测角前方交会坐标计算程序
全站仪坐标测量步骤与计算
全站仪坐标测量步骤与计算全站仪是测量工程中常用的一种仪器,它能够同时测量水平角、垂直角和斜距,并能通过内置的计算机进行数据记录和处理。
下面是全站仪的坐标测量步骤与计算过程的详细介绍。
步骤1:设立基点在测量区域内选择一个固定不动的基准点作为基点,通常是在已知的控制点上设立。
这个基点将作为后续测量的基准。
步骤2:放置全站仪将全站仪放置在距离待测点较近的位置上,并通过三脚架固定仪器。
在放置过程中要确保全站仪水平,可以通过调整三脚架的高度和使用气泡管进行水平校准。
步骤3:测量水平角使用全站仪的水平刻度,对准待测点。
通过观察全站仪显示的水平角度,记录下水平角的读数。
在记录之前,最好进行目标中心的精确定位和观察,使数据更加准确。
步骤4:测量垂直角将全站仪的望远镜对准待测点,并使用全站仪上的竖直刻度对准垂直角。
通过观察全站仪显示的垂直角度,记录下垂直角的读数。
同样,在记录之前进行目标中心的精确定位和观察,以确保数据的准确性。
步骤5:测量斜距使用全站仪上的测距仪,对准待测点。
通过观察全站仪上显示的测距结果,记录下斜距的读数。
在记录之前,确保使用的棱镜反光板放置在待测点上,以获得准确的测距结果。
步骤6:数据处理与计算将所测得的水平角、垂直角和斜距数据输入全站仪的内置计算机中进行处理和计算。
全站仪内置的计算机能够根据所输入的数据,计算出测点的坐标。
计算过程主要包含以下几个步骤:1.根据测量的水平角和垂直角,可以计算出待测点相对于基准点的方向角和仰角。
2.根据测量的斜距和方向角,可以计算出待测点与基准点之间的水平距离和垂直距离。
3.结合基准点的已知坐标,可以计算出待测点的绝对坐标。
在实际操作中,需要注意以下几个问题:1.在测量水平角和垂直角时,要保持仪器的稳定和准确。
避免震动和移动,以获得准确的角度读数。
2.在测量斜距时,要确保棱镜反光板正确放置在待测点上,并保持稳定。
避免棱镜反光板的移动导致测距误差。
3.在数据处理和计算过程中,要仔细核对输入的数据,确保准确性。
工程测量坐标怎么算
工程测量坐标的计算方法在工程测量中,确定地物或工程物体的位置和坐标是非常重要的。
通过测量,我们可以确定物体在水平面和垂直面上的位置,计算出其准确的坐标。
本文将介绍工程测量中常用的坐标计算方法。
1. 水平方向坐标计算1.1 几何坐标法几何坐标法主要是通过测量物体在水平面上的距离和方向来确定其坐标。
这种方法适用于小范围测量,通常使用全站仪、经纬仪、电子测距仪等仪器进行测量。
具体步骤如下:1.设置测站:选择一个稳定的点作为测站,并用全站仪或经纬仪记录其坐标作为基准点。
2.目标测量:使用测量仪器测量目标物体与测站之间的水平距离和方向角。
3.计算坐标:根据基准点坐标和测量距离、方向角,利用三角函数计算目标物体的坐标。
1.2 平差计算法平差计算法是一种通过多个测量点之间的相互关系来计算坐标的方法。
该方法适用于大范围的测量,可以消除个别测量误差对结果的影响,提高计算的准确性。
具体步骤如下:1.设置基准点:选择一个已知坐标的点作为基准点。
2.进行测量:使用仪器对各个目标测点进行水平测量,得到其相对于基准点的距离和方向角。
3.建立观测方程:将各个目标测点与基准点之间的距离和方向角建立观测方程。
4.进行平差计算:通过最小二乘法或最小二乘平差法对观测方程进行计算,得到各个目标测点的坐标。
2. 垂直方向坐标计算垂直方向的坐标计算主要是确定物体在垂直方向上的高程。
常用的计算方法有如下两种:2.1 水平法加测高法在这种方法中,首先测量目标物体与基准点的水平距离和方向角,然后测量目标物体的高程差。
通过这些测量数据,可以计算出目标物体的高程。
具体步骤如下:1.设置基准点:选择一个已知高程的点作为基准点。
2.进行水平测量:使用测量仪器测量目标物体与基准点之间的水平距离和方向角。
