融合后的X值达到最优。
最小二乘法在二传感器信息融合中的应用
最小二乘法在传感器信息融合中的应用 摘要本文用多维回归方程建立被测目标参量与传感器输出量 之间的对应关系。并进行多维标定/校准试验,然后,按 最小二乘法原理由试验标定/校准数据计算出均方误差最 小条件的回归方程中的系数。用已知系数的多维回归方程 计算出相应的输入被测目标参数。 关键词最小二乘法信息融合传感器 1引言 通常传感器都存在交叉灵敏度,表现在传感器的输出值不仅决定于一个参量,当其他参量变化时输出值也要发生变化。传感器信息融合技术就是通过对多个参数的监测并采用一定的信息处理方法达到提高每一个参量测量精度的目的。在只要求测量一个目标参量的场合,为达到提高被测目标参量的测量精度的目的,其他参量都是干扰量,其影响应被消除,既然检测了多个参量,每一个参量测量精度都获得提高。 压阻式压力传感器存在对静压、温度的交叉灵敏度,尤其是对温度的敏感成为它最大的缺点。人们为了消除温度对它的影响付出了长期的努力和高昂的代价。近来此类传感器采用了信息融合处理技术使得温度附加误差小于±0.25%FS/55℃,测量精度达到(0.1-0.075)%FS。 本文用多维回归方程建立被测目标参量与传感器输出量之间的对应关系。并进行多维标定/校准试验,然后,按最小二乘法原理由试验标定/校准数据计算出均方误差最小条件的回归方程中的系数。这样,测量时当测得了传感器的输出值,就可用已知系数的多维回归方程计算出相应的输入被测目标参数。 2二传感器信息融合智能传感器 已知压力传感器输出电压U,且存在温度灵敏度。因此只对压力传感器进行一维标定实验,并由此获得输入(压力P)与输出(电压U)特性曲线来求取被测压力值会有较大误差。因为被测压力P不是输出值U的一元函数。现在由另一温度传感器输出电压Ut代表温度信息t,则压力参量P可以用U及Ut二元函数来表示才较完备,即 ) , (Ut P f P=① 同理,可将压力传感器输出电压U描述为压力参量P和温度传感器输出Ut 的二元函数,即 ) , (Ut P g U=② 由二维坐标(U k ,U tk )决定的P k 在一平面上,可利用曲面拟合方程,即二维回 归方程来描述,同样,由二维坐标(P k ,U tk )决定的U k 也在一个平面上,也可由 二维回归方程来描述。 如果回归方程中的各个系数已知,那么用于检测压力P和输出U的二元输入-输出特性,即曲面拟合方程就确定了。为此,首先要进行二维标定实验,然后
传感器的标定与校准
标定与校准的概念 新研制或生产的传感器需要对其技术性能进行全面的检定,以确定其基本的静、动态特性,包括灵敏度、重复性、非线性、迟滞、精度及固有频率等。 例如,对于一个压电式压力传感器,在受力后将输出电荷信号,即压力信号经传感器转换为电荷信号。但是,究竟多大压力能使传感器产生多少电荷呢?换句话说,我们测出了一定大小的电荷信号,但它所表示的加在传感器上的压力是多大呢? 这个问题只靠传感器本身是无法确定的,必须依靠专用的标准设备来确定传感器的输入――输出转换关系,这个过程就称为标定。简单地说,利用标准器具对传感器进行标度的过程称为标定。具体到压电式压力传感器来说,我们用专用的标定设备,如活塞式压力计,产生一个大小已知的标准力,作用在传感器上,传感器将输出一个相应的电荷信号,这时,再用精度已知的标准检测设备测量这个电荷信号,得到电荷信号的大小,由此得到一组输入――输出关系,这样的一系列过程就是对压电式压力传感器的标定过程,如图1-19所示。 图1-19 压电式压力传感器输入――输出关系 校准在某种程度上说也是一种标定,它是指传感器在经过一段时间储存或使用后,需要对其进行复测,以检测传感器的基本性能是否发生变化,判断它是否可以继续使用。因此,校准是指传感器在使用中或存储后进行的性能复测。在校准过程中,传感器的某些指标发生了变化,应对其进行修正。 标定与校准在本质上是相同的,校准实际上就是再次的标定,因此,下面都以标定为例作介绍。 1.7.2 标定的基本方法 标定的基本方法是,利用标准设备产生已知的非电量(如标准力、位移、压力等),作为输入量输入到待标定的传感器,然后将得到的传感器的输出量与输入的标准量作比较,从而得到一系列的标定数据或曲线。例如,上述的压电式压力传感器,利用标准设备产生已知大小的标准压力,输入传感器后,得到相应的输出信号,这样就可以得到其标定曲线,根据标定曲线确定拟合直线,可作为测量的依据,如图1-20所示。
