伺服电机和减速机惯量匹配选型软件
伺服电机功率计算选型
连续工作速度 < 电机额定转速
7
举例计算1
已知:圆盘质量M=50kg,圆盘直径 D=500mm,圆盘最高转速60rpm, 请选择伺服电机及减速机。
8
举例计算1
计算圆盘转动惯量 JL = MD2/ 8 = 50 * 2500 / 8 = 15625 kg.cm2 假设减速机减速比1:R,则折算到伺服电机轴上 负载惯量为15625 / R2。
高速度时间200ms,忽略各传送带轮重量,驱动这
样的负载最少需要多大功率电机?
11
举例计算2
1. 计算折算到电机轴上的负载惯量 JL = M * D2 / 4 / R12 = 50 * 144 / 4 / 100 = 18 kg.cm2 按照负载惯量 < 3倍电机转子惯量JM的原则 JM > 6 kg.cm2
= 0.0125 * (1500 * 6.28 / 60 / 0.2) / 0.9 = 10.903 N.m 加速所需总转矩TA = TA1 + TA2 = 12.672 N.m
16
举例计算3
3. 计算电机驱动负载所需要的扭矩 另一种计算所需加速扭矩的方法: TA= 2π* N * (JW + JB) / (60 * t1) / η
14
举例计算3
1. 计算折算到电机轴上的负载惯量 重物折算到电机轴上的转动惯量JW = M * ( PB / 2π)2
= 200 * (2 / 6.28)2 = 20.29 kg.cm2 螺杆转动惯量JB = MB * DB2 / 8 = 40 * 25 / 8 = 125 kg.cm2 总负载惯量JL = JW + JB = 145.29 kg.cm2 2. 计算电机转速 电机所需转速 N = V / PB = 30 / 0.02 = 1500 rpm
伺服步进电机选型计算工具

= 1.299761852 Nm
G=
9.8 m/s
pi=
3.1416
ρ=
7900 kg/m3
JL
=
m(
PB 2
)2
= 0.000474941 kgm2
JB
=
32
LBDB4
= 0.001629402 kgm2
1 mDC2 JC= 8
= 0.00015625 kgm2
JL= JL+JB+JC = 0.002260593 kgm2
2 Nm(Jm Jl)
TS=
60t1
= 0.329821784 Nm
TM= (TL+TS)*S = 3.259167272 Nm
安全系数
S=
2
电机惯量
JM=
0.0002 kgm2
I1= 11.30296356
8)负荷与 减速机惯 量比 当负荷与 电机惯量 比>5时, 考虑采用 减速装 置,提高 惯量匹配
直线运动平 台与负载惯 量
滚珠丝杠惯 量
连轴器惯量
总负荷惯量
启动转矩
5)必须转 矩
必须转矩
6)电机选 择
根据计算, 初步确定电 机型号,然 后输入转子 惯量,确认 TM
7)负荷与 电机惯量 比
丝杠垂 直运动 选型计 算表格
Vl=
24 m/min *
其他常数
M=
30 kg
*
LB=
1.4 m
*
DB=
0.035 m
机械结构 参数:
速度: 滑动部分质 量 丝杠部分长 度 丝杠直径 丝杠导程 连轴器质量 连轴器直径 摩擦系数 移动距离 机械效率 定位时间 加减速时间 比 外力 移动方向与 水平轴夹角
cymex 精密齿轮箱、伺服电机工程计算选型软件
cymex 精密齿轮箱、伺服电机工程计算选型软件
佚名
【期刊名称】《《现代制造》》
【年(卷),期】2009(000)012
【摘要】Wittenstein公司的精密齿轮箱、伺服电机工程计算选型软件cymex 方便于工程师们的设计,提高工作效率,节省时间。
