雷达噪声中的信号检测与CFAR检测
雷达自动检测和CFAR处理方法综述

的参考采样的均值形成前沿和后沿局部估计, 然后对两个局 部估计进行平均或选大或选小或者进行加权平均, 以确定检 测单元 的 背 景 杂 波 平 均 功 率 水 平 估 计, 因此被称为均值
而它 往 往 过 高 地 估 计 了 实 际 杂 波 分 布 的 动 态 范 围, 而
[-4] 。 &56)1*,( 模型的估计又往往过低, A1*BC)) 分布较为准确
一 >’, ? +’285) 分布和 A1*BC)) 分布都是两参数分布。其中, 个参数是反映杂波平均功率的尺度参数, 另一个是反映分布 偏斜度的形状参数。 在模拟如草地和树等地杂波以及象尖海杂波这样的非
; 引
言
在非平稳杂波中, 对于固定阈值检测, 如果杂波平均功 率水平增加几分贝, 虚警概率将急剧增加, 以至于显示器画 面饱和或数据处理设备过载。这时即使信噪比很大, 也不能 做出正确的判决。因此在强干扰中提取信号, 不仅要求有一 定的信噪比, 而且要求检测器具有恒虚警性能。
雷达信号检测的目的是在某个存在干扰的区域内判定 目标是否存在。干扰包括接收机内部热噪声、 地物、 雨雪、 海 浪等杂波, 电子对抗措施 8 人工有源和无源干扰 (如干扰发 射机和金属箔条) , 以及与有用目标混杂在一起的邻近干扰 目标和它的旁瓣 (如采用脉冲压缩的雷达) 。这些干扰在时 间和空间上的变化具有不同的动态范围、 概率分布和相关函 数。 早期的雷达系统是把所有得到的视频信息直接送到显 示器, 将杂波和噪声以及目标回波的幅度变化同时显示出 来, 对目标的检测能力由操作手对显示器的监视决定。现代 雷达系统已经能够完成自动检测和跟踪。在不考虑人的干 预的情况下, 把统计决策理论应用到目标检测问题中便形成 了雷达自动检测理论。在雷达自动检测系统中需要提供一 个检测阈值, 再根据判决准则做出目标是否存在的判决。
雷达信号测试参数指标

雷达信号测试参数指标雷达信号测试是对雷达系统的各项参数进行评估和验证的重要手段。
通过对雷达信号的测试,可以了解雷达系统的性能表现,指导系统的优化和改进。
本文将从不同角度介绍雷达信号测试的参数指标。
1. 信号强度:信号强度是指雷达系统接收到的信号的功率大小。
信号强度的测量可以通过接收到的信号的电压或功率进行评估。
信号强度的大小直接影响雷达系统的探测能力和探测距离,强的信号可以提供更远的探测距离。
2. 信噪比:信噪比是指雷达系统中信号与噪声的功率比。
信噪比的高低直接影响雷达系统的探测能力和探测精度。
信噪比越高,系统的性能越好。
因此,对于雷达信号的测试中,需要评估信噪比的大小。
3. 雷达图像质量:雷达图像质量是指雷达系统生成的图像的清晰度和准确度。
图像质量的好坏直接影响着雷达系统的目标识别和跟踪能力。
在雷达信号测试中,需要评估雷达图像的分辨率、噪声水平、图像畸变等指标。
4. 探测概率和虚警概率:探测概率和虚警概率是评估雷达系统探测性能的重要指标。
探测概率是指雷达系统正确地探测到目标的概率,虚警概率是指雷达系统错误地将噪声或杂波识别为目标的概率。
探测概率和虚警概率的大小直接影响着雷达系统的可靠性和准确性。
5. 目标跟踪精度:目标跟踪精度是指雷达系统对目标的位置、速度等参数估计的准确程度。
目标跟踪精度的高低直接影响着雷达系统的目标追踪能力和目标识别能力。
在雷达信号测试中,需要评估目标跟踪误差、速度估计误差等指标。
6. 可用性和可靠性:可用性和可靠性是评估雷达系统性能的重要指标。
可用性是指雷达系统在给定时间内正常工作的概率,可靠性是指雷达系统在给定时间内完成任务的能力。
可用性和可靠性的高低直接影响着雷达系统的实际应用价值。
7. 频率稳定性:频率稳定性是指雷达系统中发射和接收信号的频率的稳定程度。
