天文导航
天文导航第2章 球面几何
17
天文导航原理及应用
2.2 球面三角
计算菲尔德和彼得堡之间小圆弧航 线的距离公式为:
在纬度53°23/N的圆弧周长=2πr,
其中,r = R cos AOC, AOC =
53°23´ = 53.3833°。 图中的红色弧ARB是这个圆周的一
部分,因此,
ARB = (160°.1667/360°)x2π
➢角的基本性质 1 球面三角形三角之和大于180Ο,小于540Ο。 2 球面三角形两角之和减去第三角小于180Ο。
➢边、角间的基本性质 边角存在对应关系,等边对等角;等角对等边;大边对大角。
13
天文导航原理及应用 2.3 球面三角
2.3.4 球面三角形的面积
球面S2 ( O , 1) 上球面三角形ABC 的面积为
原球面三角形与其极线三角形的关系
1 若一球面三角形是另一球面三角形的极线三角形,则这一球面三角 形也是前一球面三角形的极线三角形,即二者互为极线三角形。 2 极线三角形的边(角)与原球面三角形的角(边)互补。
12
天文导航原理及应用
2.3 球面三角
2.3.3 球面三角形的边角基本性质 ➢边的基本性质 1 球面三角形三边之和大于0Ο,小于360Ο。 2 球面三角形两边之和大于第三边,两边之差小于第三边。
cos AYB = (cos 36°.6167)2 + (sin 36°.6167)2 cos 160.1667° AYB = 71°.9663 = 71°58´ = 4318´.
因此菲尔德和彼得堡之间的大圆弧航线(黄色弧)距离是4318个海里,该
航线所需的时间为4318/500=8.636h=8h38m。
15
天文导航原理及应用
现代天文导航及其关键技术
现代天文导航及其关键技术一、本文概述Overview of this article随着科技的飞速进步和全球化的日益加深,天文导航作为一种古老而精确的导航技术,在现代社会中仍发挥着不可替代的作用。
天文导航不仅在海洋航行、空间探索等领域占据重要地位,而且在民用航空、卫星通信等方面也有着广泛的应用。
本文旨在全面介绍现代天文导航技术的发展现状、关键技术及其应用前景,以期为相关领域的研究者和实践者提供有价值的参考。
With the rapid progress of technology and the deepening of globalization, astronomical navigation, as an ancient and precise navigation technology, still plays an irreplaceable role in modern society. Astronomical navigation not only occupies an important position in fields such as ocean navigation and space exploration, but also has extensive applications in civil aviation, satellite communication, and other fields. This article aims to comprehensively introduce the current development status, key technologies, andapplication prospects of modern astronomical navigation technology, in order to provide valuable references for researchers and practitioners in related fields.文章首先将对天文导航的基本原理和历史发展进行简要回顾,以便读者对其有一个整体的认识。
