航天压电陶瓷微位移作动器设计与实验研究
基于压电陶瓷的新型尺蠖式微位移器的设计

基于压电陶瓷的新型尺蠖式微位移器的设计
杨刚;刘俊标;李勇滔;罗雪丰
【期刊名称】《现代科学仪器》
【年(卷),期】2009(000)004
【摘要】利用压电陶瓷的逆压电效应,基于尺蠖运动原理设计了一种高精度定位的微位移器.本文详细介绍了这种新型尺蠖式微位移器的设计过程.针对当前压电陶瓷驱动电源不能将断电后的压电陶瓷中的电荷放出的缺点,本文所设计的新型放电电路使其放电时间达到毫秒级.通过加入这个放电电路,压电陶瓷将能更快的恢复原形,提高了压电陶瓷的运动精确性.
【总页数】3页(P33-35)
【作者】杨刚;刘俊标;李勇滔;罗雪丰
【作者单位】中国科学院电工研究所,北京,100190;中国科学院研究生院,北
京,100049;中国科学院电工研究所,北京,100190;中国科学院电工研究所,北
京,100190;中国科学院研究生院,北京,100049;中国科学院电工研究所,北
京,100190;中国科学院研究生院,北京,100049
【正文语种】中文
【中图分类】TM359.4;TH6;TH703
【相关文献】
1.基于压电陶瓷的摩擦式微进给机构的设计 [J], 卢泽生;刘海涛
2.基于液压微位移放大机构的压电陶瓷执行器的设计 [J], 李万全;高长银;冯地耘
3.尺蠖型压电微位移驱动器—一种新型的线性步 [J], 过蝶农
4.一种单片机控制的压电陶瓷微位移器的驱动电路设计 [J], 程继兴;刘霞
5.基于液压微位移放大结构的新型压电陶瓷直接驱动阀设计及仿真 [J], 俞军涛;焦宗夏;吴帅
因版权原因,仅展示原文概要,查看原文内容请购买。
压电陶瓷的压电原理及制作工艺

混 合
预 烧
粉 碎
成 型
排 胶
测 试
极 化
上 电 极
机 加 工
烧 成
压电陶瓷的制作工艺
•配料(原料的选择和处理)
原料是制备压电陶瓷的基础。选择原料一 般应注意其化学组成和物理状态。
(1) 纯度
对纯度的要求应适度。高纯原料,价格昂 贵,烧结温度高,温区窄。纯度稍低的原料, 有的杂质可起矿化和助熔的作用,反而使烧结 温度较低,且温区较宽。过低纯度原料杂质多, 不宜采用。
•压电陶瓷内部结构(电畴形成)
①c轴方向决定自发极化取向 ②能量最低原则决定畴结构
晶格匹配要求 能量最低要求 晶胞自发极化取向 一致小区的存在 自发极化取向不一 致小区的搭配 晶粒中形成 一定的小区 排列状态— 畴结构
③相结构决定畴壁类型
压电陶瓷的压电原理
•压电陶瓷内部结构(电畴形成)
因为晶粒为四方相时,自发极化取向与原 反应立方相三个晶轴之一平行,所以,相邻两 个畴中自发极化方向只能成90°角或180°角, 相应电畴交界面就分别称为90°畴壁和180° 畴壁。
红外探测计
位移与致动器 激光稳频补偿元件,显微加工设备及光角度,光程长的控制器 存 贮 其它 调制
存贮
显示 非线性元件
光信息存贮器,光记忆器
铁电显示器,声光显示器等 压电继电器等
压电陶瓷的用途
•压电陶瓷泵
进口
压电陶瓷 换能器
阀 出口
压电陶瓷的用途
•压电陶瓷喷墨打印
金属片 压电陶瓷 换能器 圆锥形容器 内液层 外墨水池
压电陶瓷极化台
压电陶瓷的用途
压电变压器电警棍
压电陶瓷的用途
压电陶瓷变压器雷 达显示器高压电源
压电微位移器的实验建模与复合控制

压电微位移器的实验建模与复合控制
王建红;陆宝春;张建华;万其;黄家才
【期刊名称】《组合机床与自动化加工技术》
【年(卷),期】2014(000)010
【摘要】为实现动静态特性理想的压电微位移器控制,提出一种前馈控制和PI控制相结合的微细位移控制算法。
对该压电微位移器进行迟滞特性实验测试,以实验数
据为基础建立了迟滞特性的Preisa-ch模型,采用比例环节作为前馈控制器, PI控制作为反馈控制环节,构成复合控制。
