雷达CFAR检测门限研究
雷达系统中的信号处理技术
雷达系统中的信号处理技术摘要本文介绍了雷达系统及雷达系统信号处理的主要内容,着重介绍与分析了雷达系统信号处理的正交采样、脉冲压缩、MTD和恒虚警检测几种现代雷达技术,雷达系统通过脉冲压缩解决解决雷达作用距离和距离分辨力之间的矛盾,通过MTD来探测动目标,通过恒虚警〔CFAR〕来实现整个系统对目标的检测。
关键词雷达系统正交采样脉冲压缩MTD 恒虚警检测1雷达系统概述雷达是Radar〔Radio Detection And Ranging〕的音译词,意为“无线电检测和测距”,即利用无线电波来检测目标并测定目标的位置,这也是雷达设备在最初阶段的功能。
雷达的任务就是测量目标的距离、方位和仰角,还包括目标的速度,以及从目标回波中获取更多有关目标的信息。
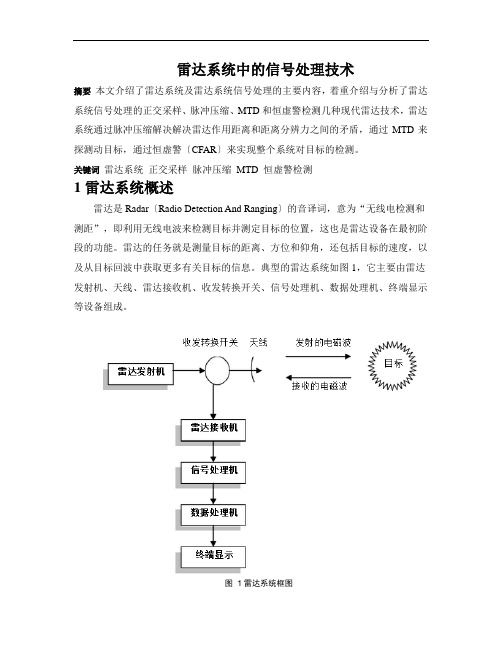
典型的雷达系统如图1,它主要由雷达发射机、天线、雷达接收机、收发转换开关、信号处理机、数据处理机、终端显示等设备组成。
图1雷达系统框图随着现代电子技术的不断发展,特别是数字信号处理技术、超大规模集成数字电路技术、电脑技术和通信技术的告诉发展,现代雷达信号处理技术正在向着算法更先进、更快速、处理容量更大和算法硬件化方向飞速发展,可以对目标回波与各种干扰、噪声的混叠信号进行有效的加工处理,最大程度低剔除无用信号,而且在一定的条件下,保证以最大发现概率发现目标和提取目标的有用信息。
雷达发射机产生符合要求的雷达波形,然后经馈线和收发开关由发射天线辐射出去,遇到目标后,电磁波一部分反射,经接收天线和收发开关由雷达接收机接收,然后对雷达回波信号依次进行信号处理、数据处理,就可以获知目标的相关信息。
雷达信号处理的流程如下:图 2 雷达信号处理流程2雷达信号处理的主要内容雷达信号处理是雷达系统的主要组成部分。
信号处理消除不需要的杂波,通过所需要的目标信号,并提取目标信息。
内容包括雷达信号处理的几个主要部分:正交采样、脉冲压缩、MTD和恒虚警检测。
正交采样是信号处理的第一步,担负着为后续处理提供高质量数据的任务。
CFAR处理中检测门限系数的研究

文章编号:1008-8652(2005)02-001-003ΞCFA R处理中检测门限系数的研究胡 航(哈尔滨工业大学 哈尔滨 150001) 【摘要】 雷达系统在进行恒虚警处理时,通常采用的参考单元数是有限的。
此时若采用理论的检测门限,将使虚警率大大增加。
本文中我们通过仿真的方法确定CFA R中的实际门限系数,研究有限的参考单元数对虚警性能的影响。
给出邻近单元平均恒虚警,选大恒虚警,选小恒虚警与加权单元平均恒虚警等四种检测器在不同参考单元数下的门限系数值。
同时得出了不同恒虚警率下的门限系数。
关键词:恒虚警检测;门限系数;虚警概率;参考单元数中图分类号:TN957 文献标识码:AStudy on D etection Threshold Coeff ic ien t i n CFAR Processi ngH u H ang(H a rbin Institu te of T echnology,H a rbin150001)Abstract:T he num ber of range cells is u sually fin ite fo r CFA R p rocessing in radar system. T herefo re,em p loying theo retical detecti on th resho ld w ill greatly increase the false alarm p robab ility.In o rder to guaran tee the false alarm p robab ility of CFA R detecto r,w e determ ine p ractical