考虑运动副间隙的双滑块机构运动分析
机械原理思考题(参考答案)

机械原理思考题一、选择题1、斜齿圆柱齿轮的标准模数和标准压力角在 B 上,计算几何尺寸需按 A 参数进行计算。
A .端面B .法面2、标准齿轮限制最少齿数的原因是 C 。
A .避免尺寸过大B .避免加工困难C .避免发生根切D .避免强度不足3、与其它机构相比,凸轮机构的最大优点是 A 。
A .容易使从动件得到各种预期的运动规律B .传动功率大、效率高C .制造方便,容易获得较高的精度D .从动件的行程可较大4、在由若干机器串联构成的机组中,若这些机器的效率均不相同,其中最高效率和最低效率分别为ηmax 和ηmin ,则机组的总效率η必有如下关系: A 。
A .η<ηminB .η>ηmaxC .ηmin ≤η≤ηmaxD .ηmin <η<ηmax 。
5、宽径比B/D ≥0.2的刚性转子要在 B 校正面内进行动平衡校正。
A .单个B .二个C .三个6、在机构中,某些不影响机构运动传递的重复部分所带入的约束为 B 。
A. 虚约束B. 局部自由度C. 复合铰链7、单转动副机械自锁的原因是驱动力 B 摩擦圆。
A. 切于B. 交于C. 远离8、对于双摇杆机构,最短杆与最长杆长度之和 B 大于其余两杆长度之和。
A. 一定B. 不一定C. 一定不9、设计凸轮廓线时,若减小凸轮的基圆半径,则凸轮压力角将 A 。
A. 增大B. 不变C. 减小10、在减速蜗杆传动中,用 C 来计算传动比是错误的。
A. 21ω=iB. 12z z i =C. 12d d i =11、在其他条件相同时,斜齿圆柱齿轮传动比直齿圆柱齿轮传动重合度 C 。
A. 小B. 相等C. 大12、棘轮机构中采用了止回棘爪主要是为了 A 。
A. 防止棘轮反转B. 保证棘轮每次转过相同角度C. 对棘轮双向定位13、利用飞轮进行调速的原因是它能 C 能量。
A. 产生B. 消耗C. 储存和放出14、曲柄滑块机构利用 B 可演化为偏心轮机构。
A、机架变换B、改变构件相对长度C、移动副取代回转副D、扩大回转副15、渐开线齿轮的齿顶圆压力角αa C 分度圆压力角α。
机械原理课后全部习题答案
机械原理课后全部习题答案目录第1章绪论 (1)第2章平面机构的结构分析 (3)第3章平面连杆机构 (8)第4章凸轮机构及其设计 (15)第5章齿轮机构 (19)第6章轮系及其设计 (26)第8章机械运动力学方程 (32)第9章平面机构的平衡 (39)第一章绪论一、补充题1、复习思考题1)、机器应具有什么特征?机器通常由哪三部分组成?各部分的功能是什么?2)、机器与机构有什么异同点?3)、什么叫构件?什么叫零件?什么叫通用零件和专用零件?试各举二个实例。
4)、设计机器时应满足哪些基本要求?试选取一台机器,分析设计时应满足的基本要求。
2、填空题1)、机器或机构,都是由组合而成的。
2)、机器或机构的之间,具有确定的相对运动。
3)、机器可以用来人的劳动,完成有用的。
4)、组成机构、并且相互间能作的物体,叫做构件。
5)、从运动的角度看,机构的主要功用在于运动或运动的形式。
6)、构件是机器的单元。
零件是机器的单元。
7)、机器的工作部分须完成机器的动作,且处于整个传动的。
8)、机器的传动部分是把原动部分的运动和功率传递给工作部分的。