频率稳定性的好坏直接影响雷达系统的测量精度和探测距离。
在雷达信号测试中,需要评估雷达系统的频率稳定性。
总结起来,雷达信号测试的参数指标包括信号强度、信噪比、雷达图像质量、探测概率和虚警概率、目标跟踪精度、可用性和可靠性以及频率稳定性等。
雷达信号处理技术在目标识别中的应用教程
雷达信号处理技术在目标识别中的应用教程雷达技术是一种通过发送和接收电磁波来感知和探测目标的无线通信技术。
在雷达系统中,信号处理是非常重要的环节,它能够提取出目标的特征信息,并对目标进行识别。
本文将介绍雷达信号处理技术在目标识别中的应用教程。
一、雷达信号处理的基本流程雷达信号处理是从雷达接收到的回波信号中提取目标信息的过程。
其基本流程可以分为以下几个步骤:回波信号接收、杂波抑制、脉冲压缩、目标检测和跟踪、特征提取和目标识别。
1. 回波信号接收雷达通过发射电磁波,并接收由目标反射回来的回波信号。
回波信号包含了目标的位置、距离、速度等信息。
在接收回波信号时,需要采用合适的天线和接收系统来接收信号,并进行放大和滤波处理。
2. 杂波抑制在接收到的回波信号中,除了目标所反射的信号外,还包含了一些其他无关的杂波信号。
杂波抑制的目的是将这些杂波信号降低到一个较低的水平,以减小对目标的干扰。
常用的杂波抑制方法包括滤波、干扰消除等。
3. 脉冲压缩脉冲压缩是为了提高雷达系统的分辨能力和测距精度而进行的信号处理技术。
当发射的脉冲信号宽度较宽时,可以在接收端利用滤波器对回波信号进行压缩处理,使其变窄,并提高脉冲的能量密度。
4. 目标检测和跟踪目标检测是识别回波信号中是否存在目标的过程。
常用的目标检测算法有恒虚警率检测(CFAR)等。
目标跟踪是在连续的雷达回波信号中追踪目标的位置和运动状态。
常用的目标跟踪算法有卡尔曼滤波、粒子滤波等。
5. 特征提取和目标识别特征提取是从目标的回波信号中提取出与目标特征相关的参数或特征。
可以利用这些特征对目标进行识别。
常用的特征包括目标形状、速度、散射截面等。
目标识别是根据特征将目标与其他物体进行区分和识别的过程。
常用的目标识别算法有支持向量机、神经网络等。
二、雷达信号处理技术的应用雷达信号处理技术在目标识别中有着广泛的应用。
以下是几个典型的应用领域:1. 军事领域雷达在军事领域中起着至关重要的作用。
雷达CFAR检测
虚警概率
0.03
0.02
检测概率
CA-CFAR OS-CFAR
0 2
0
信杂比 (dB)
4
6
8
10
信杂比 AR和OS-CFAR均能保持虚警率恒定,两种检测器检测性能相当。
4. 仿真案例 2、假目标+杂波背景下雷达CFAR检测性能 仿真条件:杂波幅度服从瑞利分布,平均功率为50 ,参考单元数为32,左右参考距离单元内各有一个 假目标,假目标信号强度是真实目标信号强度的4倍 ,虚警概率为10-2,蒙特卡洛仿真次数为5000次。
雷达除了接收目标信号,还会接收噪声、 杂波或干扰信号。这些信号具有随机性,信号 的强度时刻在变化。为此,雷达如何根据杂波、 噪声这些背景信号自适应调整判决门限以保证
雷达具有恒定的虚警概率是雷达CFAR检测的关
键。
1. CFAR检测的概念
检验统计量 虚警概率: Pf f T H 0 dT
x1 x2 xL
参考单元
x
x L 1
xL 2
x2 L
1 2L
门限
比较器 比较器 检测结果
x
待 检 测 单 元
单元平均CFAR(CA-CFAR)检测器
3. CFAR检测器的实现 对数正态分布杂波下的CFAR检测器 对数正态分布:
2 ln x 1 f x exp 2 2 x
x2 x f x 2 exp 2 b 2b
令
zx
2
f z
1 z exp 2 2 2b 2b
噪声平均功率
Pn 2b2
Pf f z dz
多目标环境下跑道异物监测雷达的CFAR检测技术
