齐次状态方程解
现代控制理论-状态方程的解

3、复频域上
非齐次状态方程的解
2、说明
e At 状态转移矩阵
一般用 t 表示,即 t e At
考虑初始条件拉氏变换
sX ( s ) X (0 ) AX ( s ) BU ( s ) 有 ( sI A) 1 X ( s ) X ( 0 ) BU ( s ) 即 1 X ( s ) ( sI A) X (0) ( sI A) 1 BU ( s ) 则
e
d At e Ae At e At A dt
At 1
e At
[5]、对于 n n的方阵 A、 B 当且仅当 AB BA时 有 e At e Bt e( A B)t , 而当AB BA, e At e Bt e( A B)t。
电气工程学院
几个特殊的矩阵指数eAt
设单变量系统的差分方程为:
y(k n) an1 y(k n 1) a0 y(k ) bnu(k n) bn1u(k n 1) b0u(k )
相应的系统脉冲传递函数为
bn z n bn 1 z n 1 b1 z b0 G( z ) n z an 1 z n 1 a1 z a0
有
d At At AX ] e X e [X dt e At Bu(t )
考虑初始条件 拉氏变换得 sX ( s ) X ( 0 ) AX ( s )
将上式积分有 t t X (t ) 1 ( sI A) 1 X (0) A d A e Bu( ) d d e X ( ) 0 0 d 1 显然 e At 1 t ( sI A) At A X ( 0 ) e X ( t ) e 可得 At Bu( )d
现代控制理论第二章

= α n −1 (t ) An −1 + α n − 2 (t ) An − 2 + ⋯ + α1 (t ) A + α 0 (t ) I
【例2-5】见板书
(3)α i (t )的计算公式 A的特征值互异时 α 0 (t ) 1 λ1 α1 (t ) 1 λ2 ⋮ = ⋮ ⋮ α (t ) 1 λ n −1 n
λ λ λ
பைடு நூலகம்
2 1 2 2
⋮
2 n
⋯ λ e λ1t λ2 t ⋯ λ e ⋮ ⋮ λn t n −1 ⋯ λn e
At
2.变换A为约旦标准型 (1)A特征根互异 Λ = T −1 AT 有
例2-2 ,同例2-1
e At = Te ΛtT −1
(2)A特征值有重根
J = T AT e At = Te JtT −1
0 1 0 [例2 - 3]已知A = 0 0 1 , 求e At 2 - 5 4
若
σ ω A= −ω σ
则
cos ωt sin ωt σt e = Φ(t ) = e − sin ωt cos ωt
At
2.2.4 计算
1.根据 e At 或 Φ (t ) 的定义直接计算
1 2 2 1 33 1 n n e = I + At + A t + A t ⋯ A t + ⋯ 2! 3! k! 1 0 [例2 - 1]已知A = , 求e At − 2 − 3
现代控制理论课后答案

前言
本书是为了与张嗣瀛院士等编写的教材《现代控制理论》相配套而编写的习题解答。
本书对该教材中的习题给予了详细解答,可帮助同学学习和理解教材的内容。由于习题数量较多,难易程度不同,虽然主要对象是研究型大学自动化专业本科学生,但同时也可以作使用其它教材的专科、本科、以及研究生的学习参考书。
书中第5、6、8章习题由高立群教授组织编选和解答;第4、7 章由井元伟教授组织编选和解答,第1、2章由郑艳副教授组织编选和解答。
+
若取 ,则有
(2)解 由(1)知
取 ,则有
若取 ,则有 ,
3.11 求下列系统在输入作用为:① 脉冲函数;② 单位阶跃函数;③ 单位斜坡函数下的状态响应。
(1)
(2)
图P2.2
解 这是一个物理系统,采用机理分析法求状态空间表达式会更为方便。令 为输入量,即 , , 的位移量 , 为输出量,
选择状态变量 , = , = , 。
根据牛顿定律对 有:
对 有:
经整理得:
状态方程为:
输出方程为:
写成矩阵形式为:
2.5 系统的结构如图P2.5所示。以图中所标记的 、 、 作为状态变量,推导其状态空间表达式。其中, 、 分别为系统的输入、输出, 、 、 均为标量。
图P2.5系统结构图
解 图P2.5给出了由积分器、放大器及加法器所描述的系统结构图,且图中每个积分器的输出即为状态变量,这种图形称为系统状态变量图。状态变量图即描述了系统状态变量之间的关系,又说明了状态变量的物理意义。由状态变量图可直接求得系统的状态空间表达式。
(2) 解 由已知得:
,
令: ,
得:
状态变量图如下:
线性控制理论 第2章 状态空间表达式的求解
12t 2 0 2 2 2 t 1 2! 0 2 2 n t
1 2 2 1 t t 0 1 1 2! 1 2 2 1 2 t 2 t 2! 1 2 2 0 1 n t n t 2!
