一种高精度无刷直流陀螺电机锁相稳速系统
无陀螺捷联惯导系统角速度解算的新方法

相 互促 进 机 制 , 然后 利 用 遗 传 算 法和 数据 拟 合 方 法 得 到 了加 权 因子 的计 算公 式 。仿 真 结 果 表 明 , 现 有 的 解 算 方 与
法相 比 , 权 算 法 解 算 误 差 的 均 值 减 小 了 1 . , 差 减 小 了 两 个数 量 级 。 加 97 方 关 键 词 :无 陀螺 ;智 能 加 权 算 法 ;遗 传 算 法 ;数 据 拟 合 ; 速 度 角
中 图分 类 号 :V 4 . 2 2 1 6 文 献标 志 码 :A
Ne c l u a i g ms o — r e s r p o w a c l tn t o f a u a e o iy i y o c pe f e t a d wn i e ta a i a i n s s e s n r i ln v g to y t m
u i g t e c l u a e i h e a u b an d fo t ep e i u o e t O t e p e i i n o h t g a a u s s n h a c lt d we g t d v l e o t i e r m h r v o sm m n ,S h r cso ft e i e r lv l e i n i r v d a h a et e mp o e t t e s m i .Th r f r ,a wo d r u u u l mp o i g l o f r c so sf r e . Th n t e c l m e eo e n e f l m t a i r v n o p o e ii n i o m d p e h a ~
II T a 。 ZH A O uo r n ,PA N U o G — o g。 Shu ng a
第4章 电气工程技术的应用举例

第4章 电气工程技术的应用举例 4.向更高精度发展的趋势 位置测量元件是闭环控制系统中的重要部件,它的作 用是检测位移并发出反馈信号。一个设计完善的闭环伺服 系统,其定位精度和测量精度主要由检测元件决定,因此 高精度伺服系统对测量元件的质量要求是相当高的。
高,为我们更精确地测量伺服系统的位置、速度等参数提供
了有利条件。
第4章 电气工程技术的应用举例 在雷达扫描线稳定装置中,随着陀螺研制、制造水平 的提高,动力调谐陀螺、液浮陀螺、气浮陀螺、压电陀螺 精度也进一步提高,光纤陀螺、激光陀螺等新型陀螺的使 用,使伺服系统对雷达的稳定精度也有了很大的提高。另 外,如前面所讨论的,现代控制理论中独特技术的应用, 大大提高了雷达的轴角精度和伺服系统的精度。 由于现代化战争的需要,对雷达的灵活性、适应性提 出了更高的要求,比如在运动中的战车、军舰或飞机上要
第4章 电气工程技术的应用举例 4.1.2 雷达伺服系统 1.伺服控制技术发展简况伺服控Leabharlann 技术的发展是和控制理论及控制器件的发展
紧密相连的,功率驱动装置的发展历史就是伺服控制技术 的发展历史。世界上第一个伺服系统是由美国麻省理工学 院辐射实验室于1944年研制成功的火炮自动跟踪目标伺服 系统。这种早期的伺服系统采用交磁电机扩大机——直流 电动机式的驱动方式。由于交磁电机的频率响应差,电动 机转动部分的转动惯量及电气时间常数都比较大,因此响 应速度比较慢。
服系统研制者提供了实现这些控制规律的现实可能性。以计 算机作为控制器、基于现代控制理论的伺服系统,其品质指 标无论是稳态还是动态都相应达到了前所未有的水平,比模 拟伺服系统高得多。计算机之所以能实现这些控制规律是由 于它精度高、运算速度快、存储容量大、输入/输出功能强以 及具有很强的逻辑判断功能。
机电一体化试题及答案汇总
目录机电一体化复习题 (2)机电一体化复习题参考答案 (6)机电一体化技术试题 (11)答案及评分标准 (14)机电一体化复习题 (18)一、名词解释 (18)二、填空题 (19)三、简答题 (20)四、选择题。