cymex 采取可视化窗口,下拉式菜单操作,界面友好。
软件具有通用模式、齿轮-齿条、丝杆、转台、传送带和皮带轮6种传动模式,7000多个电机,3000多个规格Wittenstein alpha齿轮箱,提供加速、匀速、减速以及复杂工况可供选择。
cymex 可自动创建2D、3D 图纸,生成创建文档,以文档、表格、图表形式提供计算选型报告,动态、直观地显示齿轮箱和电机运行状况。
【总页数】1页(P70)
【正文语种】中文
【中图分类】TP31
【相关文献】
1.精密点焊系统伺服电机的选型 [J], 邵兰娟;曹彪;陈世锋;范丰欣
2.基于伺服电机的齿轮箱传动精度检测系统 [J], 马天文;周建军;张亚平
3.Mathcad在工程计算中的应用--电机减速机选型计算实例 [J],
4.C3I系统工程计算机选型研讨 [J], 秦彦波
5.宁东供水工程计算机监控系统设备选型及配置 [J], 王桂胜;吴福雨;王金山
因版权原因,仅展示原文概要,查看原文内容请购买。
伺服电机和减速机选型
1)确认你的负载额定扭矩要小于减速机额定输出扭矩。
2)伺服电机额定扭矩(乘以)x减速比要大于负载额定扭矩。
3)负载通过减速机转化到伺服电机的转动惯量,要在伺服电机允许的范围内。
4)确认减速机精度能够满足您的控制要求。
5)减速机结构形式,外型尺寸既能满足设备要求,同时能与所选用的伺服电机连接。
除了减速机传动比,输出转矩,输出轴的轴向力,径向力校核;还要看减速机的传动精度,根据工作条件选择。
因为传动精度高价格高,只要电机和减速机配套后满足你的要求(功能和性能),就可以了。
配减速机可以提高扭矩,但是速度下降,所以是否配减速机要综合考虑速度及扭矩两个方面,如移载机上,常见的有以下两种驱动方式:(通过计算得到伺服电机的功率大致合理的范围,不能造成浪费,所以两种驱动方式的电机功率相差不大)A:靠滚珠丝杆传动,伺服电机不配减速机的情况下扭矩就可以满足要求,速度也能满足;配减速机后扭矩的就更大了(造成浪费),但是速度却不能满足,所以一般不配减速机;伺服电机选型:转速(根据需要选择)转矩(根据负载结构和重量以及转速计算需要伺服电机需要输出的力矩)转动惯量(此参数关系伺服在机械结构上的运行精度,通过负载结构重量计算)一般都要留有一定余量,即安全系数。
通过此三个参数结合选型样本来选择伺服电机的型号。
减速机选型:减速比(根据电机的转速与最终需要输出的转速之比以及最终需要输出的转矩与电机转矩之比以及机械转动惯量与电机的转动惯量之比的开方来最终确定)额定承载扭矩(最终的输出扭矩不要大于减速机的额定扭矩,与减速机寿命有关)精度(根据用户需要选择适当的精度要求)安装配合尺寸(负载与减速机之间的配合安装以及电机与减速机之间的配合安装等根据产品图纸来确定)上述便是如何选伺服电机和减速机的一般要确定的参数。
希望帮助到你。
减速机扭矩=9550×电机功率÷电机功率输入转数×速比×使用系数这里的使用系数怎么确定,大概的怎么确定,选的值与实际偏离的不会太多!DKF系列精密伺服减速机时间: 2016-08-16 16:21 点击: 4132 次具有经济实用,性价比高,精度高、钢性好、承载能力大、效率高、寿命长、体积轻小、外观美观、安装方便、定位精准特点。
伺服选型软件使用入手知模型求电机
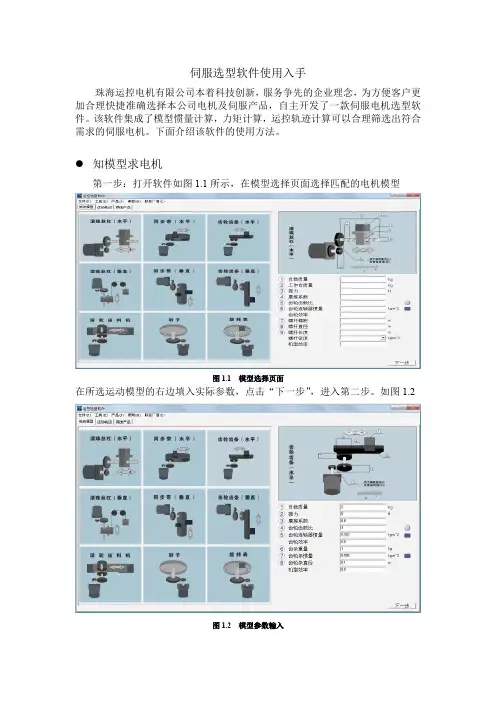
伺服选型软件使用入手珠海运控电机有限公司本着科技创新,服务争先的企业理念,为方便客户更加合理快捷准确选择本公司电机及伺服产品,自主开发了一款伺服电机选型软件。
该软件集成了模型惯量计算,力矩计算,运控轨迹计算可以合理筛选出符合需求的伺服电机。