1
1 2 1 m 1 t t 2! (m 1)! t (2-21) 1 2 1 t 2! t 1 mm
证明 因
12 1 1 0 1 2 ,A A 0 1 1 1 mm 21
x(t ) Φ(t ) x(0),t 0
上式表明齐次状态方程的解,在初始状 态确定情况下,由状态转移矩阵惟一确定,
即状态转移矩阵包含了系统自由运动的全部
信息,完全表征了系统的动态特性。
定义2.1
线性定常系统状态转移矩阵 Φ(t t0 ) 是
满足矩阵微分方程和初始条件
(t t ) AΦ (t t ), t t Φ 0 0 0 Φ (t0 t0 ) I
(2-3)
(t ) b1 2b2t kbk t x
( k 1)
k
Ax (t ) A(b0 b1t b2t bk t )
2ቤተ መጻሕፍቲ ባይዱ
比较上式两边t的同次幂可得
《现代控制理论》课后习题答案2
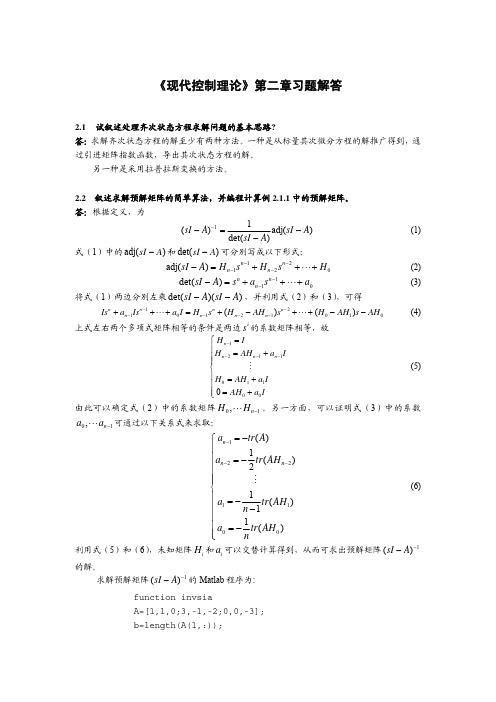
( sI − A) −1 =
1 adj( sI − A) det( sI − A)
(1)
式(1)中的 adj( sI − A) 和 det( sI − A) 可分别写成以下形式:
adj( sI − A) = H n −1s n −1 + H n − 2 s n − 2 + " + H 0 det( sI − A) = s + an −1s
故
Φ (t ) = α 0 (t ) I + α1 (t ) A + α 2 (t ) A2
⎡ −2tet + e 2t ⎢ = ⎢ −2(1 + t )et + 2e 2t ⎢ −2(2 + t )et + 4e 2t ⎣
(3t + 2)et − 2e 2t (3t + 5)et − 4e 2t (3t + 8)et − 8e 2t
n n −1
(2) (3) (4)
+ " + a0
,可得 将式(1)两边分别左乘 det( sI − A)( sI − A) ,并利用式(2)和(3)
Is n + an −1 Is n −1 + " + a0 I = H n −1s n + ( H n − 2 − AH n−1 ) s n − 2 + " + ( H 0 − AH1 )s − AH 0
e jt = a0 (t ) + a1 (t ) j , e − jt = a0 (t ) − a1 (t ) j
而
e jt = cos t + j sin t , e− jt = cos t − j sin t 因此, a0 (t ) = cos t , a1 (t ) = sin t 。由此得到状态转移矩阵 ⎡ cos t sin t ⎤ Φ (t ) = e At = a0 (0) I + a1 (t ) A = ⎢ ⎥ ⎣ − sin t cos t ⎦
现代控制理论基础第二章习题答案
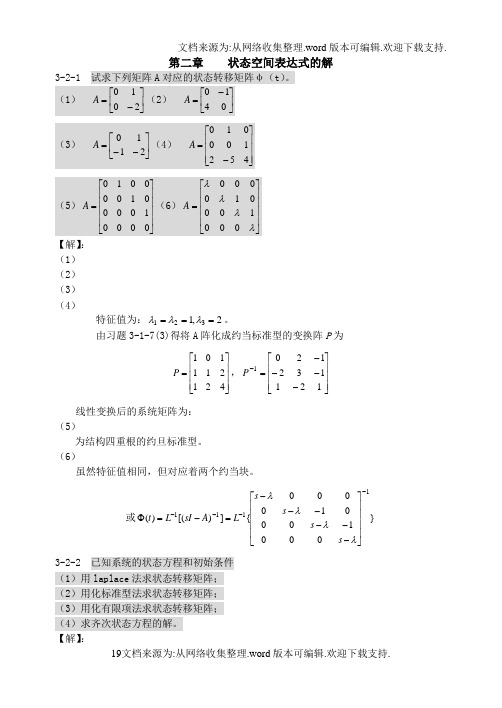
第二章 状态空间表达式的解3-2-1 试求下列矩阵A 对应的状态转移矩阵φ(t )。
(1) ⎥⎦⎤⎢⎣⎡-=2010A (2) ⎥⎦⎤⎢⎣⎡-=0410A (3) ⎥⎦⎤⎢⎣⎡--=2110A (4) ⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-=452100010A (5)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=0000100001000010A (6)⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡=λλλλ000100010000A 【解】:(1) (2) (3) (4)特征值为:2,1321===λλλ。