(无答案) (23)五、应用题 (24)《机电一体化技术》试卷(一) (27)《机电一体化技术》试卷(一)答案 (29)《机电一体化技术》试卷(二) (31)《机电一体化技术》试卷(二) 答案 (34)《机电一体化技术》试卷(三) (37)《机电一体化技术》试卷(三)答案 (40)《机电一体化技术》试卷(四) (42)《机电一体化技术》试卷(四) 答案 (44)《机电一体化技术》试卷(五) (47)《机电一体化技术》试卷(五) 答案 (49)机电一体化系统设计试题 (53)一、填空题(每空1分,共20分) (53)二、简答题(每题5分,共30分) (53)三、计算题(共20分)(将本题答案写在答题纸上) (54)四、综合分析题(共30分) (54)机电一体化系统设计试题答案 (55)一、填空题(每空1分,共20分) (55)二、简答(每题5分,共30分) (55)三、计算题(共20分) (55)四、综合分析题(30分) (56)机电一体化复习题一、名词解释1机电一体化 2伺服控制 3闭环控制系统 4逆变器 5 SPWM 6单片机 7 I/O 接口8 I/O通道 9 串行通信 10直接存储器存取(DMA)二、判断题:1 在计算机接口技术中I/O通道就是I/O接口。
(×)2 滚珠丝杆不能自锁。
(√)3 无论采用何种控制方案,系统的控制精度总是高于检测装置的精度。
(×)4 异步通信是以字符为传输信息单位。
(√)5 同步通信常用于并行通信。
(×)6 无条件I/O方式常用于中断控制中。
(×)7从影响螺旋传动的因素看,判断下述观点的正确或错误(1)影响传动精度的主要是螺距误差、中径误差、牙型半角误差(√)(2)螺杆轴向窜动误差是影响传动精度的因素(√)(3)螺杆轴线方向与移动件的运动方向不平行而形成的误差是影响传动精度的因素(√)(4)温度误差是影响传动精度的因素(√)三、单项选择题1. 步进电动机,又称电脉冲马达,是通过( B )决定转角位移的一种伺服电动机。
高精度光纤陀螺光源强度噪声的抑制

1 光源强度噪声对光纤陀螺性能的影响
高精度光纤陀螺一般采用宽带掺铒光纤光源,其主要噪声由热噪声、散粒噪声和光源强度噪声构成,可用下式表示[4]:
收稿日期:2010-06-26;修回日期:2010-10-25 基金项目:国家自然科学基金资助项目(60604019) 作者简介:李绪友(1964—),男,教授,博士生导师,主要从事光纤陀螺及光纤陀螺捷联惯导系统的研究。
602
中国惯性技术学报
第 18 卷
V
(t )
=
1 2
A1K1
( I0∆Φ
+
IN
(t
+τ
))
(9)
由于数字闭环光纤陀螺采用的是方波调制,光强信号是一个频率为陀螺偏置频率的方波信号,相位解调器是从光强
信号前后两个半周期的光强差中解调出陀螺旋转角速度信息,因此,陀螺的旋转角速度信息主要包含在方波信号频率及
SNR =
i
⎛ ⎜ ⎝
2e
+
i ∆ν
⎞ ⎟ ⎠
B
(3)
由式(3)可知,在光功率较小( i < 2e∆ν )时,光纤陀螺信噪比由散粒噪声决定。当入射到探测器上的光功率增
加到一定程度( i > 2e∆ν )后,陀螺信噪比将由光源强度噪声决定,继续提高光源光功率,光纤陀螺信噪比保持不变,
随机游走系数也就不能得到降低。为了进一步降低陀螺随机游走系数,提高陀螺精度,必须采取措施抑制光源强度噪声。
第 18 卷第 5 期 2010 年 10 月
文章编号:1005-6734(2010)05-0600-04
中国惯性技术学报 Journal of Chinese Inertial Technology
基于旋转调制技术的自动陀螺寻北仪方案设计
掘等 方位测 量等 民用 领域 中必 要 的测 量 手段 。 寻 北 仪 目前 普 遍 采 用 多 位 置 寻 北 法 …, 即 在
0 ~3 0 。 6 。范 围 内的等 间隔 的位 置 上采 样 陀 螺仪 的 输 出数 据 ,进 行 方位 角 解 算 的方 法 。它 在 一 定程 度
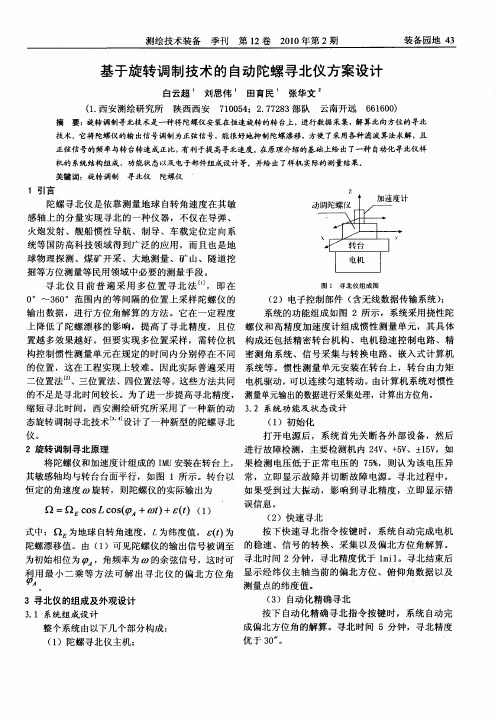
图 1 寻 北 仪 组 成 图
o
3寻 北仪 的组成 及 外观设 计
3 1 系统组 成设 计 .
