第五章_刚体力学_习题解答
第四角动量守恒五章刚体力学

例1 :一质量为m,长为L的匀质细杆,在水平面内绕端点O的铅直
轴 为转μ。动求,(如1图)所细示杆,所若受初的始摩角擦速力度矩为Mf;o,(杆2)与若水细平杆面只的受摩此擦摩系擦数
T1
2m2m1 g m1 m1 m2
Mf R
a
(m1
m2 )g
Mf R
m1 m2
T2
2m1m2 g m2 m1 m2
Mf R
若 M f 0, m 0, 则有:
a m1 m2 g m1 m2
T1
T2
2m1m2 m1 m2
g
例 题5 : 一质量为 m半径为R的匀质圆盘,以角速度 0绕垂直于盘 面的中心轴旋转,如图所示。今将该圆盘置于水平面上,其间的
摩擦系数为 ,问圆盘转动多长时间停止。
解: 设 0 的方向为正
0
前面例题已求出圆盘所受的的摩擦力矩:
Mf
2 mgR
3
mO R
由转动定律 M J 得:
M f 2 m g R 1m R 2 4 g
J
3
2
3R
∴ 是匀变速转动, 由 0 t , 令 0 得:
t 0
0 3R0 4 g / 3R 4 g
当 0 时, 2
由 M J 得:
⑵ 由 M J 得:
t
k
0J
dt
0
Mf
k ( 0
2
)2
,
k ( 0 )2 J ,
2
k 2
J
J
d
d 2
,
k
dt
t
(
J
1
k
2 0
4J
1 ),
0
J0 , 令 0得:
《大学物理》刚体力学练习题及答案解析

《大学物理》刚体力学练习题及答案解析一、选择题1.刚体对轴的转动惯量,与哪个因素无关 [ C ](A)刚体的质量(B)刚体质量的空间分布(C)刚体的转动速度(D)刚体转轴的位置2.有两个力作用在一个有固定轴的刚体上. [ B ](1)这两个力都平行于轴作用时,它们对轴的合力矩一定是零;(2)这两个力都垂直于轴作用时,它们对轴的合力矩可能是零;(3)这两个力的合力为零时,它们对轴的合力矩也一定是零;(4)当这两个力对轴的合力矩为零时,它们的合力也一定是零.在上述说法中,(A)只有(1)是正确的;(B) (1)、(2) 正确, (3)、(4)错误;(C) (1)、(2)、(3)都正确, (4)错误;(D) (1)、(2)、(3)、(4)都正确.3.均匀细棒OA可绕通过其一端O而与棒垂直的水平固定光滑轴转动,今使棒从水平位置由静止开始自由下落,在棒摆动到竖立位置的过程中,下述说法哪一种是正确的[ A ](A) 角速度从小到大,角加速度从大到小;(B) 角速度从小到大,角加速度从小到大;(C) 角速度从大到小,角加速度从大到小;(D) 角速度从大到小,角加速度从小到大.4.如图所示,圆锥摆的小球在水平面内作匀速率圆周运动,小球和地球所组成的系统,下列哪些物理量守恒( C )(A)动量守恒,角动量守恒(B)动量和机械能守恒(C)角动量和机械能守恒(D)动量,角动量,机械能守恒5.一圆盘绕通过盘心且垂直于盘面的水平轴转动,轴间摩擦不计,如图射来两个质量相同,速度大小相同、方向相反并在一条直线上的子弹,它们同时射入圆盘并且留在盘内,在子弹射入后的瞬间,对于圆盘和子弹系统的角动量L以及圆盘的角速度ω则有( B )(A)L不变,ω增大(B)L不变,ω减小(C)L变大,ω不变(D)两者均不变6.一花样滑冰者,开始自转时,其动能为20021ωJ E =。
然后他将手臂收回,转动惯量减少为原来的1/3,此时他的角速度变为ω,动能变为E ,则下列关系正确的是( D ) (A )00,3E E ==ωω (B )003,31E E ==ωω (C )00,3E E ==ωω (D )003,3E E ==ωω1C 2.B ,3.A ,4.C ,5.B ,6.D二、填空1.当刚体受到的合外力的力矩为零时,刚体具有将保持静止的状态或_____________状态,把刚体的这一性质叫刚体___________。
第05章刚体力学基础学习知识补充