th resho ld coefficien ts by u sing si m u lati on s.T he influence of fin ite num ber of range cells on false alarm p erfo rm ance in the case of differen t false alarm p robab ilities is studied.W e give detecti on th resho ld coefficien ts of fou r k inds of CFA R detecto rs including CA2CFA R,GO2CFA R,SO2CFA R and W CA2CFA R w ith differen t num ber of range cells,and ob tain the th resho ld coefficien ts fo r differen t false alarm p robab ilities.Keywords:CFA R detecti on;th resho ld coefficien ts;false alarm p robab ility;num ber of range cells1 引言为抑制杂波,使数据处理机不因虚警太多而过载,雷达信号处理机中必须进行CFA R处理。
雷达自动检测和cfar处理方法综述

雷达自动检测和cfar处理方法综述
雷达自动检测和CFAR处理方法是雷达信号处理中的重要研究方向。
本文将对雷达自动检测和CFAR处理方法进行综述,包括其基本原理、常用算法和应用领域等方面进行介绍。
首先,本文将介绍雷达自动检测的基本原理。
雷达自动检测是指从雷达回波信号中自动检测出目标信息的过程。
其基本原理是通过对接收到的雷达回波信号进行信号处理,提取出目标信号的特征,并与噪声信号进行区分,从而实现目标的自动检测。
接着,本文将介绍常用的CFAR处理方法。
CFAR处理是一种基于雷达回波信号的背景噪声特性进行目标检测的方法。
其基本原理是利用已知背景噪声分布的统计特性来估计背景噪声的均值和方差,并将其用于检测目标信号。
本文还将介绍常用的CFAR算法,包括常规CFAR、底层CFAR、二维CFAR、维纳滤波CFAR等。
这些算法各有优缺点,在不同的实际应用场景中选择合适的算法将有助于提高雷达自动检测的准确性和鲁棒性。
最后,本文将介绍雷达自动检测和CFAR处理方法的应用领域,包括雷达目标识别、航空航天、军事侦察等方面。
这些应用领域对于雷达自动检测和CFAR处理方法提出了更高的要求,因此对于这些领域的研究将有助于提高雷达自动检测和CFAR处理方法的应用水平。
总之,本文将对雷达自动检测和CFAR处理方法进行全面综述,有助于读者对该领域的认识和理解。
雷达低空探测算法
雷达低空探测算法是用来检测和跟踪低空目标的一种技术,主要应用于军事和民用领域。
雷达低空探测面临的主要挑战是地面和低空目标的杂波干扰,以及目标与地面、建筑物之间的遮挡。
以下是一些常用的雷达低空探测算法:
1. CFAR算法:CFAR(Constant False Alarm Rate)算法是一种自适应杂波抑制算法,通过计算每个像素的杂波功率水平,调整门限电平,以保持恒定的虚警概率。
在低空探测中,CFAR算法可以有效抑制地面和低空杂波,提高目标检测概率。
2. MTI算法:MTI(Moving Target Indicator)算法是一种基于运动目标与固定杂波在多普勒频移上存在差异的算法。
通过滤波器组对回波信号进行滤波处理,去除固定杂波,保留运动目标信号。
MTI算法可以降低杂波干扰,提高运动目标检测能力。
3. DPC算法:DPC(Doppler Power Coherence)算法是一种基于多普勒频移的检测算法。
该算法通过分析多普勒频谱,检测出具有高功率谱密度的目标信号。
