数据4-经纬仪矩形
利用极坐标的方式按ABCD顺序用直线命令绘制矩形
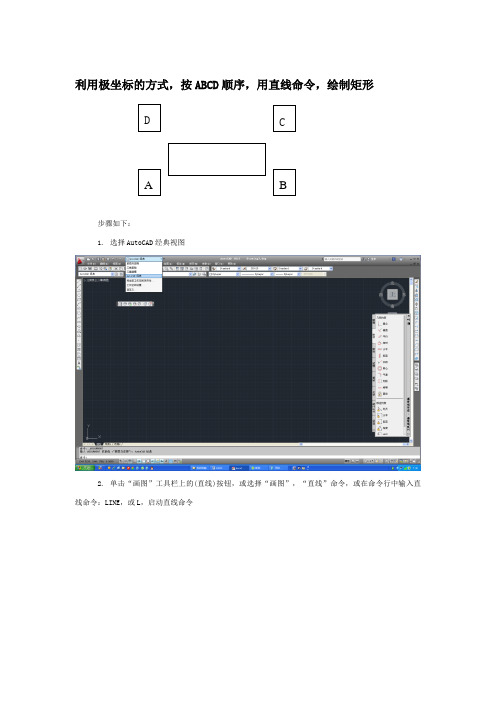
利用极坐标的方式,按ABCD 顺序,用直线命令,绘制矩形
步骤如下:
1. 选择AutoCAD 经典视图
2. 单击“画图”工具栏上的(直线)按钮,或选择“画图”,“直线”命令,或在命令行中输入直线命令:LINE ,或L ,启动直线命令 A B
C D
在AutoCAD命令行上提示:指定第一点时,在画图区域单击光标左健,拾取一点,确信直线段的起始点。
3.在AutoCAD提示:指定下一点或[舍弃(U)]时,输入B点,相关于A点的坐标(@1000,0)
4.在AutoCAD提示:指定下一点或[舍弃(U)]时,输入C点相对的坐标(@0,200)
5.在AutoCAD提示:指定下一点或[[闭合(C)/舍弃(U)]时,输入D点相对于的点的C坐标(@-1000,0)
6.在AutoCAD提示:指定下一点或[[闭合(C)/舍弃(U)]时,输入C,封锁图形。
wAAA第四章 经纬仪及角度测量

对中
交替
整平
瞄
读
准
数
一、对中、整平
目的: ① 使测点中心与仪器竖轴中心在同一铅垂线上; ② 使水平度盘处于水平位置。
方法:有垂球对中和光学对点器对中两种,由于 垂球对中精度较低,且使用不便,工程测量 中一般采用光学对点器对中。
光学对点器对中及整平的步骤: ①安置仪器:高度适中,使测点在视场内; ②强制对中:调节脚螺旋,使光学对点器中心
B 18 46 48 198 46 36 +12 18 46 42 288 45 50
C 90 01 00 270 00 36 +24 90 00 48
Δ
-6
-12
竖直角观测
竖直度盘构造 竖直角观测与计算 竖盘读数指标差
一、竖直度盘构造
竖直度盘固定在望远镜的旋转轴(横轴)上。 主要由竖直度盘、竖盘指标、(竖盘指标水准管、 竖盘指标水准管微动螺旋),目前很多仪器用自动补偿 器代替了水准管。
②盘右(倒镜)观测 瞄N, 记录 n右= 248°42′30″ 瞄M, 记录 m右= 180°00′24″ 下半测回角值: β右= n右- m右= 68°42′06″
③检核 对于DJ6经纬仪,上下半测回角度之差应满足:
左右40, 否则,应重测。
④一测回角值
左右68 4209
2
当测角精度要求较高时,需观测多个测回: ① 第一测回度盘归零; ②其他各测回间按180˚/n(n为测回数)的差
二. 方位角和象限角
1. 方位角
从标准方向的北端起,顺时针转至某一直线 的水平夹角,称为该直线的方位角。
常用A下标或下标 表示,角值为0°~360°。
N(北)
D
A
经纬仪及水准仪的使用方法及图示讲解

经纬仪的用法1、HR—右旋(顺时针)水平角,HL—左旋(逆时针)水平角。
2、经纬仪的操作步骤(光学对中法)1 、架设仪器:将经纬仪放置在架头上,使架头大致水平,旋紧连接螺旋。
2 、对中:目的是使仪器中心与测站点位于同一铅垂线上。
可以移动脚架、旋转脚螺旋使对中标志准确对准测站点的中心。
3 、整平:目的是使仪器竖轴铅垂,水平度盘水平。
根据水平角的定义,是两条方向线的夹角在水平面上的投影,所以水平度盘一定要水平。
粗平:伸缩脚架腿,使圆水准气泡居中。
检查并精确对中:检查对中标志是否偏离地面点。