太空中的坐标系:航天站如何定位与导航
太空中的坐标系:航天站如何定位与导航1.引言在太空探索的过程中,航天站的定位和导航是至关重要的。
太空中没有地面标志物,也没有大气层来提供参考,因此航天站必须依靠先进的技术和系统来确保准确的定位和导航。
本文将介绍航天站在太空中如何进行定位与导航的过程。
2.定位系统航天站的定位依赖于全球定位系统(GPS)。
GPS是由一组卫星组成的网络,这些卫星以固定的轨道绕地球运行,向航天站发送信号。
航天站接收这些信号,并使用内置的计算机处理它们,从而确定其准确的位置。
这样,航天员可以随时知道航天站相对于地球的位置,并进行必要的调整。
3.惯性导航系统除了GPS之外,航天站还配备了惯性导航系统。
惯性导航系统使用陀螺仪和加速度计等传感器来测量航天站的加速度和角速度,从而确定其当前的位置和速度。
这种系统不依赖于外部参考,因此可以在没有GPS信号的情况下独立工作。
然而,惯性导航系统会有漂移问题,需要定期校正。
4.地面控制中心航天站的定位和导航还依赖于地面控制中心。
地面控制中心通过与航天站的通信链路传输指令和数据,并监控航天站的状态和位置。
地面控制中心使用复杂的算法和模型来计算航天站的轨道和位置,并与航天员共同制定飞行计划和调整。
地面控制中心还负责更新航天站的导航软件和系统,以确保其始终保持最新和准确的数据。
5.太空天文导航航天站在太空中还可以利用太空天文导航来进行定位。
太空天文导航是通过观测星体和天文现象来确定航天站的位置和方向。
例如,航天员可以通过观测太阳、月亮和恒星的位置来确定自己相对于地球的位置。
这种方法不仅可以提供独立的定位手段,还可以用于校准其他导航系统的精度。
6.定位和导航的挑战航天站的定位和导航面临着一些挑战。
首先,太空中的引力场相对较弱,微小的引力变化可能会对航天站的轨道产生重大影响,因此需要精确计算和调整。
其次,太空中存在微弱但极其复杂的磁场,这可能会对航天站的导航系统造成干扰。
此外,太空环境中的辐射和宇宙尘埃等因素也可能对航天站的定位和导航造成影响。
历史航海知识点归纳总结
历史航海知识点归纳总结一、古代航海技术1. 天文导航古代航海者通常依靠天文导航来确定航向和位置。
其中以观测太阳、星星和月亮最为常见。
古代希腊人使用天文观测来绘制星图,并且运用这些星图来确定船只的位置和方向。
另外,中国的郑和航海也使用了天文导航技术,这为他的远洋航行提供了重要的帮助。
2. 船舶技术古代船舶技术在航海中扮演着重要的角色。
古埃及人、古希腊人和古罗马人都发展出了各自的航海技术,包括船帆、舵和船舱。
这些技术的发展为古代航海者提供了更好的船只和装备,大大提高了远洋航行的成功率。
3. 海上贸易古代的航海活动主要是以海上贸易为主。
古代迦太基和罗马帝国是当时最重要的海上贸易国家,他们的船队曾经航行到地中海和印度洋地区,进行了大规模的贸易活动,这为古代航海技术的发展提供了重要的动力。
二、地理发现和殖民扩张1. 大航海时代大航海时代是欧洲探险家们在15世纪至17世纪期间进行大规模航海探险的时期。
著名的探险家有哥伦布、麦哲伦、麦哲伦圆周和德雷克等。
他们的航海活动开启了地理大发现的时代,也拉开了欧洲殖民扩张的序幕。
2. 新大陆的发现在大航海时代,欧洲探险家发现了许多新大陆,其中最重要的是哥伦布发现的美洲大陆。
这一地理发现彻底改变了世界地图,为欧洲各国的殖民扩张提供了新的机会。