9)、构件之间具有的相对运动,并能完成的机械功或实现能量转换的的组合,叫机器。
3、判断题1)、构件都是可动的。
()2)、机器的传动部分都是机构。
()3)、互相之间能作相对运动的物件是构件。
()4)、只从运动方面讲,机构是具有确定相对运动构件的组合。
()5)、机构的作用,只是传递或转换运动的形式。
()6)、机器是构件之间具有确定的相对运动,并能完成有用的机械功或实现能量转换的构件的组合。
()7)、机构中的主动件和被动件,都是构件。
()2 填空题答案1)、构件 2)、构件 3)、代替机械功 4)、相对运动 5)、传递转换6)、运动制造 7)、预定终端 8)、中间环节 9)、确定有用构件3判断题答案1)、√ 2)、√ 3)、√ 4)、√ 5)、× 6)、√ 7)、√第二章 机构的结构分析2-7 是试指出图2-26中直接接触的构件所构成的运动副的名称。
机械原理自测题及答案
第二章 机构的结构分析一.填空题1.组成机构的基本要素是 和 。
机构具有确定运动的条件是: 。
2.在平面机构中,每一个高副引入 个约束,每一个低副引入 个约束,所以平面机构自由度的计算公式为F = 。
应用该公式时,应注意的事项是: 。
3.机构中各构件都应有确定的运动,但必须满足的条件是: 。
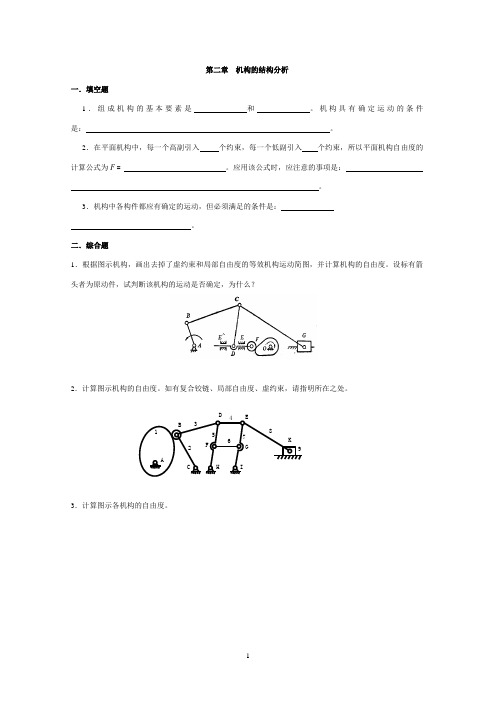
二.综合题1.根据图示机构,画出去掉了虚约束和局部自由度的等效机构运动简图,并计算机构的自由度。
设标有箭头者为原动件,试判断该机构的运动是否确定,为什么?2.计算图示机构的自由度。
如有复合铰链、局部自由度、虚约束,请指明所在之处。
3.计算图示各机构的自由度。
ADE CHG FIBK1234567894.计算机构的自由度,并进行机构的结构分析,将其基本杆组拆分出来,指出各个基本杆组的级别以及机构的级别。
(a)(b)5.计算机构的自由度,并分析组成此机构的基本杆组。
如果在该机构中改选FG为原动件,试问组成此机构的基本杆组是否发生变化。
6.试验算图示机构的运动是否确定。
如机构运动不确定请提出其具有确定运动的修改方案。
(a)(b)第三章平面机构的运动分析一、综合题1、试求图示各机构在图示位置时全部瞬心的位置(用符号ij P直接在图上标出)。
2、已知图示机构的输入角速度ω1,试用瞬心法求机构的输出速度ω3。
要求画出相应的瞬心,写出ω3的表达式,并标明方向。
3、在图示的齿轮--连杆组合机构中,试用瞬心法求齿轮1与3的传动比ω1/ω2。
4、在图示的四杆机构中,AB l =60mm, CD l =90mm, AD l =BC l =120mm, 2ω=10rad/s ,试用瞬心法求:(1)当ϕ=165°时,点C 的速度c v ;(2)当ϕ=165°时,构件3的BC 线上速度最小的一点E 的位置及其速度的大小; (3)当0c v =时,ϕ角之值(有两个解)。
5、如图为一速度多边形,请标出矢量AB v 、BC v 、CA v 及矢量A v 、B v 、C v 的方向?6、已知图示机构各构件的尺寸,构件1以匀角速度ω1转动,机构在图示位置时的速度和加速度多边形如图b)、c) 所示。
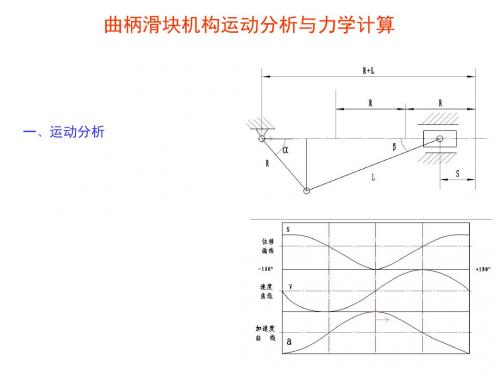
曲柄滑块机构运动分析与力学计算.