仿真结果表明:系统阶跃响应稳态误差小于
0.4μm,调节时间小于2ms,能够满足精密加工要求。
【总页数】4页(P40-42,46)
【作者】王建红;陆宝春;张建华;万其;黄家才
【作者单位】南京工程学院自动化学院,南京 211167;南京理工大学机械学院,南京 210094;南京工程学院自动化学院,南京 211167;南京工程学院自动化学院,南京 211167;南京工程学院自动化学院,南京 211167
【正文语种】中文
【中图分类】TH122;TG65
【相关文献】
1.菱形微位移压电作动器的输入输出线性建模 [J], 张春林;张希农;陈杰;张帅
2.菱形微位移压电作动器输入输出杂交建模 [J], 张春林;贺国京;易锦
3.压电微位移台的动态迟滞建模及实验验证 [J], 杨晓京;彭芸浩;李尧
4.WTYD型压电陶瓷微位移器的迟滞特性建模与实验验证 [J], 王代华;朱炜
5.微位移系统中压电陶瓷驱动器迟滞建模 [J], 吕雪军;李国平;邱辉;李剑锋
因版权原因,仅展示原文概要,查看原文内容请购买。
光的干涉系统 实验4-2干射法测量压电陶瓷特性
六 干涉法量微小位移实验测一、实验目的1.通过实验熟悉激光测长仪(迈克尔逊干涉仪)的基本工作原理。
2.学会搭设激光光路的基本方法与技巧。
3. 掌握利用光的干涉原理测量物体微小位移方法。
4. 掌握压电陶瓷的特性及正确使用方法。
二、实验内容1.根据迈克尔逊干涉仪原理,设计一测量压电陶瓷膨胀(收缩)特性实验系统并搭设激光光路。
2.推导位移L与条纹变化数N的关系式。
3.测量压电陶瓷工作电压U变化与位移L关系,并Excel绘制 U-L曲线。
4.计算出电压为300伏时压电陶瓷最大位移量L max。
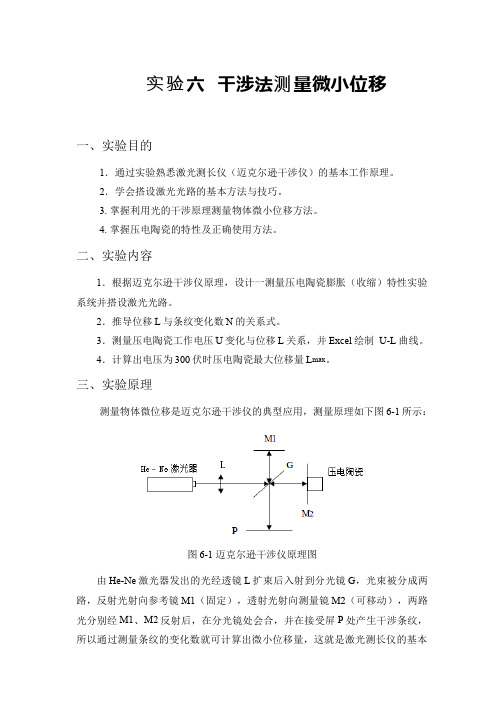
三、实验原理测量物体微位移是迈克尔逊干涉仪的典型应用,测量原理如下图6-1所示:图6-1 迈克尔逊干涉仪原理图由He-Ne激光器发出的光经透镜L扩束后入射到分光镜G,光束被分成两路,反射光射向参考镜M1(固定),透射光射向测量镜M2(可移动),两路光分别经M1、M2反射后,在分光镜处会合,并在接受屏P处产生干涉条纹,所以通过测量条纹的变化数就可计算出微小位移量,这就是激光测长仪的基本原理。
本实验是利用压电陶瓷的特性,通过施加工作电压使压电陶瓷产生膨胀,从而推动固定在一维导轨上的反射镜(动镜)移动致使干涉条纹发生变化。
四、实验仪器减震光学平台、He-Ne激光器(波长0.6328μm)、可调反射镜、分光镜、接收屏、可调高压直流电源(调节范围0 — 350V)、 一维导轨、被测压电陶瓷一块、光电探测器和干涉条纹自动采集实验系统。
五、实验步骤1.调整激光器使之发出的光与平台平行2.用自准直法分别调节反射镜和分光镜与激光束垂直(即与光学平台垂直)。
3.搭设实验光路(1)放置动镜M2(M2与被测压电陶瓷一起固定在一维移动导轨上)使之激光束垂直。
(2)放置扩束透镜,使透镜光轴与激光束同轴。
(3)放置分光镜G与定镜M1,并分别调节G和M1使观察屏P上出现等倾干涉条纹。
4.撤掉观察屏P换上光电探测器,使干涉环中心暗(亮)斑对准光探测器接收窗,开启计算机进入“干涉条纹自动采集实验系统”5.测量开始,给压电陶瓷缓慢加电升压,根据测量曲线,记录电压与干涉条纹变化数量相关数据。
压电陶瓷2

压电陶瓷基本特性:1.位移特性KS EEQL r2 2εεε+=∆式中,Q r为极化后的剩余电荷,ε为压电介质的介电常数,E为压电陶瓷内部电场强度,S为压电陶瓷的横截面积,K为压电陶瓷碟片的弹性模量,ε0 为真空的介电常数式中的ε不是常量,而是和所加电压和加压史有关,因而压电陶瓷位移和电场强度(电压)的关系存在迟滞特性。