( ) 自动化 精 确寻 北 3
按 下 自动化 精 确 寻 北指 令 按键 时 ,系 统 自动 完 成偏 北 方位 角 的解算 。寻 北 时 间 5 分钟 ,寻 北精度
优 于 3 O。
整个 系统 由 以下 几个 部分 构成 :
要 : 转调 制寻 北技 术是 一种将 陀螺仪安装在 恒速旋转 的转 台上 ,进行数据采集,解 算北向 方位 的寻北 旋
技术 它将 陀螺仪的输 出信号调制为正弦信 号,能很好地抑制 陀螺漂移 ,方便 了采用各种滤 波算 法求解 ,且 正弦信号的频率与转台转速 成正比, 利于提 高寻北速度 。 有 在原理介 绍的基础上给 出了一种 自动化寻北仪样
误信 息 。 ( )快速 寻 北 2
Q =Q C S o ( f+c t ( ) O Lc se + ) () 1
式中:Q 为地球 自转角速度 ,£为纬度值 , ( 为 f )
按 下 快 速 寻 北指 令 按 键 时 ,系 统 自动 完 成 电机
陀螺漂 移值 。 由 ( )可 见 陀螺仪 的输 出信 号被 调至 的稳 速 、信 号 的转 换 、采 集 以及 偏 北 方位 角 解算 。 1 m1 为初始 相位 为 ,角频 率为 C O的余 弦信 号 ,这 时可 寻北 时 间 2分钟 ,寻 北精 度优 于 l i 。寻 北结束 后 用 最 小 二 乘 等 方 法 可 解 出 寻 北 仪 的 偏 北 方 位 角 显 示 经 纬 仪主 轴 当前 的偏 北方 位 、俯仰 角 数据 以及 测 量 点的 纬度值 。
重复控制在陀螺性能测试仪控制系统中的应用

f 一T T L
输出 , 将这 一信 号 的模 型 设置 在稳 定 的闭环 系统 中 , 则 反馈 系 统 可 实 现 对 此 信 号 的 完 全 跟 踪 和 抑 制 ” 。 即在 系统 内部设 置 一 个 周期 信 号 发生 器 , 其输 入 信 号经过 时滞 环节 后 , 被延 迟一 个信 号周 期 , 迟 后 的 延 信 号通 过反 馈 又 作 用 于 下 一 个 周 期 , 断 循 环 ,经 不 过几个 周期 的重 复 控 制 后 , 制 周 期 性 干 扰将 跟 随 抑 误 差控 制在 要求 的范 围之 内, 样 就 可 以 大 大提 高 这 系统 的跟 踪精度 。但 重 复控制 也使 系统 的稳 定性 变
重 复控制 在 陀螺 性 能 测试 仪 控 制 系统 中的 应 用*
李军 生
( 宝鸡 文 理 学 院 电 气 系 ,陕 西 宝 鸡 7 11 ) 2 0 6
摘 要 : 对航 空 陀 螺 性 能 测 试 仪 长 期 存 在 的 问题 , 绍 了一 种 基 于重 复 控 制 和 数 字 信 号 处理 器 针 介
左、 右摇 摆 的功 能 。 由于 系统 的性 能受 电子 元 器 件 参 数制 约影 响较 大 , 电位 器 多 , 试 工 作 量 大 , 使 调 致
的实 时运 算 能力 , 富 的电 动机 控 制 外 围 电路 和 接 丰 口资 源 , 以光 电编码 器 和 电流变 换器 为转 速 、 电流 的
T MS 2 L 2 1 3 O F 8 2作 为主控 芯 片 , 分利 用 它 所 具 有 充
大 , 速 时速度 测 量 信 号 太 小 , 制 精 度 、 定 精 度 低 控 稳
应用于运动平台光电跟瞄系统的惯性参考单元研究综述
第 32 卷第 3 期2024 年 2 月Vol.32 No.3Feb. 2024光学精密工程Optics and Precision Engineering应用于运动平台光电跟瞄系统的惯性参考单元研究综述李醒飞1,2,何梦洁1,拓卫晓1,2*,王天宇1,韩佳欣1,王信用1(1.天津大学精密测试技术及仪器国家重点实验室,天津 300072;2.深海技术科学太湖实验室,江苏无锡 214000)摘要:目标的变化和任务的拓展对光电跟瞄系统提出了快速机动的要求,从地基平台到车载、船载、机载、星载等运动平台是光电跟瞄系统的重要发展趋势。
基于惯性参考单元(Inertial Reference Unit,IRU)的视轴稳定方式是克服运动平台高频扰动,实现光电跟瞄系统微弧度甚至亚微弧度级跟瞄的主要技术手段。
针对运动平台光电跟瞄系统精确指向对载体基座扰动抑制的需求,分析和对比了IRU的各种技术方案,特别介绍了利用低噪声、宽频带惯性传感器敏感角扰动,并通过反馈控制实现视轴惯性稳定的系统方案。
从此类IRU系统的工作原理出发,阐述了系统的两种工作模式及功能特点,建立了系统数学模型。
然后,介绍了IRU的国内外研究进展及发展方向,指出惯性传感、支承结构和控制系统是决定IRU稳定能力的关键因素,梳理了三项关键技术的研究动态。
最后,总结了IRU的空间应用情况,并结合目前的应用需求对其未来应用领域进行了探讨。
关键词:惯性参考单元;运动平台;光电跟瞄系统;视轴稳定;扰动抑制中图分类号:V19 文献标识码:A doi:10.37188/OPE.20243203.0401Review on inertial reference unit applied to photoelectric tracking and pointing system of moving platform LI Xingfei1,2,HE Mengjie1,TUO Weixiao1,2*,WANG Tianyu1,HAN Jiaxin1,WANG Xinyong1(1.State Key Laboratory of Precision Measurement Technology and Instruments, Tianjin University,Tianjin 