考虑运动副间隙的平面四杆机构动力学建模与仿真
5-第二章 平面四杆机构的设计

C2
C1 γmin ψ
90o −θ
θ B1 θ
G F A点选在C1G、 C2F两弧段上,则当A向G(F)靠近时, 机构的最小传动角将随之减小而趋向零,故A应适当远 离G(F)点较为有利。
P
┏
D
2、曲柄滑块机构 、 已知:K,滑块行程H,偏距e。 θ 分析:K→θ,关键是求满足θ角的A点 步骤: θ ①计算: ②作C2 C1 =H ③ 作 射 线 C2O 使 ∠C1C2O=90°-θ, θ 作射线C1O使∠C2C1 O=90°-θ。 ∠ ④以O为圆心,C1O为半径作圆。 ⑤作偏距线e,交圆弧于A,即为所求。 ⑥以A为圆心,AC2为半径作弧交于E,得: A
D
∞
B1 B3 D A C1
C3
C2 C3
A
三、按预定两连架杆的对应位置设计四杆机构——解析法 按预定两连架杆的对应位置设计四杆机构 解析法 已知: 求:各杆长度l1、l2、l3、l4 解: 四杆机构两转角的对应关, 取决于各杆的相对尺寸。 令 消去δi,则有:
δ
l4
l3
令
则有:
cosϕi = P cosψi + P cos( i −ϕi ) + P ψ 0 1 2
√ ? A
B C1
√C ? D
C2 C3
D
同理作Ci点的中垂线求得D点。
C1 C2 若给定连杆两个位置,则有无穷多解; ——借助于辅助条件求得A或D 若给定连杆三个位置,有唯一解; 若C1、C2、C3位于一条直线上,D ∞,则 杆CD是滑块; 设计后要检验运动连续性( C1、C2、C3 应在同一可行域内)。 B1 B2
90o −θ
E
H C θ 2 C1
m 3、导杆机构 、 已知:机架长度d,K,设计此机构。 分析:由于θ与导杆摆角ϕ相等,设计此 θ ϕ 机构时,仅需要确定曲柄a。 步骤: ① 计算 ② 任选D作∠mDn=ϕ=θ, 作角平分线; ∠ ϕ ③ 取A点,使得AD=l4,则 : l1=l4sin(ϕ/2)。 ϕ 若已知曲柄l1,则作mD的垂线AB=l1 , 则 : l4= l1/sin(ϕ/2)。 ϕ D A B l1 ϕ =θ
基于matlab的平面四杆机构动态仿真
基于matlab的平⾯四杆机构动态仿真摘要:本⽂基于matlab 强⼤的数值计算功能,借助fsolve 函数,建⽴了⼀个平⾯四杆机构模型,并对此进⾏运动仿真,为平⾯四杆机构的尺⼨优化设计和运动分析提供了⼀条简单实⽤的捷径。
关键词:平⾯四杆机构 matlab fsolve 函数1 背景介绍平⾯四连杆机构是⼯程应⽤中使⽤⼴泛的机械结构。
如果知道相应尺⼨下杆件的运动轨迹,速度⼤⼩,对整个机构的优化设计有重要作⽤。
Matlab 具有强⼤的科学计算机数据处理能⼒,出⾊的图形处理功能,且程序语⾔简单。
基于以上叙述,本⽂⾸先设计了平⾯四杆机构的各连杆参数,然后在matlab 环境下运⽤⽜顿-⾟普顿算法,使⽤fsolve 函数快速实现了运动仿真并以图形的形式将其运动情况显⽰了出来。
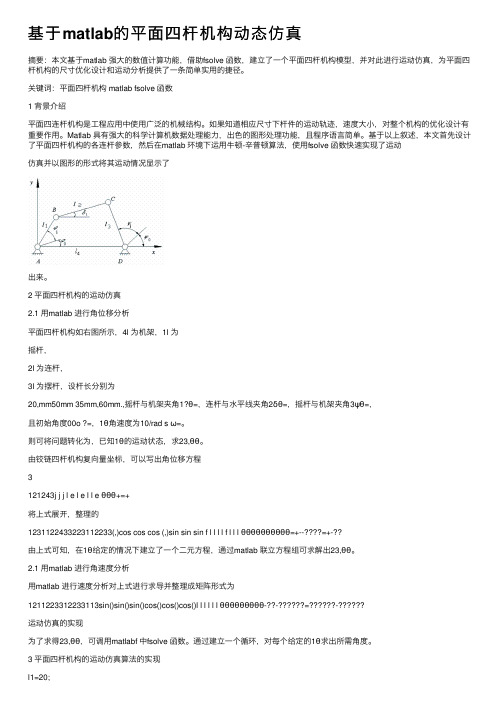
2 平⾯四杆机构的运动仿真2.1 ⽤matlab 进⾏⾓位移分析平⾯四杆机构如右图所⽰,4l 为机架,1l 为摇杆,2l 为连杆,3l 为摆杆,设杆长分别为20,mm50mm 35mm,60mm.,摇杆与机架夹⾓1?θ=,连杆与⽔平线夹⾓2δθ=,摇杆与机架夹⾓3ψθ=,且初始⾓度00o ?=,1θ⾓速度为10/rad s ω=。
则可将问题转化为,已知1θ的运动状态,求23,θθ。
由铰链四杆机构复向量坐标,可以写出⾓位移⽅程3121243j j j l e l e l l e θθθ+=+将上式展开,整理的1231122433223112233(,)cos cos cos (,)sin sin sin f l l l l f l l l θθθθθθθθθθ=+--=+-??由上式可知,在1θ给定的情况下建⽴了⼀个⼆元⽅程,通过matlab 联⽴⽅程组可求解出23,θθ。
