图书自动小车避障功能的设计
《2024年智能小车避障系统的设计与实现》范文
《智能小车避障系统的设计与实现》篇一一、引言随着科技的发展,智能小车已成为现代社会的重要组成部分。
在许多领域,如工业生产、救援和科研中,智能小车都能发挥出极大的作用。
智能小车的一个核心功能是其避障系统,它可以保障小车在运行过程中的安全性,同时也决定着小车的灵活性和适用性。
本文将介绍一个智能小车避障系统的设计与实现过程。
二、系统设计1. 硬件设计智能小车的硬件部分主要包括小车底盘、电机驱动、传感器等。
其中,传感器部分是避障系统的关键。
我们选择了超声波传感器作为主要的避障传感器,其优点是测量距离准确,且价格适中。
此外,我们还设置了红外线传感器作为辅助,以增加系统的适应性和稳定性。
2. 软件设计软件部分主要涉及传感器的数据处理、小车的运动控制等。
我们采用了模块化的设计思路,将系统分为传感器数据获取模块、数据处理模块、运动控制模块等几个部分。
其中,传感器数据获取模块负责获取传感器的数据,数据处理模块负责处理这些数据并做出判断,运动控制模块则负责根据判断结果控制小车的运动。
三、避障算法的实现避障算法是避障系统的核心。
我们采用了基于超声波传感器和红外线传感器的融合算法。
具体来说,首先通过超声波传感器获取小车与障碍物的距离信息,然后通过红外线传感器获取前方的物体信息。
接着,数据处理模块将两个传感器的数据融合处理,判断出是否存在障碍物以及障碍物的位置。
最后,运动控制模块根据判断结果控制小车的转向和速度。
在算法实现中,我们采用了模糊控制理论。
模糊控制可以处理不确定性的问题,使得我们的避障系统可以应对各种复杂的场景。
同时,我们还采用了PID控制算法来控制小车的速度和转向,以保证小车的稳定性和精度。
四、系统实现与测试我们首先在仿真环境中对避障系统进行了测试。
通过调整算法参数,我们使得小车在仿真环境中能够准确地识别出障碍物并做出相应的反应。
然后,我们在实际环境中对系统进行了测试。
在多种场景下,如光线变化、障碍物形状变化等,我们的智能小车都能稳定地运行,并成功避开障碍物。
基于STM32智能小车避障系统的设计
基于STM32智能小车避障系统的设计一、本文概述随着科技的进步和智能化的发展,智能小车作为一种集成了机械、电子、计算机等多学科知识的移动机器人,逐渐进入人们的日常生活。
智能小车的应用场景广泛,包括智能家居、自动导航、工业巡检等。
然而,智能小车在复杂多变的环境中自主导航时,如何有效地避开障碍物成为了一个关键问题。
因此,本文旨在设计一种基于STM32微控制器的智能小车避障系统,以提高小车的自主导航能力和安全性。
本文将首先介绍智能小车避障系统的研究背景和意义,阐述避障系统在智能小车中的重要作用。
接着,将详细分析现有的避障技术及其优缺点,为后续的系统设计提供理论基础。
在此基础上,本文将提出一种基于STM32微控制器的避障系统设计方案,包括硬件设计和软件设计两部分。
硬件设计将介绍小车的硬件组成、传感器选择及电路连接等;软件设计则重点阐述避障算法的实现和程序编写。
通过本文的研究,期望能够设计出一套高效、稳定的智能小车避障系统,提高小车的自主导航能力和避障性能,为智能小车在实际应用中的推广提供有力支持。
本文的研究成果也可为相关领域的研究人员提供有价值的参考和借鉴。
二、系统总体设计基于STM32的智能小车避障系统设计的总体目标是构建一个能够自主导航、实时感知环境并有效避障的智能小车。
系统主要由STM32微控制器、超声波距离传感器、电机驱动模块、电源管理模块、无线通信模块以及相应的控制算法构成。
系统的硬件设计以STM32微控制器为核心,通过其强大的处理能力和丰富的外设接口实现对超声波距离传感器的数据采集、电机驱动模块的控制以及无线通信模块的数据传输。
超声波距离传感器用于实时测量小车与前方障碍物的距离,为避障决策提供数据支持。
电机驱动模块则负责根据控制算法的输出控制小车的运动状态,包括前进、后退、左转、右转等。
系统的软件设计主要包括控制算法的设计和编程实现。