如果偏离了,旋松三角架上的连接螺旋,平移仪器基座使对中标志准确对准测站点的中心,拧紧连接螺旋。
精平:旋转脚螺旋,使管水准气泡居中。
4 、瞄准与读数:①目镜对光:目镜调焦使十字丝清晰。
②瞄准和物镜对光:粗瞄目标,物镜调焦使目标清晰。
注意消除视差。
精瞄目标。
③读数:调整照明反光镜,使读数窗亮度适中,旋转读数显微镜的目镜使刻划线清晰,然后读数。
现在很多都是使用全站仪,全站仪的使用(以拓普康全站仪为例进行介绍)介绍:(1)测量前的准备工作1)电池的安装(注意:测量前电池需充足电)①把电池盒底部的导块插入装电池的导孔。
②按电池盒的顶部直至听到“咔嚓”响声。
③向下按解锁钮,取出电池。
2)仪器的安置。
①在实验场地上选择一点,作为测站,另外两点作为观测点。
②将全站仪安置于点,对中、整平。
③在两点分别安置棱镜。
3)竖直度盘和水平度盘指标的设置。
①竖直度盘指标设置。
松开竖直度盘制动钮,将望远镜纵转一周(望远镜处于盘左,当物镜穿过水平面时),竖直度盘指标即已设置。
随即听见一声鸣响,并显示出竖直角。
②水平度盘指标设置。
松开水平制动螺旋,旋转照准部360,水平度盘指标即自动设置。
随即一声鸣响,同时显示水平角。
至此,竖直度盘和水平度盘指标已设置完毕。
注意:每当打开仪器电源时,必须重新设置和的指标。
4)调焦与照准目标。
操作步骤与一般经纬仪相同,注意消除视差。
第四章经纬仪和角度测量精品PPT课件

觇牌。 与点位在同一铅垂
线上。
三、水平角观测方法
1、测回法 对中整平后 盘左,瞄A,置数(略大
于零0°00′12″); 瞄A、B,读数; β左=b左-a左 盘右,瞄B、A,读数。 β右=b右-a右 β左β右相差不超过40 ″。
β= b - a
0
270
90
180
水平度盘
a A
c B
C
a
c
二、竖直角测量原理
在同一竖直面内瞄准 方向的倾斜视线和水平 线之间的夹角称为竖直 角。视线在水平线之上 称为仰角,符号为正; 视线在水平线之下称为 俯角,符号为负。
竖直角用 表示。
第二节 光学经纬仪
一、光学经纬仪系列 光学经纬仪按其精度划分为DJ1 ,DJ2 ,
测回较差24 ″
方向观测法记录表
测 站
测
回 数
目 标
读数
盘左
盘右
左– (右
(左+右 ±180°)/2
±180°)
(2C)
方向值
归零方向 值
°′″
°′″
″
°′″
°′″
0 02 15
A 0 02 00
180 02 18
-18 0 02 09 0 00 00
B 60 32 30
OІ
C 135 03 48
15
20
92 91 90 89
5 4 32
5 432
90°47′06″
0 4 32
15
20
92 91 90 89
5 432
90°47′06″
四、经纬仪的操作
DEM数据采集
DEM数据采集为了建立DEM,必需量测一些点的三维坐标,这就是DEM数据采集或DEM数据获取,被量测三维坐标的这些点称为数据点或参考点。
一、DEM数据点的采集方法l.地面测量利用自动记录的测距经纬仪(常称为电子速测经纬仪或全站经纬仪)在野外实测。
这种速测经纬仪一般都有微处理器,它可以自动记录与显示有关数据,还能进行多种测站上的计算工作。
其记录的数据可以通过串行通讯,输入其它计算机(如PC机)进行处理。
2.现有地图数字化这是利用数字化仪对已有地图上的信息(如等高线、地性线等)进行数字化的方法。