300072, China;2.Taihu Laboratory of Deepsea Technological Science, Wuxi 214000, China)* Corresponding author, E-mail: tuoweixiao@Abstract: The evolution of objectives and the broadening of tasks have heightened the need for swift ma⁃neuverability in the photoelectric tracking and pointing system. Shifting from ground⁃based to diverse mo⁃bile platforms such as vehicles, ships, aircraft, and spacecraft marks a significant trend in the development of photoelectric tracking and pointing systems. The stabilization of the line of sight using an inertial refer⁃ence unit (IRU) is essential to counteract the high⁃frequency disturbances encountered on these mobile plat⁃forms, enabling the system to achieve tracking accuracy at the micro⁃radian or even sub⁃micro⁃radian level. 文章编号1004-924X(2024)03-0401-21收稿日期:2023-06-30;修订日期:2020-08-10.基金项目:国家自然科学基金资助项目(No.62203322);中国博士后科学基金资助项目(No.2022M712372);深海技术科学太湖实验室“揭榜挂帅”项目资助项目(No.2022JBGS03001)第 32 卷光学精密工程This paper delves into various IRU implementation strategies to mitigate disturbances from the carriers, ensuring precise aiming of the photoelectric tracking and pointing system on moving platforms. It highlights a system design that employs low noise and wideband inertial sensors for angle disturbance detection and achieves line of sight stabilization via feedback control. The document details the system's operational modes, functional features, constructs its mathematical model, and reviews both domestic and internation⁃al research advancements and future directions in IRU technology. It emphasizes that inertial sensing, sup⁃port structures, and control systems are critical to IRU's stabilization performance, and it organizes the lat⁃est research trends in these three vital areas. Conclusively, the paper outlines the spaceborne applications of IRU and explores potential future application domains, considering current demands.Key words: inertial reference unit;moving platform;photoelectric tracking and targeting system;line-of-sight stabilization; disturbance suppression1 引言在天文观测[1]、激光通信[2]和量子通信[3]等领域,目标的变化和任务拓展对光电跟瞄系统提出了快速机动的要求,从地基平台到车载、船载、机载、星载等运动平台拓展是光电跟瞄系统的重要发展趋势。
运动控制系统-Sigmatek
730
V DC
690
V DC
800
kW
21
V DC
850
V DC
810
V DC
900
kW
27
MDP 102-1
1-phase 115 – 230 V AC 2 2 150 – 360 450 22 – 30 max. 50 30 23 to 26 (取决于刹车类型)
540
420 400 450 5.3
高效的工具 工程通过诸如简化事实数据分析仪, 实时趋势记录,计算机辅助制造设 计,运动诊断视图等高效的工具。初 始启动和诊断时间从而大大减少。