控制算法的核心是避障策略,根据超声波距离传感器测得的距离数据,通过算法计算得出小车的运动方向和速度,从而实现避障功能。
基于单片机的自动避障小车设计

基于单片机的自动避障小车设计一、本文概述随着科技的发展和的日益普及,自动避障小车作为智能机器人的重要应用领域之一,其设计与实现具有重要意义。
本文旨在探讨基于单片机的自动避障小车设计,包括硬件平台的选择、传感器的配置、控制算法的实现以及整体系统的集成。
本文将首先介绍自动避障小车的背景和研究意义,阐述其在实际应用中的价值和潜力。
接着,详细分析单片机的选型依据,以及如何利用单片机实现小车的避障功能。
在此基础上,本文将深入探讨传感器的选取和配置,包括超声波传感器、红外传感器等,以及如何通过传感器获取环境信息,为避障决策提供数据支持。
本文还将介绍控制算法的设计与实现,包括基于模糊控制、神经网络等先进控制算法的应用,以提高小车的避障性能和稳定性。
本文将总结整个设计过程,展示自动避障小车的实物样机,并对其性能进行评估和展望。
通过本文的研究,旨在为读者提供一个全面、深入的自动避障小车设计方案,为推动相关领域的发展提供有益参考。
二、系统总体设计在自动避障小车的设计中,我们采用了单片机作为核心控制器,利用其强大的数据处理能力和灵活的编程特性,实现了小车的自动避障功能。
整个系统由硬件部分和软件部分组成,其中硬件部分包括单片机、电机驱动模块、避障传感器等,软件部分则包括控制算法和程序逻辑。
硬件设计方面,我们选择了具有高性价比的STC89C52RC单片机作为核心控制器,该单片机具有高速、低功耗、大容量等特点,非常适合用于自动避障小车的控制。
电机驱动模块采用了L298N电机驱动芯片,该芯片具有驱动能力强、稳定性好等优点,能够有效地驱动小车的直流电机。
避障传感器则选用了超声波传感器,通过测量超声波发射和接收的时间差,可以计算出小车与障碍物之间的距离,为避障控制提供数据支持。
软件设计方面,我们采用了模块化编程的思想,将整个控制程序划分为多个模块,包括初始化模块、电机控制模块、避障控制模块等。
在初始化模块中,我们对单片机的各个端口进行了初始化设置,包括IO口、定时器、中断等。
图书自动小车避障功能的设计
斥力为
Fij = K2 / dij
(5)
其中
姨2
2
dij = (xij - xt ) +(yij - yt )
xij 为(i , j)栅格的横坐标;
yij 为(i , j)栅格的纵坐标;
dij 为在二维平面坐标系中第(i , j)栅格距离自动小车的距离。
其在 X 轴方向的虚拟排斥力的矢量形式为
收稿日期:2009- 04- 12 作者简介:曹瑞青(1954—),女,河北邯郸人,图书馆副研究员, 研究方向为文献资源建设和图书流通技术;张 莉(1978—),女,陕西杨陵人,图书
Move_to_goal 方式运动[9],这时仅仅有目标点的吸引力,自动小
车以最快的运动途径向目标点移动。自动小车在 t+1 时刻的
坐标为
xt+1 = xt +
FGx
×S
பைடு நூலகம்
姨2
FGx
+FGy2
yt+1 = yt +
FGy
×S
(10)
姨2
FGx
+FGy2
式中,S 为自动小车的运动步长。
当自动小车视野之内有障碍物时,自动小车按 Avoid_ob-
馆助理馆员,研究方向为图书流通技术。
68
Fijx = (K2 / dij)×
xij - xt
姨2 (xij - xt ) +(yij - yt )2
(6)
其在 Y 轴方向的虚拟排斥力的矢量形式为
Fijy = (K2 / dij)×
yij - yt
姨(xij -
2
xt ) +(yij -
yt )2
循迹避障智能小车设计

循迹避障智能小车设计一、硬件设计1、车体结构智能小车的车体结构通常采用四轮驱动或两轮驱动的方式。
四轮驱动能够提供更好的稳定性和动力,但结构相对复杂;两轮驱动则较为简单,但在稳定性方面可能稍逊一筹。
在选择车体结构时,需要根据实际应用场景和需求进行权衡。
为了保证小车的灵活性和适应性,车架材料一般选择轻质且坚固的铝合金或塑料。
