卫星星历
GPS名词解释
GPS名词解释(定位星座)在用GPS卫星进行导航定位时,为了求得测站的三维位置,必须观测4颗GPS卫星,称之为定位星座。
(卫星定位常用的坐标系)空间直角坐标系及其相应的大地坐标系(卫星星历)就是一组对应于某一时刻的轨道参数及其变率。
包括广播星历和后处理星历(gps定位的实质)利用三颗以上卫星的一直空间位置和其到用户接收机的位置通过后方交会得到用户接收机位置的三维坐标(岁差)地球的形体接近于一个赤道隆起的椭球体,因此,在日月引力和其它天体引力对地球隆起部分的作用下,地球在绕太阳运行时,自转轴的方向不再保持不变,从而使春分点在赤道上产生缓慢的西移,这种现象在天文学中称为岁差。
(章动)在太阳和其它行星引力的影响下,月球的运行轨道以及月地之间的距离都是不断变化的,那么在日月引力等因素的影响下,瞬时北天极将绕瞬时平北天极产生旋转,大致成椭圆形轨迹,其长半径约为9.2",周期约为18.6年。
这种现象称为章动。
(协议天球坐标系)为了建立一个与惯性坐标系相接近的坐标系,人们通常选择某一时刻t0作为标准历元(epoch),并将此时刻地球瞬时自转轴(指向北极)和地心至瞬时春分点的方向,经该时刻的岁差和章动改正后,分别作为Z轴和X轴的指向。
由此所构成的空固坐标系,称为所取标推历元t0的平天球坐标系或协议天球坐标系,也称协议惯性坐标系(整周未知数)因为载波信号是一种周期性的正弦信号,而相位测量只能测得其不足一个波长的不分,因此存在着整周数不确定的问题(周跳)在gps跟踪卫星过程中卫星信号被障碍物遮挡而暂时中断或受无线电干扰造成失锁,计数器无法正常计数,当信号重新被跟踪后,整周计数就不确定可是不到一个整周的相位观测值仍是正确的。
(单点定位)又叫绝对定位,即利用gps卫星和接收机之间的距离观测值直接确定用户接收机在wgs84坐标系的坐标(相对定位)用至少二台gps接收机同步观测相同的卫星,确定接收机天线之间的相对位置(精度因子)权系数阵对角线上的元素定义为精度因子。
GPS(卫星信号)
为子码X2的延迟参数,规定 P(t ) X 1 (t ) X 2 (t ni p ) n 取区间[0,36]的正整数。当n 取
i i
Nu=212-1=2.35×1014bit
0、1、2、…36时,就构成37 个平移等价的P码。
码元宽度 由于钟脉冲频率f1=f0=10.23MHZ, 周期 Tu=Nu×tu=267d
苏州科技学院空间信息与测绘工程系gps卫星星历卫星坐标计算toe星历表参考历元秒iodeaode星历表数据量m0按参考历元toe计算的平近点角弧度n由精密星历计算得到的卫星平均角速度与按给定参数计算所得的平均角速度之差弧度e轨道第一偏心率n轨道长半径的平方根电文中给出的gps卫星轨道参数是对应于参考历元toe对于某观测历元t必须确定其相对于参考历元的时间差值tgps卫星星历卫星坐标计算toe星历表参考历元秒iodeaode星历表数据量m0按参考历元toe计算的平近点角弧度n由精密星历计算得到的卫星平均角速度与按给定参数计算所得的平均角速度之差弧度e轨道第一偏心率n轨道长半径的平方根iiii升交点近地点参考时刻nt苏州科技学院空间信息与测绘工程系gps卫星星历卫星坐标计算toe星历表参考历元秒iodeaode星历表数据量m0按参考历元toe计算的平近点角弧度n由精密星历计算得到的卫星平均角速度与按给定参数计算所得的平均角速度之差弧度e轨道第一偏心率n轨道长半径的平方根4计算观测时刻的卫星偏近点角苏州科技学院空间信