3. 殖民扩张大航海时代也是欧洲国家进行殖民扩张的时期。
葡萄牙、西班牙、荷兰、法国和英国等国家在这一时期内建立了大量的殖民地,他们探索和征服了整个美洲大陆,也在非洲、亚洲和大洋洲地区建立了殖民地。
三、航海科学的发展1. 海洋学海洋学是研究海洋的科学,包括海洋地质、海洋生物、海洋化学等方面。
海洋学的发展为航海提供了重要的支持和帮助,也促进了现代航海科技的发展。
2. 航海仪器随着科学技术的发展,航海仪器也得到了极大的改进。
如永恒历、海图、罗盘、望远镜等,这些仪器在航海中起到了至关重要的作用。
3. 北极航线和南极航线北极航线和南极航线是世界上最危险的航行路线。
星星的指引:宇宙中的导航之谜
1. 人类自古以来就对星星抱有着浓厚的兴趣和好奇心。
除了美丽的景观,星星还帮助人们在夜晚找到方向。
然而,星星的作用不仅止于此。
在宇宙中,星星扮演着重要的角色,为航海家、航天员和科学家提供了宝贵的导航工具。
2. 这是一个神秘而庞大的宇宙,在这个宇宙中,星星点缀其中。
通过观察星星的位置、亮度和运动,人们发现了一种独特的导航方法,称为天文导航。
在没有现代技术的年代,人们依靠星星来指引方向,探索未知的领域。
3. 天文导航的基本原理是依靠星星的位置和运动来确定自身的位置和朝向。
当人们知道自己所处的位置,他们就可以预测星星的位置和运动,并以此为基准来导航。
这需要观察和记录星星的位置和亮度,以及它们与其他星体的相对位置。
4. 在古代,人们用简单的工具如十字杖和星盘来进行天文导航。
十字杖是一种测量天体角度的工具,而星盘则是一个可旋转的圆盘,上面标有星座和星体的位置。
通过将星盘对准特定的星体,人们可以确定自己所处的位置,并根据它们的运动来导航。
5. 随着科学和技术的进步,天文导航变得更加精确和高效。
现代天文导航使用先进的设备和技术来观察和记录星星的位置和运动。
卫星导航系统如全球定位系统(GPS)利用多颗卫星的信息来确定地面接收器的位置和时间。
6. 天文导航不仅在地球上发挥着重要作用,还在太空探索中起到关键性的作用。
航天员们依靠星星来确定他们的位置和飞行方向。
他们使用星座和特定的亮星来导航,确保他们的航天器在正确的轨道上飞行。
7. 此外,天文导航对于深空探测任务也至关重要。
当航天器远离地球时,GPS等卫星导航系统无法提供准确的定位信息。
在这种情况下,天文导航成为唯一的选择。
科学家们通过观测和计算星星的位置和运动来确定航天器的准确位置,以便进行精确的导航。
8. 天文导航不仅仅是为了寻找方向,它还在科学研究中起着重要作用。
通过研究星星的位置和亮度变化,科学家可以深入了解宇宙的演化和结构。
他们可以利用星星的信息来研究恒星的生命周期、星系的形成和演化,以及宇宙的起源和命运。
天文导航的原理及应用
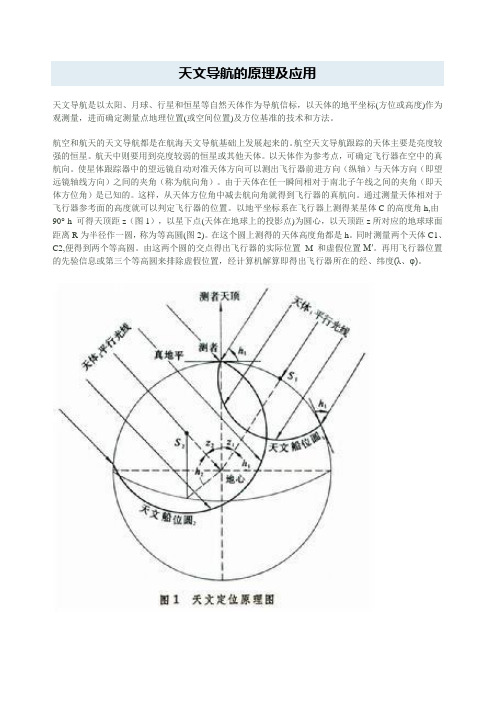
天文导航的原理及应用天文导航是以太阳、月球、行星和恒星等自然天体作为导航信标,以天体的地平坐标(方位或高度)作为观测量,进而确定测量点地理位置(或空间位置)及方位基准的技术和方法。
航空和航天的天文导航都是在航海天文导航基础上发展起来的。
航空天文导航跟踪的天体主要是亮度较强的恒星。
航天中则要用到亮度较弱的恒星或其他天体。
以天体作为参考点,可确定飞行器在空中的真航向。
使星体跟踪器中的望远镜自动对准天体方向可以测出飞行器前进方向(纵轴)与天体方向(即望远镜轴线方向)之间的夹角(称为航向角)。
由于天体在任一瞬间相对于南北子午线之间的夹角(即天体方位角)是已知的。
这样,从天体方位角中减去航向角就得到飞行器的真航向。
通过测量天体相对于飞行器参考面的高度就可以判定飞行器的位置。