数据融合各种算法整理汇总
数据融合各种算法及数学知识汇总 粗糙集理论 理论简介 面对日益增长的数据库,人们将如何从这些浩瀚的数据中找出有用的知识? 我们如何将所学到的知识去粗取精?什么是对事物的粗线条描述什么是细线条描述? 粗糙集合论回答了上面的这些问题。要想了解粗糙集合论的思想,我们先要了解一下什么叫做知识?假设有8个积木构成了一个集合A,我们记: A={x1,x2,x3,x4,x5,x6,x7,x8},每个积木块都有颜色属性,按照颜色的不同,我们能够把这堆积木分成R1={红,黄,蓝}三个大类,那么所有红颜色的积木构成集合X1={x1,x2,x6},黄颜色的积木构成集合X2={x3,x4},蓝颜色的积木是:X3={x5,x7,x8}。按照颜色这个属性我们就把积木集合A进行了一个划分(所谓A的划分就是指对于A中的任意一个元素必然属于且仅属于一个分类),那么我们就说颜色属性就是一种知识。在这个例子中我们不难看到,一种对集合A的划分就对应着关于A中元素的一个知识,假如还有其他的属性,比如还有形状R2={三角,方块,圆形},大小R3={大,中,小},这样加上R1属性对A构成的划分分别为: A/R1={X1,X2,X3}={{x1,x2,x6},{x3,x4},{x5,x7,x8}} (颜色分类) A/R2={Y1,Y2,Y3}={{x1,x2},{x5,x8},{x3,x4,x6,x7}} (形状分类) A/R3={Z1,Z2,Z3}={{x1,x2,x5},{x6,x8},{x3,x4,x7}} (大小分类) 上面这些所有的分类合在一起就形成了一个基本的知识库。那么这个基本知识库能表示什么概念呢?除了红的{x1,x2,x6}、大的{x1,x2,x5}、三角形的{x1,x2}这样的概念以外还可以表达例如大的且是三角形的 {x1,x2,x5}∩{x1,x2}={x1,x2},大三角{x1,x2,x5}∩{x1,x2}={x1,x2},蓝色的小的圆形({x5,x7,x8}∩{x3,x4,x7}∩{x3,x4,x6,x7}={x7},蓝色的或者中的积木{x5,x7,x8}∪{x6,x8}={x5,x6,x7,x8}。而类似这样的概念可以通过求交运算得到,比如X1与Y1的交就表示红色的三角。所有的这些能够用交、并表示的概念以及加上上面的三个基本知识(A/R1,A/R2.A/R3)一起就构成了一个知识系统记为R=R1∩R2∩R3,它所决定的所有知识是 A/R={{x1,x2},{x3,x4},{x5},{x6},{x7},{x8}}以及A/R中集合的并。 下面考虑近似这个概念。假设给定了一个A上的子集合X={x2,x5,x7},那么用我们的知识库中的知识应该怎样描述它呢?红色的三角?****的大圆? 都不是,无论是单属性知识还是由几个知识进行交、并运算合成的知识,都不能得到这个新的集合X,于是我们只好用我们已有的知识去近似它。也就是在所有的现有知识里面找出跟他最像的两个一个作为下近似,一个作为上近似。于是我们选择了“蓝色的大方块或者蓝色的小圆形”这个概念: {x5,x7}作为X的下近似。选择“三角形或者蓝色的”{x1,x2,x5,x7,x8}作为它的上近似,值得注意的是,下近似集是在那些所有的包含于X的知识库
基于BP网络的智能压力传感器系统研究与设计