完美的VARAN和以太网总线通讯
现代系统结构启用了硬件实时可用的 VARAN以太网总线。用于驱动之间的 通信和控制。运动的精确性也随之增 加。
通过VARAN的简短访问时间和高同步 性,实现复杂事件配置文件的控制和
简单的初始启动
驱动器中所有的参数,配置数据全部 保存在控制系统中,初始的维护和启 动很简单。更换驱动器之后参数和配 置数据自动加载。
经济
DIAS的功能是智能减少。在电流,速 度和位置控制下,虽然控制接管了应 用程序任务,但他们仍专注于他们的 实际任务。冗余的功能和昂贵的电子 元件在驱动器中被取消了。一个中间 电路来确保节能。
ST 151 1 +18 – 55 V DC max. 5 A
步进马达 增量式编码器 STO 25 x 104 x 72 mm
步进电机 1 +18 – 70 V DC 3.5 – 10 A (取决于操作模式) 5 – 10 A (取决于操作模式) 步进电机 Incremental encoder input 26 x 151 x 121 mm
电子电气设备标准精选(最新)
电子电气设备标准精选(最新)《GJB/Z35-1993 元器件降额准则》GJ69《GJB69A-1997 舰用电机通用规范》GJ72A《GJB72A-2002 电磁干扰和电磁兼容性:术语》GJ74《GJB74A-1998 军用地面雷达通用规范》GJ89《GJB/Z89-1997 电路容差分析指南》GJ94《GJB/Z94-1997 军用电气安全设计手册》GJ108A《GJB/Z 108A-2006 电子设备非工作状态可靠性预计手册》GJ150.1《GJB/Z 150.1-2007 Z 军用电子设备安全设计指南 第1部分:电击防护》GJ150.5Z《GJB/Z150.5-2011 军用电子设备安全设计指南第5部分:辐射防护》GJ158Z《GJB/Z158-2011 Z 军用装备电磁材料电磁屏蔽性能数据手册》GJ223《GJB/Z223-2005 K 最坏情况电路分析指南》GJ271A《GJB271A-1999 控制电机包装规范》GJ299C《GJB/Z 299C-2006 电子设备可靠性预计手册》GJ319B《GJB 319B-2012 通信用电池品种系列》GJ360B《GJB360B-2009 电子及电气元件试验方法》GJ361A《GJB361A-1997 控制电机通用规范》GJ546B《GJB 546B-2011 Z 电子元器件质量保证大纲》GJ548B《GJB 548B-2005 微电子器件试验方法和程序》GJ597B《GJB 597B-2012 半导体集成电路通用规范》GJ686A《GJB686A-2004 航空电机用电刷规范》GJ783B《GJB783B-2011 Z 驱动微电机通用规范》GJ787A《GJB787A-1999 交流伺服电动机通用规范》GJ788A《GJB788A-1999 自整角机通用规范》GJ788/1《GJB788/1-2000 J36ZK系列控制式自整角机详细规范》GJ788/1K《GJB 788/1-2006 K J45ZLF系列力矩式自整角发送机规范》GJ788/2K《GJB 788/2-2006 K J45ZKF系列控制式自整角发送机规范》GJ789A《GJB789A-1999 磁滞同步电动机通用规范》GJ812K《GJB812A-2007 K 舰用三相异步电动机通用规范》GJ971A《GJB971A-1999 永磁式直流力矩电动机通用规范》GJ1195A《GJB1195A-2008 Z 速率陀螺仪通用规范》GJ1320《GJB 1320.1~4-1991 舰船用交流电动机起动器》GJ1402A《GJB1402A-1997 交流伺服测速机组通用规范》GJ1641《GJB1641-1993 装甲车辆用直流电动机通用规范》GJ1642《GJB1642-1993 自整角伺服力矩机通用规范》GJ1643《GJB1643-1993 鱼雷用中频发电机及整流器通用规范》GJ1653《GJB1653-1993 电子和电气设备、附件及备件包装规范》GJ1780A《GJB1780A-2005 K 印制绕组直流伺服电动机通用规范》GJ1781A《GJB1781A-2008 K 电机扩大机通用规范》GJ1786《GJB1786-1993 无槽电枢直流伺服电动机通用规范》GJ1799《GJB1799-1993 大规模集成电路用磷扩散源化学分析方法》GJ2082A《GJB 2082A-2012 电子设备工艺缺陷和机械缺陷分类》GJ2438A《GJB 2438A-2002 混合集成电路通用规范》GJ2440A《GJB2440A-2006 Z 混合集成电路外壳通用规范》GJ2441A《GJB2441A-2012 Z 步进电动机通用规范》GJ2649《GJB2649A-2011 Z 军用电子元件失效率抽样方案和程序》GJ2821《GJB2821-1997 直流伺服电动机通用规范》GJ2822《GJB2822-1997 有限转角力矩电动机通用规范》GJ2825《GJB 2825-1997 军用雷达机柜、插箱、插件模块化要求》GJ2830《GJB2830-1997 挠性和刚性印制板设计要求》GJ2835《GJB2835-1997 微电路包装规范》GJ3146《GJB3146-1998 稳速直流电动机通用规范》GJ3163《GJB3163-1998 微型异步电动机通用规范》GJ3233《GJB3233-1998半导体集成电路失效分析程序和方法》GJ3513《GJB3513-1999 