下图为这一陶瓷在正负电压下的位移-电压特性曲线:2.出力位移特性在空载的情况下压电陶瓷的输出位移为最大输出位移,在最大输出力的作用下,压电陶瓷的输出位移将为零,压电陶瓷的输出力和位移的关系曲线如下图:3.温度特性①压电陶瓷随着温度的变化而伸长。
②压电/电致伸缩陶瓷的输出位移随着温度的增加而减少,压电陶瓷的减少幅度较小,电致伸缩陶瓷减少幅度较大。
4.迟滞特性压电陶瓷的迟滞一般在14%左右,目前提出的减少迟滞的方法主要有:①采用电荷控制方法;②采用压电陶瓷两端串联小电容的方法;③运用模型;④采用电阻和电容组成桥路;⑤压电陶瓷元件位移闭环压电陶瓷作动器是高精度定位中的关键部件,它能满足纳米级定位精度,具有体积小、刚度高、响应快等优点。
然而它的相应位移和驱动电压之间存在着非对称迟滞特性,同时自身的蠕变和环境温度的变化也会造成其定位精度的漂移。
而且压电陶瓷作动器的非对称迟滞特性对控制精度的影响十分显著。
为减少和消除该不利影响,目前主要有两种解决途径:①电荷控制:它需要特别设计的电荷驱动放大器,但该放大器价格昂贵,且存在漂移和过饱和等问题,因而极大的限制了其应用;②电压控制:需要建立非线性迟滞的数学模型,并通过逆模型前馈补偿来控制精度。
电压控制逐渐成为压电陶瓷作动器精密控制的首选方案,其关键是非线性迟滞的精确建模。
对于迟滞特性建模存在两个困难:1)非局部存储现象.2)上升曲线和下降曲线是不对称曲线迟滞模型的研究主要分为两个方向:一种是基于机理的物理模型,从基本物理原理出发描述物理特性;如Maxwell模型,Jiles-Atherton模型,Duherm模型。
天津大学工程光学实验——压电陶瓷特性测量

d 2 1 2nL
光程差没变化一个波长干涉条纹就明暗变化一次,则测量过程中 d 相对 应的干涉条纹变化次数为
实验内容 1. 推导出位移 L 和条纹变化数 N 的关系式。 2. 测量位移 L 与电压 U 的关系,并表述 U-L 曲线。 3. 计算出最大位移量 Lmax。 实验要求 1. 调整激光器使光束与平台平行,并进行扩束。
位移l和条纹变化数n的推导设在测量开始时一束激光经分光器g分成两束它们经参考反射镜m1和目标反射镜m2后沿原路返回并在分光电处重新相遇两束光的光程差为为目标反射镜m2到分光点的距离为参考镜m1到分光点的距离
天津大学本科生实验报告ห้องสมุดไป่ตู้
课程名称:压电陶瓷特性测量 实验二
一、 实验目的
姓名:
学号:
学院:精仪学院
Lmax 10.76 m
1. 通过实验掌握激光测长仪的基本工作原理; 2. 掌握搭设激光光路的基本方法与技巧; 3. 学会用干涉方法测量微小位移。 二、 实验原理 测量位移是迈克尔逊干涉仪的典型应用,测量原理如图-1 所示。 由 He-Ne 激光器发出的光 经分光镜 G 后,光束被分成两 路,反射光射向参考镜 M1(固 定) , 透射光射向测量镜 M2 (可 移动) ,两路光分别经 M1、M2
N
式中 0 为激光光波中心波长。
d 2nL 0 0
天津大学本科生实验报告
课程名称:压电陶瓷特性测量 姓名: 学号: 学院:精仪学院
五、 思考题 实验原理光路中未加补偿镜,为什么?请说明原因。 答:由于实验中使用单色光,光程损失可以通过调节参考反射镜的位置进行 补偿,这样就可以免去补偿镜。
反射后,在接受屏 P 处产生干涉,通过测出条纹的变化数可计算出位移量, 这就是激光测长仪的基本原理。 三、 实验仪器
压电陶瓷作动器非对称迟滞的建模与补偿控制
Z HAO Xi a o — x i n g ,J I ANG We i ,L I We i