效地检 测到 了目标。最后 ,进一步讨论 了相关 参数对检测性能 的影响 。 关键词 :多 目标环境 ;跑道异物监 测雷达;剔除平均杂波 图 C F AR;递归滤波
中图分类号 :T P 3 9 1 文献标志码 :A d o i :1 0 . 3 9 6 9  ̄ . i s s n . 1 0 0 3 — 5 0 1 X. 2 0 1 3 . 1 0 . 0 0 8
多 目标 环境下跑道异物监测
雷达 的 C F AR检 测 技 术
吴 静 ,王 洪 ,于 雪莲 ,汪 学刚
(电子科技大学 电子 工程 学院 ,成都 6 1 1 7 3 1 ) 摘要 :强地 杂波下的弱 固定 目标检 测是机场跑道异物监测 雷达 需解 决的关键 问题之一 ,传 统的恒虚 警检 测算法在
第4 O卷第 1 0期
2 0 1 3年 1 0月
光 电工 程
Op t o — El e c t r o n i c En g i ne e r i n g
Vo1 . 40. NO. 1 0 0c t . 201 3
文章编 号 :1 0 0 3 — 5 0 1 x( 2 O 1 3 ) 1 0 — 0 0 4 2 一 O 6
多 目标环境 下会 出现 “ 自屏蔽”效应 ,不能有 效地检 测到 目标。本文提 出了一种剔除平均杂 波图恒虚警检测算 法, 在 分析 系统特性和跑道环境的基础 上 ,结合调频连续 波雷达体制建 立了多 目标 回波信 号模 型。在 剔除若干个样本
值后 ,由余 下的样本值估计背景杂波强度 ,对多次连续扫描测量值作递 归滤 波处理 ,获得 了平稳 的检 测 门限 ,有
CFAR De t e c t i o n Me t ho d i n M u l t i pl e Ta r g e t En v i r o nm e nt s f o r
一种复杂环境下改进的SAR图像双边CFAR舰船检测算法
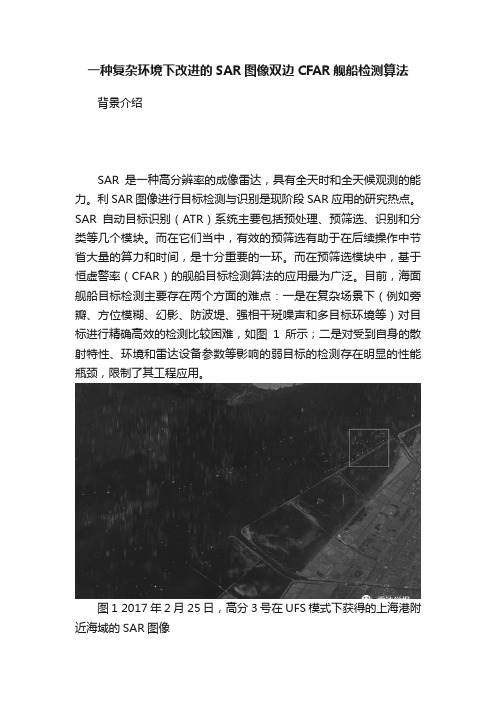
一种复杂环境下改进的SAR图像双边CFAR舰船检测算法背景介绍SAR是一种高分辨率的成像雷达,具有全天时和全天候观测的能力。
利SAR图像进行目标检测与识别是现阶段SAR应用的研究热点。
SAR自动目标识别(ATR)系统主要包括预处理、预筛选、识别和分类等几个模块。
而在它们当中,有效的预筛选有助于在后续操作中节省大量的算力和时间,是十分重要的一环。
而在预筛选模块中,基于恒虚警率(CFAR)的舰船目标检测算法的应用最为广泛。
目前,海面舰船目标检测主要存在两个方面的难点:一是在复杂场景下(例如旁瓣、方位模糊、幻影、防波堤、强相干斑噪声和多目标环境等)对目标进行精确高效的检测比较困难,如图1所示;二是对受到自身的散射特性、环境和雷达设备参数等影响的弱目标的检测存在明显的性能瓶颈,限制了其工程应用。
图1 2017年2月25日,高分3号在UFS模式下获得的上海港附近海域的SAR图像团队工作针对该类问题,合肥工业大学艾加秋副教授等开展了一系列复杂环境下舰船目标检测算法的研究,在对各类CFAR检测器在复杂环境下的检测性能进行详细评估的基础上,设计了一种复杂环境下改进的SAR图像双边CFAR舰船检测算法(Improved Bilateral Constant False Alarm Rate, IB-CFAR)。
首先,针对传统的双边CFAR检测算法在遇到弱目标时容易发生漏检的问题,设计一种非均匀量化方法以提升弱目标内部的像素点间的相似度信息,从而提升舰船检测率;其次,针对双边CFAR在遇到连续的高强度异质点时,所得到的联合图像与实际图像的海况分布相差较远的问题,设计一种自适应强度、空间信息融合模型,将空间相似度、距离向和强度等信息进行融合,在不改变实际海况基本分布的基础上,最大程度地提升目标与周围杂波之间的对比度信息,在进一步提升检测率的同时,对舰船的结构信息进行精细化描述。