同时,合理设计车轮的布局和尺寸,以确保小车能够在不同的地形上顺利行驶。
2、传感器模块(1)循迹传感器循迹传感器是实现小车循迹功能的关键部件。
常见的循迹传感器有光电传感器和红外传感器。
光电传感器通过检测反射光的强度来判断黑线的位置;红外传感器则利用红外线的反射特性来实现循迹。
在实际应用中,可以根据小车的运行速度和精度要求选择合适的传感器。
为了提高循迹的准确性,通常会在小车的底部安装多个传感器,形成传感器阵列。
通过对传感器信号的综合处理,可以更加精确地判断小车的位置和行驶方向。
(2)避障传感器避障传感器主要用于检测小车前方的障碍物。
常用的避障传感器有超声波传感器、激光传感器和红外测距传感器。
超声波传感器通过发射和接收超声波来测量距离;激光传感器则利用激光的反射来计算距离;红外测距传感器则是根据红外线的传播时间来确定距离。
在选择避障传感器时,需要考虑其测量范围、精度、响应速度等因素。
一般来说,超声波传感器测量范围较大,但精度相对较低;激光传感器精度高,但成本较高;红外测距传感器则介于两者之间。
3、控制模块控制模块是智能小车的核心部分,负责处理传感器数据、控制电机驱动和实现各种逻辑功能。
常见的控制模块有单片机(如 Arduino、STM32 等)和微控制器(如 PIC、AVR 等)。
单片机具有开发简单、资源丰富等优点,适合初学者使用;微控制器则在性能和稳定性方面表现更优,适用于对系统要求较高的场合。
在实际设计中,可以根据需求和个人技术水平选择合适的控制模块。
4、电机驱动模块电机驱动模块用于控制小车的电机运转,实现前进、后退、转弯等动作。
自动避障小车课程设计
自动避障小车课程设计一、课程目标知识目标:1. 让学生掌握自动避障小车的基本原理,理解传感器的工作机制。
2. 使学生了解程序设计的基本流程,掌握基础的编程指令和逻辑控制。
3. 帮助学生理解自动避障小车在实际生活中的应用,了解相关技术的发展趋势。
技能目标:1. 培养学生运用所学知识进行问题分析,设计简单的自动避障小车程序。
2. 提高学生动手实践能力,学会组装和调试自动避障小车。
3. 培养学生团队协作和沟通能力,能够共同完成项目任务。
情感态度价值观目标:1. 培养学生对科学技术的兴趣,激发创新意识和探索精神。
2. 培养学生面对问题积极思考,勇于克服困难,解决问题的积极态度。
3. 培养学生关注社会热点,认识到科技发展对生活的影响,增强社会责任感。
课程性质:本课程为实践性较强的课程,注重理论知识与实际操作的结合。
学生特点:学生为初中生,具备一定的物理知识和逻辑思维能力,对科技产品感兴趣,喜欢动手操作。
教学要求:结合学生特点,课程设计应注重理论与实践相结合,充分调动学生的积极性,提高学生的动手实践能力和创新能力。
在教学过程中,注重引导学生自主学习,培养学生解决问题的能力。
通过课程学习,使学生在知识、技能和情感态度价值观方面得到全面提升。
二、教学内容1. 理论知识:- 介绍自动避障小车的基本原理,涉及传感器、电机驱动、控制单元等组成部分。
- 结合课本相关章节,讲解编程语言基础,如循环结构、条件判断等。
- 分析自动避障小车在实际应用中的例子,探讨其对社会生活的影响。
2. 实践操作:- 指导学生动手组装自动避障小车,熟悉各部件功能及安装方法。
- 教学编程软件的使用,教授如何编写和调试自动避障小车程序。
- 组织学生进行小组合作,共同完成自动避障小车的制作和调试。
3. 教学大纲:- 第一阶段:自动避障小车原理学习,占课程总进度的30%。
- 第二阶段:编程语言学习,占课程总进度的30%。
- 第三阶段:动手实践,占课程总进度的40%。
智能避障小车设计方案

红外线数据协会IrDA(Infrared Data Association)成立于1993年。起初,采用IrDA标准的无线通讯设备仅能在1m范围内在可视范围内的速率仅为115.2Kb/S,但很快就发展到了4Mb/S的速率,后来,速率又达到了16Mb/S。