( S t a t e K e y L a b o r a t o r y o f D i g i t a l Ma n u f a c t u r i n g E q u i p me n t a n d T e c h n o l o g y , Hu a z h o n g U n i v e r s i t y o f S c i e n c e a n d T e c h n o l o g y , Wu h a n 4 3 0 0 7 4 , C h i n a )
一种压电陶瓷微位移器驱动电源研究
一种压电陶瓷微位移器驱动电源研究朱婷【摘要】在研究压电陶瓷微位移器的基础上,针对压电陶瓷的驱动特点和要求,设计了一种驱动电源.以单片机Atmega128和高压运算放大器PA78为核心器件,以及相关电路构成电压控制型驱动电源.介绍了主要模块电路的功能和实现,并对驱动电源进行测试实验.驱动电源可输出0 ~300 V连续电压,分辨率可达10 mV、静态纹波<5 mV.结果表明该电源具有线性度高、稳定性好、分辨率高等优点.【期刊名称】《电子科技》【年(卷),期】2016(029)005【总页数】4页(P13-15,18)【关键词】压电陶瓷微位移器;驱动电源;AVR;高压驱动【作者】朱婷【作者单位】武汉理工大学机电工程学院,湖北武汉430070【正文语种】中文【中图分类】TN86压电陶瓷是一种具有压电特性的电子陶瓷材料,利用其逆压电效应可被做成微位移器。
由于其体积小、推力大、响应快、分辨率高等优点,被广泛应用于精密测量、纳米技术、机器人、微电子等领域[1-4]。
压电陶瓷微位移器的有效工作离不开性能优良的驱动电源,因此需要研究设计具有良好性能的驱动电源;压电陶瓷微位移器的驱动方式可分为电流控制型和电压控制型[5-6],各驱动方式有其各自的优点和应用。
本文设计的驱动电源基于电压控制型,对输出电压要求为:0~300 V连续可调,分辨率<10 mV,静态纹波<5 mV。
驱动电源总体框图如1图所示。
主要由计算机、微处理器控制电路、D/A模块、滤波电路、放大电路和直流稳压电源模块组成。
计算机通过串口与微处理器通信,对其发出指令电压;微处理器接收计算机的指令并控制D/A模块实现0~5 V连续可调电压输出;D/A模块输出的电压经滤波、放大等处理,输出计算机要求的稳定电压;直流稳压模块给各模块电路提供所需电源电压。
微处理器选择Atmega128,它是一款高性能、低功耗的AVR8位微处理器;具有先进的RISC指令结构,工作电压为4.5~5.5 V,工作于16 MHz时性能高达16 MIps。
沈阳航空航天大学科技成果——纳米操作驱动器迟滞特性分数阶建模与控制研究
沈阳航空航天大学科技成果——纳米操作驱动器迟滞特性分数阶建模与控制研究
本成果研究出一种新的、易于实现、精度更高的迟滞非线性建模和控制方法。
本研究将分数阶系统理论应用于纳米操作系统建模、辨识、控制全过程。
原子力显微镜压电陶瓷微驱动特性测试:分别基于电容式微位移测试系统和基于显微视觉的亚像素测试系统,研究了压电陶瓷驱动器在不同激励信号下的响应特性;压电陶瓷驱动器的分数阶模型的建立:利用非线性随机数直接搜索和粒子群寻优算法对压电陶瓷分数阶数学模型的结构参数及阶次进行了辨识,在分数阶微积分框架下对压电陶瓷微驱动器的迟滞非线性特性进行了精确的描述和解释;分数阶PID 控制器的设计:基于辨识好的压电陶瓷微驱动器的分数阶模型,设
计出了性能优越的分数阶控制器,对压电陶瓷驱动器的非线性特性进行了有效的校正。
合作方式:技术入股、合作开发。
压电 微位移台
压电微位移台是一种利用压电效应实现微小位移控制的装置。
压电效应是指某些晶体在受到外加电场作用时,会发生微小的形变,进而引起位移。
压电材料通常是具有压电效应的晶体材料,如二氧化锆(ZrO2)、铅锆钛酸铁(PZT)等。
压电微位移台通常采用了压电陶瓷作为驱动器。