下面介绍该软件的使用方法。
知模型求电机第一步:打开软件如图1.1所示,在模型选择页面选择匹配的电机模型图1.1模型选择页面在所选运动模型的右边填入实际参数,点击“下一步”,进入第二步。
如图1.2图1.2模型参数输入第二步:在上一步完成的基础上进入,如图1.3所示。
图1.3运动轨迹页面可以在输入方式里面选择“电机转速”,“电机角度”,“负载速度”;选择其中一种,输入参数;白色输入框表示可填,灰色输入框表示显示输入框。
输入框输入完成,将焦点移至其他输入框,关系图会绘制转速跟时间的关系图。
如图1.4;图1.4运动轨迹参数输入第三步:在上一步完成的基础上进入,如图1.5所示。
图1.5筛选产品在这个栏目页面输入电机属性值,驱动器属性值,和其他。
输入完成后,点击“筛选”按钮,推荐电机将显现出来。
如有匹配电机则如图1.6所示;如无匹配电机如图1.7所示。
图1.6筛选产品参数输入有筛选结果图1.7筛选产品参数输入无筛选结果第四步:查看所选电机,双击推荐电机表框里面的电机,进入电机介绍页面,如图1.8.图1.8电机参数解析如上图电机的详细参数页面,可将电动机完整型号及所需数量加入询价单,亦可将配置驱动器型号及所需数量加入询价单。
第五步:点击菜单栏“文件—导出选单”导出询价单,如图1.9图1.9选单导出页面输入必要信息导出xls格式文件至硬盘如图1.A。
图1.A导出文件打开改文件如下图1.B,可将该文件发送给厂家询价,亦可下次打开此软件后点击菜单栏“文件—导入文件”直接导入该文件。
图1.B xls文件内容知功率求电机第一步:打开菜单栏“公司产品—伺服电机”,如图2.1;在电机目录收录了本司总体的伺服电机型号,可通过条件选择和菜单目录筛选出符合要求的电机安装尺寸图为当前所选电机的安装尺寸。
三菱伺服电机对应控制软件
另三菱还有一个容量选择软件capacity selection,用于选择伺服电机型号.三菱伺服软件调试一、软件根本设置1、双击SETUP154C图标——设置——系统设定——机种选择“MR——E——A”;——波特率选择“9600”——串口选择“COM3这是看你自己的计较机口了”——有站号——确定.2、点站号设定:选00站.3、点击参数——进行“参数设定、调整、变动清单显示、详细信息显示”里——点击“参数设定”——参数一览表“批量读取、查对、批量写入、变动清单、详细信息、初期设定、终止”.4、参数写入操纵步调:修改内外相应参数值后——回车——点“写入”.注意:有*好的参数伺服要停电后5S再启.三)、软件调试运行功效(点动运行、定位运行、无电机运行、程序运行)1、试运行1)、点动运行操纵试运行——点动运行——电机转速3000r/min注意设定时不要超出3000转——加加速时间常数1000ms——点正转停止或反转停止便可.2)、定位运行操纵试运行——定位运行——电机转速200r/min注意设定时不要超出3000转——加加速时间常数1000ms——移动量9310720pules——点正转停止或反转停止便可.3)、程序运行操纵试运行——程序运行——点“编辑”——在“程序运行”里点“编辑”——出现“程序运行—编辑”栏,在右边大空白栏里输入以下程序如下:TIMS(3):运行程序3次;SPN(1000):进给转速1000r/min;STC(500):伺服到达额外转速时间500ms;MOV(100000):正转给移动脉冲距离100000PULES;TIM(3) :等待下一步操纵时间3秒;SPN(1000):进给转速1000r/min;STC(500) :伺服到达额外转速时间500ms;MOV(-100000) :正转给移动脉冲距离100000PULES;STOP:停止;按“确定”——反悔程序运行界面——点“启动”这时电机按你编制的程序要求运行.B系列不需要通过软件设置,定位模块会把参数写入到伺服控制器中.。