2.1 ⽤matlab 进⾏⾓速度分析⽤matlab 进⾏速度分析对上式进⾏求导并整理成矩阵形式为1211223312233113sin()sin()sin()cos()cos()cos()l l l l l l θθθθθθθθθ-??-=-运动仿真的实现为了求得23,θθ,可调⽤matlabf 中fsolve 函数。
四连杆机构的Adams仿真

四连杆机构的Adams仿真铰链四杆机构的仿真假设一个曲柄摇杆机构,其各个杆件尺寸为AB =280×40×20mm ,BC =520×40×20mm,CD =500×40×20mm,AD =720×40×20mm 。
已知主动曲柄角速度ω=30(°)/s , 试建立该机构的虚拟样机模型并分析摇杆的运动。
通过曲柄存在的条件可以判断出该机构为曲柄摇杆机构。
建模及仿真步骤如下:(1)将储存位置设置为C:\Users\Administrator\Desktop\adma\1。
(2)双击桌面图标Adams/View MD R3 或者通过开始→所有程序中找到Adams/View 进入ADAMS 欢迎界面,在Model name 中输入:crank_rocker,如图1所示,单击“OK”按钮进入ADAMS 主界面。
图1 欢迎界面(3)按照给定的各个杆件长度建立机构模型,通常使用如下方法。
利用某时刻各杆形成的特殊形状关系来确定其位置,下面我们去曲柄和机架共线之一的位置,如图2所示。
图2 曲柄与计价的共线位置此时,可利用余弦定理来求解三角形BCD 的位置。
BD 的边长为:BD =AD ?AB =720?280=440mm 根据余弦定理可求得:cos a =BD 2+CD 2?BC 22BD ·CD=0.3936,得a =66.82° 获得特殊位置角后,按下述步骤进行建模:●单击主工具栏图标,在参数设置中输入题目给定的机架尺寸,创建机架,如图3所示。
图3 机架建模●选中机架单击右键,按图4所示的步骤将其命名为frame。
图4 重命名机架●按照同样的方法在机架右端创建给定尺寸的摇杆,如图所示,将其命名为rocker。
右击摇杆选择Part:rocker,如图5所示。
图5 摇杆建模●将摇杆按图所求的角度旋转,选择旋转移动工具按钮,在选择旋转中心,在祝工作区选择摇杆旋转所围绕的中心点,输入所需转动的角度66.82°选择顺时针旋转按钮,如图6所示。
基于1stOpt及SolidWorks的平面四杆机构的优化设计及仿真

敛, 其结果是无法求得正确结果 。而在实际应用 当叶 , 1对大 多数用户来 说 , 出f ) 当的初始值是件相 当困难 的事 , 别是 在参数量较多 给 猜 恰 特 的情况下 , 无异 于是场噩梦。而 1 O t 更 p凭借其超强的寻优 、 s t 容错能 力, 在大多数情况下 (9 % , ) O )从任一随机初始值开始 , 都能求得正确结果 。 按照 I O t p 规则, s t 编写求解 函数程序如下 : 图 1曲柄摇 杆机构 简图 11 .选取设计 变量 平面四杆机构 按 主、 从动 的角度对应关系进行设计 时 , 根杆长 和 3 主、 从动 件的输 入输 起始位 置角为独立 参数 。取 主动件长度 L = , .1 机架 长度 L= 由 1 : 5, 得
一
f0= rcs(b x) 一 22 j2/ q + 1 j ) a:aco(q + 1 2 x +j )2 ( x) j: ( ( b ) p 0= rcs ( + 1 2 x -j )2 x ; u :aeo(q x) 一 22 j2/ 2 (b ^ (
O引 言 .