当施加电压时,压电陶瓷会发生压电效应,从而使得微位移台发生微小的位移。
这种位移可以用来实现微调、微精度定位、振动控制、调焦等功能。
压电微位移台具有快速响应、高精度、微小尺寸等特点,因此在精密仪器、光学设备、纳米技术等领域得到广泛应用。
压电微位移台通常包括压电陶瓷驱动器、位移传感器、控制电路等组成部分。
驱动器通过施加电压控制位移,位移传感器用于测量位移的大小和方向,在控制电路的控制下,实现对位移的精确控制。
压电微位移台的应用范围广泛,包括精密仪器的调试与组装、激光微加工、生物医学研究、纳米尺度测量等领域。
它在这些领域中的应用可以实现微小调整和精确定位,以满足各种精密应用的要求。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1998年第6期总第236期导弹与航天运载技术MISSI L ES AN D SPACE VEHIC L ESNo.61998Sum No.236航天压电陶瓷微位移作动器设计与实验研究Ξ阎绍泽 吴德隆 黄铁球 张 永(北京宇航系统工程设计部,100076)摘要 机械精密作动器已经不能满足空间飞行器多方面的要求,因而利用压电陶瓷材料的正逆压电效应,设计制造了一种高调准精度的微位移作动器,并对其进行了实验研究。
实验结果揭示了压电作动器用于空间飞行器部件的定位和抑制振动的优良性能,为进一步完善作动器的设计和在航天领域的推广应用提供了理论基础。
主题词 位移控制器,航天器,压电陶瓷,振动控制。
Design and Experiment for a Piezo2CeramicMicro2Displacement Actu ator on SpacecraftYan Shaoze Wu Delong Huang Tieqiu Zhang Y ong(Beijing Institute of Astronautical Systems Engineering,100076)Abstract A novel micro2displacement actuator with very high precision posi2 tioning has been developed by use of oppose and positive piezo2electric effects of piezo2 ceramics materials because mechanical micro2displacement actuators cannot meet de2mands of a spacecraft.A set of measuring system has been built,and properties of theactuator are experimented.The experiment result shows good properties of the actua2tor in precision positioning and vibration suppressing.The theoretical and experimen2tal basis for design and extensive application of a micro2displacement actuator inspacecraft is provided.K ey Words Displacement controller,Spacecraft,Piezoelectric ceramic,Vibra2 tion control.1 前 言随着科学技术的不断发展,特别是宇航技术的推动,太空光学装置或仪器常要求精密调节光角度、光程,需要微定位及微调节技术。