OMORO伺服电机的选定软件
伺服电机的选定软件可用电脑进行伺服电机选定的选定的电机(Motor Selection Programmer)选定程序f or Windows版」「伺服电机的选定中,由于计算复杂而比较困难」,您是否一直苦恼于此?手工计算的方法,虽然在1314~1320页有「计算公式」,在1321~1322页有「计算举例」,但如果使用本软件,任何人都可以简单地进行电机的选定。
使用电机的机械系统的结构要按照标准进行准备。
标准机械组合举例:滚珠丝杆、齿条及齿轮、台车等或者,还有将机械要素分别逐个组合的方法。
机械要素举例:减速机、齿轮、传送带、辊轴、直接作用负荷、偏心圆板负荷、外力等可以容易地完成动作模式的设定。
此外,在选择电机后,可以用图形显示旋转数及转矩。
因为伺服电机/驱动器的机型数据是作为数据库编入的、因此不是仅输出每个机型的数据,而是可以自动地选定出最适合的电机。
可自动地显示出可与选定的电机组合的驱动器一览、并可自动地进行驱动器的再生能力的判定。
OS :Microsof t Windows 98/2000/XP 日语版处理器:486D X/66MH z以上(推荐Pentium处理器)内存:16MB以上(推荐32MB以上)硬盘:安装时,需要有10MB以上的未使用空间显示器:可使用分辨率为640×480以上的设备(推荐800×600以上)碟片装置:CD-ROM驱动器(仅安装时需要)备有方便电机选定的「电机选定程序」。
请务必使用。
请从欧姆龙的Industrial Web访问。
http://www.f a.omron.co.jp/※进入I-Web成员目录。
请登录后再使用。
伺服电机选定的流程图在垂直负荷及外力转矩作用下,请保留约30%的余量。
计算公式动作模式的计算公式最高速度加减速时间移动距离最高速度加减速时间全部移动时间恒速部分的移动时间全部移动距离加减速部分的移动距离恒速部分的移动距离上升时间在上升时间内移动的距离上升后的速度形成梯形动作模式的条件最高速度上升沿时间形成三角形动作模式的条件最高速度上升沿时间如下所示,进行单位的转换惯量的计算公式负载转矩的计算公式齿条对物体施加外力时的转矩加减速转矩的计算公式加减速转矩(TA)瞬时最大转矩、有效转矩的计算公式瞬时最大转矩(T1)有效转矩(Trms)定位的精度定位精度(AP )直线运动物体的速度与电机的旋转数电机转数计算举例①机械系统的决定∙ 负载质量M=5(kg ) ∙ 滚珠丝杠节距P=10(mm ) ∙ 滚珠丝杠直径D =20(mm ) ∙ 滚珠丝杠质量MB=3(kg ) ∙ 滚珠丝杠摩擦系数 μ =0.1 ∙因无减速器,所以G=1、η=1②动作模式的决定③换算到电机轴负载惯量的计算④负载转矩的计算⑤旋转数的计算转数N⑥电机的初步选定[选自OMNUC U系列的初步选定举例]比换算到电机轴负载转矩大的此值因各系列而异,请加以注意。
伺服电机选型及调试上如何确定惯量匹配
伺服电机选型及调试上如何确定惯量匹配在选择和调试伺服电机时,确定惯量匹配是非常重要的,因为它会直接影响到系统的性能和稳定性。
下面我将详细介绍伺服电机选型及调试上如何确定惯量匹配。
第一步:了解系统需求在进行伺服电机选型和调试之前,首先需要明确系统的需求和要求。
例如,需要知道电机需要驱动的负载类型、负载的惯量大小、所需的运动速度和加速度等。
这些信息将有助于确定合适的伺服电机。