c os 1 s in 2 1 2 s in 2
1 1 2 s in 2
2
s in 2 1 (1 c os 2 )
2
c os 1 1 2 (1 c os 2 )
4
S R(1 c os ) L 1 2 (1 c os 2 )
m
f
四、连杆的校验
M PAB RB PAB sin X 压弯组合
c
PAB
c os F
M W
PAB cos PAB RB PAB sin X
F
W
c
1 2
s in
2
a dV dt
dV
d
d
dt
2 R(c os c os 2 )
二、曲轴扭矩理论计算
P
PAB c os
M1 PAB m1
m1 R sin
M1 PAB R sin( )
sin( ) sin cos cos sin sin 1 2 sin 2 sin cos
PAB
P
cos
cos
由于在下死点附近,,很小
M 2 PAB RA R0 R sin PAB P
当 0, 0
M 2 PRA R0 R sin
P R A
R0
RRA
P
Pg公称压力; g公称压力行程
按压力行程计算扭矩作活塞 允许载荷曲线,在任何情况下
机械原理复习题第2章机构的结构分析
4
ω1 1
5 3
2
2
题9图
• • • •
解: F=3n-(2pL+pH)=3×4-2×6=0 或F=3n-(2pL+pH-p')-F′ =3×4-(2×7+0-2)-0=0 此方案有结构组成原理的错误。因为它 的自由度为零,不能运动。 • 修改方案如答图a、b所示。
• 例题2 图示为毛纺设备洗毛机中所采用的双 重偏心轮机构,偏心轮1可以在偏心轮2中相 对转动,偏心轮2可以在构件3的圆环中相对 转动。⑴试绘制其在图示位置时的机构运动 简图;⑵当以偏心盘1为原动件时,该机构是 否有确定的运动?
B 3 3 1 O A B
2
O΄
O 1 2 A
O΄
题2图
题答图
• 解 在绘制机构运动简图时,首先必须搞清 机构的组成及运动传递情况。在图示机构中, 偏心盘1为原动件,其与机架构成转动副A; 偏心盘1与偏心盘2构成转动副O;偏心盘2 与带环的构件3构成转动副O΄;构件3与机 架组成转动副B。 • 根据上述分析,再选定一适当的比例尺和视 图平面,并依次定出各转动副的位置。就不 难画出其机构运动简图,如答图所示。
O 1 A
O A 1 2
3 B 题4图
4
2
3
B
题答图
• 解 在绘制机构运动简图时,首先必须搞
清机构的组成及运动传递情况。在图示
机构中,偏心盘1为原动件,其与机架4
构成转动副O;偏心盘1与构件2构成转
动副A;构件2与滑块3构成转动副B;滑
块3与机架4组成移动副,其相对移动方
向沿OB方向。
• 根据上述分析,再选定一适当的比例尺和 视图平面,并依次定出各转动副的位置和 移动副导路的方位。就不难画出其机构运 动简图,如答图所示。 • 由于该机构具有3个活动构件、3个转动副 和1个移动副,没有高副,没有局部自由 度和虚约束,故机构的自由度为 O1 A • F=3n-(2pL+pH) OA 2 • =3×3-(2×4+0) 1 2 3B • =1
机械原理第2、3、4、6章课后答案西北工业大学(第七版)

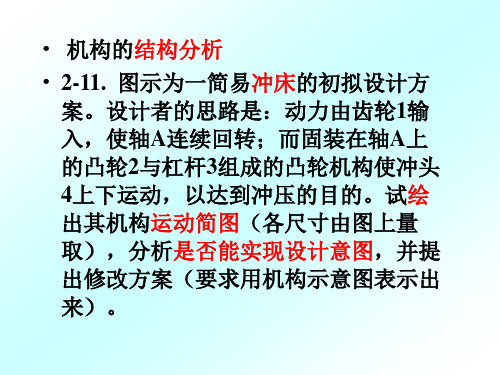
第二章 机构的结构分析题2-11 图a 所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-11a)2)要分析是否能实现设计意图,首先要计算机构的自由度。
尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A 上,只能作为一个活动件,故 3=n 3=l p 1=h p01423323=-⨯-⨯=--=h l p p n F原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-11b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-11c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-11d)。
11(c)题2-11(d)5364(a)5325215436426(b)321讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b )(c )所示,这样就相当于给机构增加了一个自由度。
用一个高副代替一个低副也可以增加机构自由度,如图2-1(d )所示。
题2-12 图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。
机械原理复习题2.