通常采用带有丝杠的机械装置,利用电机或其它Ξ收稿日期:1998202226本课题由中国航天工业总公司博士后科学基金、国家自然科学基金和国家863高技术项目基金资助机电换能装置驱动,将大的行程缩小,此类装置费用很昂贵。
特别是机械装置不可避免地存在蠕动和空程,使得其分辩率有限,所提供的位移精度一般不超过1μm。
因此,机械精密作动器已经不能满足空间飞行器新的精度要求。
Smart材料的出现,为空间飞行器的精密位移作动器提供了新颖的设计思路。
压电材料由于其优良的性能,越来越受到航天部门的重视。
采用压电材料制造的作动器体积小,结构紧凑,精度高且具有可遥控的特点,已在航天产业的诸多领域得到了应用。
对该项技术进一步进行研究和开发,有望解决许多空间飞行器设计的难点问题,如消除火箭、导弹系统平台传感器的振动环境,消除太空桁架中的铰间隙,改变结构中的预紧力,空间站上抛物面天线的精确定位等难点问题。
目前,美国等发达国家已将这类作动器用于战斗机、天基武器系统、空间站等飞行器的研究开发,预计在21世纪Smart材料与结构将引发新的科技变革。
2 微位移作动器工作原理及设计2.1 工作原理压电陶瓷具有产生与机械压力成正比的电荷能力,称之为正压电效应;产生与形变成正比的形变效应,称之为逆压电效应,其材料的本构关系为D=d t T+εT E(1)S=s E T+d E(2)式中 D为电位移(电荷/面积);D=[D1 D2 D3]t;S为应变;E为电场强度;T为应力;εT为介电常数矩阵,εT ij=[5D i5E j]T;s E为柔度矩阵;d为压电常数矩阵,d ij=[5S j5E i]T=[5D i5T j]E。
文中约定上标t表示转置,上标T表示该量以恒值(或零值,也称之为自由状态)应力时的结果,上标E表示该量以恒值(或零值,也称之为短路)电场时的结果。
对于压电材料,作动应变与作用电场的关系为S=0000d150000d1500d31d32d33000er pact E1E2E3t r (3) 对于在其厚度方向极化的薄片型压电陶瓷,在电场作用下,其厚度的相对变化与施加电场强度的关系可简化为Δl=d33V(4)式中 V为施加陶瓷片上的电压(V);d33为陶瓷的压电常数,一般大约在6×10-12m/V 量级。
由压电材料制造的压电式作动器系电驱动元件,该元件无需旋转部件,而是利用压电效应改变其尺寸。
在压电式作动器上施加不同的电压,其长度将有所改变。
其变化范围可从几分之一微米直到毫米的量级,最大伸长量以及作动器最大输出力取决于元件的结构。
从理论上说,压电元件的分辨率是没有限制的,而且仅取决于所实施电压的稳定性,电压的每一变化都将直接转换成作动器的线性移动,能量损耗极小。
因此,特别适合于在航天器中应用。
62 导弹与航天运载技术 1998年2.2 作动器设计航天主动元件(或称多功能结构)一般由传感器、作动器、控制器和主体结构组成,其中作动器设计是主动元件设计的关键环节之一。
对于精密结构的控制,无需大的冲程与作用力,故可采用压电陶瓷材料PZT 制作作动器。
在需要较大控制行程时,单片压电陶瓷的微位移量有限,需要采用多片叠加构成压电陶瓷叠层。
压电叠层中的压电陶瓷片之间一般可采用电极串联或并联形式。
并联可以获得大的电荷灵敏度或微位移行程,用较低的控制电压获得较大的位移量;串联结构可增加元件灵敏度。
图1为压电陶瓷叠层作动器。
作动器由控制器通过电压放大器进行驱动,当电压作用在作动器叠层上时,使作动器长度发生改变,同时诱发了结构应变,产生了控制力,其大小由作用于叠层上的电压决定。
(a )电学串联 (b )电学并联图1 压电陶瓷叠层作动器的构成为了在较低的电压下获得较大的变形量,作动器必须采取多层叠片式结构,将压电陶瓷片一片片叠起来,采取机械串联、电学并联的方式组成压电陶瓷组件。