第二步:计算负载的惯量在确定惯量匹配之前,需要计算负载的惯量。
负载的惯量可以通过以下公式进行计算:J=m×r^2其中,J是负载的惯量,m是负载的质量,r是距离轴心的半径。
第三步:选择合适的伺服电机根据系统需求和负载的惯量,选择合适的伺服电机。
通常情况下,伺服电机的惯量应该大于负载的惯量,以确保系统的稳定性和响应性能。
同时,还需要考虑电机的额定功率、转矩和转速等参数是否满足系统需求。
第四步:进行惯量匹配在确定了伺服电机之后,需要进行惯量匹配的调试。
惯量匹配调试的目的是通过调整电机的惯量参数,使得电机的转动惯量与负载的惯量匹配,从而提高系统的性能和稳定性。
一种常用的惯量匹配方法是使用电机驱动器中的惯量参数调整功能。
大多数电机驱动器都具有这样的功能,用户可以通过调整惯量参数来实现惯量匹配。
具体的方法如下:1.连接驱动器和控制器:首先需要将电机驱动器和控制器进行正确的连接,并确保通信正常。
2.设置驱动器参数:根据电机的型号和驱动器的品牌,需要设置一些基本参数,如额定电压、额定电流、转矩限制等。
3.调整惯量参数:根据实际需求,将惯量参数进行逐步调整。
首先可以将惯量参数设置为一个较大的值,然后观察系统的响应和稳定性。
如果系统的响应过于迟钝或者不稳定,可以逐步减小惯量参数的值,直到达到稳定且满意的响应性能为止。
4.测试和优化:在调整完惯量参数之后,需要进行系统的测试和优化。
通过实际运行负载,观察系统的运动轨迹、速度响应和加速度性能等,如果发现不满意的地方,可以根据实际情况进行进一步的调整,直到达到最佳的性能和稳定性。
伺服电机选型--惯量匹配
转载:伺服电机选型--惯量匹配作者:csuzhm标签:IT数码2010-07-29 23:41 星期四晴在伺服系统选型及调试中,常会碰到惯量问题。
其具体表现为:在伺服系统选型时,除考虑电机的扭矩和额定速度等等因素外,我们还需要先计算得知机械系统换算到电机轴的惯量,再根据机械的实际动作要求及加工件质量要求来具体选择具有合适惯量大小的电机;在调试时,正确设定惯量比参数是充分发挥机械及伺服系统最佳效能的前提。
此点在要求高速高精度的系统上表现尤为突出,这样,就有了惯量匹配的问题。
一、什么是“惯量匹配”?1、根据牛顿第二定律:“进给系统所需力矩T = 系统传动惯量J ×角加速度θ角”。
加速度θ影响系统的动态特性,θ越小,则由控制器发出指令到系统执行完毕的时间越长,系统反应越慢。
如果θ变化,则系统反应将忽快忽慢,影响加工精度。
由于马达选定后最大输出T值不变,如果希望θ的变化小,则J应该尽量小。
2、进给轴的总惯量“J=伺服电机的旋转惯性动量JM +电机轴换算的负载惯性动量JL。
负载惯量JL由(以平面金切机床为例)工作台及上面装的夹具和工件、螺杆、联轴器等直线和旋转运动件的惯量折合到马达轴上的惯量组成。
JM为伺服电机转子惯量,伺服电机选定后,此值就为定值,而JL则随工件等负载改变而变化。
如果希望J变化率小些,则最好使JL所占比例小些。
这就是通俗意义上的“惯量匹配”。
二、“惯量匹配”如何确定?传动惯量对伺服系统的精度,稳定性,动态响应都有影响。
惯量大,系统的机械常数大,响应慢,会使系统的固有频率下降,容易产生谐振,因而限制了伺服带宽,影响了伺服精度和响应速度,惯量的适当增大只有在改善低速爬行时有利,因此,机械设计时在不影响系统刚度的条件下,应尽量减小惯量。
衡量机械系统的动态特性时,惯量越小,系统的动态特性反应越好;惯量越大,马达的负载也就越大,越难控制,但机械系统的惯量需和马达惯量相匹配才行。
不同的机构,对惯量匹配原则有不同的选择,且有不同的作用表现。
伺服电机选型计算软件