DPC算法对低空目标的探测具有一定的鲁棒性,能够克服地面和建筑物遮挡的影响。
4. 协同探测算法:协同探测算法是一种利用多个雷达站进行低空目标探测的算法。
该算法通过多个雷达站的信号处理和信息融合,提高低空目标的检测概率和定位精度。
协同探测算法可以降低单个雷达站面临的杂波干扰和遮挡问题。
这些算法各有特点,可以根据具体应用场景选择适合的算法进行低空目标探测。
同时,还需要注意雷达系统的参数设置,如波束宽
度、脉冲宽度、采样率等,以获得更好的低空探测性能。
常见雷达脉冲分选算法

常见雷达脉冲分选算法
雷达脉冲分选算法是雷达信号处理中的重要技术之一,用于从接收到的雷达回波信号中提取出目标的信息。
常见的雷达脉冲分选算法包括MTI(Moving Target Indication)和CFAR(Constant False Alarm Rate)等。
首先,让我们来看看MTI算法。
MTI算法通过比较连续两个脉冲回波信号的相位差异,来检测目标的运动状态。
当目标运动时,其回波信号的相位会发生变化,MTI算法可以利用这种相位变化来区分目标和杂波。
MTI算法可以有效地抑制地面回波和其他静止杂波,从而提高目标检测的性能。
另一个常见的雷达脉冲分选算法是CFAR算法。
CFAR算法主要用于检测雷达回波信号中的目标,并且能够抑制地面回波和其他干扰。
CFAR算法通过对每个脉冲回波信号的幅度进行统计分析,然后根据统计结果来判断该回波信号是否来自目标。
CFAR算法能够根据环境的变化自适应地调整检测门限,从而保持恒定的误警率。
除了MTI和CFAR算法外,还有一些其他的雷达脉冲分选算法,如动态门限算法、多时延脉冲压缩算法等。
这些算法在不同的雷达
应用场景中发挥着重要作用,可以根据具体的需求选择合适的算法来实现雷达信号处理和目标检测。
总的来说,雷达脉冲分选算法在雷达信号处理中起着至关重要的作用,能够有效地提取目标信息并抑制干扰,从而实现准确的目标检测和跟踪。
不同的算法有着各自的特点和适用场景,需要根据具体的应用需求来选择合适的算法进行应用。
cfar检测原理matlab -回复

cfar检测原理matlab -回复CFAR(Constant False Alarm Rate)是一种常用的雷达信号检测算法,主要用于在复杂背景噪声下提高雷达系统的探测性能。
CFAR检测算法通过自适应地调整检测门限来保持恒定的虚警率,从而在不同环境条件下实现可靠的目标检测。
CFAR检测原理基于目标和背景的统计特性之间的差异。
它利用了背景噪声在统计上是随机的这一特点,通过估计背景噪声的统计参数并以此来确定门限值。
CFAR方法可以通过在雷达图像上移动窗口来逐个像元地进行处理,从而检测到目标的存在。
下面我们将详细介绍CFAR检测算法的原理及其在MATLAB中的实现步骤。
CFAR检测算法的原理可以分为以下几步:1. 数据预处理:首先,我们需要对原始雷达数据进行预处理,包括去掉直流分量、调整数据范围和增加滤波器等。
这些操作旨在提取有效的信号,减小背景噪声的影响。
2. 确定窗口大小和形状:在CFAR检测算法中,我们需要选择窗口的大小和形状。
窗口的大小决定了检测算法的灵敏度和分辨率,而窗口的形状决定了背景噪声估计的准确性。
通常情况下,窗口的大小应根据目标的大小来选择,而窗口的形状可以选择矩形、圆形等。
3. 估计背景噪声统计参数:在CFAR检测算法中,我们需要通过估计背景噪声的统计参数来确定检测门限。
常用的估计方法包括计算窗口内像素的均值、中值等。
这些统计参数可以反映出背景噪声的分布特点,从而实现准确的目标检测。
4. 计算检测门限:一旦背景噪声的统计参数得到估计,我们就可以使用它们来计算检测门限。
门限值通常根据期望的虚警率来确定,例如,我们可以选择保持低于0.1的虚警率。
具体计算方法可以根据具体的CFAR算法而有所不同。
5. 目标检测:一旦检测门限值确定,我们就可以利用它来进行目标检测。