由习题3-1-7(3)得将A 阵化成约当标准型的变换阵P 为⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=421211101P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=-1211321201P线性变换后的系统矩阵为:(5)为结构四重根的约旦标准型。
(6)虽然特征值相同,但对应着两个约当块。
或}0100010000{])[()(1111----⎥⎥⎥⎥⎦⎤⎢⎢⎢⎢⎣⎡------=-=Φλλλλs s s s L A sI L t 3-2-2 已知系统的状态方程和初始条件 (1)用laplace 法求状态转移矩阵; (2)用化标准型法求状态转移矩阵; (3)用化有限项法求状态转移矩阵; (4)求齐次状态方程的解。
【解】:(1) (2)特征方程为: 特征值为:2,1321===λλλ。
由于112==n n ,所以1λ对应的广义特征向量的阶数为1。
求满足0)(11=-P A I λ的解1P ,得:0110000000312111=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡--P P P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=0011P 再根据0)(22=-P A I λ,且保证1P 、2P 线性无关,解得:对于当23=λ的特征向量,由0)(33=-P A I λ容易求得: 所以变换阵为:[]⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡-==110010001321P P P P ,⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=-1100100011P 线性变换后的系统矩阵为:(3)特征值为:2,1321===λλλ。
线性系统的运动分析
A 有二种标准形式: 对角线矩阵、约当矩阵
(1)当A的特征值 1, 2,, n 为两两相异时:对角线标准型
e1t
0
e At Te AtT1 T
T 1
0
ent
其中: T为使A化为对角线标准型的非奇异变换矩阵。
求状态转移矩阵的步骤:
1) 先求得A阵的特征值 i 。
2) 求对应于 i 的特征向量 pi ,并得到T阵及T的逆阵。
j0
其中: a0(t), a1(t),, an1(t) 为t的标量函数,可按A的特 征值确定。
1) A的特征值 1, 2 ,, n 两两相异时,
注意求逆
a0(t)
1 1
12
n1 1
1
e 1t
a1 ( t )
1
1
22
n1 2
e
2t
an1 ( t )
1
1
2n
n1 n
e
nt
三、几个特殊的矩阵指数函数
(1)设 A diag 1 n ,即A为对角阵且具有互异元素时,
有
e1t
Φt
e2t
0
0
ent
(2)若A能通过非奇异变换为对角阵时,即
T -1AT Λ
e1t
ΦΦ(t)t
T
e2t
0
0
T
-1
(2-9)
ent
1
0
(3)设A为 (n n) 约当阵,即 A
a0
a1
(t (t
) )
1 1
1
1
e
1t
2
e
2t
在第3种方法中已经求得特征根,所以得:
第2章 状态空间表达式求解

1 T 2. 若A能通过非奇异变换予以对角线化,即 AT
则
e1t e At (t ) T 0
e2t
0 T 1 n t e
证明:根据定义式
A2t 2 A3t 3 Ak t k e I At 2! 3! k 0 k! At
A2t 2 A3t 3 ( I At ) A e At A 信息与控制工程学院 2! 3!