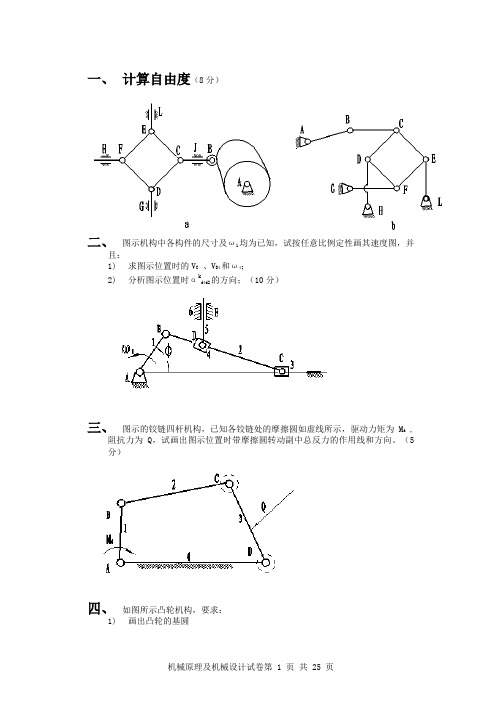
一、计算自由度(8分)二、图示机构中各构件的尺寸及ω1均为已知,试按任意比例定性画其速度图,并且:1)求图示位置时的V C、V D4和ω4;2)分析图示位置时αk d4d2的方向;(10分)三、图示的铰链四杆机构,已知各铰链处的摩擦圆如虚线所示,驱动力矩为M d ,阻抗力为Q,试画出图示位置时带摩擦圆转动副中总反力的作用线和方向。
(5分)四、如图所示凸轮机构,要求:1)画出凸轮的基圆2)画出从升程开始到图示位置时推杆的位移s,相对应的凸轮转角φ,B点的压力角α;(8分)五、计算题在图示机构中,已知各直齿圆柱齿轮模数均为m=2mm,z1 =15,z2=32,z2´=20,z3 =30,要求齿轮1、3同轴线。
试问:1)齿轮1、2和齿轮2´、3应选什麽传动类型最好?为什麽?2)齿轮1、2改变为斜齿轮传动来凑中心距,当齿数不变,模数不变时,斜齿轮的螺旋角为多少?3)若用范成法来加工齿数z1=15的斜齿轮1时,是否会产生根切?(14分)七、简答题:(20分)1.转动副的自锁条件是什麽?螺旋副的自锁条件是什麽?2.在曲柄摇杆机构中,当以曲柄为原动件时,机构是否一定存在急回运动,为什麽?3.若凸轮是以逆时针转动,采用偏置直动推杆时,推杆的导路应偏置于回转中心的哪一侧较合理?为什麽?4.外啮合斜齿圆柱齿轮的正确啮合条件是什麽?5.变位齿轮的分度圆、基圆、周节和基节大小都发生变化了吗?为什麽?6.压力角为15º的齿条(模数可为非标准值)能否与压力角为20º(标准模数)的齿轮正确啮合?为什麽?7.i H GK是不是周转轮系中G、K两轮的传动比?为什麽?8.槽轮机构运动特性系数k的取值范围是什麽?9. 双万向铰链机构传动比恒为1的条件是什麽?10. 什麽是机构稳定运转状态下的周期性速度波动,如何进行调节?一. 选择与填空(本题共12小题,选择题每小题2分,填空题每空1分,满分27分) (1)设图示回转体的材料均匀,制造精确,安装正确,当它绕AA 轴线回转时是处于 状态。
西南交通大学机械原理课后习题答案

机械原理习题解答1.绘制题1图所示液压泵机构的机构运动简图。
解:该机构由机架1、原动件2和从动件3、4组成,共4个构件,属于平面四杆机构。
机构中构件1、2,构件2、3,构件4、1之间的相对运动为转动,即两构件间形成转动副,转动副中心分别位于A、B、C点处;构件3、4之间的相对运动为移动,即两构件间形成移动副,移动副导路方向与构件3的中心线平行。
构件1的运动尺寸为A、C两点间距离,构件2的运动尺寸为A、B两点之间的距离,构件3从B点出发,沿移动副导路方向与构件4在C点形成移动副,构件4同时又在C点与构件1形成转动副。
选择与各构件运动平面平行的平面作为绘制机构运动简图的视图平面。
选择比例尺μ=0.001m/mm,分别量出各构件的运动尺寸,绘出机构运动简图,并标明l题2图简易冲床机构lμ=0.001m/mm原动件及其转动方向,如题1图所示。
2.绘制题2图所示简易冲床的机构运动简图。
解:图示机构中已标明原动件,构件6为机架,其余构件为从动件。
需要注意的是,在区分构件时应正确判断图中各构件都包括哪些部分,例如:构件3就包括两部分,如图所示。
该机构中构件1与机架以转动副连接,转动副中心位于固定轴的几何中心A点处;构件2除与构件1形成回转中心位于C点的转动副外,又与构件3形成移动副,移动副导路沿BC 方向;构件3也绕固定轴上一点B 转动,即构件3与机架形成的转动副位于B 点,同时构件3与构件2形成移动副,又与构件4形成中心位于D 点的转动副;构件4与构件5形成中心位于E 点的转动副;构件5与机架6形成沿垂直方向的移动副。
该机构属于平面机构,因此选择与各构件运动平面平行的平面作为绘制机构运动简图的视图平面。
选择比例尺l μ=0.001m/mm ,量出各构件的运动尺寸,绘出机构运动简图,并标明原动件及其转动方向,如题2图所示。
3. 题3图为外科手术用剪刀。
其中弹簧的作用是保持剪刀口张开,并且便于医生单手操作。
忽略弹簧,并以构件1为机架,分析机构的工作原理,画出机构的示意图,写出机构的关联矩阵和邻接矩阵,并说明机构的类型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
考虑运动副间隙的双滑块机构运动分析罗阿妮;邓宗全;刘荣强;刘贺平【摘要】A kind of root lock mechanism with a space deployable mast in a space probe was analyzed and simplified into a kind of mechanism with two sliders and a spring. First, using the vibration analysis method, movement of the mechanism was studied to obtain an expression of the ideal movement of the #2 slider. Then, mathematical models