通过在雷达图像上移动窗口,并计算每个窗口内像素的统计参数,我们可以与先前计算的门限进行比较。
如果窗口内的统计参数超过了门限值,则判断该窗口内存在目标。
雷达CFAR检测的仿真研究

雷达CFAR检测的仿真研究郝迎春;陈客松【摘要】杂波背景中区分出有用目标回波的恒虚警(CFAR)检测技术,是直接影响雷达性能的关键技术之一。
主要研究了CFAR检测的基本理论,重点研究了ML 类CFAR算法中的邻近单元平均恒虚警(CA—CFAR)的检测算法,推导了其检测概率和虚警概率表达式,通过计算机仿真比较了在不同窗长情况下的检测门限。
%The CFAR detection technology which can differentiate the target echo pulse from the clutter is the key technology of the radar performance. The basic theory of the CFAR specially the CA-CFAR detection algorithm is studied, the formula of the false alarm and the discovery probability are deduced, and the threshold coefficients for different window length are compared by the simulation.【期刊名称】《全球定位系统》【年(卷),期】2012(037)001【总页数】3页(P78-80)【关键词】雷达;目标检测;恒虚警;门限【作者】郝迎春;陈客松【作者单位】电子科技大学电子工程学院,四川成都611731;电子科技大学电子工程学院,四川成都611731【正文语种】中文【中图分类】TN957.520 引言在定位系统中,雷达起着关键作用。
雷达定位主要测量目标的两个信息——距离和角度。
有了目标相对雷达的距离信息和角度信息,就可以知道目标相对雷达的位置,从而实现定位。
在雷达检测目标过程中,回波信号往往淹没在接收机热噪声或杂波中。
雷达CFAR检测
虚警概率
0.03
0.02
检测概率
CA-CFAR OS-CFAR
0 2
0
信杂比 (dB)
4
6
8
10
信杂比 AR和OS-CFAR均能保持虚警率恒定,两种检测器检测性能相当。
4. 仿真案例 2、假目标+杂波背景下雷达CFAR检测性能 仿真条件:杂波幅度服从瑞利分布,平均功率为50 ,参考单元数为32,左右参考距离单元内各有一个 假目标,假目标信号强度是真实目标信号强度的4倍 ,虚警概率为10-2,蒙特卡洛仿真次数为5000次。
雷达除了接收目标信号,还会接收噪声、 杂波或干扰信号。这些信号具有随机性,信号 的强度时刻在变化。为此,雷达如何根据杂波、 噪声这些背景信号自适应调整判决门限以保证
雷达具有恒定的虚警概率是雷达CFAR检测的关
键。
1. CFAR检测的概念
检验统计量 虚警概率: Pf f T H 0 dT
x1 x2 xL
参考单元
x
x L 1
xL 2
x2 L
1 2L
门限
比较器 比较器 检测结果
x
待 检 测 单 元
单元平均CFAR(CA-CFAR)检测器
3. CFAR检测器的实现 对数正态分布杂波下的CFAR检测器 对数正态分布:
2 ln x 1 f x exp 2 2 x
x2 x f x 2 exp 2 b 2b
令
zx
2
f z
1 z exp 2 2 2b 2b
噪声平均功率
Pn 2b2
Pf f z dz
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
%&'()&*+,-.-+/)0)*1'-,-'2*.)3-.31-+)(-+-'4'-3(,(3(230*.