一旦加上电压,电场指向极化方向,就会导致每个陶瓷片变厚,使整个陶瓷片组伸长,其总伸长量ΔL 为ΔL =nd 33V (5) 由上式可以看出,采用不同的片数n 可得到不同伸长的作动器。
图2为本文设计制造的作动器结构简图。
该作动器由压电陶瓷组件、移动头、外壳和电极引线等组成,施加电压后,移动头沿外壳轴向伸长。
作动器的初始设计要求为:最大正向驱动电压1000V ,最大位移不小于50μm ;也可采用±500V 得到±25μm 微位移。
根据这些初始参数,经设计计算确定的压电陶瓷叠层作动器设计参数列于表1。
表1 压电陶瓷叠层作动器设计参数参数量值参数量值PZT 圆片直径d10mm PZT 圆片厚度1.0mm 叠层中PZT 片数n84片密度ρ7.5×103kg/m 3杨氏模量E3.6×1010N/m 2压电系数d 33700×10-12m/V72第6期 阎绍泽等 航天压电陶瓷微位移作动器设计与实验研究 图2 作动器结构示意图制造压电作动器的原材料为PZT 压电陶瓷(用于制造作动器叠层)、不锈钢(用于制造作动器外壳)、银(用于制作电极)、绝缘材料(用于压电叠层与外壳之间的绝缘)。
3 压电作动器的实验研究3.1 单片压电陶瓷的实验研究图3为单片压电陶瓷动态实验框图。
实验系统由信号发生器、频率计、毫伏表等组成。
由实验框图可以看出,调节信号发生器的频率f ,压电陶瓷片的阻抗就要发生变化。
因为R 1与压电陶瓷片串联,因此R 1上的电压也发生变化。
这个变化可以通过并联在R 1上的毫伏表读出来。
实验目的在于测出压电陶瓷片在正弦信号作用下的幅频特性,测试数据见表2。
根据这些数据采用三次样条函数拟合绘出作动器的幅频特性曲线(见图4)。
从图中可以看出,150Hz 以内幅频特性变化基本平稳,近似为线性关系。
图3 单片压电陶瓷动态实验框图 图4 用三次样条函数拟合的曲线 利用上述实验系统及所测试的实验数据可以得到单片压电陶瓷的谐振频率f r 和反谐振频率f a 。
图3所示实验系统也是测试压电陶瓷的谐振频率f r 和反谐振频率f a 的传输电路。
当单片压电陶瓷作动器阻抗最小时,电流出现最大值,相应的毫伏表读数也为最大值;当单片压电陶瓷作动器阻抗最大时,电流出现最小值,相应的毫伏表读数也为最小值。
因此,可82 导弹与航天运载技术 1998年根据毫伏表指示,采用频率计确定压电陶瓷的谐振频率f r 和反谐振频率f a 。
由表2和图4可以看出,在频率为199kHz 时,毫伏表的电压最大值达到862mV ;当频率调节到248kHz 时,毫伏表读数最小值为5.6mV ;由此确定单片压电陶瓷的谐振频率为199kHz ,反谐振频率f a 为248kHz 。
表2 幅频特性测试数据频率/kHz 102030405060708090幅值/mV 2133548293122145165190频率/kHz 100150199200210220248250300幅值/mV2143818628606833855.61982103.2 微位移作动器实验研究图5为微位移作动器实验系统框图。
实验系统由电容位移测量仪、电压放大器和电压表等组成。
实验时,放大器输出直流高压驱动作动器产生位移。
从零伏起,间隔50V 记录一次作动器位移变化量。
加压到1000V 后,再降压记录作动器位移量,间隔仍为50V ,直到降压到0V 为止。
位移变化量由电容位移测量仪直接读出,测试数据见表3,图6为根据实验数据绘出的实验曲线。
图5 静态实验框图 图6 作动器位移变化实验曲线测试结果表明本文研制的作动器达到了初始设计参数要求:在最大驱动电压为1000V 时,作动器位移达到了54.7μm 。
根据表3和图6可以看出,当电压由小增大和从大到小时,作动器位移值在各点相异,且不回零。