lt t Moin sOp t o 2数学模型的求解 . 1t p是七 维高科有 限公 司(D— ot g eh ooyIe) O t s 7 SfHi T cnlg .独立 开 h n 发, 拥有完全 自 主知识产权 的一套数学优化分析综合 具软件包 亡 r 非线性 回归 , 曲线拟合 , 非线性 复杂模 型参数估算求解 , 线性/ 线性规 t k 划等领域 傲视群雄 , 首屈 一指 , 世界领 先地位 。除去简 单易用 的界 居 面, 其计算核心是 基于 七 维高科有 限公 司科研人员 数十年的研究成果 通用全局优化算法 ( iesl l a piia o Unvra Go l t zt n一叭 )该算 法之 b O m i O,
基于MATLAB的平面四连杆机构运动仿真

12端 点 B运 动分析 .
在 复 数 坐标 系 中 ,端 点 B的位 置 可 表 示 为 B ri,则 =2 ̄ e2
6
』Brn02 I =c2 I 2si O R 2s e o mB=r
速度分别为 :
( 5 ) 一
。
4
2
分 别 对 上 式 求 一 次 、二 次 导 数 ,得 到 B点 的 速 度 、加
[ ] 孙 桓 , 陈作 模 . 械 原 理 [ ] . 京 : 高 等 教 育 出版 社 1 机 M 北
2 0 . 0 6
( 转第 8 下 4页 )
1 00
5 0
>
一
5 0
。
10 0
图 4 交 替 反相 层 叠 下 相 电 压 波形 及 对 应 频谱
1 0. 0 0
lve i v re sa d DTC o rd v p lc t n .I E a so e l n etr n mo r e a p i ai s EE Tr n n i o
[ ] 刘风 君 ,多 电平 逆 变技 术及 其 应 用 [ ] , 京 :机 械 工 业 出 4 M 北
1 00 0 .
8 . 0O
.
5 0 0.
≮ 0
一
S O 0.
一
1 0. 0 0 0
^ 1 j f
1 0 2 0 0. 0. 3 0 400 0. . 500 6 0 . 0。
越
0 20 . 40 . 60 . 80 . 1 0 0.
t / ms
0
~
.