红外是一种利用红外线进行点对点通信的技术,实现过程中两个设备必须保持在可视范围内是直对的、IrDA也是第一个成功实现无线个人局域网(Personal Area Network,PAN)的技术。目前红外的应用已经发展了20多年,无论是软件还是硬件技术都很成熟,在许多小型移动设备,如PDA\手机上被广泛使用。
3)使用集成芯片进行控制。通过控制集成芯片的使能便可以控制超声波信号的发送,然后集成芯片反馈给控制器的是标准的中断信号,当控制器检测到中断信号发生时,便可以进行超声波距离的计算。
而目前在超声波测距方面应用较多的方案有三种。
1)使用控制器发出40KHz的方波信号,在接收端使用中周将信号放大,然后经过至少两级放大后输入到控制器的模拟输入端,控制器根据接收的信号幅度进而判断是否是回波信号。
2)使用控制器发出40KHz的方波信号,在接收端使用中周将信号放大,然后经过至少两级放大后经过整波电路后变成当有回波信号时,将回波信号转换成低电平信号,这样可以直接连接到处理器的数字引脚,在中断程序中进行回波的判断。
关键词:STM32,无线传输,超声波测距
Intelligent vehicle as appeared in the sci-fi movie scene, at present has been gradually came into our life. From reversing radar, the most simple to the automatic driving now, concept car intelligent has deep social reception, and the intelligent car demand is more and more obvious. How to make the car can automatically unmanned is the main direction of scientific research today.
智能小车避障系统的设计与实现
智能小车避障系统的设计与实现智能小车避障系统的设计与实现智能小车的出现给我们的日常生活带来了极大的便利,然而在路线规划和避障能力方面,我们仍有许多改进和优化的空间。
针对这一问题,我们设计并实现了一款智能小车避障系统,旨在提高小车的自主导航和避障能力,以更好地适应复杂的环境。
首先,我们基于单片机控制系统搭建了整个智能小车避障系统。
该系统包括传感器模块、控制模块和执行模块三部分。
传感器模块采用红外避障传感器和超声波测距传感器相结合的方式,实时感知前方障碍物的距离和方向。
控制模块负责处理传感器模块的数据,并根据预设的避障算法确定小车的运动方向。
执行模块通过驱动直流电机控制小车的前进、后退、左转和右转等动作。
接着,我们对传感器模块进行了优化和改进。
针对现有传感器的局限性,我们使用更高精度的红外避障传感器,有效提高了障碍物的检测准确性和稳定性。
同时,我们还引入了图像识别技术,通过摄像头采集实时图像,利用机器学习算法判断图像中是否存在障碍物,并将结果传递给控制模块进行相应处理。
这种结合传感器和图像识别的方式,大大提高了小车对障碍物的感知能力。
在避障算法的设计上,我们采用了综合考虑距离、速度和方向等因素的全局路径规划算法。
该算法通过计算当前障碍物与小车之间的距离和方向,结合小车的速度和方向信息,选择最佳的绕行路径,以实现高效且安全的避障操作。
同时,我们还引入了动态避障策略,通过对障碍物运动轨迹的预测和实时调整,进一步提升小车的避障能力。
在系统实现方面,我们选择了基于Arduino的开发板作为控制模块,并利用C语言进行编程。
通过编写相应的驱动程序和算法逻辑,我们成功实现了智能小车的避障功能。
在实验中,我们设置了多个不同形状和高度的障碍物,并进行多次避障测试。
结果表明,我们设计的智能小车避障系统能够有效、灵活地避开各类障碍物,实现了自主导航与避障的目标。