of backlash in movement pairs were analyzed. Kinetic equations of components of the mechanism were set up according to analysis of forces on them. At last, mathematical simulation was applied to check the correctness of theory analysis and effects of pair backlash on movement precision. It was concluded that matching precisions at different positions have different influence on movement precision of the mechanism. Improving matching precision of pairs and hinge on the #2 slider can heighten movement precision of the mechanism, but the same is not true for the #1 slider. The analysis can analyze the influence of movement pairs on movement of a mechanism and make reasonable matching precisions in order to decrease the cost of manufacturing.%针对一种航天器上伸展臂的根部锁紧机构,通过分析将其简化为一种带弹簧的双滑块机构.根据此机构的运动分析,利用振动分析方法,获得了理想状态下滑块2的位移表达式.通过对铰链和移动副间隙数学模型的分析,结合各构件的受力分析,获得了机构中各构件的动力学方程.通过仿真来验证理论分析的正确性和各运动副间隙对机构运动精青度的影响.得出结论:不同位置的配合精度对机构的运动精度影响是不同的,提高滑块2上铰链和移动副的配合精度可以显著提高机构运动精度,而滑块1与其他构件的配合精度对机构运动精度影响较小.该分析方法能够确定各运动副间隙对机构运动的影响,有利于构件间配合精度的选择和减小制造加工成本.【期刊名称】《哈尔滨工程大学学报》【年(卷),期】2011(032)003【总页数】6页(P355-360)【关键词】伸展臂;双滑块机构;间隙;振动【作者】罗阿妮;邓宗全;刘荣强;刘贺平【作者单位】哈尔滨工程大学,机电工程学院,黑龙江,哈尔滨,150001;哈尔滨工业大学,机电学院,黑龙江,哈尔滨,150001;哈尔滨工业大学,机电学院,黑龙江,哈尔滨,150001;哈尔滨工业大学,机电学院,黑龙江,哈尔滨,150001;哈尔滨工程大学,机电工程学院,黑龙江,哈尔滨,150001【正文语种】中文【中图分类】TH122航天机构的运动精度要求都是很高的,而构件的配合精度对运动精度有直接的影响[1].构件的配合精度受到加工和安装等方面的影响,提高配合精度会大大增加制造成本[2-3].因此,分析各运动副的配合精度对机构运动精度的影响,确定主要影响因素,减小提高配合精度范围是十分必要的.目前,间隙机构的数学模型有二状态模型、三状态模型和连续接触模型,这里采用二状态模型,即接触-分离模型,来对机构间隙进行建模研究[4-5].1 空间一维伸展臂工作原理ADAM伸展臂于2000年NASA在进行SRTM (shuttle radar topography mission)项目时作为合成孔径雷达的支撑构件,其结构组成的二维剖面如图1所示.下面简要介绍其结构组成及伸展臂杆单元的工作原理.如图1所示,伸展臂完全收拢状态放置在承载筒内.伸展臂由承载筒和伸展单元2部分组成.承载筒按照其功能可以划分为3段,图1中从左向右依次为:装载段、消旋段、提升段.装载段用来容纳收拢状态的伸展臂,由布置在圆筒内的8条直轨道组成;消旋段用来把收拢状态的伸展臂单元展开成具有良好刚性的空间立方体,由8条布置在圆筒内壁的消旋轨道形成;提升段是整个伸展臂展开、收拢的动力源,由螺旋提升筒和4条直轨道组成,在电机的带动下通过传动机构使得螺旋筒转动从而带动伸展臂沿直轨道实现提升或收拢.伸展臂完全收拢在承载筒后由均布在筒内的4条压紧杆实现其轴向定位.伸展臂完全展开后由其根部的锁紧机构实现伸展臂与承载筒的定位锁紧功能.图1 伸展臂结构组成Fig.1 Structure of the deploy and retract mast图2为空间伸展臂根部的锁紧机构地面试验装置的机构简图.此锁紧机构安装在空间伸展臂上,随着伸展臂向上运动.当此机构运动到图示位置时,即轨道7与锁定孔8(安装于机架上)相对,轨道6与7被机架上的相应结构挡住,不能向上运动,这时只有滑块1随着此伸展臂向上运动.滑块2在滑块1的驱动下沿着轨道7向左运动.当滑块2运动到一定距离后,它就插入到孔8中.当滑块1运动到与轨道7所在的直线上时,伸展臂停止,滑块2插入到孔8的深度最深,从而空间伸展臂被滑块2锁定在当前位置.