12345647!&,789:;489489!&<;47=;489"&)6>8*>;!&=;2=;56;! $!#.7#$%!!,>?>4@A6B8?C;C2C>7D)+EB)&.48F;89"!&&&'&:;489?2&)6;84"
>?|}JK 0 `LM¯°[ì]^W6}Y a>?klØÙb c < ] d y {&÷ ø 0 ù# © _ > ? | } ´ &> ? k l W ` e )L M N O n b r s # p f &Ø g h i X G H ¯ ° > ? #
)+M)*+, ãZ÷ø" ù#
J|ìUo«Öy &© ® '!0( ~ V W Ç +# 8 f ~ ± X > ? 1 { Ò L N G H & ® '%(Y Z f x B J|/[\] ^ W > ? | } $R ´ ) - 8 > ? | } %# ´ 0 * 2 _ > ? | } #
! " # $ !!"#$%"!%!&"!"#$%"'%"& % & # '()*!+,-$#$$(% %&.&/ 0 1 2 3&4 5 1 2 6 7 8 9 :;<=>?@ABCD#
* RR *
! f ^ t K
+,-&!GH )*+, ÁÂÔÕ12
Xz>?W > k K d > ? N ^ _ & 'Q( Xz>?eK>?|}W 5#d>?<& ¡>k¢£&>?¤
¡W¥¦nb § ¢ £&¨ | © e K § ¢ ª «¬E#®''( L M N O G H ¯ ° ~ ± > ? ¡>kiI8!%JI&²© ¬ ³ e K & > k ´W>?±µ¶oZ·#¨8EFGH¸¹J Kº»¼½ b $)*+,%W ¾ ¿ À Á  6 Ã&B R Ä
6(/7*'??;78F4HH;89")*+,";8C>@@2GC>J?4HGK;89":E,
8 8 9
EFGHIJKLMNOPQRSTUVWX> YZ[\]^_ ` a b# c d L N P Q W e K&8 f ghijklYZmW>?klnbopq,rs& >?kltuB G H & v k l g w x y W X z { # '!( I K W X z > ? | } 4 5 ~ ! L M > ? ) ` >?) J|>?)>? # '"M%(
ÅÆÁÂZÇÈÉWUkÊBk> o Ë& )*+, ÁÂÌÍÎ Ï Ê Ð B Ñ v)> ? W , £ Ò Ó ÁÂÔÕ&RÖgGH×~ºyW»¼½ b # '$M(( X z >?GH W Ø Ù N i j Ú V G H )*+, Á Â Ô Õ&ÛܬÀ&v Y d G H Á Â Ô Õ Ý ´ Þ o Ø ß G H Á  à # '!&M!!(
úûüý=
!"#$ þ ÿ ! $
!" !"#$ #$%&'(
! " #! $ % &! ' (" ) *! + , -! !#./012345$%!!6789: ;< "!&&&'"#./012345=>?@26AB< !&&&$(
)*CDEFG )*+, HIJKLMNOPQR S T U V W X Y Z [ \] Y Z L Y^_`aUbWXcdefg_hQLijklmnoKpqrs]YZ^tLUVW Xcdfg_u"vwxydmnodz{|_ } K p ~ ` { | ~ L o K p D EL
"#EA;>8C;D;A,>?>4@A63>G4@CH>8C7D)+EB)&I>;F;89!&&&$(&)6;84%
#5)3'-23!)78?;J>@;89C6>;8C>@@2GC>J?4HGK;89 L;C6C;H>MJ>K4N?2G>@G7?;C;78;8C>@D>@>8A>&C6>A788>AC;78 7D:E,&C6>82HO>@7DC;H>MJ>K4N?2G>@G7?;C;7848JG@7G7@C;787D@>A>GC;78C7>H;??;78;?484KN5>J48JJ>J2A>J O4?>J78C6>)*+,J>C>AC;78G@;8A;GK> #+8JC6>8&C7G@7P>C6>@>?2KC7D484KN?;?48JA7HG4@>C6>C6>7@>C;A4K P4K2>L;C6C6>4AC24KP4K2>&C6>82H>@;A4K?;H2K4C;78;?A78J2AC>JD@7HC6>82HO>@7DC;H>MJ>K4N?2G>@G7?;C;78 48JG@7G7@C;787D@>A>GC;78C7>H;??;78#
áâd )*+, ÁÂãZ ä å > ? 6 Ã& æ ç )*+, ÁÂÔÕW è ¯ ° f ` é&ê > ? k l ë nÚVÁÂÔÕì ¡ W > k &¶ i j í î ï Ü ZÇ`éWðÖ{¯°Ah#
9!"#$ #$:;<=>?@AB
9:9!"CD#$< !"#$ #$E: E F G H k l Y Z ñ ò ó ô õ v)Ñ v ö ) )*+, ÁÂ]íÍYZ'!"(&÷ø! ù#
"&!(&0%$"%
IKW )*+, Á Â 6 Ã ~!È ! " # 6 Ã $)+M )*+,%)È!"#,6Ã$STM)*+,%)È ! " # £6Ã $ETM)*+,%# 8 f $ d %&á R )+M )*+, WÁÂ j 8 & ¯ ° 1 2 ` é&STM)*+, ] ETM)*+, Bå'(&áo)*+#