综上所述,我们设计并实现了一款智能小车避障系统,通过优化传感器模块、设计全局路径规划算法和引入动态避障策略,成功提高了小车的自主导航和避障能力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Equipment Manufactring Technology No.7,2009书库内的设施和布局,随着图书种类的改变在不断地进行调整。
自动小车在书库内移动时,必须避开书库内的各种设施,而在书库布局多变[1]的情况下,预设固定的移动轨迹显然是不行的。
所以,解决动态不确定环境下的规划、调度和决策,是自动小车控制原理[2]中的首要问题。
图书自动小车避障[2]行为的控制算法,由控制系统的上位机完成。
监测系统的信号处理器[4]从安装在自动小车本体上的超声传感器上获取信息,传送到上位机。
根据控制算法,由上位机调用驱动控制系统的上位机接口函数,向驱动控制板[5]发出控制命令,最后由驱动控制系统向两个驱动轮电动机和导向轮电动机发出控制量,再实现自动小车避障功能的过程。
针对自动小车移动路径随机变化的情况,在避障控制算法的选用中,应该考虑应用虚拟力场法,来使自动小车完成在路径不断变化的条件下的移动,使其尽快地达到工作位置。
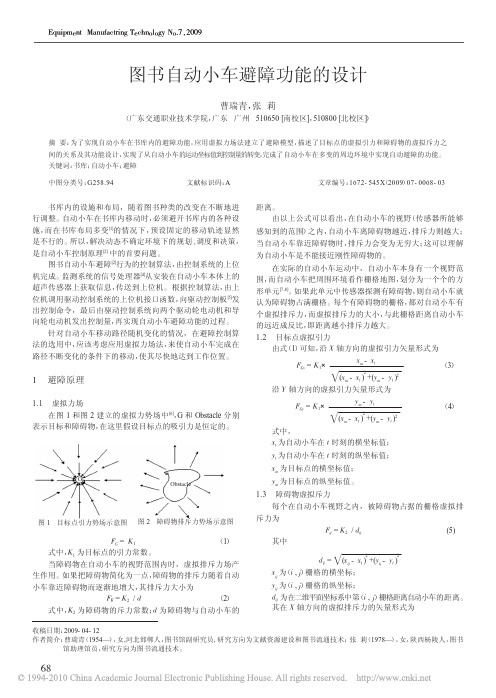
1避障原理1.1虚拟力场在图1和图2建立的虚拟力势场中[6],G 和Obstacle 分别表示目标和障碍物,在这里假设目标点的吸引力是恒定的。
F G =K 1(1)式中,K 1为目标点的引力常数。
当障碍物在自动小车的视野范围内时,虚拟排斥力场产生作用。
如果把障碍物简化为一点,障碍物的排斥力随着自动小车靠近障碍物而逐渐地增大,其排斥力大小为F R =K 2/d (2)式中,K 2为障碍物的斥力常数;d 为障碍物与自动小车的距离。
由以上公式可以看出,在自动小车的视野(传感器所能够感知到的范围)之内,自动小车离障碍物越近,排斥力则越大;当自动小车靠近障碍物时,排斥力会变为无穷大;这可以理解为自动小车是不能接近刚性障碍物的。
在实际的自动小车运动中,自动小车本身有一个视野范围,而自动小车把周围环境看作栅格地图,划分为一个个的方形单元[7~8]。
如果此单元中传感器探测有障碍物,则自动小车就认为障碍物占满栅格。
每个有障碍物的栅格,都对自动小车有个虚拟排斥力,而虚拟排斥力的大小,与此栅格距离自动小车的远近成反比,即距离越小排斥力越大。
1.2目标点虚拟引力由式(1)可知,沿X 轴方向的虚拟引力矢量形式为F Gx =K 1×x m -x t(x m-x t )2+(y m -y t )2姨(3)沿Y 轴方向的虚拟引力矢量形式为F Gy =K 1×y m -y t(xm-x t )2+(y m -y t )2姨(4)式中,x t 为自动小车在t 时刻的横坐标值;y t 为自动小车在t 时刻的纵坐标值;x m 为目标点的横坐标值;y m 为目标点的纵坐标值。
1.3障碍物虚拟斥力每个在自动小车视野之内,被障碍物占据的栅格虚拟排斥力为F ij =K 2/d ij(5)其中d ij =(x ij -x t )2+(y ij -y t )2姨x ij 为(i ,j )栅格的横坐标;y ij 为(i ,j )栅格的纵坐标;d ij 为在二维平面坐标系中第(i ,j )栅格距离自动小车的距离。
其在X 轴方向的虚拟排斥力的矢量形式为图书自动小车避障功能的设计曹瑞青,张莉(广东交通职业技术学院,广东广州510650[南校区],510800[北校区])摘要:为了实现自动小车在书库内的避障功能,应用虚拟力场法建立了避障模型,描述了目标点的虚拟引力和障碍物的虚拟斥力之间的关系及其功能设计,实现了从自动小车的运动坐标值到控制量的转变,完成了自动小车在多变的周边环境中实现自动避障的功能。
关键词:书库;自动小车;避障中图分类号:G258.94文献标识码:A文章编号:1672-545X (2009)07-0068-03收稿日期:2009-04-12作者简介:曹瑞青(1954—),女,河北邯郸人,图书馆副研究员,研究方向为文献资源建设和图书流通技术;张莉(1978—),女,陕西杨陵人,图书馆助理馆员,研究方向为图书流通技术。