在各类复杂环境下提升目标和背景杂波对比度的效果图如图2、3所示。
雷达信号处理中的目标检测与跟踪技术
雷达信号处理中的目标检测与跟踪技术雷达(Radar)是一种利用电磁波进行探测和测距的技术,广泛应用于军事、航空航天以及民用领域。
雷达信号处理中的目标检测与跟踪技术是在雷达应用过程中必不可少的环节,旨在提取目标信息并实现对目标的实时跟踪。
目标检测是雷达信号处理的第一步,其目的是从杂波中识别出目标信号。
在目标检测中,常用的方法有能量检测法、匹配滤波法和统计检测法等。
能量检测法是一种基于信号能量的方法,当接收到的信号能量超过一定阈值时,认为检测到了目标。
匹配滤波法则是将已知目标的参考信号与接收到的信号进行相关运算,通过寻找相关峰值来检测目标。
统计检测法则是基于统计学原理进行目标检测,利用雷达回波信号的统计特性来判断是否存在目标。
目标跟踪是在目标检测的基础上,对目标进行实时跟踪和预测。
雷达目标跟踪技术主要分为两类:点目标跟踪和航迹跟踪。
对于点目标跟踪,通常采用卡尔曼滤波器、扩展卡尔曼滤波器等滤波算法进行实时跟踪。
卡尔曼滤波器通过将目标位置和速度作为状态变量建立状态方程,并结合观测方程对目标进行预测和修正。
扩展卡尔曼滤波器则是对非线性系统进行近似线性化处理,将卡尔曼滤波器扩展到非线性系统上。
而航迹跟踪则是对目标的航迹进行预测和估计,常用的方法有最小二乘法、贝叶斯滤波法等。
在雷达信号处理中,还有一类重要的技术是目标特征提取。
目标特征提取是指从雷达回波信号中提取出与目标特征属性相关的信息。
常用的特征提取方法有时域特征、频域特征和小波变换等。
时域特征是指根据雷达回波信号的幅度、距离延迟、时间间隔等特征进行目标识别。
频域特征则是通过对雷达回波信号进行傅里叶变换,提取出目标的频谱特征。
小波变换则是将时域和频域结合起来,通过不同尺度波形进行目标特征提取。
目标检测与跟踪技术的研究在军事和民用领域有着广泛应用。
在军事领域,雷达目标检测与跟踪技术能够实现对目标的远程监视和侦察,为军事行动提供重要支持。
在民用领域,雷达目标检测与跟踪技术应用于航空交通管制、地震监测和气象预警等方面,对于保障公共安全和提高生活质量具有重要意义。
雷达系统导论第5-6章作业答案概览
5.1(a)求时间宽度为τ、幅度为A 的理想矩形(视频)脉冲的匹配滤波器频率响应函数)(f H (假设脉冲在时间上从2/τ-延伸至2/τ+)。
(b)概画)(f H 对正频率的的幅度。
(c)概画视频匹配滤波器的输出,(直接观察比计算更容易得到结果。
)可以取0=m t 。
解:(a)矩形脉冲的频谱为:)(sin 2)(*2/2/2/2/22f S ff Af j e A dt e A f S ft j ft j ==-==----⎰πτππττττππ 所以,m ft j a e f f A G f H πτπτπ2sin )(-= (b) 概画)(f H 对正频率的的幅度如下:(c) 取0=m t ,概画视频匹配滤波器的输出如下:5.6 在式(5.1)中给出的匹配滤波器频率响应函数表达式里,常数a G 的单位是什么?解:由式(5.1))2exp()()(*m a ft j f S G f H π-=,式中)2exp(m ft j π-部分没有单位,常数a G 的单位是能量的单位的倒数1()VT -。
5.9 (a )画出相关接收机的方框图。
(b )解释为什么在检测性能上相关接收机可以认为等同于匹配接收机。
(c )如果可能,在什么情况下可以选择制造相关接收机而不是匹配接收机?解:(a )输入信号()in y t 首先乘以发射信号的延迟的()R s t T -(R T 是估计的目标回波信号的时延估计值),然后把乘积通过低通滤波器完成积分。