伺服电机选型计算软件负载质量M(kg)5·滚珠丝杠节距P(mm)10·滚珠丝杠直径D(mm)20·滚珠丝杠质量MB(kg)3·滚珠丝杠摩擦系数μ0.1·因无减速器,所以G=1、η=11②动作模式的决定速度(mm/s)单一变化·负载移动速度V(mm/s)300·行程L(mm)360·行程时间tS(s) 1.4·加减速时间tA(s)0.2·定位精度AP(mm)0.01③换算到电机轴负载惯量的计算滚珠丝杠的惯量JB= 1.50E-04kg.m2负载的惯量JW= 1.63E-04kg.m2换算到电机轴负载惯量JL=JW J=G2x(J W+J2)+J1 1.63E-04kg.m2L④负载转矩的计算对摩擦力的转矩Tw7.80E-03N.m换算到电机轴负载转矩TL=Tw7.80E-03N.m⑤旋转数的计算转数N N=60V/P.G1800r/min⑥电机的初步选定[选自OMNUC U系列的初步选定举例] 选定电机的转子·惯量为负载的JM≥J L/30 5.42E-06kg.m2 1/30*以上的电机选定电机的额定转矩×0.8TMx0.8>T L0.5096>比换算到电机轴负载转矩大的电机N.m*此值因各系列而异,请加以注意。
⑦加减速转矩的计算加减速转矩TA0.165N.m⑧瞬时最大转矩、有效转矩的计算必要的瞬时最大转矩为T1T1=TA+TL0.1726N.mT2=TL0.0078N.mT3=TL-TA-0.1570N.m有效转矩Trms为0.095N.m⑨讨论负载惯量JL 1.63E-04kg.m2≦[电机的转子惯量JM有效转矩Trms0.095N.m﹤[电机的额定转矩瞬时最大转矩T10.1726N.m﹤[电机的瞬时最大转矩必要的最大转数N1800r/min≦[电机的额定转数编码器分辨率R=P.G/AP.S1000(脉冲/转)U系列的编码器规格为204速度(mm/s)3000.210.20.2时间(s)初步选择定R88M-U20030(Jm= 1.23E-05根据R88M-U20030的额定转矩Tm=(N.m)≦[电机的转子惯量JM1.23E-05×[适用的惯量比=30]﹤[电机的额定转矩0.5096N.M7.8E-030.637﹤[电机的瞬时最大转矩 1.528N.M≦[电机的额定转数3000r/minU系列的编码器规格为2048(脉冲/转),经编码器分频比设定至1000(脉冲/转)的情况下使用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
样本允许值 TP050S-MF1-10-0K1 600 240 1335 6130
4500 2100
1FT6105-_SF7_
实际计算值 样本允许值
54.527
86
4.725
25
4212.584
3300
0.000
3000
1.8289 JL m r2
0.000000
0.007144 J1 (JL JG) / i2
基本参数 被移动件的质量 (M) [kg]: 快移速度 [m/min]: 加速时间(ta)[S]: 加速度 (a)[m/s2]: 最大切削抗力 (FC) [N]: 最大抗力时的速度 [m/min]: 摩擦系数 (u): 齿轮模数m 齿轮齿数Z 齿轮斜角a[度] 齿轮分度圆直径 (D) [m]: 齿轮压力角 传动效率η 齿轮受力X2[mm] 水平/垂直运动 重力加速度(g)[m/s2]:
bG n 2
27.56
60 ta
0.00
JG
32
D4L
0.00 TG JG bG
677.62
Ta
Fபைடு நூலகம்
1 1
R
TG
16
0.800
52.94
T2
TG i 2
0.0036
4212.58 n2 n1 i