息与测绘工程系gps卫星星历卫星坐标计算toe星历表参考历元秒iodeaode星历表数据量m0按参考历元toe计算的平近点角弧度n由精密星历计算得到的卫星平均角速度与按给定参数计算所得的平均角速度之差弧度e轨道第一偏心率n轨道长半径的平方根coscosgps卫星星历卫星坐标计算0按参考历元toe计算的升交点赤径弧度i0按参考历元toe计算的轨道倾角弧度近地点角距弧度升交点赤径变化率弧度iiii升交点参考时刻近地点观测时刻根据观测时刻的卫星真近点角和近地点角距进行计算苏州科技学院空间信息与测绘工程系gps卫星星历卫星坐标计算cuc升交矩角的余弦调和项改正的振幅弧度cus升交矩角的正弦调和项改正的振幅弧度crc卫星矢径的余弦调和项改正的振幅米crs卫星矢径的正弦调和项改正的振幅米cic轨道倾角的余弦调和项改正的振幅弧度cis轨道倾角的正弦调和项改正的振幅弧度7计算摄动改正项分别表示升角距角卫星矢径和轨道面倾角的摄动改coscos0按参考历元toe计算的升交点赤径弧度i0按参考历元toe计算的轨道倾角弧度近地点角距弧度升交点赤径变化率弧度gps卫星星历卫星坐标计算cossin若设该轨道坐标系的x轴指向升交点则卫星在该坐标系统中的极角为升交距角gps卫星星历卫星坐标计算10计算观测时刻升交点经度gastgastga
卫星轨道参数详解
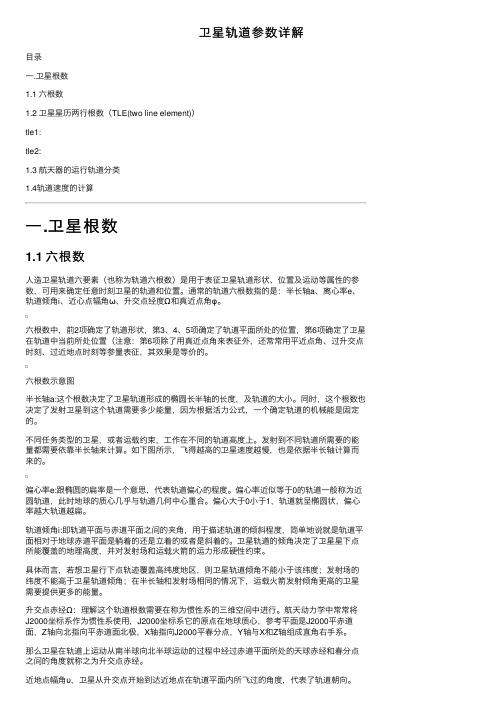
卫星轨道参数详解⽬录⼀.卫星根数1.1 六根数1.2 卫星星历两⾏根数(TLE(two line element))tle1:tle2:1.3 航天器的运⾏轨道分类1.4轨道速度的计算⼀.卫星根数1.1 六根数⼈造卫星轨道六要素(也称为轨道六根数)是⽤于表征卫星轨道形状、位置及运动等属性的参数,可⽤来确定任意时刻卫星的轨道和位置。
通常的轨道六根数指的是:半长轴a、离⼼率e、轨道倾⾓i、近⼼点辐⾓ω、升交点经度Ω和真近点⾓φ。
六根数中,前2项确定了轨道形状,第3、4、5项确定了轨道平⾯所处的位置,第6项确定了卫星在轨道中当前所处位置(注意:第6项除了⽤真近点⾓来表征外,还常常⽤平近点⾓、过升交点时刻、过近地点时刻等参量表征,其效果是等价的。
六根数⽰意图半长轴a:这个根数决定了卫星轨道形成的椭圆长半轴的长度,及轨道的⼤⼩。
同时,这个根数也决定了发射卫星到这个轨道需要多少能量,因为根据活⼒公式,⼀个确定轨道的机械能是固定的。
不同任务类型的卫星,或者运载约束,⼯作在不同的轨道⾼度上。
发射到不同轨道所需要的能量都需要依靠半长轴来计算。
如下图所⽰,飞得越⾼的卫星速度越慢,也是依据半长轴计算⽽来的。
偏⼼率e:跟椭圆的扁率是⼀个意思,代表轨道偏⼼的程度。
偏⼼率近似等于0的轨道⼀般称为近圆轨道,此时地球的质⼼⼏乎与轨道⼏何中⼼重合。
偏⼼⼤于0⼩于1,轨道就呈椭圆状,偏⼼率越⼤轨道越扁。
轨道倾⾓i:即轨道平⾯与⾚道平⾯之间的夹⾓,⽤于描述轨道的倾斜程度,简单地说就是轨道平⾯相对于地球⾚道平⾯是躺着的还是⽴着的或者是斜着的。
卫星轨道的倾⾓决定了卫星星下点所能覆盖的地理⾼度,并对发射场和运载⽕箭的运⼒形成硬性约束。
具体⽽⾔,若想卫星⾏下点轨迹覆盖⾼纬度地区,则卫星轨道倾⾓不能⼩于该纬度;发射场的纬度不能⾼于卫星轨道倾⾓;在半长轴和发射场相同的情况下,运载⽕箭发射倾⾓更⾼的卫星需要提供更多的能量。
升交点⾚经Ω:理解这个轨道根数需要在称为惯性系的三维空间中进⾏。
卫星星历数据产生方法研究