目前常用的数字化仪有手扶跟踪数字化仪与扫描数字化仪。
(1)手扶跟踪数字化仪将地图平放在数字化仪的台面上,用一个带有十字丝的鼠标,手扶跟踪等高线或其它地形地物符号,按等时间间隔或等距离间隔的数据流模式记录平面坐标,或由人工按键控制平面坐标的记录,高程则需由人工按键输入。
其优点是所获取的向量形式的数据在计算机中比较容易处理;缺点是速度慢、人工劳动强度大。
(2)扫描数字化仪利用平台式扫描仪或滚筒式扫描仪或CCD阵列对地图扫描,获取的是栅格数据,即一组阵列式排列的灰度数据(也就是数字影像)。
其优点是速度快又便于自动化,但获取的数据量很大且处理复杂,将栅格数据转换成矢量数据还有许多问题需要研究,要实现完全自动化还需要做很多工作。
目前可采用半自动化跟踪的方法,即采用交互式处理,能够由计算机自动跟踪的部分由其自动完成,当出现错误或计算机无法处理的部分由人工进行干预,这样既可以减轻人工劳动强度,又能使处理软件简单易实现。
3.空间传感器利用GPS(Global Positioning System)、雷达和激光测高仪等进行数据采集。
4,数字摄影测量方法这是DEM数据点采集最常用的一种方法。
利用附有自动记录装置(接口)的立体测图仪或立体坐标仪、解析测图仪及数字摄影测量系统,进行人工、半自动或全自动的量测来获取数据。
二、数字摄影测量的DEM数据采集方式数字摄影测量是空间数据采集最有效的手段,它具有效率高、劳动强度低等优点。
全圆测回法数据处理四个点

全圆测回法数据处理四个点
1.架设好全站仪在控制点处,仪器调至盘左状态(一般情况全站仪水准管一侧靠向观测者为盘左状态,反之为盘右状态。
)全站仪的竖直度盘是侧面的圆盘,在外形上能看到一个圆形的“包”。
这个竖直度盘在左侧,则经纬仪是盘左(正镜),在右侧就是盘右(倒镜)。
如果全站仪的外形左右对称,竖盘在哪面不明显,有一个经验性的区分方法:如果仪器侧面安装有很长的(大约10cm)电池,那么该面就不是竖直度盘所在,电池在右侧,则是盘左,否则是盘右。
2.在盘左状态下先观测A点(需要观测的点),观测A点和后续B点应该遵循从同一方向向另一方向微调(比如观测A点时,先将全站仪调至A点棱镜中心点左侧,然后再微调向右侧对准棱镜中心点读取数据,后续观测B点及其他点棱镜中心点时均先将全站仪调至棱镜中心点左侧再向右侧微调至棱镜中心点读取数据。
)观测时尽量精准的使全站仪镜头内十字丝中心对准目标点(棱镜中心点)。
3.对准观测A点后,进行配盘(配盘是在全站仪上输入观测点角度,一般第一个点设置角度为0°),记录盘左状态A点水平度盘读数,然后将全站仪顺时针转动调整至B点对准观测点中心点,记录盘左状态B点水平度盘读数,计算半测回角值(β=B-A)即B点盘左状态水平度盘读数减去A点盘左状态水平度盘读数所得数值。
4.盘左状态下观测记录结束后,调整全站仪至盘右状态(将全转仪水平旋转180°),使全站仪镜头内十字丝中心对准B点中心点,
记录B点盘右状态水平度盘读数,然后将全站仪逆时针转动调至A点对准观测点中心点,记录A点盘右状态水平度盘读数,计算半测回角值(β=B-A)即B点盘右状态水平度盘读数减去A点盘右状态水平度盘读数所得数值。
实验4 经纬仪的认识、使用和水平角的测量
实验4 经纬仪的认识、使用和水平角的测量一、目的1.了解DJ6经纬仪各部件及有关螺旋的名称和作用。
2.掌握经纬仪的对中、整平、瞄准和读数方法。