440.92 bm bG i
1.59 Tm Jmbm
54.53 Tm1 T 2 Tm
19.5283 斜齿轮的斜角 7788.55 F2amax F tga0
0.0812 来自样本 0.0155 由齿轮安装位置决定 0.089127 由齿轮半径决定 2970.56 M2Kmax =F2amax y2 +F2rmax (X2 +Z2 )
计算值
677.62 60.48
2970.56 7788.55 23540.76 4212.58
公式
20000.00 Fa ma 1960.00 f mg
F1 Fa f
21960.00
n V 263.29 D
齿轮角加速度bG[Rad/s2]
齿轮自身惯量JG[Kg.m2] 齿轮损耗的加速力矩TG[N]
合力矩 (Treq) [Nm] 减速比i 减速机效率η2
减速机输入端的加速力矩T2[Nm]: 电机自身转动惯量Jm[Kg.m2]: 电机的最大转速n2[rpm]: 电机角加速度bm[Rad/s2]: 电机克服自身惯量加速的力矩Tm[Nm]: 电机在加速时总的输出力矩Tm1[Nm]:
0.000600 来自样本 16
折算到电机输出端的惯量J2[Kg.m2]: 电机自身惯量Jm[Kg.m2]:
惯量匹配值λ
0.007744 J 2 J1 Jg 0.006100 来自电机样本
1.270 J 2 / Jm
备注
根据电机额定速度倒着推算 考虑减速机的速比和效率
取FKM55 的惯量
考虑速比 考虑速比 力矩等于惯量乘以角加速度 合力矩
考虑减速机的速比和效率
F cos an
=F2amax y2 +F2rmax (X2 +Z2 ) TP050S-MF1-10-0K1
1FT6105-_SF7_ 使用百分比
使用率
113% 25%
223% 127%
94% 0%
63% 19% 128%
减速机选择 减速箱型号 加速力矩[Nm] 额定力矩[Nm] 最大侧倾力矩[Nm] 最大轴向力[N] 最大径向力[N] 最大输入转速[RPM] 额定输入转速[RPM] 电机的选择 电机规格
最大力矩[Nm] 额定力矩[Nm] 最大输入转速[rpm] 额定输入转速[rpm]
惯量匹配计算
负载惯量JL[Kg.m2]: 齿轮惯量JG[Kg.m2]: 折算到减速机输入端的惯量J1[Kg.m2]: 减速机自身惯量Jg[Kg.m2]: 减速比i
0%
切削时:减速机和电机-力和力矩的计算 切削抗力 (Fc) [N]: 摩擦力 (f) [N]: 合力 [N]
力矩 (Tc) [Nm] 电机输出端的额定力矩T3[Nm](减速机输入端)
对应的齿轮转速[rpm]: 电机转速[rpm]:
侧倾力矩的计算
齿轮传递的最大水平切向力 F 齿轮端面压力角an[度] 最大径向力F2rmax
快速移动时:减速机和电机-力和力矩的计算 加速力 (Fa) [N]: 摩擦力 (Ff) [N]:
合力 [N]
齿轮最高转速 (n1) [min-1]
齿轮齿条传动 2000.00 50.00 1.00 10.00
0.00 0.10 3.00 20.00 0.0320 0.06048 20.00 0.98 15.50 水平 9.80
0.00
1960.00 f mg
1960.00 F2 Fc f
Tc F2 R
60.48
1
4.73
T3
i
TG 2
0.00
0.00
21960.00 F
21.116 斜齿轮的端面压力角
23540.76 F2rmax F cos an
斜角a0[度]
最大轴向力F2amax[N] 减速器输出端轴承的支撑跨度Z2 径向力的力臂长x2 轴向力的力臂长y2 侧倾力矩M2Kmax[Nm]