ObstacleG图1目标点引力势场示意图图2障碍物排斥力势场示意图68《装备制造技术》2009年第7期F ijx =(K 2/d ij )×x ij -x t(x ij-x t )2+(y ij -y t )2姨(6)其在Y 轴方向的虚拟排斥力的矢量形式为F ijy =(K 2/d ij )×y ij -y t(x ij-x t )2+(y ij -y t )2姨(7)所有在自动小车视野内的栅格的虚拟排斥力在X 轴的矢量和为F RX =ΣF ijx(8)所有在自动小车视野内的栅格的虚拟排斥力在Y 轴的矢量和为F RY =ΣF ijy(9)2自动小车运动行为设计当在自动小车的视野之内没有障碍物时,自动小车按M ove_to_goal 方式运动[9],这时仅仅有目标点的吸引力,自动小车以最快的运动途径向目标点移动。
自动小车在t +1时刻的坐标为x t +1=x t+F GxF Gx 2+F Gy 2姨×Sy t +1=y t +F GyF Gx 2+F Gy 2姨×S(10)式中,S 为自动小车的运动步长。
当自动小车视野之内有障碍物时,自动小车按Avoid_ob-stacle 方式运动[10],这时目标点的虚拟引力及障碍物的虚拟排斥力共同作用,决定自动小车下一步的运动方向。
自动小车的运动速度,随着自动小车与障碍物接近程度的增加而减小。
作用在自动小车虚拟合力沿X 轴方向的矢量和的表达式为F Cx =F Rx +F Gx (11)作用在自动小车虚拟合力沿Y 轴方向的矢量和的表达式为F Cy =F Ry +F Gy (12)则自动小车在t +1时刻运动到的位置的坐标为x t +1=x t+F CxF Cx 2+FCy2姨×S (13)y t +1=y t +F CyF Cx 2+F Cy 2姨×S (14)3自动小车从运动坐标值到控制量的转换算法确定了自动小车避障后的位置坐标后,就需要把这个位置坐标,转换为自动小车驱动电动机速度和位置控制量。
首先,这里假定自动小车本体速度v 在t 时刻到t +1时刻没有变化,自动小车速度和位置的改变,只是左右驱动轮电动机转速和导向轮电机转角的协调。
图3中,1为自动小车在t 时刻的位置,相应坐标是(x t ,y t );2为自动小车在t+1时刻按照避障算法计算应该到达的位置,相应坐标是(x t +1,y t+1);φ为自动小车导向轮电机在避障算法中应该调整的位置角。
由图3的几何关系,可以得出cos φ=x t x t+1+y t y t+1(x t2+yt 2)+(x t+12+y t +12)姨φ=arccos(x t x t+1+y t y t+1(x t2+yt 2)+(x t+12+y t +12)姨)(15)再由式(10)求得v 。
4小自动车控制软件设计进行引力和斥力计算时,只采样位于自动小车头部的传感器,并对Avoid_obstacle 运动方式设置了两种运动步长,控制流程如图4所示。
根据虚拟力场法进行了一系列的自动小车避障实验。
在实验中,按照仿真的环境布置设计了实物避障实验。
在给定自动小车的目标点后,自动小车开始从起点向目标点运动。
当遇到障碍物后,自动小车能够实时的避开障碍最后到达目标点。
实验结果表明,自动小车基于行为的实时避障能力,可以使其很好地适应多变的周边环境。
但是,自动小车在复杂的障碍物环境中(多个障碍物),单纯依靠虚拟力场法将不能避开障碍物而到达目标点,自动小车所遇到的“死锁”问题,同时这与目前自动小车的结构和算法都有关系,还需进一步探讨。
5结束语当自动小车遇到书库内的障碍物时,目标点的虚拟引力及障碍物的虚拟排斥力共同作用,决定自动小车下一步的运动方向。