第五章 刚体力学基础一、选择题1 甲乙两人造卫星质量相同,分别沿着各自的圆形轨道绕地球运行,甲的轨道半径较小,则与乙相比,甲的:(A)动能较大,势能较小,总能量较大; (B)动能较小,势能较大,总能量较大; (C)动能较大,势能较小,总能量较小;(D)动能较小,势能较小,总能量较小;[ C ]难度:易2 一滑冰者,以某一角速度开始转动,当他向内收缩双臂时,则: (A)角速度增大,动能减小; (B)角速度增大,动能增大; (C)角速度增大,但动能不变;(D)角速度减小,动能减小。
[ B ]难度:易3 两人各持一均匀直棒的一端,棒重W ,一人突然放手,在此瞬间,另一个人感到手上承受的力变为:(A)3w ; (B) 2w (C) 43w; (D) 4w 。
[ D ]难度:难4 长为L 、质量为M 的匀质细杆OA 如图悬挂.O 为水平光滑固定转轴,平衡时杆竖直下垂,一质量为m 的子弹以水平速度0v 击中杆的A 端并嵌入其内。
那么碰撞后A 端的速度大小:(A)M m mv +12120; (B) Mm mv +330;(C) Mm mv +0; (D) M m mv +330。
[ B ]难度:中L5 一根质量为m 、长为l 的均匀直棒可绕过其一端且与棒垂直的水平光滑固定轴转动.抬起另一端使棒竖直地立起,如让它掉下来,则棒将以角速度ω撞击地板。
如图将同样的棒截成长为2l的一段,初始条件不变,则它撞击地板时的角速度最接近于:(A)ω2; (B)ω2; (C) ω; (D) 2ω。
[ A ]难度:难6 如图:A 与B 是两个质量相同的小球,A 球用一根不能伸长的绳子拴着,B 球用橡皮拴着,把它们拉到水平位置,放手后两小球到达竖直位置时绳长相等,则此时两球的线速度:(A)B A v v = (B) B A v v < (C) B A v v > (D)无法判断。
[ C ]难度:中7 水平圆转台上距转轴R 处有一质量为m 的物体随转台作匀速圆周运动。
第五章刚体定轴转动典型题型

• 例3一质量为m,半径为R的均匀圆盘,求 通过中心o并与盘面垂直的轴的转动惯量
• 例4一半径为R的光滑置于竖直平面内,一 质量为m的小球穿在圆环上,并可在圆环 上滑动,小球开始 时静止于圆环上的电 A(该点在通过环心o的水平面上),然 后从A点开始下滑,设小球与圆环间的摩 擦略去不计。求小球滑到点B时对环心o 的角动量和角速度。
O
A
质点运动与钢体定轴转动对照表
质点运动
速度
v dr / dt
加速度 a dv / dt
力
F
钢体定轴转动
角速度 d / dt
角加速度 d / dt
力矩
M
质量 m
转动惯量 J
动量 p mv
角动量 L J
牛二律 F m a
F dp / dt
转动定律 M J
M dL / dt
第五章 刚体定轴转动
• 例1一飞轮半径为0.2m,转速为150r/min, 因受到制动二均匀减速,经30s停止转动, 试求:
1)角加速度和在此时间内飞轮所转的圈数
2)制动开始后t=6s时飞轮的角速度
3) t=6s时飞轮边缘上一点的线速度,切线 加速度和法线加速度。
• 例2一质量为m,长为的均匀细长棒,求 1)通过其中心并于棒垂直的转动惯量 2)通过棒端点并与棒垂直的轴的转动惯量
角加速度( )
• 例8 质量为M,半径为R的转台,可绕过 中心的竖直轴无摩擦的转动。质量为m的 一个人,站在距离中心r处(r<R),开 始时,人和台处于静止状态。如果这个人 沿着半径为r的圆周匀速走一圈,设它相 对于转台的运动速度为u,求转台的旋转 角速度和相对地面的转过的角度。
r
R
• 5)角动量守恒定律和机械能守恒定律的综 合应用
刚体力学参考答案

mg —sin f A l sin三个独立方程有四个未知数,不能唯一确定。
【提示】:把三者看作同一系统时,系统所受合外力矩为零,系统角动量守恒。