以地平坐标系在飞行器上测得某星体C的高度角h,由90°-h 可得天顶距z(图1),以星下点(天体在地球上的投影点)为圆心,以天顶距z所对应的地球球面距离R为半径作一圆,称为等高圆(图2)。
在这个圆上测得的天体高度角都是h。
同时测量两个天体C1、C2,便得到两个等高圆。
由这两个圆的交点得出飞行器的实际位置M 和虚假位置M′。
再用飞行器位置的先验信息或第三个等高圆来排除虚假位置,经计算机解算即得出飞行器所在的经、纬度(λ、φ)。
天文导航的分类按星体的峰值光谱和光谱范围分,天文导航可分为星光导航和射电天文导航。
观测天体的可见光进行导航的叫星光导航,而接收天体辐射的射电信号(不可见光)进行导航的叫射电天文导航。
前者可解决高精度昼夜全球自动化导航定位,后者可克服阴雨等不良天气影响,通过探测射电信号进行全天候天文导航与定位。
根据跟踪的星体数,天文导航分为单星、双星和三星导航。
单星导航由于航向基准误差大而定位精度低,双星导航定位精度高,在选择星对时,两颗星体的方位角差越接近90°,定位精度越高。
三星导航常利用第三颗星的测量来检查前两次测量的可靠性,在航天中,则用来确定航天器在三维空间中的位置。
导航技术及其发展
导航技术及其发展导航技术是指通过各种手段确定自身位置、方向和速度的技术,是现代社会中不可或缺的一部分。
它广泛应用于军事、航空、航海、汽车、手机等领域,极大地提高了人们的生活质量和工作效率。
本文将从导航技术的发展历程、主要技术及其应用前景三个方面进行探讨。
一、导航技术的发展历程1. 古代导航技术在古代,人们主要依靠天文导航、地文导航和经验导航进行定位。
天文导航是通过观测天体位置来确定自身位置的方法,如我国古代的航海家郑和就是利用天文导航技术实现了七次下西洋的壮举。
地文导航则是根据地形、地貌等地理特征来确定位置,如古代丝绸之路上的商队就是利用地文导航技术进行贸易往来。
经验导航则是依靠船员的经验和直觉来判断航向和距离。
2. 近代导航技术随着科学技术的发展,近代导航技术逐渐从经验导航向仪器导航转变。
19世纪末,无线电技术的发明为导航技术的发展提供了新的动力。
1906年,德国人布劳恩首次利用无线电波进行航海导航实验,标志着无线电导航技术的诞生。
随后,各种无线电导航系统如罗兰(Loran)、奥米加(Omega)等相继问世,为航海、航空等领域提供了准确的导航服务。
3. 现代导航技术20世纪70年代,美国开始研发全球定位系统(GPS),并于1994年全面建成。
GPS具有全球覆盖、全天候、高精度等特点,迅速成为现代导航技术的主流。
随后,俄罗斯、欧盟等国家和地区也相继研发了自己的全球导航卫星系统(GLONASS、Galileo等),形成了全球导航卫星系统的竞争格局。
我国自主研发的北斗卫星导航系统(BDS)也于2000年发射成功,并于2020年全面建成,成为全球四大卫星导航系统之一。
二、主要导航技术1. 天文导航天文导航是通过观测天体位置来确定自身位置的方法。
古代的天文导航主要依靠肉眼观测,现代天文导航则利用天文望远镜、星敏感器等设备进行观测。
天文导航具有高精度、不受环境限制等优点,但受天气影响较大。
2. 地文导航地文导航是根据地形、地貌等地理特征来确定位置的方法。
船用天文导航设备的技术特点与优势分析
船用天文导航设备的技术特点与优势分析引言:航海导航一直以来都是人类文明发展中的重要组成部分。
随着科技的进步和全球化的发展,船只导航设备的技术也在不断提升。
船用天文导航设备作为一种传统的导航方式,具有独特的技术特点和优势。
本文将对船用天文导航设备的技术特点与优势进行分析。
一、技术特点1. 天文观测精度高:船用天文导航设备是通过观测星体的位置和运动来进行航位推算的。