无刷稳速直流电动机通用规范》GJ3947A《GJB3947A-2009 Z 军用电子测试设备通用规范》GJ4057《GJB4057-2000 军用电子设备印制板电路板设计要求》GJ4155《GJB4155-2001 J90LWX系列无刷直流力矩电动机规范》GJ4156《GJB4156-2001 控制电机装置通用规范》GJ4205《GJB 4205-2001 通用电子对抗装备设计定型文件编写规定》GJ4326《GJB 4326-2002 鱼雷直流推进电机规范》GJ4346《GJB4346-2002 电子对抗装备维修技术资料编写导则》GJ4473《GJB 4473-2002 军用通信电源及其环境集中监控系统技术要求》GJ4538《GJB 4538-2002 军用开关型大功率直流试验电源规范》GJ4869《GJB 4869-2003 航空起动电动机通用规范》GJ5157《GJB 5157-2002 小功率数字伺服系统性能试验方法》GJ5172《GJB 5172-2003 K 遥测中心程序控制器通用规范》GJ5176《GJB5176-2004 Z 军用文电处理系统通用要求》GJ5188《GJB5188-2004 电子对抗装备仓库储存与供应要求》GJ5200Z《GJB5200-2004 Z 紫外告警设备通用规范》GJ5248《GJB5248-2004 无刷直流电动机驱动器通用规范》GJ5447Z《GJB5447-2005 Z 光电对抗显控台通用规范》GJ5448Z《GJB5448-2005 Z 光电对抗指挥控制设备通用规范》GJ5504《GJB5504-2005 K 舰船电机绝缘用H级无溶剂浸渍树脂规范》GJ5588《GJB5588-2006 Z 线性机电驱动器通用规范》GJ5871K《GJB 5871-2006 K 航空电机用耐高温无溶剂绝缘漆规范》GJ5936Z《GJB5936-2007 Z 军用电子装备自动测试设备接口》GJ5937K《GJB 5937-2007 军用电子装备自动测试系统通用要求》GJ5938K《GJB 5938-2007 军用电子装备测试程序集通用要求》GJ5968《GJB 5968-2007 电荷耦合成像器件通用规范》GJ5994K《GJB5994-2007 K 舰船电机绝缘用聚酰亚胺薄膜聚芳酰胺纤维纸柔软复合材料制品规范》GJ6083Z《GJB6083-2007 Z 电子对抗装备随机文件要求》GJ6084Z《GJB6084-2007 Z 雷达对抗数字化接收机通用规范》GJ6085Z《GJB6085-2007 Z 雷达对抗多波束测向设备通用规范》GJ6086Z《GJB6086-2007 Z 雷达对抗数字式重频跟踪器通用规范》GJ6090Z《GJB6090-2007 Z 机载雷达对抗侦察设备定型试验规程》GJ6091Z《GJB6091-2007 Z 弹道导弹导引雷达抗干扰内场仿真试验方法》GJ6092.1Z《GJB6092.1-2007 Z 地面光电无源干扰设备试验场试验方法:烟幕的红外遮蔽性能》GJ6092.2Z《GJB6092.2-2007 Z 地面光电无源干扰设备试验场试验方法第:烟幕的激光遮蔽性能》GJ6093Z《GJB6093-2007 Z 弹道导弹电子攻防对抗系统雷达有源干扰对抗效果评定准则》GJ6294Z《GJB6294-2008 Z 军用电子探空仪通用规范》GJ6367Z《GJB6367-2008 Z 纳秒级分压器和电流线圈的方波标校方法》GJ6784Z《GJB6784-2009 Z 军用地面电子设施防雷通用要求》GJ6785Z《GJB6785-2009 Z 军用电子设备方舱屏蔽效能测试方法》GJ6793Z《GJB6793-2009 Z 军用电子分类表编制规则》GJ6919Z《GJB6919-2009 Z 导电纤维丝束性能测试评价方法》GJ6927Z《GJB6927-2009 Z 军用电子测试仪器验收程序和要求》GJ7179Z《GJB7179-2011 高速网络圆形电连接器通用要求》GJ7243Z《GJB7243-2011 Z 军用电子元器件筛选技术要求》GJ7246Z《GJB7246-2011 Z 小型无刷直流风机通用规范》GJ7270Z《GJB7270-2011 军用热收缩电绝缘套管通用规范》GJ7322Z《GJB7322-2011 军用通信设备配套电池使用与维护要求》QJ3103A《QJ3103A-2011 印制电路板设计要求》SJ20660《SJ 20660-1998 地面对空警戒雷达通用规范》SJ20683《SJ 20683-1998 相控阵雷达T/R组件数字式波束控制器模块通用规范》SJ20684《SJ 20684-1998 情报雷达图象传输设备发受端模块组通用规范》SJ20689《SJ 20689-1998 战术数字接力机通用规范》SJ20690《SJ 20690-1998 短波战术接收机通用规范》SJ20691《SJ 20691-1998 短波三信测向接收机通用规范》SJ20692《SJ 20692-1998 炮兵阵地通信指挥系统无线电台通用规范》SJ20694《SJ 20694-1998 地面雷达维修性设计指南》SJ20695《SJ 20695-1998 地面雷达测试性设计指南》SJ20696《SJ 20696-1998 雷达标定仪通用规范》SJ20701《SJ 20701.1~.6-1998 合成集团军野战电子系统互连互通》SJ20774《SJ20774-2000 地面统一S频段测控系统通用规范》SJ20791《SJ20791-2000 微通道板光电倍增管总规范》SJ20792《SJ20792-2000 微通道板光电倍增管测试方法》SJ20793《SJ20793-2000 