设L 为每一子弹相对与 O 点的角动量大小,3为子弹射入前圆盘的角速度,3为子弹射入第五章刚体力学参考答案(2014)—、选择题[C ]1、【基础训练2】一轻绳跨过一具有水平光滑轴、质量为 M 的定滑轮,绳的两端分别 悬有质量为 m 和m 的物体(m v m ),如图5-7所示•绳与轮之间无相对滑动•若某时刻滑轮 沿逆时针方向转动,则绳中的张力 (A)处处相等. (B) 左边大于右边. (C)右边大于左边. (D) 哪边大无法判断. 【提示】:逆时针转动时角速度方向垂直于纸面向外 ,由于m v m ,实际上滑轮在作减 速转动,角加速度方向垂直纸面向内 ,设滑轮半径为 R,受右端绳子向下拉 力为T 2,左端绳子向下拉力为 T i ,对滑轮由转动定律得:(T 2-T I )R=J [D ]2、【基础训练3】如图5-8所示,一质量为 m 的匀质细杆AB 壁上,B 端置于粗糙水平地面上而静止•杆身与竖直方向成 角,则 1 1(A)为 mg pos . (B) 为 mg g4 2 (C) 为 m®n m2m 1图5-7 A 端靠在粗糙的竖直墙 A 端对墙壁的压力大 .(D) 不能唯一确定 图5-8■:::;SKB 【提示】: 因为细杆处于平衡状态,它所受的合外力为零,以 B 为参考点,外力矩也是平衡的,则有:NAfBAN B mgN A lcon[C]3、基础训练(7) 一圆盘正绕垂直于盘面的水平光滑固定轴 两个质量相同,速度大小相同,方向相反并在一条直线上的子弹, 内,则子弹射入后的瞬间,圆盘的角速度 (A) 增大. (C)减小. (B) (D)不变. 不能确定. O 转动,如图5-11射来子弹射入圆盘并且留在盘m<J 为圆盘的转动惯量,J 子弹为子弹转动惯量,据角动量守恒[C ]4、【自测提高4】光滑的水平桌面上,有一长为 2L 、质量为m 的匀质细杆,可绕过其 中点且垂直于杆的竖直光滑固定轴 0自由转动,其转动惯量为 [mL ,起初杆静止•桌面上3有两个质量均为 m 的小球,各自在垂直于杆的方向上, 正对着杆的一端, 以相同速率v 相向运动,如图5-19所示•当两小球同时与杆的两个端点发生完全非弹性碰撞后,就与杆粘在 一起转动,则这一系统碰撞后的转动角速度应为…、 2v4v 6v 8v 12v (A)(B)• (C)• (D)(E)•3L5L7L9L7Lv y$ vO俯视图图 5-19【提示】:视两小球与细杆为一系统, 碰撞过程中系统所受合外力矩为零, 满足角动量守恒条件, 所以2 21 2lmv lmv [ml ml m(2l)]12可得答案(C )[A ] 5、【自测提高7】质量为m 的小孩站在半径为 R 的水平平台边缘上•平台可以绕通过 其中心的竖直光滑固定轴自由转动,转动惯量为 J .平台和小孩开始时均静止•当小孩突然 以相对于地面为 v 的速率在台边缘沿逆时针转向走动时, 旋转方向分别为【提示】:视小孩与平台为一个系统,该系统所受的外力矩为零,系统角动量守恒:一 ,口 Rmv mR 2,v 、0 Rmv J 可得 ---------------- ------ (一)。
第五章_刚体力学_习题解答
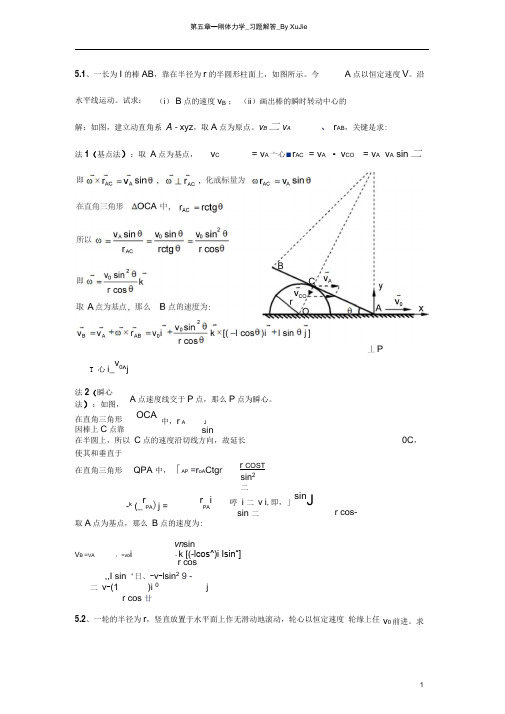
5.1、一长为I 的棒AB ,靠在半径为r 的半圆形柱面上,如图所示。
今A 点以恒定速度V 。
沿水平线运动。
试求:(i ) B 点的速度v B ; (ii )画出棒的瞬时转动中心的解:如图,建立动直角系 A - xyz ,取A 点为原点。
v B 二v A 、 r AB ,关键是求:法1(基点法):取 A 点为基点,v C= v A 亠心■ r AC = v A • v CO = v A v A sin 二丄PT 心i_v 0^j法2(瞬心法):如图,因棒上C 点靠在半圆上,所以 C 点的速度沿切线方向,故延长0C ,使其和垂直于取A 点为基点,那么 B 点的速度为:vn sinV B =VA,=vo i- k [(-lcos^)i Isin“] r cos°,,I sin ‘日、-v -lsin 2 9 -二 v -(1 )i 0jr cos 廿5.2、一轮的半径为r ,竖直放置于水平面上作无滑动地滚动,轮心以恒定速度 轮缘上任在直角三角形 QPA 中,「AP =r oA Ctg rr COSTsin 2二-k (_r PA )j =r PAi哼 i 二 v °i ,即,」sinJsin 二r cos-在直角三角形 A 点速度线交于P 点,那么P 点为瞬心。
OCA中,r °A J sinv 0前进。
求一点(该点处的轮辐与水平线成二角)的速度和加速度。