借助船载天文观测仪器,船只可以观测到恒星、行星和月球等天体的位置和方位,进而计算出船只的准确位置。
相比其他导航设备,船用天文导航设备的观测精度更高,可以达到较高的导航精度。
2. 不受电子干扰影响:在现代化的船舶上,电子设备广泛应用于各个领域,但是在某些情况下,电子设备可能会受到干扰导致工作不正常。
而船用天文导航设备则没有这个问题,它是基于天文观测的方式来进行导航,不受电磁波等电子干扰的影响,可以保证导航的稳定性和可靠性。
3. 独立性强:船用天文导航设备是一种独立的导航系统,不依赖于其他导航设备和基础设施。
即使在电子设备损坏或者通信中断的情况下,船只仍然可以凭借船用天文导航设备进行航位推算,确保船只的导航安全。
二、优势分析1. 完全无线化:相比其他导航设备,船用天文导航设备是完全无线化的。
船员只需要通过望远镜或者其他天文观测仪器观测星体的位置和方位,然后使用天文导航表进行计算,就可以得到船只的准确位置。
无需电子设备或者通信基站的支持,可以大大降低设备的维护和使用成本。
2. 抗干扰能力强:船用天文导航设备的导航结果不会受到电子设备和通信干扰的影响。
在海洋环境中,船只可能会遇到强电磁干扰或者通信中断的情况,而船用天文导航设备可以在这样的环境下正常工作,保证船只的导航安全。
3. 适应性强:船用天文导航设备适用于各种海洋环境和天气条件。
由于船只在航行中可能会遇到各种复杂的天气情况,如恶劣天气、强风浪等,这些情况可能会对其他导航设备产生影响。
而船用天文导航设备作为一种传统的导航方式,不会受到这些天气条件的限制,可以在各种复杂环境下正常工作。
天文导航的原理及应用
天文导航的原理及应用天文导航是以太阳、月球、行星和恒星等自然天体作为导航信标,以天体的地平坐标(方位或高度)作为观测量,进而确定测量点地理位置(或空间位置)及方位基准的技术和方法.航空和航天的天文导航都是在航海天文导航基础上发展起来的。
航空天文导航跟踪的天体主要是亮度较强的恒星。
航天中则要用到亮度较弱的恒星或其他天体.以天体作为参考点,可确定飞行器在空中的真航向。
使星体跟踪器中的望远镜自动对准天体方向可以测出飞行器前进方向(纵轴)与天体方向(即望远镜轴线方向)之间的夹角(称为航向角)。
由于天体在任一瞬间相对于南北子午线之间的夹角(即天体方位角)是已知的.这样,从天体方位角中减去航向角就得到飞行器的真航向。
通过测量天体相对于飞行器参考面的高度就可以判定飞行器的位置.以地平坐标系在飞行器上测得某星体C的高度角h,由90°-h 可得天顶距z(图1),以星下点(天体在地球上的投影点)为圆心,以天顶距z所对应的地球球面距离R为半径作一圆,称为等高圆(图2)。
在这个圆上测得的天体高度角都是h.同时测量两个天体C1、C2,便得到两个等高圆。
由这两个圆的交点得出飞行器的实际位置 M 和虚假位置M′.再用飞行器位置的先验信息或第三个等高圆来排除虚假位置,经计算机解算即得出飞行器所在的经、纬度(λ、φ)。
天文导航的分类按星体的峰值光谱和光谱范围分,天文导航可分为星光导航和射电天文导航。
观测天体的可见光进行导航的叫星光导航,而接收天体辐射的射电信号(不可见光)进行导航的叫射电天文导航。
前者可解决高精度昼夜全球自动化导航定位,后者可克服阴雨等不良天气影响,通过探测射电信号进行全天候天文导航与定位.根据跟踪的星体数,天文导航分为单星、双星和三星导航。
单星导航由于航向基准误差大而定位精度低,双星导航定位精度高,在选择星对时,两颗星体的方位角差越接近90°,定位精度越高。
三星导航常利用第三颗星的测量来检查前两次测量的可靠性,在航天中,则用来确定航天器在三维空间中的位置.仪器和系统航空常用的天文导航仪器有星体跟踪器、天文罗盘和六分仪等。