3.测量高程差:使用水准仪等仪器测量目标物体的高程差。
4.计算目标物体的高程:根据基准点的高程和水平距离、方向角、高程差,利用三角函数计算出目标物体的高程。
交会法测量

B(xB,yB) A(xA,yA) O y
1.距离交会的计算方法
(1)计算已知边的边长和坐标方位角
根据已知点A、B的坐标,按坐标反算公式计算边长 DAB和坐标方位角αAB。
(2)计算∠BAP和 ∠ABP
按三角形余弦定理,得
BAP arccos
2 2 2 D AB D AP D BP 2 D AB D AP 2 2 2 D AB D BP D AP 2 D AB D BP
P x 、 y P P
P x 、 y P P
e x y
2 2
x x p x p
2
y y p y p
C
1
A
1
2
B
e e 容 2 0 .1M
当两组坐标较差符合规定要求时,取其平均值作为 P点的最后坐标。
PA PB PC 1 cot A cot 1 cot B cot 1 cot C cot
C
β
A
α γ
B
式中:
四 、距离交会
A、B为已知控制点,P为待定点,测量了边长 D AP 和D BP ,根据A、B点的已知坐标及边长D AP 和 DBP,通过计算求出P点坐标,这就是距离交会。
yA yB
yP′ yB yC yP″ yP
y
16307.24 16078.90 16226.42 16078.90 16046.65 16226.42 16226.42
0
α2 β1 α1 β2
P
辅 助 计 算
x 0 . 03
e 0 . 03 M 1000
空间前方交会程序使用说明

空间前方交会程序使用说明(一)空间前方交会原理用空间前方交会法测定空间点的三维坐标常用于高精度的工业测量,例如控制装配、整机安装、轴线校正等,这些测量工作往往要求在现场快速给出大量观测点的计算结果。
空间前方交会的原理如图1所示,A 、B 为安置两台精密工业测量经纬仪(或全站仪)的测站中心点,P 1、P 2为长度L 的基准尺的两个端点。
以A 为原点,其天顶方向为Z 轴,AB 的水平方向AB′为X 轴,建立右手独立坐标系A-XYZ ;首先在测站A 、B 点分别观测基准尺两端 P 1、P 2点水平角)2,1(,=i i i βα与天顶距)2,1(,)()(=i Z Z B i A i ,以及AB 间的天顶距(AB 的高差h 未知时),计算基线AB 的长度b ,然后由A 、B 两点对各空间目标进行交会定点。
AZX图1 空间前方交会原理(二)空间前方交会计算公式1.基线尺端点的三维坐标计算若A 、B 两点基线的近似长度为0b ,则根据图1的几何关系,可导得由A 点计算P i 点三维坐标的公式为)sin(cot sin )sin(sin sin )sin(sin cos )(0)(00i i A i i A i i i i i i i i i i i Z b z b y b x βαββαβαβαβα+=+=+= (1)从B 点计算P i 点的z 坐标的公式为h Z b z i i B i i B i ++=)sin(cot sin )(0)(βαα (2)从A 、B 点测定P i 点的z 坐标之差及其平均值为:)()(B i A i i z z z -=∆ (3))(21)()(B i A i i z z z +=(4) 2.两台全站仪间的高差计算两台全站仪横轴之间的高差h 可以用瞄准大致在水平方向的同一个目标,分别用三角高程测量的方法测定其高差,按两台仪器测得高差之差计算h 。