y 律 :卫 星 运 行 的 轨道 半球 飞 往 北 半球 时 。轨 道 与赤 道 平
为 ~ 椭 圆 . 该 椭 圆 的 面 相 交 的 那 一 点 称 为 升 交 点 : 赤 道
一
Hale Waihona Puke 个 焦 点 与 地 球 质 心 上 另 一 对称 点 称 为降 交点 。从 春 分
维普资讯
交 点 线 之 间 的 夹 角 ,从 上 往 下 看 逆 都 看 作是 某 一 椭 圆上 的点 .但 这些 轨 道 卫 星 定 轨 需要 很 精 密的 光 学观
时针 :
椭 圆 的 大 小 、 状 、 地 点 方 向 及 椭 测 仪器 ,这 就更 增加 了 它的局 限性 。 形 近
( 位 的精度和 可靠 性依 赖于 卫星 星 定
历 的精度 ) 目前 . 。 卫星 星历 的来源
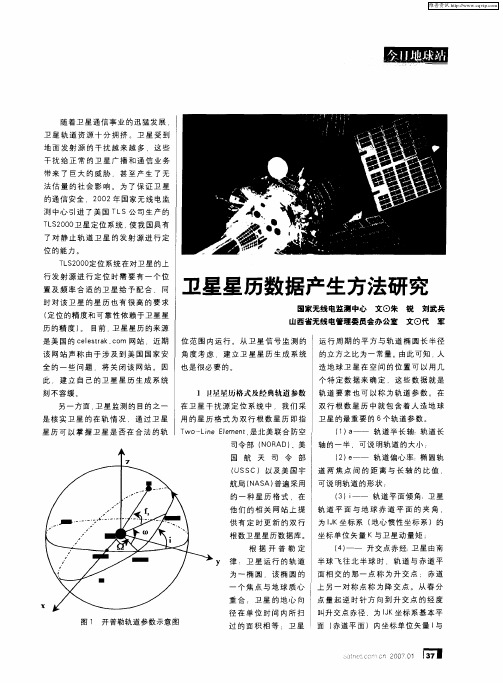
是 美 国的 c lsrk c m 网站 ,近期 位 范 围 内 运 行 。 从 卫 星 信 号 监 测 的 运 行 周 期 的平 方 与 轨道 椭 圆长 半径 eeta .o 该 网 站声 称 由于 涉及 到 美 国 国 家安 角度 考 虑 ,建 立 卫 星星 历 生 成 系统 的立 方之 比为一 常量 。由此 可知 . 人 全 的一 些 问题 .将 关 闭 该 网站 。 因 也 是很必 要 的。 此 ,建 立 自 己的卫 星 星 历 生成 系统
() 5 一一 近地点 幅 角 . 也称 近地 圆平 面 在 空 间 的位 置 、 方 向各 不 相
无 线 电测 量 是 通 过地 面 测 控 站
点角距 :轨 道平面 上 . 心 与升 交点 同 。这 种在 实际 轨 道 上 某一 点 的椭 向卫 星 发射 信 号 并 接 收卫 星 的下 行 地 的连 线 与地 心 和 近 地点 的连 线 之 间 圆轨 道 . 常称 为密切轨 道 。卫星 在 信 号 ,从 而计 算出卫 星 的运 动参数 . 通
GPS信号组成-导航电文
导航电文是用户用来定位和导航的数据基础。
它包含该卫星的星历、工作状况、时钟改正、电离层时延改正、大气折射改正以及由C/A码捕获P码等导航信息,也是由卫星信号中解调出来的数据码D(t)。
这些信息以50bit/s的数据流调制在载频上,数据采用不归零制(NRZ)的二进制码。
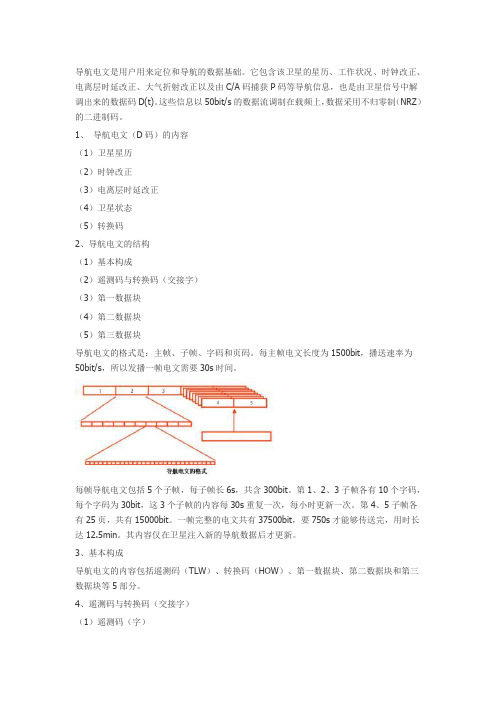
1、导航电文(D码)的内容(1)卫星星历(2)时钟改正(3)电离层时延改正(4)卫星状态(5)转换码2、导航电文的结构(1)基本构成(2)遥测码与转换码(交接字)(3)第一数据块(4)第二数据块(5)第三数据块导航电文的格式是:主帧、子帧、字码和页码。
每主帧电文长度为1500bit,播送速率为50bit/s,所以发播一帧电文需要30s时间。
每帧导航电文包括5个子帧,每子帧长6s,共含300bit。
第1、2、3子帧各有10个字码,每个字码为30bit,这3个子帧的内容每30s重复一次,每小时更新一次。
第4、5子帧各有25页,共有15000bit。
一帧完整的电文共有37500bit,要750s才能够传送完,用时长达12.5min。
其内容仅在卫星注入新的导航数据后才更新。
3、基本构成导航电文的内容包括遥测码(TLW)、转换码(HOW)、第一数据块、第二数据块和第三数据块等5部分。
4、遥测码与转换码(交接字)(1)遥测码(字)同步码:第1~8bit遥测电文:第9~22bit无意义连接比特:第23~24bit检校:第25~30bit每个子帧的第一个字码都是遥测码,作为捕获导航电文的前导。