船用天文导航设备的工作原理及其应用方法介绍
船用天文导航设备的工作原理及其应用方法介绍导航是航海中的重要环节,而天文导航作为传统的导航方法之一,在航海史上扮演着重要的角色。
船用天文导航设备通过观测天体的位置、运动和亮度等参数,并根据天体导航规则和天体表进行计算,以确定船舶的位置和方向。
本文将详细介绍船用天文导航设备的工作原理以及应用方法。
一、船用天文导航设备的工作原理船用天文导航设备主要基于天体的位置和运动进行导航计算。
其工作原理可以分为以下几个步骤:1. 天体观测:船舶上安装有天文仪器,如船舶六分仪、船舶光电全球定位仪等,用于观测天体的位置、亮度和运动等相关参数。
观测通常在夜晚进行,以确保天体的可见性。
2. 计算观测数据:根据观测到的天体数据,包括天体的赤经、赤纬、视差和时间等,利用导航星表和计算公式进行计算。
导航星表是按照天体在天空中的位置和亮度等参数编制的一份详细表格,它能够帮助确定观测到的天体的身份和位置。
3. 确定位置和方向:通过观测数据的计算,船用天文导航设备能够确定船舶的准确位置和航向。
其中,船舶的位置是通过天体的赤经和赤纬计算得出,而航向则是通过天体的方位角和高度角计算得出。
二、船用天文导航设备的应用方法1. 天文纬度法:航海中常用的一种船用天文导航方法是天文纬度法。
该方法是根据某一天体(通常是北极星)在天空中的位置,结合仪器观测数据进行计算,确定船舶所处的纬度。
通过在不同时间观测同一天体的高度角,结合天文表和计算公式,可以推算出船舶的纬度。
2. 天文经度法:天文经度法是通过观测不同天体间的角距离,结合测量时间和观测数据进行计算,确定船舶所处的经度。
在进行观测时,需要准确测量天体的视差、方位角和高度角等参数,并据此进行计算。
天文经度法的精度较高,但观测过程较繁琐,需要船员具备一定的天文观测技能和知识。
3. 光电全球定位仪(GPS)辅助:随着现代技术的发展,船用天文导航设备通常结合GPS导航系统进行使用,以提高导航的准确性和可靠性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
式中 r x 2 y 2 z 2 为卫星位置矢量参数
(x,y,z)卫星在惯性坐标系下X、Y、Z方向的位 置 (vx,vy,vz)卫星在惯性坐标系下X、Y、Z方向的 速度 μ是地心引力常数 J2为地球引力系数 ДFx、 ДFy 、 ДFz为地球非球形的高阶摄动、 日月摄动以及太阳光压力摄动和大气摄动 等
2,星光仰角:指从飞行器上观测到的导航恒星与
地球边缘的切线方向之间的夹角
s Υ 星光仰角
飞行器
r
Re 地球
飞行器轨道
Re sr arcsin 星光仰角Υ的表达式为: arccos r r
Re sr arccos arcsin 星光仰角Υ的表达式为: r r 其中r是卫星在地心惯性球坐标系中的位置
dx dt v x dy v y dt dz v z dt z2 dv x x 1 J Re 7.5 2 1.5 Fx 2 3 dt r r r dv y y z2 Re 3 1 J 2 7 . 5 2 1. 5 Fy r r r dt z z2 Re dv z 7. 5 2 4 . 5 Fz dt r 3 1 J 2 r r
地球卫星的轨道动力学模型为二体问题,
其天文导航系统的模型相对简单,我们 以地球卫星为例学习基于轨道动力学的 自主天文导航原理。 根据原理,自主天文导航包括三个部分: 1,建立系统的状态模型 2,建立量测模型 3,估计
1,建立系统的状态模型(状态方程)
系统状态模型即卫星轨道动力学模型