解:任取轮缘上一点M,设其速度为v M,加速度为a MV M = W = wi = v^ - ■「NM-v 2i -,k 2rj = (2,r - v 2)i如图,取轮心O 为原点,建立动系O _xyz ,其中轮心的速度方向为x 轴正向,O_xy 平面位于轮上。
那么轮子的角速度为 .--.k -vk 取O 点为基点,那么v M 二v O 亠心■ r OM 因轮无滑动地滚动,所以 C 点为瞬心。
v O = . r CO = v 0 iyC即:k r CO j = v 0i ,化简有• = ―— = —0,那么有: r co r v M 二 v O , r OM 二 v 0i - k r (cossin rj) =v 0i - k r (cos 引 sin j) r 二 v 0(1 sin r)i - v 0 cosr j _ d _ d a Mv M [v 0(1 sin "i 「v 0cos )j]二 v 0)cosv^ sin v jdt dt =v 0v(cos vi sin )j)二-v ^ (cos )i sin j) 2--乂 (cos 新 sin j) r 5.3、半径为r 的圆柱夹在两块相互平行的平板 向运动,如图示。
理论力学(周衍柏)习题答案,第五章

第五章习题解答5.1解如题5.1.1图杆受理想约束,在满足题意的约束条件下杆的位置可由杆与水平方向夹角所唯一确定。
杆的自由度为1,由平衡条件:即mg y =0①变换方程y=2rcos sin-= rsin2②故③代回①式即因在约束下是任意的,要使上式成立必须有:rcos2-=0④又由于cos=故cos2=代回④式得5.2解如题5.2.1图三球受理想约束,球的位置可以由确定,自由度数为1,故。
得由虚功原理故①因在约束条件下是任意的,要使上式成立,必须故②又由得:③由②③可得5.3解如题5.3.1图,在相距2a的两钉处约束反力垂直于虚位移,为理想约束。
去掉绳代之以力T,且视为主动力后采用虚功原理,一确定便可确定ABCD的位置。
因此自由度数为1。
选为广义坐。
由虚功原理:w①又取变分得代入①式得:化简得②设因在约束条件下任意,欲使上式成立,须有:由此得5.4解自由度,质点位置为。
由①由已知得故②约束方程③联立②③可求得或又由于故或5.5解如题5.5.1图按题意仅重力作用,为保守系。
因为已知,故可认为自由度为1.选广义坐标,在球面坐标系中,质点的动能:由于所以又由于故取Ox为零势,体系势能为:故力学体系的拉氏函数为:5.6解如题5.6.1图.平面运动,一个自由度.选广义坐标为,广义速度因未定体系受力类型,由一般形式的拉格朗日方程①在广义力代入①得:②在极坐标系下:③故将以上各式代入②式得5.7解如题5.7.1图又由于所以①取坐标原点为零势面②拉氏函数③代入保守系拉格朗日方程得代入保守系拉格朗日方程得5.8解:如图5.8.1图.(1)由于细管以匀角速转动,因此=可以认为质点的自由度为1.(2)取广义坐标.(3)根据极坐标系中的动能取初始水平面为零势能面,势能:拉氏函数①(4),代入拉氏方程得:(5)先求齐次方程的解.②特解为故①式的通解为③在时:④⑤联立④⑤得将代回式③可得方程的解为:5.9解如题5.9.1图.(1)按题意为保守力系,质点被约束在圆锥面内运动,故自有度数为2. (2)选广义坐标,.(3)在柱坐标系中:以面为零势能面,则:拉氏函数-①(4)因为不显含,所以为循环坐标,即常数②对另一广义坐标代入保守系拉氏方程③有得④所以此质点的运动微分方程为(为常数)所以5.10解如题5.10.1图.(1)体系自由度数为2.(2)选广义坐标(3)质点的速度劈的速度故体系动能以面为零势面,体系势能:其中为劈势能.拉氏函数①(4)代入拉格郎日方程得:②代入拉格郎日方程得③联立②,③得5.11 解如题5.11.1图(1)本系统内虽有摩擦力,但不做功,故仍是保守系中有约束的平面平行运动,自由度(2)选取广义坐标(3)根据刚体力学其中绕质心转动惯量选为零势面,体系势能:其中C为常数.拉氏函数(4)代入保守系拉氏方程得:对于物体,有5.12解如题5.12.1图.