其中所含的同步信号为各子帧提供了一个同步起点,使用户便于解释电文数据。
具体码位如下:第1~8bit为同步码(10001001),第9~22bit为遥测电文,包括地面监控系统注入数据时的状态信息、诊断信息和其它信息,以此指示用户是否选用该卫星。
第23、24bit无意义,第25~30bit为奇偶检验码。
(2)转换码Z计数:第1~17bit特殊标识1:第18bit特殊标识2:第19bit,同步标识,AS标识子帧标识:第20~22bit,第几子帧无意义连接比特:第23~24bit检校:第25~30bit每个子帧的第二个字码是转换码,它的主要作用是帮助用户从捕获的C/A码转换到P码的捕获。
卫星运动的基础知识

x x0 Rz L Rx i y0 y 再将瞬地转换为协地。 z z 瞬地 0 轨道
扫过的面积相等
2、无摄运动的轨道参数 轨道形状与大小:轨道长半径as;扁心率es; 轨道椭圆在轨道平面上的定向:近地点角距ω; 卫星在轨道平面上的位置:真近点角V(变量); 轨道平面与地球体之间的相对定向:升交点赤经Ω;轨道面倾角i。 辅助参数平近点角M和偏近点角E。 M=n(t-t0)…………t0为卫星过近地点时刻。 参数说明 近地点角距——近地点与升交点的地心夹角。 真近点角——卫星与近地点的地心夹角。 升交点赤经——升交点与春分点的地心夹角。 轨道面倾角——卫星轨道面与天球赤道面的夹角。 升交距角——卫星与升交点的地心夹角,即真近点角与近地点角距之 和。
第三章 卫星运动的基础知识与GPS卫星星历
第一节 卫星的无摄运动与受摄运动
一、卫星的无摄运动
卫星运动不仅受地心引力的作用,而且还受到非地心引力、日 月引力、行星引力、太阳光压、地球潮汐、大气阻力等影响。除地心引 力外的其它作用力称为摄动力。只考虑地心引力的卫星运动叫无摄运动, 考虑其它作用力的卫星运动叫受摄运动。
x0 cos u y 0 r s in u 6、卫星在轨道直角坐标系中的位置 0 z 0
7、升交点在 WGS-84 中的大地经度 L ω 为地球自转角速度,见 P19. 8、卫星在 WGS-84 中的坐标
)(t t ) t 0 ( oe oe
第二节 GPS卫星星历
卫星星历是描述卫星运行轨道的参数,分 预报星历和后处理星历。 1、预报星历 由卫星向用户播发。可用于实时定位。分 C/A码星历和P码星历。 内容:分三部分,开普勒六参数、轨道 摄动九参数、时间二参数。
GPS卫星预报星历的解码及卫星预报

GPS卫星预报星历的解码及卫星预报GPS 卫星预报星历的解码及卫星预报郑 ,王解光(同济⼤学测量系,上海 200092)摘要:本⽂对GPS 卫星播发的预报星历进⾏了分析,主要讲述GPS 接收机接收到的⼆进制预报星历⽂件的详细格式,将其解码并⽣成R EN I X 210标准格式⽂件,利⽤解码获得的卫星轨道参数来计算GPS 卫星坐标,并进⾏卫星预报。