而且自动小车的运动速度,随着自动小车与障碍物迫近程度的增加而减小,这样可以减小因自动小车运动过快而yy t+1y t12φx tx t+1x图3自动小车的运动坐标值到控制量的转换设置参数启动视野内有障碍?Step=0到达目标点?结束障碍与小车距离小于1/2视野?运动方式Step=0/2运动方式Step=0/4YNYNYN图4图书自动小车的控制程序69Equipment Manufactring Technology No.7,2009Parametric Sensitivity Analysis in Reliability of Coil Tube-springsWANG Shi-peng 1,LIU Jin-gang 2(1.M achining Center Research Institute,Dalian M achine Tool Group,Dalian Liaoning 116620,China;2.Aviation University of Air Force,Changchun 130022,China)Abstract :On the condition of known probabiliatic characteristics of basic random variables,based on the theory of the most probable point perturbation method for reliability design with normal distribution parameters and the theory of sensitivity analysis,reliability sensitivity analysis for coil tube-springs was studied and its numerical method was presented.The respective program can be u sed to obtain the information of reliability sensitivity analysis,and the effects of design parameters on the reliability of coil tube-springs were studied.The method presented in this paper provides theoretical basis for the reliability design of coil tube-s prings.Key words :coil tube-springs;reliability;parametric sensitivity analysisStudy on Obstacle Avoidance to Mobile Robot in GreenhouseCAO Rui-qing ,ZHANG Li(Guangdong Communication Polytechnic,Guangzhou 510800,China,)Abstract:In order to realize the obstacle avoidance function of automatic wheelbarrow in stack room,the model was established by the method of virtual force field,and the relation of virtual force field and virtual repulsion force were described,and it ’s function were designed,and the transforming from the movement coordinate figure of it to controlled quantity was achieved,the automatic obstacle avoidance function of it in the multivariate surrounding environment is completed Key words :stack room;automatic wheelbarrow;avoid block与障碍碰撞的可能性,同时尽可能地以最快的速度驶向目标点。