(1)棒作平面运动,一个约束,故自由度. (2)选广义坐标(3)力学体系的动能根据运动合成又故设为绕质心的回转半径,代入①得动能②(4)由③(其中)则④因为、在约束条件下任意且独立,要使上式成立,必须:⑤(5)代入一般形式的拉氏方程得:⑥又代入一般形式的拉氏方程得:⑦⑥、⑦两式为运动微分方程(6)若摆动角很小,则,代入式得:,代入⑥⑦式得:⑧又故代入⑧式得:(因为角很小,故可略去项)5.13解如题5.13.1图(1)由于曲柄长度固定,自由度.(2)选广义坐标,受一力矩,重力忽略,故可利用基本形式拉格朗日方程:①(3)系统动能②(4)由定义式③(5)代入①得:得5.14.解如题5.14.1图.(1)因体系作平面平行运动,一个约束方程:(2)体系自由度,选广义坐标.虽有摩擦,但不做功,为保守体系(3)体系动能:轮平动动能轮质心转动动能轮质心动能轮绕质心转动动能.①以地面为零势面,体系势能则保守系的拉氏函数②(1)因为不显含,得知为循环坐标.故=常数③开始时:则代入得又时,所以5.15解如题5.15.1图(1)本系统作平面平行运动,干限制在球壳内运动,自由度;选广义坐标,体系摩擦力不做功,为保守力系,故可用保守系拉氏方程证明①(2)体系动能=球壳质心动能+球壳转动动能+杆质心动能+杆绕中心转动动能②其中代入②得以地面为零势面,则势能:(其中为常数)(3)因为是循环坐标,故常熟③而代入①式得④联立③、④可得(先由③式两边求导,再与④式联立)⑤⑤试乘并积分得:又由于当5.16解如题图5.16.1.(1)由已知条件可得系统自由度.(2)取广义坐标.(3)根据刚体力学,体系动能:①又将以上各式代入①式得:设原点为零势能点,所以体系势能体系的拉氏函数②(1)因为体系只有重力势能做工,因而为保守系,故可采用③代入③式得即(5)解方程得5.17解如题5.17.1图(1)由题设知系统动能①取轴为势能零点,系统势能拉氏函数②(2)体系只有重力做功,为保守系,故可采用保守系拉氏方程.代入拉氏方程得:又代入上式得即③同理又代入上式得④令代入③④式得:欲使有非零解,则须有解得周期5.18解如题5.18.1图(1)系统自由度(2)取广义坐标广义速度(3)因为是微震动,体系动能:以为势能零点,体系势能拉氏函数(4)即①同理②同理③设代入①②③式得欲使有非零解,必须解之又故可得周期5.19解如题5.19.1图(1)体系自由度(2)取广义坐标广义速度(3)体系动能体系势能体系的拉氏函数(4)体系中只有弹力做功,体系为保守系,可用①将以上各式代入①式得:②先求齐次方程③设代入③式得要使有非零,必须即又故通解为:其中又存在特解有②③式可得式中及为积分常数。
大学物理第五章习题答案

L
o
y
x
22
在锥体上 z 坐标处任取半径为 r高为 dz 的小柱体,则
L z 2 dm dv r dz ( R ) dz L 根据质心定义得
2
z
1 zC M
L
0
1 zdm M
L
L
0
L z 2 z ( R ) dz L
r
dz
L
R ML2 0 L L R 2 L 2 2 3 x [ zL dz 2 Lz dz z dz ] 2 0 0 0 ML R 2 L4 2 L4 L4 R 2 2 3 M L [ ] L L 2 ML 2 3 4 12 M 12 M 4
11
如果一个长度已知的不规则物体的重量超过一个弹簧秤的最大 量度,问怎样用这弹簧秤称出该物体的重量? F 上图,根据合力矩为零得
Gx Fl
N
下图,根据合力矩为零得
F l G(l x )
x
F
l
整理可得:
G F F
G
N
G
课后习题
12
5-3:静止的电动机皮带轮半径为 5 cm,接通电源后做匀变速 转动,30 s 后转速达到152 rad / s,求: 1)30 s 内电动机皮带轮转过的转数; 2)通电后 20 s 时皮带轮的角速度; 3)通电后 20 s 时皮带轮边缘上一点的速度、切向加速度和法 向加速度。 解:皮带轮的角加速度为 152 t 0 t t 5 (rad/s 2 )
8