3.掌握用经纬仪测定地面两目标方向之间水平角的测回法。
二、安排1.时数:课内2学时;小组:2~4人。
2.仪器:每组领DJ6经纬仪1台、测伞1把、记录板1块。
3.场地:平地安置仪器,远处选择两个背景清晰的直立目标。
三、内容(一) 认识经纬仪1.安置松开架腿,调节其长度后拧紧架腿螺旋;将三角架张开,使其高度约与胸口平,挂上垂球,移动三角架,使垂球大致对准地面测站点标志,架头基本水平,然后将架腿的尖部踩入土中(或插在坚硬路面的凹陷处);从仪器箱中取出经纬仪,用中心连接螺旋将其固连到脚架上。
2.认识了解仪器各部件及有关螺旋的名称、作用和使用方法;熟悉读数窗内度盘和分微尺影像的刻划和注记。
(二) 使用经纬仪1.对中稍许松开中心连接螺旋,双手扶基座,在架头上平移仪器,使垂球尖对准地面测站点标志,偏差不超过2~3mm,再拧紧连接螺旋。
2.整平松开水平制动螺旋转动照准部,使水准管与任一对脚螺旋平行,按“左手法则”使水准管气泡居中;再将照准部转动90°,旋转另一只脚螺旋,使气泡居中。
重复上述步骤,直到照准部转至任何位置气泡偏离不超过1格为止。
如经纬仪装有光学对中器,可以使仪器的对中和整平同时进行。
先将仪器初步整平,中心大致对准测站点,旋转对中器目镜调焦螺旋,使分划板小圆圈清晰,再伸缩对中器小镜筒,使测站点标志清晰。
通过旋转脚螺旋使测站点标志进入小圆圈中间,再通过升降脚架架腿的高度使照准部水准管气泡在相互垂直的方向上均居中 (此时不应再旋转脚螺旋调节水准管气泡,否则将使测站点标志偏离小圆圈),即达到同时对中和整平的目的。
3.照准先松开照准部和望远镜的制动螺旋,将望远镜指向明亮的背景或天空,旋转目镜调焦螺旋,使十字丝清晰,然后转动照准部,用望远镜上的瞄准器对准目标,再通过望远镜瞄准,使目标影像位于十字丝竖丝附近,旋转对光螺旋,进行物镜调焦,使目标影像清晰,消除视差,最后旋转水平和望远镜微动螺旋,使十字丝竖丝单丝与较细的目标精确重合,或双丝将较粗的目标夹在中央。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
附件4 经纬仪矩形
水平角观测:
测站编号
竖盘 位置 目
标
水平度盘读数 半测回较值 较差 一测回角值
°′″ °′″ ″ °′″
1 左 A 00 00 00 90 00 00 18 90 00 09
B 90 00 00
右
A 179 26 42
90 00 18
B 269 27 00
2 左 A 00 00 00 90 00 00 6 89 59 57
B 90 00 00
右
A 182 05 06
89 59 54
B 272 03 00
3 左 A 00 00 00 89 58 06 18 89 58 15
B 89 580 6
右
A 179 59 06
89 58 24
B 269 57 30
4 左 A 00 00 00 89 45 06 30 89 45 21
B 89 45 06
右
A 179 59 06
89 45 36
B 269 44 42
边长测量(钢尺):
4 3
2 1
边名 第一次测量 第二次测量 边长(m)
13边
20.019 20.011 20.015
34边
20.082 20.088 20.085
42边
20.006 19.004 20.000
21边
20.022 20.027 20.025