(b )(参看P211)因为匹配滤波器的输出是接收信号和发射信号的互相关函数,所以匹配滤波器和互相关接收机在数学上是等价的,在检测性能上相关接收机可以认为等同于匹配接收机。
(c )在对单一时延R T 检验是否出现目标时,可以选择制造相关接收机而不是匹配接收机。
5.12 证明匹配滤波器的脉冲响应)]()([t t s G t h m a -=是它的频率响应函数)2exp()()(*m a ft j f S G f H π-=的傅立叶变换。
CFAR
摘要雷达恒虚警技术,是雷达设计的关键技术之一。
本论文主要研究了各种恒虚警处理器在多种检测场景的性能分析以及对比。
根据高斯白噪声通过平方律检测器为指数分布的信号模型,仿真产生了目标遮蔽场景,杂波边缘场景。
通过单元平均恒虚警的算法,分析了单元平均恒虚警处理器在上述场景中的性能,研究了一些改进的处理器算法。
针对目标遮蔽效应,设计了单元平均选小恒虚警处理(SOCA CFAR)、审核式恒虚警处理器(Audit CFAR)、排序式恒虚警处理器(OS CFAR)。
针对杂波边缘效应,分别研究了单元平均选大恒虚警处理器(GOCA CFAR)、开关式恒虚警处理器(Switching CFAR)。
完成了算法编程及其评估。
验证了恒虚警算法的有效性和正确性。
研究了一种综合的处理方法VI CFAR处理器,完成了其在杂波边缘场景和目标遮蔽场景和其他处理器的对比分析,验证了这种处理的优点。
关键词恒虚警;检测场景;杂波边缘效应;目标遮蔽效应;单元平均;恒虚警处理器AbstractRadar CFAR technique, is one of the key technology of radar design.This paper mainly studies the various kinds of CFAR processors performance analysis and comparison of detecting scene. Under Gaussian white noise through the square-law detector for signals of the exponential distribution model, and obscured targets the simulation scene, clutter edge scene.Through cell average CFAR algorithms, analysis of cell average CFAR processor performance in the scene above, research a number of improved algorithm for processor. Targeting the shadowing effect, designed the average small selection CFAR processing unit (SOCA CFAR), audit-CFAR processor (Audit CFAR), sort-CFAR processor (OS CFAR). Edge effect for clutter, has studied cell average CFAR processor selection (GOCA CFAR), switch-CFAR processor (Switching CFAR). Completed algorithm programming and its evaluation.Verify the validity and correctness of the CFAR algorithm.Key words Detection of scene Clutter edge effects