但是由于结构方面的精度和控制方面的可靠性等问题,伸展臂停止的位移未必精确.因此,滑块1的停止位置会有偏差,这样滑块2不能完全插入孔8中,从而空间伸展臂不能被完全锁紧.因此滑块1、2的连接采用连杆4、5和弹簧3的方式,这样在滑块1没有运动到轨道7所在的直线上时滑块2就可以在弹力的作用下完全插入孔8中,滑块1停止的位置有所偏差也不会影响锁紧. 图2 锁紧机构简图Fig.2 Sketch of lock mechanism根据此锁紧机构的功能和动作的分析,其机构运动简图如图3所示.由图3可以看出,此机构能够被简化为一个带有弹簧的双滑块机构.图3 机构运动简图Fig.3 Sketch of the bi-slide flex link mechanism2 机构运动分析在图3所示机构位置,轨道6、7与机架固定,滑块1在运动机构的驱动下匀速直线运动,而滑块2在滑块1的驱动下水平向左运动.首先,不考虑间隙和连杆变形的理想状态下分析其他各构件运动.在局部坐标系Osxsys中,xs轴始终与连杆的轴线重合.这里,设mi(i=1,2,3,4,5)为构件i的质量,F3为弹簧产生的弹力,f为滑块与轨道的摩擦系数,Lj(j=4,5)为构件j的长度,S为滑块2在y轴上的位移.因此,滑块2和连杆5在局部坐标系中的振动方程为式中:xs为滑块2和连杆5沿着局部坐标系中的xs轴的位移,c为与速度相关的阻尼系数,k为弹簧的弹性系数,Q为振动体在轴向受到的外力[6].根据振动体的受力[7],可得对方程求解,得到滑块2在局部坐标系中的位移.由于整体坐标系与局部坐标系之间的坐标变换矩阵为经过坐标变换,就可以获得滑块2在整体坐标系中的位移:式中:H1、S1为Δt时间间隔前滑块1和2的位移,S2为Δt时间间隔后滑块2的位移.3 间隙的数学模型的建立图4所示为铰链的孔与销,设铰链间存在间隙值为r,在运动过程中,当铰链的孔与销的中心的距离大于等于r时,构成铰链的2个构件会发生碰撞.2个构件碰撞时的相互作用力可以利用非线性弹簧-阻尼的形式来描述,即式中,δ为2个构件接触时法向的变形量,Fn为法向碰撞力,kj、cj1和cj2分别为2个构件的接触刚度、法向阻尼系数和切向阻尼系数,Ft为切向碰撞力,f为两构件的摩擦系数,vt为2个构件的切向相对速度[8-9].设O1为滑块1上的销轴中心,O2为构件4上孔的中心.考虑铰链间隙时,就要增加2个坐标和1个夹角,即(xO1,yO1)、(xO2,yO2)和夹角θ.图4 铰链示意Fig.4 Sketch map of joint设由此来判断2个构件是否接触,是否有碰撞力的作用.图5 移动副示意Fig.5 Sketch map of slider图5为移动副示意图,设滑块垂直于移动方向的位移为xL1,导轨垂直于移动方向的位移为xL2,设移动副的间隙为r',则碰撞力的计算公式与式(2)相同[10].4 考虑间隙时机构运动分析本文认为滑块1和连杆4连接的铰链、连杆5和滑块2连接的铰链、滑块2和导轨连接的移动副存在间隙.设xi和yi(i=1,2,4,5)为构件i的平动位移,βj(j=4,5)为连杆j绕铰链中心的转动角位移,Fnij、Ftij和θij(i=1,2和j=4,5)分别为构件i和j构成的铰链在碰撞时的法向力、切向力和两中心连线的偏角,FNi和FTi(i=1,2)为滑块i与导轨间碰撞时的法向力和切向力,FN45为连杆4和5的法向作用力,Ji(i=4,5)为连杆i绕铰链中心的转动惯量[11].根据滑块2的受力,建立滑块2在x和y方向的动力学方程.当滑块2的铰链和移动副都发生碰撞时,各碰撞力的方向由具体的位置决定.当铰链或移动副不接触时,相应的碰撞力为0.这样通过初始条件,可以求出较小时间间隔后的滑块2的加速度,再通过运动学公式求出相应的位移S和速度S·[12].当铰链中2个构件接触时,连杆4的动力学方程为因为β4=90°-α,因此当铰链中2个构件不接触时,上面的动力学方程中相应的碰撞力为零,即可得到此状态时连杆4的动力学方程.按照初始条件和运动学方程,可进一步得到连杆4在迭代时间间隔后相应的位移和速度.利用相同方法,也可求出连杆5的位移和速度.5 仿真分析根据前面的分析获得的数学模型,利用Matlab软件,编写程序,获得运动参数的分析结果.令弹簧刚度k=0.5 N/mm,迭代时间间隔Δt=0.001 s,孔8最深处距离整体坐标系原点0.45 m.在初始状态,滑块1的位移为 H0=0.4 m,滑块2的位移为S0=0.3 m,滑块1匀速运动,其速度为-1 m/s,滑块2静止,弹簧的弹力为0,kj=7.15×10-4N/mm,cj1=0.175 N·s/mm,cj2=0,摩擦系数都为0.05,运动副的最大间隙值都取0.1 mm.图6 两滑块位移曲线Fig.6 Displacement curves of two sliders在图6中,滑块1匀速运动,因此其位移曲线为一条斜线.滑块2首先由初始位置按照一定的曲线规律运动到孔8的最深处,由于2具有一定的速度,所以滑块2与孔8发生碰撞.应力波在滑块2中往复运动一次后,滑块2以碰撞时具有的速度反向向后运动.