第24卷第10期2011年10月 传感技术学报 CHINESE JOURNAL OF SENSORS AND ACTUATORS Vol.24No.10Oct.2011 项目来源:陕西省教育厅基金项目(09JK636) 收稿日期:2011-06-01修改日期:2011-07-16 The Research and Design of Intelligent Sensor System Based on BP Network * CUI Jingya ,LV Huimin *,CHENG Sai (Department of Applied physics ,Xi ’an University of Technology ,Xi ’an 710048,China ) Abstract :An intelligent high precision sensor was designed by combining STM32F101C8microprocessor with μC / OS-Ⅱoperating system ,meanwhile ,the corresponding hardware structure and software design were given.By using BP neural network ,two target parameters ,pressure and temperature ,were made do the data combination to reduce the sensitivity of cross-interference.The results show that the sensor can meet the real-time demand under multitask ,and get the performance more accurate ,stable and reliable.Key words :pressure sensor ;BP network ;μC /OS-Ⅱ;STM32F101C8EEACC :1295;7230 doi :10.3969/j.issn.1004-1699.2011.10.011 基于BP 网络的智能压力传感器系统研究与设计 * 崔静雅,吕惠民* , 程赛 (西安理工大学应用物理系,西安710048) 摘要:将STM32F101C8微处理器与μC /OS-Ⅱ操作系统相结合,设计出了一种高精度智能传感器系统,给出了相应的硬件 结构和软件设计。利用BP 神经网络对压力和温度两个目标参量进行数据融合处理,减小了两者相互交叉干扰敏感度。实测结果显示该传感器能满足多任务下的实时性要求,并具有更加精确、稳定、可靠的性能。 关键词:压力传感器;BP 神经网络;μC /OS-Ⅱ;STM32F101C8 中图分类号:TP24 文献标识码:A 文章编号:1004-1699(2011)10-1426-05压力的测控在现代工业自控环境中广泛应用, 涉及水利水电、铁路交通、智能建筑、航空航天、军工等众多行业。随着通讯技术和计算机技术的发展,智能压力传感器技术的发展相对滞后,呈现出“头 脑(计算机)发达,感觉(传感器)迟钝”的现象[1]。为了提高测量精度,如何抑制压力传感器对温度的 交叉敏感性是亟待解决的核心问题 [2] 。 压力传感器的工作原理已经基本定型,通过发 现新的特殊敏感材料[3] 来提高性能已经很困难。目前,国内外常用的解决方法基本有两种:一种是硬件法,但硬件电路大都存在电路复杂、精度低、成本高等缺点 [4] ;另一种是软件法,此类方法是将微处理器与传感器结合起来,利用丰富的软件功能、结合 一定的算法对参量进行数据融合,主要有回归法、最小二阶乘法、神经网络、小波等,其中神经网络具有层次性、联想记忆和并行处理等优点,应用前景良好[5-6] 。近几年,相关文献中多选用BP 神经网络来 提高压力测量的精度[5,7-8] ,但是忽略了温度测量的 准确,且收敛速度慢。本智能传感器系统针对压力 和温度相互交叉干扰的问题,利用BP 神经网络的Levenberg-Marquardt 算法提高了网络收敛速率以及温度和压力两个参量的测量精度,同时在μC /OS -Ⅱ操作平台上,将BP 网络融合算法 嵌入到STM32F101C8微处理器中,实现显示、报警、与PC 机通信等功能,使功能更加完善。 1智能压力传感器的硬件设计 硬件电路的系统方框图如图1所示。 图1 硬件电路系统方框图