5. 性质五
设有nxn矩阵A和B,当且仅当AB=BA 时,有eAteBt
= e(A+B)t ,而当AB≠BA 时,则eAteBt ≠ e(A+B)t 。
证明:根据定义式
e ( A B ) t ( A B ) 2 2 ( A B )3 3 I ( A B )t t t 2! 3! A2t 2 ABt2 BAt2 B 2t 2 I ( A B )t ( ) 2! 2! 2! 2! A3t 3 A2 Bt3 ABAt3 AB2t 3 BA2t 3 BABt3 ( 3! 3! 3! 3! 3! 3! B 2 At3 B 3t 3 ) 3! 3!
2 2 1 t 2! 1 1t 1 k k 2t At e At k 0 k! nt 1 0 0 k k 1 t k! k 0 0 2 2 2t 2!
(t )( ) (t ) (t )( t ) (t t ) I ( )(t ) ( t )
( t )(t ) ( t t ) I
从而证明了(t)与(-t)互为逆
信息与控制工程学院
4. 性质四
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1、齐次状态方程解
【例】已知线性定常系统的齐次状态方程为
x x ⎥⎦
⎤⎢⎣⎡--=3210
试求该状态方程的解。
解 这里我们应用拉氏变换法求系统的状态转移矩阵。
首先计算矩阵
⎥
⎦
⎤⎢⎣⎡+-=⎥⎦⎤⎢⎣⎡---⎥⎦⎤⎢⎣⎡=-3213210
00)(s s s s A sI 其次,计算1
()sI A --及状态转移矩阵()t Φ
⎥⎦⎤⎢⎣⎡--++-=
--s s s s A sI 2133
211
)(1
⎥⎥⎥⎥
⎦
⎤⎢⎢⎢
⎢⎣⎡
++++-+++++=)2)(1()
2)(1(2)2)(1(1)2)(1(3s s s s s s s s s s
⎥⎥
⎥⎦
⎤⎢⎢⎢
⎣⎡++
+-++
+-+-
++-+=2211221221112
112
s s s s s s s s ⎥⎦
⎤
⎢⎣⎡+-+---=-==Φ----------t t t
t t t t
t At
e e e
e e e e e A sI L e
t 222211
2222])[()( 则齐次状态方程的解为
)0(2222)(2222x e e e
e e e e e t x t t t
t t t t
t ⎥⎦⎤
⎢⎣⎡+-+---=-------- 或者
⎪⎪⎭
⎫ ⎝⎛⎥⎦⎤⎢⎣
⎡+-+---=⎪⎪⎭⎫ ⎝⎛--------)0()0(2222)()(21222221x x e e e e e e e e t x t x t t t t t t t
t
2、线性变换例题
【例9.15】已知系统具有如下形式
u y y y y 66116')2()3(=+++
试求此系统对角形式的状态方程。
解 令 y x =1,'2y x =,)
2(3y x =
即 21x x = 32x x
= u x x x x
661163213+---= 写成矩阵—向量形式
u x x x x x x
⎥⎥
⎥⎦
⎤⎢⎢⎢⎣⎡+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡6006116100010321321 (9.76)
[]⎥⎥
⎥⎦
⎤
⎢⎢⎢⎣⎡=321001x x x y
可以看出A 阵为友矩阵,且A 的特征值为
321321-=-=-=λλλ,,
即 321λλλ≠≠ 。
这时我们选转换矩阵P 形式为
⎥⎥
⎥
⎥⎥
⎥⎦
⎤
⎢⎢⎢⎢⎢⎢⎣⎡=---112
11
2
22
2
1
2
1
11
1
n n n n n n P λλλλλλλλλ
n 为相同的阶数,这里n =3。
本题中 ⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡---=921321111
P 令x=Pz
将上式代入(9.42)式,得: Bu APz z P +=
CPz
y Bu P APz P z =+=--11
系统可写为
⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡32132194132111161161000105.05.111435.05.23z z z z z z u ⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---+6005.05.111435.05.23 u z z z z z z
⎥⎥⎥⎦
⎤⎢⎢⎢⎣⎡-+⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡363300020001321321 输出方程为
[][]⎥⎥
⎥⎦
⎤
⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡---=321321111921321111001z z z z z z y
3、状态转移矩阵例题
【例9.18】 已知状态转移矩阵 ⎥⎦
⎤
⎢⎣⎡+-+---=Φ--------t t t
t t t t
t e e e
e e e e e t 22222222)(,试求A 。
解 利用性质(1)、(2),有
⎥⎦⎤⎢⎣
⎡--=⎥⎦⎤⎢⎣⎡--+-+-=Φ==-------3210
442222)0(02222t t t t t t t t
t e e e
e e e e e A 【例9.19】已知状态方程:x x
⎥
⎦
⎤⎢⎣⎡--=3210
,试求状态转移矩阵的逆矩阵)(1t -Φ。
解 已知该齐次状态方程的转移矩阵为:
⎥⎦
⎤
⎢⎣⎡+-+---=Φ--------t t t
t t t t
t e e e
e e e e e t 22222222)(, 利用性质(4)得
⎥⎦
⎤⎢⎣⎡+-+---=-Φ=Φ-t t t
t t t t
t e e e
e e e e e t t 22221
2222)()(
)(1t -Φ还可以根据)(t Φ按一般矩阵求逆矩阵的方法求取。
4、非齐次状态方程解例题
例9.20试求下列状态方程在)(1)(t t u =作用下的解。
101111x x u ⎡⎤⎡⎤=+⎢⎥⎢⎥
⎣⎦⎣⎦,1(0)0x ⎡⎤
=⎢⎥⎣⎦
解 (1) 积分法
已知非齐次状态方程解的形式为
⎰-Φ+Φ=t
d Bu t x t t x 0
)()()0()()(τττ
()1
11
1
12
1
01001()1
111(1)
1t t t s e s t sI A s te e s s -----⎡⎤
⎢⎥
⎧⎫-⎡⎤
⎡⎤
-⎪⎪
⎡⎤Φ=
-===⎢⎥⎨⎬⎢⎥⎢
⎥⎣⎦
--⎢⎥⎣⎦⎣⎦
⎪⎪⎩
⎭
⎢⎥--⎣⎦
在)(1)(t t u =作用下,为了简化计算,令ττ-=t '
,有
⎰Φ-+Φ=0
)()0()()(t
Bd x t t x ’‘ττ
⎰Φ+Φ=t
Bd x t 0
'')()0()(ττ
⎰Φ+Φ=t
Bd x t 0
)()0()(ττ
则: 00101()1t t
t t e e Bd d e
e te τ
τ
τττττ⎡⎤⎡⎤-⎡⎤
Φ==⎢⎥⎢⎥⎢⎥⎣⎦⎣
⎦⎣⎦
⎰⎰ 所以, 10121()02t
t t t
t t t e e e x t te
e te te ⎡⎤⎡⎤⎡⎤
--⎡⎤=+=⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦⎣⎦⎣⎦⎣⎦
(2) 拉氏变换法
()()111
1
()(0)()x t sI A x sI A BU s ----⎡⎤⎡⎤=
-+
-⎣⎦
⎣⎦
()11
112
2
1
10111(0)1
110(1)
1(1)t t e s s sI A x te s s s ----⎡⎤
⎡⎤
⎢⎥
⎢⎥⎡⎤⎡⎤--⎡⎤-=
==⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦
⎢⎥⎢⎥⎣⎦⎣⎦⎢⎥⎢⎥---⎣⎦
⎣⎦
()11
112211
01(1)111()1101(1)1(1)t t s s e s sI A BU s s te s s s ----⎡⎤
⎧⎫⎡⎤
⎢⎥⎪⎪⎢⎥
-⎡⎤-⎡⎤-⎪
⎪⎡⎤⎢⎥-=
==⎢⎥⎨⎬⎢⎥⎢⎥⎣⎦
⎢⎥⎢⎥⎣⎦⎣⎦⎪⎪⎢⎥⎢
⎥--⎪⎪-⎣⎦⎩⎭
⎣⎦
()()
1
1
1
1
21()(0)()2t t e x t sI A x sI A BU s te ----⎡⎤
-⎡⎤⎡⎤=
-+
-=⎢⎥⎣⎦
⎣
⎦⎣⎦。