军用激光测距仪通用规范》SJ20835《SJ20835-2002 战场侦察雷达修理规范》SJ20836《SJ20836-2002 雷达方舱简易牵引轮通用规范》SJ20887《SJ 20887-2003 星箭靶场用初始段测量雷达通用规范》SJ20888《SJ 20888-2003 地面阻塞式GPS干扰机通用规范》SJ20889《SJ 20889-2003 战场频谱管理信息交换格式》SJ20924《SJ20924-2005 保密通信与信息安全设备结构设计要求》SJ20925《SJ20925-2005 军用低泄漏方舱通用规范》SJ20926《SJ20926-2005 军用车内局域网通用规范》SJ20929《SJ20929-2005 高方向定向耦合器通用规范》 SJ20930《SJ20930-2005 直读式极化衰减器通用规范》 SJ20931《SJ20931-2005 微波信号发生器通用规范》SJ20951《SJ 20951-2005 通用数据加密模块接口要求》。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第13卷第4期 中国惯性技术学报 2005年8月 文章编号:1005-6734(2005)04-0043-04
一种高精度无刷直流陀螺电机锁相稳速系统 马 隽,孙纯祥 (航天时代电子公司第十六研究所,西安 710100)
摘要:设计了一种两相无位置传感器无刷直流陀螺电机锁相稳速系统,单片机与可编程逻辑器的结合使系统以简单的电路实现了各种数字信号的处理。锁定时,电机反电势频率脉冲跟踪基准脉冲,电机稳速运行。试验表明:该系统稳速精度高,实用性强,可靠性高。 关 键 词:无刷直流陀螺电机;逻辑编程;锁相环;高精度 中图分类号:U666.1 文献标识码:A
Phase-locked Constant-speed System of a High-accuracy Brushless DC Gyro Motor
MA Juan, SUN Chun-xiang (The 16th Institute, China Aerospace Times Electronics Corporation, Xi’an 710100, China)
Abstract: A phase-locked steady-speed system of two-phase sensorless brushless DC gyro motor is designed. It can combine with single-chip microcomputer and programmable logic controller to realize the processing of digital signals using simple electronics. In phase-locked state, the phase pulse of motor tracks the basis pulse and the motor runs at steady-speed. Experiment shows that the system is practical, reliable and high accuracy. Key word: brushless DC gyro motor; logic program; phase-locked loop; high accuracy
0 引 言 近年来,采用电子换相原理工作的无刷直流电动机(BLDC motor)越来越广泛地应用于高精度陀螺仪的驱动。传统的BLDC中转子位置传感器使电机的结构变得复杂,因此,在无刷直流陀螺电机中,应用了无转子位置传感器控制的技术,利用反电势检测电路取代传感器,以提高电路和控制复杂性来降低电机的复杂性[1][2]。同时,为满足陀螺电机对转速稳定度的特殊要求,需要应用锁相环技术。锁相环技术本来用于通信系统,它是一种能够实现跟踪输入信号相位的闭环自动控制系统。数字信号同步功能使锁相环(PLL)技术在其它一些需要高精度频率信号的领域得到了推广应用,PLL在电机高精度速度控制中的应用就是一个成功的例子。 本文以两相无刷直流陀螺电机为样机,设计了一种简单实用的无位置传感器BLDCM锁相稳速控制系统,解决了反电势信号检测、起动及系统保护等问题。单片机和可编程逻辑器件的合理配合使用简化了系统结构,提高了系统实用性。实验表明,该控制系统起动迅速,可靠性好,稳速精度高。
收稿日期:2005-05-14 作者简介:马隽(1978—),男,硕士,专业为精密仪器及机械,研究方向为电机及其控制。 44 中国惯性技术学报 2005年8月 1 系统硬件结构及原理 1.1 系统总体结构及原理 考虑到无刷直流陀螺电机体积小、转动惯量大、运行速度高的特点,本文设计了一种线路简单、可靠性高的锁相稳速电路。陀螺电机转子采用钐钴永磁作磁极,定子绕组采用两相绕组形式,按两相四状态的控制方式工作,逆变器采用带起动限流的双H桥形式[3]。系统结构如图1所示。 电机起动时,转子位置检测电路输出无效,由单片机提供频率逐渐递增的外同步信号,经逻辑处理控制逆变器开关管的导通与截至。同时,频相比较电路处于鉴频工作状态,使电机获得较大的激磁电流,以便顺利起动。当转子达到预定转速时,系统由外同步起动状态切换到内同步反电势控制运行状态,然后加速转子至同步转速,并锁定在同步转速下运行。系统闭环稳速时的调节过程是:当电机转速发生改变时,利用单片机及可编程逻辑器将转子位置信号生成四倍频信号FV(4fv)作为转速(频率)反馈信号。把这一信号与晶振分频产生的基准频率信号FR(4fr)在频相比较器中进行比较,输出一个反映两者相位差的脉冲信号作为脉宽调制信号。此信号经与转子位置信号进行逻辑合成,生成逆变器开关信号,控制电机加速或减速,使电机转速频率严格跟踪基准频率。