来复线的作用是增加炮弹的射程和准确性。由于炮弹射出时 绕自身轴线高速转动,空气阻力产生的对质心的力矩使炮弹 围绕前进方向产生进动效应,弹头的轴线始终围绕着弹道切 线向前且做锥形运动,从而能克服空气阻气,保证弹头稳定 地向前飞行,避免大的偏离,提高射程与准确性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
5.1、一长为l 的棒AB ,靠在半径为r 的半圆形柱面上,如图所示。
今A 点以恒定速度0v沿水平线运动。
试求:(i)B 点的速度B v;(ii)画出棒的瞬时转动中心的位置。
解:如图,建立动直角系A xyz -,取A 点为原点。
B A AB v v r ω=+⨯ ,关键是求ω法1(基点法):取A 点为基点,sin C A AC A CO A A v v r v v v v ωθ=+⨯=+=+即sin AC A r v ωθ⨯=,AC r ω⊥ ,化成标量为ω在直角三角形OCA ∆中,AC r rctg θ=所以200sin sin sin cos A AC v v v r rctg r θθθωθθ===即20sin cos v k r θωθ=取A 点为基点,那么B 点的速度为:2002300sin [(cos )sin ]cos sin sin (1)cos B A AB v v v r v i k l i l j r v l l v i jr rθωθθθθθθ=+⨯=+⨯-+=--法2(瞬心法):如图,因棒上C 点靠在半圆上,所以C 点的速度沿切线方向,故延长OC ,使其和垂直于A 点速度线交于P 点,那么P 点为瞬心。
在直角三角形OCA ∆中,sin OA r r θ=在直角三角形OPA ∆中,2cos sin AP OA r r r ctg θθθ==02cos ()sin A PA PA PA r v r k r j r i i v i θωωωωθ=⨯=⨯-===,即20sin cos v r θωθ= 取A 点为基点,那么B 点的速度为:2002300sin [(cos )sin ]cos sin sin (1)cos B A AB v v v r v i k l i l j r v l l v i jr rθωθθθθθθ=+⨯=+⨯-+=--5.2、一轮的半径为r ,竖直放置于水平面上作无滑动地滚动,轮心以恒定速度0v前进。
求轮缘上任一点(该点处的轮辐与水平线成θ角)的速度和加速度。
解:任取轮缘上一点M ,设其速度为M v ,加速度为M a如图,取轮心O 为原点,建立动系O xyz -,其中轮心的速度方向为x 轴正向,O xy -平面位于轮上。
那么轮子的角速度为k k ωωθ=-=取O 点为基点,那么M O OM v v r ω=+⨯因轮无滑动地滚动,所以C 点为瞬心。
0O CO v r v ω=⨯=即0CO k r j v i ω-⨯= ,化简有00CO v vr r ω==,那么有:0000(cos sin )(cos sin )(1sin )cos M O OM v v r v i k r i j v v i k r i j rv i v jωωθθθθθθ=+⨯=-⨯+=-⨯+=+-00000020[(1sin )cos ]cos sin (cos sin )(cos sin )(cos sin )M M d d a v v i v j v i v jdt dtv i j v i j v i j rθθθθθθθθθωθθθθ==+-=+=+=-+=-+ 5.3、半径为r 的圆柱夹在两块相互平行的平板A 和B 之间,两板分别以速度1v 和2v匀速反向运动,如图示。
若圆柱和两板间无相对滑动,求:(i)圆柱瞬心的位置(ii)位于圆柱上与板的接触点M 的加速度。
解:(i)如图,圆柱瞬心的位置为C 点,不妨设12v v >在图示的直角坐标系中,k ωω=- ,11v v i = ,22v v i =- ,CM CM r r j = ,(2)CN CN CM r r j r r j =-=-因为1M CM v v r ω==⨯ ,2N CN v v r ω==⨯所以有1CM v r ω=,2(2)CN CM v r r r ωω==-,联立解得:1122CM rv r v v =+或者取N 点为基点,那么:11222(2)M N NM v v v i v r v i k rj r v i ωωω===+⨯=--⨯=-1v 2v AB求得122v v r ω+=,因1CM v r ω=,故1122CM rv r v v =+ 于是求得瞬心的位置位于距离M 点1122CM rv r v v =+的直径上。