系统状态方程简写为:
(t ) f ( X , t ) w(t ) X
式中,状态矢量 X [ x y z vx 误差矢量 w(t ) [0 0 0 Fx
vy
vz ]T
Fy Fz ]T
2,建立量测方程(观测方程)
1,星光角距:指从飞行器上观测到的导航恒星星 光的矢量方向与地心矢量方向之间的夹角
nn ( k , k 1) R 状态转移矩阵 ,过程噪声输入矩 nr ( k , k 1) R 阵 ,观测矩阵 H (k ) Rmn 。
s
飞行器 r
α星光角距
飞行器轨道 地球
rs 星光角距α的表达式为: arccos r
其中r是卫星在地心惯性球坐标系中的位置
矢量,由地平敏感器获得 s是导航星光方向的单位矢量,由星敏感 器获得
rs 量测方程为:Z (k ) v arccos v r
几种最优估计方法的比较
最小二乘估计法适用于对常值向量或随机向
量的估计。优点:算法简单 缺点:精度不高 最小方差估计是所有估计中的最佳者。但是 这种估计只确定出了估计值是被估计量在量 测空间上的条件均值这一关系。条件均值需 要通过条件概率密度求得,而条件概率密度 不易获得,所以按条件均值求最小方差估计 是困难的。
卡尔曼滤波
Kalman滤波是由R.
E. Kalman于1960年首 次提出的,它是一种线性最小方差估计,算 法具有递推性,使用状态空间方法在时域内 设计滤波器,适合处理多变量系统、时变系 统和非平稳随机过程。Kalman滤波器给出了 一套在计算机上容易实现的最优递推滤波算 法。
随机线性离散系统的数学模型
自主天文导航原理
1,基于纯天文几何解析的自 主天文导航原理 2,基于轨道动力学的自主天 文导航原理
基于轨道动力学的自主天文导航原理
根据航天器运行规律ቤተ መጻሕፍቲ ባይዱ立状态模型、以天文 观测信息建立量测模型,利用先进的估计方 法获得航天器的运动参数。
航天器自主天文导航系统模型存在确定性误 差和随即误差,无法准确建立导航系统的状 态模型,所以要获得高精度状态估值,必须 要用量测信息和先进的滤波方法对系统的状 态量即位置、速度等导航信息进行实时估计。
线性最小方差估计是所有线性估计中的最优
者,只有当被估计量和量测量都服从正态分 布时,线性最小方差估计才与最小方差估计 等同,即在所有估计中也是最优的。线性最 小方差估计可适用于随机过程的估计,估计 过程中只需知道被估计量和量测量的一阶和 二阶距。 极大验后估计、贝叶斯估计、极大似然估计 都与条件概率密度有关,除了一些特殊的分 布外,计算都十分困难。
滤波:即根据过去直至现在的观测量来估计现在的状态。 这类估计主要用于随机系统的实时控制。
平滑:即依据过去直至现在的观测量来估计过去的历史状 态。平滑也称内插。这类估计广泛应用于通过分析实验或 试验数据,对系统进行评估。
估计方法与估计准则是密切相关的。常用 的估计方法有:最小方差估计、极大验后 估计、极大似然估计、线性最小方差估计 和最小二乘估计。
随机线性离散系统的状态方程和观测方程为:
X (k ) (k , k 1) X (k 1) (k , k 1)W (k 1) Z (k ) H (k ) X (k ) V (k )
n m X ( k ) R Z ( k ) R 式中状态矢量 ,观测矢量 ,随 m r V ( k ) R 机过程噪声 W (k ) R ,随机观测噪声 ,
矢量 s是导航星光方向的单位矢量 Re是地球半径
量测方程为:
Re sr Z (k ) v arccos arcsin r r
v
3,估计
:
滤波、预测和平滑
预测:即根据过去直至现在的观测量来预测未来的状态。 预测也称外推。用于对系统未来状态的预测和实时控制。