1.2 转子位置检测电路 由于无刷直流陀螺电机没有安装转子位置传感器,为获得准确的位置信号,可通过检测电机端电压中包含的反电势得到。位置检测一相原理电路图如图2所示,其中运放及电阻、电容组成二阶有源低通滤波器;电压比较器与电阻组成过零检测电路,将反电势波形变成方波,从而实现转子位置检测。
1.3 信号处理电路 系统中,单片机控制电路、逻辑合成电路、频相比较电路的功能是对各种控制信号、位置信号进行处理以生成功率管开关控制信号,在本系统中总称为信号处理电路。电路原理图如图3所示,信号处理电路与系统其它电路的接口经光耦隔离以提高系统的可靠性。
反电势检测单片机控制电路 逻辑合成 电 路 频相比较电路双H桥逆变器 光电隔离陀螺电机光电隔离晶振分频器保护/隔离电 路
图1 控制系统原理框图
R1R2C1R3C2R4R6C3R51KC4+15 V542312U2A1/4 LM139+15VR7R8OPT1R9+5VHAXUaUx32
1
4
11
U1A
1/4 LM148
567
U1B
1/4 LM148
图2 转子位置检测原理电路图
PAXNCPBYC11RST1P3.0(RXD)2P3.1((TXD)3XTAL24XTAL15P3.2(INT0)6P3.3(INT1)7P3.4(T0)8P3.5(T1)9GND10P3.711P1.012P1.113P1.214P1.315P1.416P1.517P1.618P1.719VCC20U3AT89C2051PMC10CRLR19INT0INT14FVC9HAXHBYOCNCNCHAXHBYPWMR1D12V3Pu4Uf5U26GND7c8b9Df10Pd11D212U113Vcc14U5MC40444fR+5SASXSBSYSASXSBSYVCC20IO719IO618IO416IO517IO315IO214IO113IO012IN9/OE11GND10IN89IN78IN67IN56IN45IN34IN23IN12IN0/CLK1U4
GAL16V8
图3 信号处理电路原理图 第4期 马隽等:一种高精度无刷直流陀螺电机锁相稳速系统 45 信号处理电路是本控制系统的核心,主要控制器件包括AT89C2051PM单片机、可编程逻辑器GAL16V8和频相比较器MC4044。 AT89C2051PM单片机是一种带有2KBFlash可编程、可擦除只读存储器(EEPROM)的低压、高性能8位微型计算机。系统中,单片机为上电复位方式,时钟采用11.0592 MHz石英晶振。通过编程实现电机工作状态判别、电机初始定位、电机外同步变频起动、外同步起动向内同步闭环运行切换、相位判别以及相位延时等工作。单片机的应用使控制电路与由分离元件构成的电路相比大为简化。 逻辑合成电路应用可编程逻辑器GAL16V8对位置信号(HA、HB)、位置延时信号(PA、PB)、脉宽调制信号(PWM)、过流信号(OC)等进行逻辑合成,生成单片机外部中断信号(INT0、INT1) 、四倍频位置信号(4fv)及四路功率开关管动作信号(SA、SX、SB、SY)。 频相比较电路利用了鉴频鉴相器MC4044的九门比较器。由于电机转速的反馈信号总是滞后基准时钟信号,故输出只用U1端即可。频相比较器能获得良好的相位捕捉性能,其工作方式为:四倍频转速(频率)反馈信号4fv与晶振分频后得到的基准信号4fr在九门比较器进行比较,从U1端输出与fv和fr频率差、相位差相关的脉宽调制信号[4]。
2 可编程逻辑器编程及控制波形 本文从实用性的角度出发,充分利用单片机和可编程逻辑器件的功能,实现了对各种信号的综合处理。其中,可编程逻辑器GAL16V8使用ABEL-HDL语言进行编程如下: module bldcm10 title 'basic logic gate Juan.Ma 2004.10' name device 'p16v8s'; HAX,HBY,PAX,PBY,PWM,OC Pin 3,4,5,6,8,9; OE,FV,INT0,INT1,SY,SB,SX,SA Pin 11,12,13,14,15,16,17,18,19; X=.X.; equations NT0=HAX&!HBY#!HAX&HBY; INT1=HAX&HBY#HAX&HBY; FV=!HAX&HBY&PAX&PBY#!HAX&!HBY&!PAX&PBY# HAX&!HBY&!PAX&!PBY#HAX&HBY&PAX&!PBY; SA=PAX&!PBY&OC&!PWM; SX=!PAX&PBY&OC&!PWM; SB=PAX&PBY&OC&!PWM; SY=!PAX&!PBY&OC&!PWM; end bldcm10 锁相稳速控制,保护不动作(OC=1)时,信号处理电路各点波形如图4所示,其中HAX、HBY为转子位置信号,PA、PB为位置延时信号,PWM为脉宽调制信号,INT0、INT1为单片机外部中断信号,FV(4fv)为四倍频位置信号,SA、SX、SB、SY为功率开关管动作信号。
HAXHBYPAXPBYINT0INT1FV(4fv)
PWMSASBSXSY
090180270360450540630720FR(4fr)0 90 180 270 360 450 540 630 720
HAXHBYPAXPBYINT0INT1FV(4fv)FR(4fr)PWMSASBSXSY
图4 控制波形图