手机侧边压力传感器校准方法与制作流程
本技术公开了一种手机侧边压力传感器校准方法,该方法通过按压两个传感器中间的点,获取两个传感器端的压力值,以此为基础,把相邻两个压力传感器的校准系数比例关系,再根据相邻压力传感器的比例关系,最终得到所有传感器间的比例关系,通过该比例关系进行压力传感器的校准。通过本技术可以在没有专业校准设备的情况下,获得各传感器的相对校准系数,由此实现快速、准确地校准。 技术要求 1.一种手机侧边压力传感器校准方法,其特征在于该方法通过按压两个传感器中间的点,获取两个传感器端的压力值,以此为基础,把相邻两个压力传感器的校准系数比例关 系,再根据相邻压力传感器的比例关系,最终得到所有传感器间的比例关系,通过该比 例关系进行压力传感器的校准。 2.如权利要求1所述的手机侧边压力传感器校准方法,其特征在于该方法包括如下步骤: 101、启动校准功能后,用户按压第一传感器和第二传感器中间位置201,分别读出四个 压力传感器的信号值为A1,A2,A3,A4; 102、按压第二传感器和第三传感器中间位置202得到B1,B2,B3,B4;
103、按压第三传感器和第四传感器中间位置203,等到C1,C2,C3,C4; 104、计算,获取各传感器的相对校准系数。 105、然后通过相对校准系数,可以精确获知用户按压了什么位置,以此进行校准。 3.如权利要求2所述的手机侧边压力传感器校准方法,其特征在于所述104步骤中,利用公式P1=R1*A1,其中P1为传感器1处的压力值,R1为传感器101的校准系数,A1为传感器101输出的信号量; 当按压两个传感器中间位置201时,传感器101与102感受到的压力值是相同的即: P1=P2R1*A1=R2*A2R2=R1*A1/A2 依此类推: 当按压两个传感器中间位置202时,P2=P3R2*B2=R3*B3R3=R2*B2/B3 当按压两个传感器中间位置203时,P3=P4R3*C3=R4*C4R4=P3*C3/C4 由于测定按压位置的识别只有两个通道间的压力比例相关,与压力大小无关。 因此我们可以设定R1为1.0,则: R1=1.0; R2=A1/A2; R3=(A1/A2)*(B2/B3); R4=(A1/A2)*(B2/B3)*(C3/C4)。 技术说明书 一种手机侧边压力传感器校准方法 技术领域
智能压力传感器的数据处理过程和发展现状
智能压力传感器的数据处理过程和发展现状随着计算机和测控系统的发展,传感器技术也得到进一步提升,智能传感器系统现已作为一个新兴研究方向,受到越来越多研究人员的关注。最近几年他的研究虽有一定的成果,但对于日益发展的需求远远不能满足,尤其在压力传感器产品的开发方面更加需要发展。随着压力测控系统的发展,现有的传统压力测量产品已无法满足要求,通常需要它集信息采集、信息处理和数字通信功能于一身,能实现自主管理,具有智能化特性,这样就需要更加智能的压力传感器。智能传感器一般都带有微处理机,具有采集、处理、交换信息的能力,是传感器集成化与微处理机相结合的产物。通常一个控制系统的感觉部分由多个传感器集合而成,采集的信息送到计算机进行处理,而使用智能传感器以后就可将信息就地进行分散处理,从而降低系统成本。 本文对智能压力传感器的特点和它的强大数据采集、处理功能进行简要介绍。 特点: (1)传感器的量程和功能都得到了进一步扩展,能实现对基本参数和特殊参数的测量,满足不同场合的需要。 (2)传感器的灵敏度和测量精度也同时得到了提高,对于微弱信号测量,各种信号的校正和补偿都可以实现,测量数据可以根据需要进行存储。 (3)数据测量的稳定性和可能性得到提升,减小外界环境对压力传感