ll1 斟 s2 v t c西 m o2 B j
l 『 Is 一s i I 一 c ].∞ o h1 I l +s c o j
项目一四连杆机构运动仿真
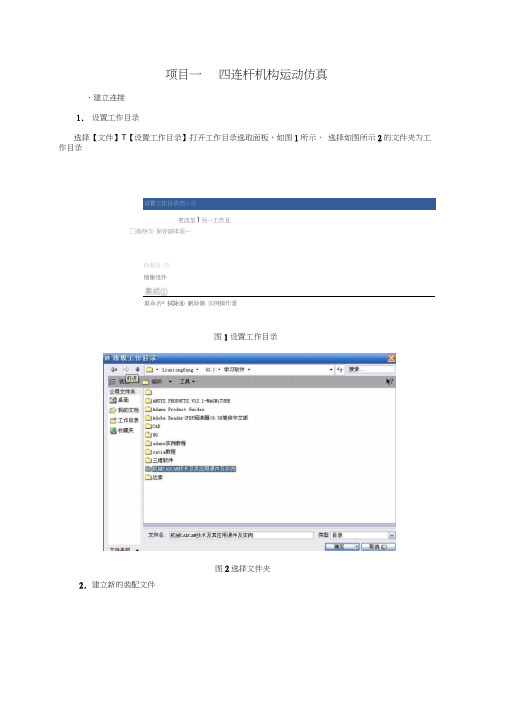
项目一四连杆机构运动仿真、建立连接1.设置工作目录选择【文件】T【设置工作目录】打开工作目录选取面板,如图1所示,选择如图所示2的文件夹为工作目录设置工作目录凹)小更改至1另一工作且□保存⑸ 保存副本⑥…負制目:苏镜像组件重命名® 拭除⑥ 删除側实例操作蛋图1设置工作目录图2选择文件夹2.建立新的装配文件打开PROE软件,点击’文件’,选择’新建’,有如下对话框弹出(如图3所示),在类型项选择‘组件’,子类型项选择‘设计’,名称改为‘ 2009109120',不使用缺省模板,点击’确定’。
有下对话框弹出(如图4所示),在模板中选择’mmns -asm -design 直接点击’确定’开始进入制图过程。
使用缺省欖板取消图3新建组件、装配文件绘件件造囹式告夬局记草零组制绘格报圏布标型送33也叵□□古----g ----子类型--- -------------- -- - —◎设计0校验工艺计划NC欖型欖具布局E工t.简化克示名称公■用名称2(X59109120确定「回新文件选项n图4选择单位1.机架的放置动仿真四连杆中Igrou nd.prt ,单击打开。
图5载入文件||曲-""^111• L二二■ JC在主界面出现一行任务栏 ,在’自动’选项中选择 A 離省丨,再在右边单击’ 八,如图6所示。
界面中出现一行任务栏,如图 7所示。
(1)进入PROE 的主界面,点击右下角图标记',有如下对话框弹出(如图5所示),选择运(2)再点击右下角图标选择运动仿真四连杆中 1-ground-prt, 单击’打开’,则在主图6机架1-2.曲柄的装配在单击右下角‘'在运动仿真四连杆中选择’2-cra nk-prt' ,单击’打开’。
在主界面出图7 机架2 用鼠标左键选择两平面对齐,如图8所示。
在选择两侧面对齐,在任务栏中选择,如图9所示,再单击右边'U:L JPT -▼口也・ JEfj - HftJW "1 " II XKE 醐■■: ; ■住图8平面对齐=对卉* £「二|云一op|t | X状态:部分约束图9侧面对齐申 fS;冒 rairM?12所示。
基于MATLAB的平面四连杆机构运动仿真.
图2~4分别为θ4角速度、点C的速度变化曲线。
4结论
本文在复数向量坐标系中推导了四连杆机构运动方程,并应用MATLAB软件进行了连杆机构运动数值仿真。从计算结果可以看出,该方法可以方便快捷地得到连杆运动参数,能够有效提高分析效率和计算精度,可进一步推广到多连杆机构设计及优化计算中。
文章编号:1009-9492(201104-0051-02
引言
四连杆机构因其结构灵活、能够传递动力并有效地实现预定动作,在很多领域得到了广泛应用
[1]
。进行连杆机
构运动分析,传统方法主要是图解法或分析法[2]
,无论设
计精度还是设计效率都相对低下,无法满足现代机械高速高精度的要求。随着计算机技术的飞速发展,特别是以
面四杆机构[J ].机械制造, 2002,
(3:26-28.
[3]周进雄,张陵.机构动态仿真[M ].西安:西安交通大学出
版社, 2002.
[4]李娟玲,张建峰.基于C语言的平面连杆机构的运动分析
[J ].机械研究与应用, 2006, 19(5:117-120.
[5]宋兆基. MATLAB6.5在科学计算中的应用[M ].北京:清
华大学出版社, 2005.