(ii) 瞬心到圆柱轴心O 的距离为1212CO CM v v r r r r v v -=-=+圆柱轴心O 的速度为1212121222O CO CO v v v v v v v r r i ri i r v v ωω+--=⨯===+M 点相对O 点的速度为:1212122MO M O v v v v v v v v i i i -+=-=-=M 点相对O 点做圆周运动,故2212()4MO M v v v a j r r+==-5.4、高为h 、顶角为2α的圆锥,在一平面上无滑动地滚动。
已知圆锥轴线以恒定角速度Ω绕过顶点的铅直轴转动。
求: (i)圆锥的角速度(ii)锥体底面上最高点的速度 (iii)圆锥的角加速度解:取圆锥的顶点为原点,建立动系O xyz - 取圆锥和平面交线为y 轴, 圆锥的对称面OAB 位于O yz -平面因圆锥轴线以恒定角速度Ω绕过顶点的铅直轴转动,若设圆锥绕自身轴线的角速度为'ω那么圆锥绕顶点的角速度为'ωω=+Ω又OB 母线与平面接触,为圆锥的瞬时转动轴,故ω平行于OB(i)在角速度合成的矢量三角形中,圆锥的角速率ctg ωα=Ω,即ctg j ωα=-Ω(ii)在动系O xyz -中,锥体底面上最高点A 的位矢可以表示为:cos2sin 2OA OA OA r r j r k αα=+由图中的几何关系可知:cos OA hr α= 所以(cos 2sin 2)cos OA h r j k ααα=+cos A OA α(iii)因圆锥的角速度为ctg j ωα=-Ω,所以圆锥的角加速度为: 2()d d djctg j ctg ctg j ctg i dt dt dt ωααααα==-Ω=-Ω=-ΩΩ⨯=Ω5.5、在一半径为R 的球体上置一半径为r 的较小的球,它们的连心线'OO 与竖直轴间保持α角,如图示。
若'OO 绕竖直轴以恒定的角速度ω转动,小球在大球上无滑动地滚动。
分别求出小球最高点A 和最低点B 的速度。
解:建立如图所示的动直角坐标系O xyz -使'OO r位于O yz -平面内。
则有: k ωω=,''cos 'sin j k ωωαωα=+'()sin ()cos OO r r R j r R k αα=-+++'O A r rk =,'O B r rk =-在大球和小球的角速度矢量直角三角形中,有'ω=所以2'sin cos sin j k ωωααωα=+''[()sin ()cos ][()sin ]()sin O OO v r k r R j r R k k r R j r R iωωααωαωα=⨯=⨯-+++=⨯-+=+2'''()sin (sin cos sin )sin [(1cos )]A O O A v v r r R i j k rkr R iωωαωααωαωαα=+⨯=+++⨯=++2'''()sin (sin cos sin )()sin [(1cos )]B O O B v v r r R i j k rk r R ωωαωααωαωαα=+⨯=+++⨯-=-+5.6、一边长为d 、质量为m 的匀质立方体,分别求出该立方体对过顶点的棱边、面对角线和体对角线的转动惯量P J 、f J 和b J解:如图,要求图示棱边的转动惯量P J ,先求立文体过质心O 且平行于棱的z 轴的转动惯量z J在图示的直角坐标系O xyz -中,,,x y z 轴皆为惯量主轴故52/2/2/22222/2/2/2()()66d d d z d d d d md J x y dm x y dxdydz ρρ---=+=+==⎰⎰⎰⎰由平行轴定理:22222()2623P z md md md J J m =+=+=要求图示面对角线的转动惯量f