关键词:解码;预报星历;标准格式⽂件;轨道参数中图分类号:P 22814⽂献标识码:BAbstract :T h is paper analyzes the fo recasting ephem eris trans m itted by GPS 2satellites and describes and detailed fo r m at of the binaryephem eris docum ent received by GPS 2receivers .T he docum ent is then decoded into the standard fo r m at in R EN I X 210and the o rbit pa 2ram eters of satellites are obtained .T he calculati on of GPS 2satellites coo rdinates and satellites fo recasting are perfo r m ed w ith these pa 2ram eters .Key words :decoding ;fo recasting ephem eris ;o rbit param eters1 前⾔GPS 卫星播发的导航电⽂中包含⼴播星历(卫星星历)和预报星历(卫星历书)。
⼴播星历可⽤于GPS 实时定位计算,预报星历则⽤于在较长的时间周期内对GPS 卫星的位置进⾏预报。
第三、四章 GPS卫星定位基础要点
• •
卫星轨道运动
• 卫星轨道:卫星在空间绕地球飞行时的的 运行轨迹。 • 无摄运动:仅仅考虑地球的质心引力对卫 星的引力作用来研究卫星的运动。
• 受摄运动:卫星在各种引力作用下的运动, 或卫星在摄动力下的运动。
卫星轨道运动
• 1、卫星轨道 • ������ 在固定的轨道上运行,在地球引力场中运动。 • ������ 二体运动(无摄运动):研究两个质点在万 有引力作用下的下的相对运动问题,在天体力学 中称为二体问题。 • ������ 二体运动是一种理想状态下的卫星运动: • (1)视地球为一理想的均质球体 • (2)在一理想的引力场中的运动(地球与卫星之 间) • 卫星受地球的引力为:
• 如果已知这6个轨道参数,就惟一地确定了二体 • 问题意义下卫星的运动状态。换句话说,只要已 知这6个轨道参数,就可以计算卫星的瞬时位置和 瞬时速度。 • 由这6个轨道参数所构成的坐标系统,称为轨道 • 坐标系统,它广泛用于描述卫星的运动。这6个轨 道参数的大小则由卫星的发射条件决定。
ቤተ መጻሕፍቲ ባይዱ星轨道运动
• ������ 受摄运动:受太阳引力、月亮引力、 地球潮汐、光辐射等的影响下卫星的运动。 • ������ 改正值:9个改正参数。
卫星轨道运动
卫星轨道运动
• 2、卫星星历 • ������ 广播星历:也叫预报星历,是指相对参考历元 的外推星历。参考历元瞬间的卫星星历(即参考星 历),由GPS系统的地面监控站根据大约一周的观测 资料计算而得,为参考历元瞬间卫星的轨道参数。 • ������ • 预报星历的内容包括:参考历元瞬间的kepler轨道6 参数,反映摄动力影响的9个参数,以及参考时刻 参数和星历数据龄期,共计17个星历参数。用户接 收机在接收到卫星播发的导航电文后,通过解码即 可直接获得预报星历。由于预报星历是以电文方式 由卫星直接播送给用户接收机,因此又称为广播星 历。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
struct GPSAlm {
+ u1 sv; // 卫星PRN编号 [1-37]
+ i2 wna; // 历书参考周数 []
+ i4 toa; // 历书参考周时 [秒]
+ u1 healthA; // 健康状态:
// 0..4 –卫星信号健康状态
// 5..7 –导航数据健康状态
+ u1 healthS; // 卫星健康状态,第5子帧25页