器输出干扰,可以对测量有选择性地进行。 (4)能够实现自我诊断功能,对发生故障的部位能及时且准确地进行锁定,故障状态迅速识别,解决一些通过硬件不能实现的问题。(5)信号输出形式和接口选择更为多样,通信距离得到更大提高。 智能压力传感器的采集和处理数据功能 对传感器输出信号进行预处理,这是传感器智能化之前必须要做的。一般它需要进行以下步骤: (1)收集数据,对所需要的信息汇总,由于一个系统需要检测的数据种类很多,先收集所需要的数据信号。 (2)转换数据,就是把收集到的所需要的信息转换成适用于微处理机使用的方式,原始的输出信号可能是模拟量、数字量或者开关量等,MD转换的输入量并不是只由压力传感器输出信号组成的,还需要电路将传感器输出信号转换成统一的标准信号。 (3)分组数据,对数据有效分组,这种分组通常按系统需要进行的。 (4)组织数据,这样数据更加利于处理,误差也容易修正。 (5)计算数据,这需要用到各种算术和逻辑运算。 (6)存储数据,可以对原始数据和经过计算处理之后的数据进行保存。
数据融合技术概述
数据融合是WSN中非常重要的一项技术,也是目前的一个研究热点,通过一定算法将采集到的数据进行各种网内处理,去除冗余信息,减少数据传输量,降低能耗,延长网络生命周期。本文以从降低传输数据量和能量方面对数据融合方法进行分类,介绍其研究现状。 1.与路由相结合的数据融合 将路由技术和数据融合结合起来,通过在数据转发过程中适当地进行数据融合,减轻网络拥塞,延长网络生存时间[1]。 1.1查询路由中的数据融合 定向扩散(directed diffusion)[2]作为查询路由的代表,数据融合主要是在其数据传播阶段进行,采用抑制副本的方法,对转发过的数据进行缓存,若发现重复数据将不予转发,该方法有很好的能源自适应性,但是他只能在他选择的随机路由上进行数据融合,并不是最优方案。 1.2分层路由中的数据融合 Wendi Rabiner Heinzelman 等提出了在无线传感器网络中使用分簇概念,其将网络分为不同层次的LEACH 算法[3] :通过某种方式周期性随机选举簇头,簇头在无线信道中广播信息,其余节点检测信号 并选择信号最强的簇头加入,从而形成不同的簇。每个簇头在收到本簇成员后进行数据融合处理,并将结果发送给汇集节点。LEACH算法仅强调数据融合的重要性,但未给出具体的融合方法。TEEN是LEACH 算法的改进[4],通过缓存机制抑制不需要转发的数据,进一步减少数据融合过程中的数据亮。
1.3链式路由中的数据融合 Lindsey S 等人在L EACH 的基础上,提出了PEGASIS 算法[5]每个节点通过贪婪算法找到与其最近的邻居并连接,从而整个网络形成一个链,同时设定一个距离Sink 最近的节点为链头节点,它与Sink进行一跳通信。数据总是在某个节点与其邻居之间传输,节点通过多跳方式轮流传输数据到Sink 处,位于链头节点和源节点之间的节点进行融合操作,最终链头节点将结果传送给汇聚节点。链式结构使每个节点发送数据距离几乎最短,比LEACH节能,但增大了数据传送的平均延时,和传输失败率。PEDAP (power efficient data gathering and aggregation protocol) [6]协议进一步发展了PEGASIS 协议,其核心思想是把WSN 的所有节点构造成一棵最小汇集树(minimum spanning tree) 。节点不管在每一轮内接收到多少个来自各子节点的数据包,都将压缩融合为单个数据包,再进行转发,以最小化每轮数据传输的 总能耗。然而,PEDAP 存在难以及时排除死亡节点(非能量耗尽) 的缺点。 2.基于树的数据融合 现有的算法有最短路径树(SPT)、贪婪增量树(GIT)、近源汇集树(CNS)和Steiner树以及他们的改进算法。Zhang [7]提出 DCTC(dynamic convey tree based collaboration) 算法。通过目标附近的节点协同构建动态生成树,协同组节点把测量数据沿确定的生成树向根节点传输,在传输过程中,汇聚节点对其子生成树节点的数 据进行数据融合。Luo [8-9]了MFST (minimum fusion steiner t ree)