J ,先求立文体过质心O 点,且平行于面对角线的轴的转动惯量z J,此轴与坐标轴的方向余弦分别为,坐标轴为惯量主轴,所以有: 222006000000600006x O y z md J md J J J md ⎛⎫ ⎪ ⎪⎛⎫ ⎪ ⎪== ⎪ ⎪ ⎪ ⎪⎝⎭ ⎪ ⎪⎝⎭由平行轴定理有:2222222006500()6264120006f md md d md md md J m md ⎛⎫ ⎪ ⎪ ⎪=+=+= ⎪⎪ ⎪⎪ ⎪ ⎪⎝⎭⎝⎭体对角线与坐标轴的方向余弦分别为,坐标轴为惯量主轴,那么体对角线的转动惯量为:2222006066006b md md md J md ⎛⎫ ⎪ ⎪ ⎪== ⎪⎪ ⎪ ⎪⎝⎭ 5.7、一匀质等边三角形的薄板,边长为l 、质量为m 。
试在图示坐标系下,求出薄板对质心C 的惯量矩阵C J ,并由此导出对顶点O 的惯量矩阵O JO ξηζ-的坐标轴分别相互平行,ξη和xy 都在薄板平面内。
解:由图中坐标系C xyz -的取法可知,,y zx 轴是是三角板的对称面的法线,故,,x y z 都是惯量主轴。
三角板的密度为:σ=先求三角板对x 轴的转动惯量。
因三角板关于y 轴对称,所以三角板对x 轴的转动惯量x J是y 轴一侧直角板的2倍,如图,取距离C 点为x ,厚为dx 的线性微元,由图中几何关系知,线性微元的高为())232l l h x tgx π=-=-,22(2)mdm dS hdx l x dx lσσ===- 线性微元对过质心且垂直于线性微元的轴的转动惯量为21()12dm h ,由平行轴定理知线性微元对x轴的转动惯量:222211()()(()()122312x h l dJ dm h dm dm h =+=+222223222()()(2)()212212444()36x l l m l l dJ dm x x l x x x dxl m m m ml x x x dxl l =-+=--+=-+-+2/2322044422()3624l x x m m m ml ml J dJ x x x dx l l ==-+-+=⎰⎰再求三角板对y 轴的转动惯量如图,取距离C 点为y ,厚为dy的线性微元,由图中几何关系知,线性微元的长为2)63l a y tg π==,228()33l mdm ady dy y dy lσ===- 线性微元对过质心且垂直于线性微元的轴的转动惯量为21()12dm a 故线性微元对y 轴的转动惯量:2222321128()()121233244]399y l m dJ dm a y dy lm y y y dy l===+--2322/24439924l y y l m ml J dJ y y y dy l -==-+-=⎰⎰ 最后求z 轴的转动惯量:如图,对于线元过中心且平行于z 轴的转动惯量为21()12dm a由平行轴定理知线元对z 轴的转动惯量为:221()()12z dJ dm a dm y =+22222232/22218)1224243242412l z z l ml ml m J dJ a dm y dm y dm y y dyl ml ml ml-==+=+=+-=+=⎰⎰⎰⎰⎰所以三角板对板对质心C 的惯量矩阵222200241000001024240020012C ml ml ml J ml ⎛⎫ ⎪ ⎪⎛⎫⎪ ⎪== ⎪ ⎪ ⎪ ⎪⎝⎭ ⎪ ⎪⎝⎭由平行轴定理易知:222224128x ml ml mlJ J m ξ=+=+=22227()224424y l ml ml mlJ J m η=+=+=2222512312z ml ml ml J J m ζ=+=+=因三角板中0ζ=,所以0000O J J J J J J ξξηξηηζ⎛⎫- ⎪=- ⎪ ⎪⎝⎭因三角板的两腰在坐标系O ξηζ-中方程为:η=和η=即ξ=和l ξ=202002()423l J d d l d m d d l ξηξξηηηηηηηη==-=-=所以23070240010O ml J ⎛⎫-⎪=- ⎪ ⎪ ⎪⎝⎭5.8、质量为m ,长为l的夹角θ保持恒定。