u1 config; // 卫星配置,第4子帧25页
// 0..2 –卫星配置
// 3 –反欺骗标志
// 4..7 –保留
//===== 时钟数据 =====
+ f4 af1; // 多项式系数 [s/s]
+ f4 af0; // 多项式系数 [s]
//===== 星历数据 =====
//--- 开普勒轨道参数 ---
+ f4 rootA; // 长半轴的平方根 [m^0.5]
+ f4 ecc; // 偏心率 []
+ f4 m0; // 在历元时刻的真近点角,在指定时间(历元)由近地点到卫
//星所在点的角度
+ f4 omega0; // 升交点赤经,从春分点到卫星轨道由南往北穿过赤道的
//那一点的角度
+ f4 argPer; // 近地点幅角,在轨道平面内升交点到近地点的角度
//--- 轨道参数校正 ---
+ f4 deli; // 倾角校正[半圆]
+ f4 omegaDot; // 上升速度 [半圆/秒]
+ u1 cs; // 校验和
};
struct GPSEphemeris {
+ u1 sv; // 卫星PRN编号 [1-37]
+ u4 tow; // 周时 [秒]
+ u1 flags; // 标志:
// 0 –曲线拟合间隔
// 1 – L2 P码的数据标志
// 2..3 – L2编码
// 4 –反欺骗标志 (从HOW获得)
// 5 –报警标志 (从HOW获得)
// 6 - '1' :表示在接收机复位或加电后,星历是从NVRAM
//中获取的
// 7 –保留
//===== 时钟数据(子帧1)=====
+ i2 iodc; // 时钟数据龄期[]
+ i4 toc; //时钟数据参考时间 [秒]
+ i1 ura; //用户测距精度[]
+ u1 healthS; //卫星健康状态 []
+ i2 wn; //周数 []
+ f4 tgd; //群延迟微分估计 [秒]
+ f4 af2; // 多项式系数 [s/(s^2)]
+ f4 af1; // 多项式系数[s/s]
+ f4 af0; // 多项式系数[s]
//===== 星历数据 (子帧2和3) =====
+ i4 toe; //星历参考时 [秒]
+ i2 iode; //星历数据龄期 []
//--- 开普勒轨道参数 ---
+ f8 rootA; // 长半轴的平方根 [m^0.5]
+ f8 ecc; // 偏心率 []
+ f8 m0; // 在历元时刻的真近点角,在指定时间(历元)由近地点
//到卫星所在点的角度
+ f8 omega0; //升交点赤经,从春分点到卫星轨道由南往北穿过赤道的那
//一点的角度
+ f8 inc0; //倾角,赤道平面与卫星轨道平面间的夹角
+ f8 argPer; //近地点幅角,在轨道平面内升交点到近地点的角度
//--- 轨道参数校正 ---
+ f4 deln; // 平均动差[semi-circle/s]
+ f4 omegaDot; // 赤经速度 [semi-circle/s]
+ f4 incDot; // 倾角速度 [semi-circle/s]
+ f4 crc; // 轨道半径余弦校正[m]
+ f4 crs; // 轨道半径正弦校正[m]
+ f4 cwc; // 纬度幅角余弦校正[rad]
+ f4 cws; // 纬度幅角正弦校正 [rad]
+ f4 cic; // 倾角余弦校正 [rad]