3.测站中心点间的基线长度计算由基准尺的两个端点P 1、P 2的坐标可求得计算基准尺的计算长度为:2212212210)()()(z z y y x x L -+-+-= (5)如果基准尺水平安置,则可用下式计算;2212210)()(y y x x L -+-= (6)因基准尺精确长度L 已知,可按下式计算基线精确长度,L Lb b = (7) 4.目标点三维坐标计算求得了基线的精确长度b ,可交会计算任何目标点的三维坐标,为了便于计算器的程序编制,计算公式(1)、(2)进行改写如下:)sin(sin )sin(sin i i iB i i iA bD b D βααβαβ+=+= (8)iA i i A i D y D x ααsin cos == (9)hZ D z Z D z B i B B i A i A A i +÷=÷=)()()()(tan tan (10)(三)空间前方交会计算LISP程序设计根据空间前方交会计算的特点:(1)从两个测站向目标点观测水平角和天顶距的前方交会计算需要多次进行;(2)每个角度的“度.分秒”记录数值都需要化为弧度单位才能在LISP程序中运算;(3)读取文件中的每一行角度观测值(水平角和天顶距)均以字符形式记录,需要分段区分并作数据的类型转换。
导线测量的坐标增量闭合差和前方交汇测量步骤
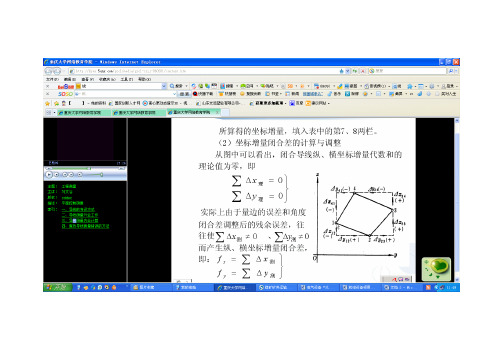
导线的外业测量步骤:导线的内业测量计算:环形导线一、导线的布设方式导线测量布设灵活,要求通视方向少,边长可直接测定,适宜布设在任何地区,如城市、厂区、矿山建筑区、森林、铁路、隧道、渠道等。
随着全站仪的普及,一个测站可同时完成测距、测角,导线测量方法广泛地用于控制网的建立。
导线测量的布设的基本形式有以下几种:1、闭合导线起讫于同一已知点的导线,称为闭合导线,也称环形导线。
如6-3所示,导线从已知点B出发,经过待定点P1、P2、P3、P4、…,最后仍回到出发点B,形成一闭合多边形。
由于它本身具有严密的几何条件,因此能起检核作用。
故闭合导线不但适用于平面控制网的加密,也适用于独立测区的首级平面控制。
2、附合导线敷设在两个已知点和两个已知方向之间的导线称为附合导线。
如6-4所示,它由已知点B和已知方向αA B出发,经过待定点P1、P2、P3、……而附合到已知点C和已知方向αC D。
这种布设形式,具有检核观测成果的作用,常用于平面控制网的加密。
3、支导线二、导线测量外业工作导线测量的外业工作包括:踏勘选点及建立标志、量边、测角和联测,现分述如下:1、踏勘选点及建立标志选点前,应调查收集测区已有的地形图和高一级的控制点的成果资料,把控制点展绘在地形图上,然后在地形图上拟定导线的布设方案,最后到野外去踏勘,实地获得、修改、落实点位和建立标志。
如果测区没有地形图资料,则须详细踏勘现场,根据已知控制点的分布、测区地形条件及测图和施工需要等具体情况,合理的选定导线点的位置。
实地选点时,应注意以下几点:(1)相邻点间通视良好,地势较平坦,便于测角和量距;(2)点位应选在土质坚实处,便于保存标志和安置仪器;(3)视野开阔,便于施测碎部;(4)导线各边的长度应大致相等,避免过长、过短,相邻边长之比不应超过三倍;(5)导线点应有足够的密度,分布较均匀,便于控制整个测区。
导线点选定后,应在地面上建立标志,并沿导线走向顺序编号,绘制导线略图。
前方交会法
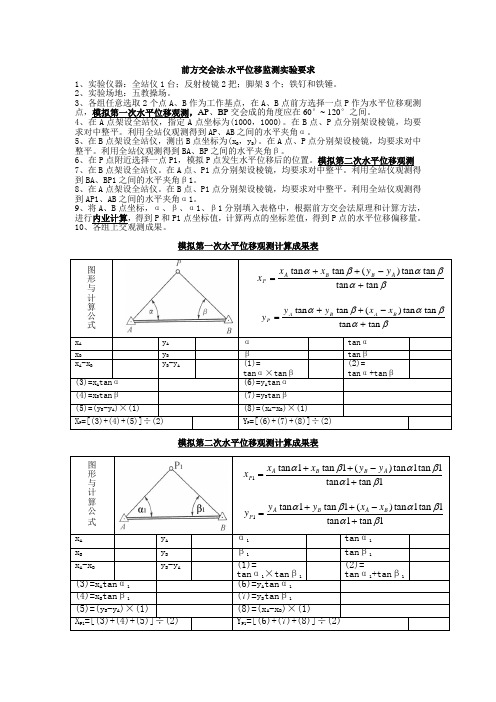
前方交会法.水平位移监测实验要求
1、实验仪器:全站仪1台;反射棱镜2把;脚架3个;铁钉和铁锤。
2、实验场地:五教操场。
3、各组任意选取2个点A、B作为工作基点,在A、B点前方选择一点P作为水平位移观测点,模拟第一次水平位移观测,AP、BP交会成的角度应在60°~ 120°之间。
4、在A点架设全站仪,指定A点坐标为(1000,1000)。
在B点、P点分别架设棱镜,均要求对中整平。
利用全站仪观测得到AP、AB之间的水平夹角α。
5、在B点架设全站仪,测出B点坐标为(x B,y B)。
在A点、P点分别架设棱镜,均要求对中整平。
利用全站仪观测得到BA、BP之间的水平夹角β。