由于弹簧给滑块2和连杆5的弹力是向左的(图3所示),所以滑块2在碰撞后,水平向左减速运动一段距离,而后再向右运动,与孔8再次碰撞.滑块2按照这一规律运动一段时间后,滑块1运动到H=-0.1这一位置停止,滑块2稍后也达到了平衡.滑块2处铰链存在间隙时,滑块2的中心在x、y方向的误差值如图7所示.由图可知,x方向误差值以间隙值为中心波动,y方向误差值以0为中心往复振动,二者最终都收敛于各自的平衡点.由于滑块2的重力始终沿x正方向,所以其波动中心偏于正方向.而滑块2在y方向上受力随着运动而变化,没有方向固定的力作用,所以收敛点为0.因此,当此系统平衡时,在重力的作用下,铰链的销和孔的顶点接触.图8为此间隙处的碰撞力,最大值约为18 N.图7 滑块2的铰链间隙位移曲线Fig.7 Displacement curves of sliders 2 clearance图8 滑块2的铰链间隙碰撞力Fig.8 Force curves of sliders 2 backlash图9和图10分别为滑块2在x方向和y方向的误差变化曲线.通过改变各处间隙值可知,滑块1带动整个系统运动,因此滑块1的铰链中两构件主要处于接触状态,振动幅度较小.滑块与导轨间隙可以限制滑块2在x方向(即垂直于滑块2导路)的振动幅度,滑块2铰链间隙处的振动对x方向误差影响最大.滑块2的间隙对滑块2的y方向位移误差起决定作用,通过提高滑块2和连杆5的配合精度、减小滑块2和导轨的间隙值可以减小滑块2的运动误差、提高其运动精度,因此这两处的配合精度要高.而滑块1处铰链的误差值对滑块2的运动影响较小,此处的配合精度可以低些.由于间隙存在而产生的碰撞,使得机构中各构件受到碰撞力的影响.碰撞力会引起构件的弹性变形,连杆的受力变形量要比滑块的大得多,碰撞力会通过使连杆变形而影响滑块2的运动精度.但是碰撞力的作用时间短,而且2个连杆通过弹簧连接,连杆一端的连接具有一定的柔性,因此碰撞力对连杆的轴向变形影响很小.2个连杆的连接处的导向长度较长,限制了连杆的横向(垂直于轴线方向)变形,因此碰撞力对连杆的横向变形的影响也很小.这也是弹簧系统改善机构受力状况的优势体现. 图9 滑块2在x方向的误差曲线Fig.9 x direction clearance of slider 2图10 滑块2在y方向的误差曲线Fig.10 y direction clearance of slider 26 结论通过空间伸展臂的根部锁紧机构运动的理论研究和仿真分析,得到如下结论:1)在此机构中,滑块2上的移动副和铰链间隙对滑块2的运动影响最大,提高这2个运动副的配合精度,能够显著地减小滑块2的运动误差.2)间隙存在,碰撞力就存在.碰撞力的数值都较大,因此完全作用在机构上,会使构件产生大的弹性变形而影响机构运动精度.而弹簧使构件柔性连接,缓解了碰撞力对构件的影响,对机构的强度和运动都有利.这样的分析,确定了机构各运动副的配合精度对机构运动精度的影响.根据分析结果,对各配合精度进行正确选择,可以减小加工成本.参考文献:【相关文献】[1]牛治永,王三民,王磊.空间桁架可展天线三向索网预张力多目标优化[J].机械科学与技术,2009,28(3):330-335.NIU Zhiyong,WANG Sanmin,WANG Lei.Multiobjective optimization of the pretensioning force in the tri-directional cable net of an astromesh deployable reflector [J].Mechanical Science and Technology for Aerospace Engineering,2009,28(3):330-335.[2]李团结,张琰,李涛.周边桁架可展天线展开过程动力学分析及控制[J].航空学报,2009,30(3):444-449.LI Tuanjie,ZHANG Yan,LI Tao.Deployment dynamic analysis and control of hoop truss deployable antenna[J].Acta Aeronautica et Astronautica Sinica,2009,30(3):444-449. [3]娄振,王三民,郭家舜.可展天线臂与卫星间耦合振动特性研究[J].机械科学与技术,2009,28(9):1208-1212.LOU Zhen,WANG Sanmin,GUO Jiashun.On characteristics of deployable antenna mast and satellite coupled vibration[J].Mechanical Science and Technology for Aerospace Engineering,2009,28(9):1208-1212.[4]肖薇薇,陈务军,付功义.空间充气可展抛物面天线反射面设计与精度分析[J].