+ f4 cis; // 倾角余弦校正 [rad]
+ u1 cs; // 校验和
};
4.3.6.19 [NA] GLONASS历书{46}
struct GLOAlmanac {
+ u1 sv; // 卫星编号 [1..24] []
+ i1 frqNum; // 卫星频道号 [-7..24] []
+ i2 dna; // 日期(从闰年起始的4年周期内) []
+ f4 tlam; // 第一个升交点时间 [s]
+ u1 health; // 卫星健康状态:
// 0-‘1'代表健康, ‘0'–非健康
// 1..7- 保留
//===== 时钟数据 =====
+ f4 tauN; // 星钟与GLONASS系统时间初步校正 [s]
+ f8 tauSys; // GLONASS系统时与UTC(SU)时间的校正 [s]
//===== 星历数据 =====
+ f4 ecc; // 参考时‘tlam'的偏心率[]
+ f4 lambda; // 参考时‘tlam'的升交点经度
+ f4 argPer; // 参考时‘tlam'的近地点角距
+ f4 delT; // 参考时‘tlam'的平均周期校正 [s/period].
+ f4 delTdt; // 周期变化速度 [s/period^2]
+ f4 deli; // 参考时‘tlam'的倾角校正
+ u1 cs; // 校验和
};
4.3.6.20 [NE] GLONASS星历
struct GLOEphemeris {
u1 sv; // 卫星编号 [1..24] []
+ i1 frqNum; // 卫星频道号 [-7..24] []
i2 dne; // 日期(从闰年起始的4年周期内)[]
+ i4 tk; // 当天内的数据帧起始时间 [s]
+ i4 tb; // 星历参考时[s]
+ u1 health; // 卫星健康状况:
// 0 –星历的卫星健康状况: 1 –非健康, 0 –健康
// 1 –如果置位,表示时频参数‘tau'和‘gamma'可能出错,记住
// JNS接收机能够完成几个“内部”数据的一致性检查,从而允许
// 对广播数据的错误检测
// 2 –如果置位,表示初始条件‘r[3]'和‘v[3]'可能出错
// 3 –从历书获得的卫星健康状况(字Cn):0–非健康,1–健康
// 4 –如果置位,表示历书中的卫星健康标志有效
// 5..7 –保留
//===== 星历数据 ======
+ u1 age; // 数据龄期(En) [days]
+ u1 flags; // 标志(详细介绍,见GLONASS ICD):
// 0..1 –字p1
// 2 –字p2
// 3 –字p3
// 4..5 –字Bn中的低2位
// 6 –‘1' 表示旧的星历
// 7 –保留
+ f8 r[3]; // 卫星的PE-90坐标 [km]
+ f4 v[3]; // 卫星的PE-90速度 [km/s]
+ f4 w[3]; // 卫星由于受月球和太阳的引力影响,在PE-90中的加速度
// [km/s^2]
//===== 时钟数据 ======
+ f8 tauSys; // GLONASS系统时间与UTC(SU)的校正,T UTC(SU) - T GLN [s] + f4 tau; // GLONASS时间与卫星时钟的校正,T GLN - T SV [s]
+ f4 gamma; // 卫星钟漂移速率 [s/s]
+ u1 cs; // 校验和
};。