6、在P点附近选择一点P1,模拟P点发生水平位移后的位置。
模拟第二次水平位移观测
7、在B点架设全站仪。
在A点、P1点分别架设棱镜,均要求对中整平。
利用全站仪观测得到BA、BP1之间的水平夹角β1。
8、在A点架设全站仪。
在B点、P1点分别架设棱镜,均要求对中整平。
利用全站仪观测得到AP1、AB之间的水平夹角α1。
9、将A、B点坐标,α、β、α1、β1分别填入表格中,根据前方交会法原理和计算方法,进行内业计算,得到P和P1点坐标值,计算两点的坐标差值,得到P点的水平位移偏移量。
10
模拟第一次水平位移观测计算成果表
模拟第二次水平位移观测计算成果表
y。
角度、坐标测量计算公式细则

计算细则1、坐标计算:X1=X+Dcosα,Y1=Y+Dsinα。
式中 Y、X为已知坐标,D为两点之间的距离,Α为方位角。
2、方位角计算:1)、方位角=tan=两坐标增量的比值,然后用计算器按出他们的反三角函数(±号判断象限)。
2)、方位角:arctan(y2-y1)/(x2-x1)。
加减180(大于180就减去180(还大于360就在减去360)、小于180就加180 如果x轴坐标增量为负数,则结果加180°。
如果为正数,则看y轴的坐标增量,如果Y轴上的结果为正,则算出来的结果就是两点间的方位角,如果为负值,加360°。
S=√(y2-y1)+(x2-x1),1)、当y2-y1>0,x2-x1>0时;α=arctan(y2-y1)/(x2-x1)。
2)、当y2-y1<0,x2-x1>0时;α=360°+arctan(y2-y1)/(x2-x1)。
3)、当x2-x1<0时;α=180°+arctan(y2-y1)/(x2-x1)。
再用两点之间的距离公式可算距离(根号下两个坐标距离差的平方相加)。
拨角:arctan(y2-y1)/(x2-x1)1、例如:两条巷道要互相平行掘进的话,求它们的拨角:方法(前视边方位角减后视边方位)在此后视边方位要加减180°,若拨角结果为负值为左偏“逆时针”(+360°就可化为右偏,正值为右偏“顺时针”。
2、在图上标识方位的方法:就是导线边与Y轴的夹角。
3、高程计算:目标高程=测点高程+?h+仪器高—占标高。
4、直角坐标与极坐标的换算:(直角坐标用坐标增量表示;极坐标用方位角和边长表示) 1)、坐标正算(极坐标化为直角坐标)已知一个点的坐标及该点至未知点的距离和方位角,计算未知点坐标方位角,知A(Xa,Ya)、Sab、αab,求B(Xa,Ya)解:?Xab=Sab×COSαab 则有Xb=Xa+?Xab?Yab=Sab×SINαab Yb=Ya+?Yab2)、坐标反算,已知两点的坐标,求两点的距离(称反算边长)和方位角(称反算方位角)的方法已知A(Xa,Ya)、B(Xb,Yb),求αab、Sab。
立体像对空间前方交会解算流程

立体像对空间前方交会解算流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by the editor. I hope that after you download them, they can help yousolve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!In addition, our shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts,other materials and so on, want to know different data formats and writing methods, please pay attention!立体像对空间前方交会解算流程是一项重要的测量技术,用于测量和计算地球或宇宙空间中不同图像之间的空间位置和方向关系。