Target shadowing effects Cell averaging CFAR processor目录摘要 (I)Abstract................................................................................................................ I I第1章绪论 (5)1.1 课题背景 (5)1.2 课题来源、目的和意义 (5)1.3 主要研究内容 (6)1.3.1 均值类CFAR处理算法 (6)1.3.2 有序统计量类CFAR处理算法 (7)1.3.3 删除单元平均的CFAR处理算法 (7)1.4 本文结构 (7)第2章单元平均CFAR (8)2.1 单元平均CFAR的检测场景 (8)2.2 单元平均CFAR的概念 (10)2.2.1 单元平均CFARM门限的推导 (10)2.2.2 单元平均CFAR分析 (12)2.3 恒虚警损失 (13)2.4 单元平均CFAR的局限 (15)2.4.1 目标遮蔽效应 (15)2.4.2 自遮蔽效应 (18)2.4.3 杂波边缘效应 (20)2.5 本章小结 (21)第3章单元平均CFAR的改进算法 (22)3.1 均值类CFAR (22)3.1.1 单元平均选小CFAR (22)3.1.2 单元平均选大CFAR (24)3.1.3 开关式CFAR (26)3.2 有序统计类CFAR (28)3.2.1 排序式CFAR (28)3.2.2 审核式CFAR (31)3.3 一种综合的CFAR (32)3.3.1 VI CFAR原理介绍 (32)3.4 本章小结 (35)第4章CFAR的性能对比 (37)4.1 恒虚警率验证 (37)4.2 目标遮蔽效应下的性能对比分析 (37)4.3 杂波边缘效应下的性能对比分析 (40)4.4 本章小结 (43)结论 (44)致谢 (45)参考文献 (46)第1章绪论1.1课题背景雷达要探测的目标的周围经常存在着各种背景,例如各种地形,云雨,海浪及敌人施放的金属丝干扰等。
基于实测数据的单元平均CFAR检测器性能分析1
(2)
其中,������和������ 是两个参数,式(2)对应的累积分布函数用 G , 表示,对于服从Г分布
M X u 1 u
α
(3)
根据 IID 的假设得到 xi ~ G 1, 和 yi ~ G 1, 。由式(3)可知 CA-CFAR 检测器 中对杂波功率水平的估计 Z ~ G 2n, 。这样就得到 CA-CFAR 检测器的检测概率
均匀杂波背景中CA、GO、SO-CFAR检测器对多目标的检测性能对比曲线(R=8,Pfa=1e-5) 1 0.9 0.8 0.7 0.6
均匀杂波背景中CA、GO、SO-CFAR检测器对多目标的检测性能对比曲线(R=16,Pfa=1e-5) 1 0.9 0.8 0.7 0.6 CA-CFAR GO-CFAR SO-CFAR
Pd( 发现概率 )
Pd( 发现概率 )
0.6 0.5 0.4 0.3 0.2 0.1 0 5 10 15 SNR/dB 20 25 30
0.6 0.5 0.4 0.3 0.2 0.1 0 5 10 15 SNR/dB 20 25 30 SO-CFAR曲线 GO-CFAR曲线 CA-CFAR 曲线
Pd( 发现概率 )
T Pd 1 1
T Pfa
1/2 n
2n
(4)
可由式(4)在������ = 0时得到标称化因子������与虚警概率间的关系,即
1
(5)
从式(4)和式(5)可以看到检测虚警概率和虚警概率不依赖于������ ,因此,CA-CFAR 是具 有恒虚警特性的。 GO-CFAR 主要是针对杂波边缘环境背景下设计的。它取两个局部估计的较大者作为检 测器总的杂波功率水平估计,即有