哈尔滨工程大学学报,2010,31 (2):257-261.XIAO Weiwei,CHEN Wujun,FU Gongyi.Analysis of the design and precision of an inflatable deployable parabolic reflector space antenna[J].Journal of Harbin Engineering University,2010,31(2):257-261.[5]关富玲,刘亮.四面体构架式可展天线展开过程控制及测试[J].工程设计学报,2010,17(5):381-387.GUAN Fuling,LIU Liang.Deployment control and test of deployable tetrahedral truss antenna[J].Journal of Engineering Design,2010,17(5):381-387.[6]杨玉龙,关富玲.可展桁架天线形面精度理论分析[J].空间科学学报,2009,29(5):529-533.YANG Yulong,GUAN Fuling.Theoretical analysis of surface error for deployable truss antenna[J].Chinese Journal of Space Science,2009,29(5):529-533.[7]BAI Zhengfeng,TIAN Hao,ZHAO Yang.Dynamics modeling and simulation of mechanism with joint clearance[J].Journal of Harbin Institute of Technology,2010,17(5): 706-710.[8]李发展,张艳,卢章平.考虑运动副间隙的平面五杆机构轨迹优化[J].组合机床与自动化加工技术,2010(4): 44-46.LI Fazhan,ZHANG Yan,LU Zhangping.Trajectory optimization for planar five-bar mechanism having joints with clearances[J].Modular Machine Tool&Automatic Manufacturing Technique,2010(4):44-46.[9]徐长密,常宗瑜,李捷,于鹏.基于单边接触模型的含间隙槽轮机构动力学分析[J].机械设计,2010,27(2):50-53.XU Changmi,CHANG Zongyu,LI Jie,YU Peng.Dynamics analysis for Genevamechanism containing clearances based on unilateral contact model[J].Journal of Machine Design,2010,27(2):50-53.[10]张劲夫,张毅,和兴锁.计入材料阻尼的平面柔性连杆机器人的动力学建模和计算[J].机械传动,2006,30 (5):24-27,30.ZHANG Jinfu,ZHANG Yi,HE Xingsuo.Dynamics modeling and calculation of planar flexible multi-link manipulators with material damping[J].Journal of Mechanical Transmission,2006,30(5):24-27,30.[11]刘柏希,原大宁,刘宏昭,等.五参量结构阻尼模型及其在弹性机构动力学中的应用[J].机械工程学报,2005,41(8):136-139.LIU Baixi,YUAN Daning,LIU Hongzhao,et al.Five parameters structural damping model and its application in elastic mechanism dyanmics[J].Chinese Journal of Mechanical Engineering,2005,41(8):136-139.[12]兰朋,陆念力,丁庆勇,孙立宁.精确运动弹性动力学分析方法的显式表达[J].南京理工大学学报:自然科学版,2005,29(2):153-157.LAN Peng,LU Nianli,DING Qingyong,SUN Lining.Explicit expression for precise kineto-elastodynamic analysis[J].Journal of Nanjing University of Science and Technology,2005,29(2):153-157.[13]王国庆,王帑.考虑碰撞和阻尼的弹性机构动力学分析[J].长安大学学报:自然科学版,2008,28(4):99-102.WANG Guoqing,WANG Tang.Dynamics of elastic mechanism considering contact and damping[J].Journal of Chang'an University:Natural Science Edition,2008,28 (4):99-102.。