[6]王正林.精通MATLAB科学计算[M ].北京:电子工业出
版社, 2009.
[7]曹惟庆.机构设计[M ].北京:机械工业出版社, 2004. [8]李洪涛,徐巍华.基于MATLAB软件对抽油机连杆运动规律
的仿真研究[J ].机械工程师, 2009(5:99-101.
参考文献:
[1]孙桓,陈作模.机械原理[M ].北京:高等教育出版社,
2006.
基于Matlab和ADMAS的四杆机构运动仿真

2 M alb程 序 设 计 t a
当数 学 模 型 完 成 后 , 接 着 我 们 在 M 文 件 中 来 编 写 紧
() 2
则 A(C在 任 意 时刻 的 角度 为 : )
t ,一 td g , e / 8 1O
程 序 实 现平 面 四杆 机 构 的 运 动 轨 迹 仿 真 。
籀l卷 第9 O 划
2 1} 月 01 ‘ 9
软 件 导 刊
Sofw a eGui e t r d
Voll 0 9 0N Se . 0 1 p 2 l
基 于 Ma ta lb和 AD MAS 的 四杆 机 构 运 动 仿 真
周 展 张 钢 。 林 富 生 , ,
( ) 义 已 知 常 量 1定
1 — 20 m; 1 9r a
1 — 1O m : 2 lm 1 — 2O m : 3 5m 1 — 20 m: 4 4 r a
w 2= 2 p : 0 i
图 l 四 杆机 构 模 型
其 中 为 任 意 时刻 的 AOC的 弧 度 , 已知 常 量 。 是
1 3 AF、 一 AC b a O、 一 AC e AC, B、 — AD、 DC、 O 的 杆 C
由 此 可 得 任 意 时 刻 a点 的 运 动 轨 迹 坐 标 为 ( x a ) a ,y , 其中 :
a r 2* c s t ) o ( 2
a 一 r 2*s n( 2 i t)
(. 1 武汉 纺 织 大学 机 电工程 与 自动 化 学院 , 北 武汉 4 0 7 ; . 迪 电器 , 湖 30 32 港 湖北 武 汉 4 0 7 ) 3 0 1
摘 要 : 链 四杆 机 构 是 机 械 设 备 中 最基 本 的 机 构 类 型 之 一 , 它为 研 究对 象 建 立数 学 模 型 , 用 MA B编 程 与 铰 以 应 TI A
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
考虑运动副间隙的平面四杆机构动力学建模与仿真运动副间隙是指机构中的运动副在运动过程中存在的一种松动现象,导致副间隙。
由于副间隙的存在,机构的运动会产生滞后、虚位误差和振动等问题,影响机构的精度和稳定性。
在平面四杆机构中考虑运动副间隙的动力学建模与仿真可以通过以下步骤进行:
1. 建立机构的运动学模型:根据平面四杆机构的结构和运动副间隙的位置,确定机构的坐标系和杆件连接的几何关系。
通过运动学分析,可以得到机构中各杆件的位置、速度和加速度等运动参数。
2. 建立运动副间隙的数学模型:运动副间隙可以通过非线性弹簧-阻尼器模型进行建模。
通过测量和实验,得到间隙的特性曲线,如间隙随杆件位移的变化关系。
运用模型参数估计方法,可以得到间隙的数学模型。
3. 建立机构的动力学模型:根据机构的运动学模型和运动副间隙的数学模型,可以在拉格朗日动力学原理的基础上建立机构的动力学模型,即机构中各杆件的运动方程。
4. 进行仿真分析:利用动力学模型,进行仿真分析。
通过数值计算方法,求解机构的运动方程,可以得到机构的位移、速度和加速度等动力学性能指标。
5. 优化设计与控制:根据仿真结果,对机构进行优化设计和控制策略的选择,以减小运动副间隙的影响,提高机构的精度和稳定性。
总之,考虑运动副间隙的平面四杆机构动力学建模与仿真是一项复杂的任务,需要综合考虑机构的结构特点、运动学关系和动力学特性等因素,通过合理的建模和仿真分析,可以为机构的设计和控制提供科学依据。