ds18b20的完整程序
DS18B20温度检测程序
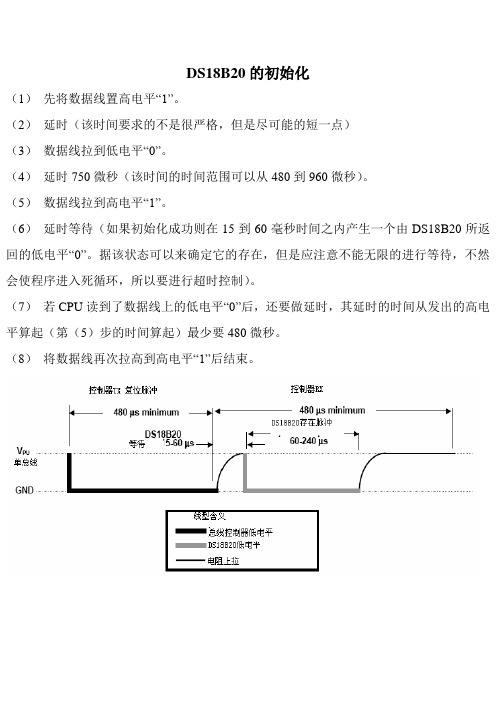
(1)先将数据线置高电平“1”。
(2)延时(该时间要求的不是很严格,但是尽可能的短一点)(3)数据线拉到低电平“0”。
(4)延时750微秒(该时间的时间范围可以从480到960微秒)。
(5)数据线拉到高电平“1”。
(6)延时等待(如果初始化成功则在15到60毫秒时间之内产生一个由DS18B20所返回的低电平“0”。
据该状态可以来确定它的存在,但是应注意不能无限的进行等待,不然会使程序进入死循环,所以要进行超时控制)。
(7)若CPU读到了数据线上的低电平“0”后,还要做延时,其延时的时间从发出的高电平算起(第(5)步的时间算起)最少要480微秒。
(8)将数据线再次拉高到高电平“1”后结束。
(1)数据线先置低电平“0”。
(2)延时确定的时间为15微秒。
(3)按从低位到高位的顺序发送字节(一次只发送一位)。
(4)延时时间为45微秒。
(5)将数据线拉到高电平。
(6)重复上(1)到(6)的操作直到所有的字节全部发送完为止。
(7)最后将数据线拉高。
DS18B20的写操作时序图如图DS18B20的读操作(1)将数据线拉高“1”。
(2)延时2微秒。
(3)将数据线拉低“0”。
(4)延时15微秒。
(5)将数据线拉高“1”。
(6)延时15微秒。
(7)读数据线的状态得到1个状态位,并进行数据处理。
(8)延时30微秒。
DS18B20的读操作时序图如图所示。
DS18B20的Protues仿真图源程序代码:#include "reg51.h"#include "intrins.h" // 此头文件中有空操作语句NOP 几个微秒的延时可以用NOP 语句,但本人没用NOP,直接用了I++来延时#define uchar unsigned char#define uint unsigned intuchar code table[]={0x30,0x31,0x32,0x33,0x34,0x35,0x36,0x37,0x38,0x39};sbit ds18b20_io=P2^0; //单片机与DS18B20的连接口sbit lcdrs=P2^6; //1602与单片机的接口sbit lcden=P2^7;unsigned char flag,tflag,i;unsigned int temper0,temper1,tvalue;float temperature;void delay() //6us 在KEIL中仿真出来的时间,这是调用DELAY所用的时间{i++;i++;}void Delay_50us(unsigned char t) //50us延时程序{unsigned char j;for(;t>0;t--)for(j=20;j>0;j--);}void delay1(uint z) //这个延时主要用在1602中,1602的读写时序没有//DS18B20那么严格{uint x,y;for(x=0;x<z;x++){ for(y=0;y<121;y++){;};};}uchar ds18b20_rst(){unsigned char j;ds18b20_io=1;i++; //1usds18b20_io=0;for(j=0;j<60;j++) //543us{delay();}ds18b20_io=1;for( j=0;j<7;j++) //65us{delay();}if(!ds18b20_io) //如果读到低电平,即复位成功{flag=1;}else flag=0; //如果没有读到低电平,则复位失败Delay_50us(9); //450usds18b20_io=1;return flag;}void ds18b20_writebyte(unsigned char byte){unsigned char j;for(j=0;j<8;j++){ds18b20_io=1;i++;ds18b20_io=0;delay(); //15usdelay();i++;i++;i++;ds18b20_io=byte&0x01;delay(); delay();delay();delay(); //48usdelay(); delay();delay();byte>>=1;ds18b20_io=1;delay();}ds18b20_io=1;}unsigned char ds18b20_readbyte() {unsigned char k,jj,i;jj=0;for(k=0;k<8;k++){ds18b20_io=1;i++; i++;ds18b20_io=0;delay(); //15usdelay(); i++;i++;i++;ds18b20_io=1;delay(); //15usdelay(); i++; i++;i++;if(ds18b20_io) //17us jj=(jj>>1)|0x80;elsejj>>=1;delay();delay(); delay(); //18us }return jj;}void write_com(uchar com){lcdrs=0;P1=com;delay1(5);lcden=1;delay1(5);lcden=0;}void write_data(uchar date){lcdrs=1;P1=date;delay1(5);lcden=1;delay1(5);lcden=0;}void init(){lcden=0;write_com(0x38);write_com(0x0C);write_com(0x06);write_com(0x01);}float read_temp()/*读取温度值并转换*/{if(ds18b20_rst()==1);{ds18b20_writebyte(0xcc);//*跳过读序列号*/ ds18b20_writebyte(0x44);//*启动温度转换*/ Delay_50us(30);}if(ds18b20_rst()==1);{ds18b20_writebyte(0xcc);//*跳过读序列号*/ds18b20_writebyte(0xbe);//*读取温度*/temper0 =ds18b20_readbyte();temper1 =ds18b20_readbyte();Delay_50us(20);}if(temper1&0xf8) //判断是正温度还是负温度{ //如果是高5位是0 为正温度,反则为负温度tflag=1;tvalue=(temper1<<8)|temper0;tvalue=((~tvalue)+1);temperature=tvalue*(0.0625);}else{tflag=0;tvalue=(temper1<<8)|temper0;temperature=tvalue*0.0625; //不用把tvalue进行转换,直接乘0.0625//的精度}return(temperature);}void write_xian(float date){uint bai,shi,ge,xiaozheng,xqian,xbai,xshi,xge;float k,m; //把浮点的DATA转换为整数,得到浮点娄的整数部分bai=(int)(date)/100; //把得到的整数部分拆开分别存在BAI SHI GE 中shi=((int)(date)%100)/10;ge=(int)(date)%10;if (bai!=0) //如果百不为0 则把整数部分全部显示{write_data(0x30+bai);write_data(0x30+shi);write_data(0x30+ge);}else if (shi!=0) //如果十不为0 则把十位和个位显示{write_data(0x30+shi);write_data(0x30+ge);}else write_data(0x30+ge);//如果百和十位都为0 ,则只显示个位数write_data(0x2e);k=date-(int)date; //取浮点娄的小数部分m=k*10000; //把得到的小数变为整数并显示xiaozheng=(int)m;xqian=(xiaozheng)/1000;xbai=((xiaozheng)%1000)/100;xshi=((xiaozheng)%100)/10;xge=(xiaozheng)%10;write_data(0x30+xqian);write_data(0x30+xbai);write_data(0x30+xshi);write_data(0x30+xge);}void main(){temperature=0.0;flag=0;tflag=0;tvalue=0;init();while(1){read_temp();if(tflag==0){write_xian(temperature); write_data(' '); write_data(' '); }if(tflag==1){write_data('-');write_xian(temperature); write_data(' '); write_data(' '); }write_com(0x80);}}。
DS18B20温度传感器完整C程序

//
ucharcode
dis_7[12]={0xfc,0x60,0xda,0xf2,0x66,0xb6,0xbe,0xe0,0xfe,0xf6,0xff,0x02};
//共阳LED段码表0123456789不亮-
ucharcodescan_con[4]={0xf7,0xfB,0xfD,0xff};//列扫描控制字
{
DQ=1;_nop_();_nop_();//从高拉倒低
DQ=0;
delay(50);//550us
DQ=1;
delay(6);//66us
presence=DQ;//presence=0复位成功,继续下一步
}
delay(45);//延时500us
presence=~DQ;
}
DQ=1;//拉高电平
display[1]=display[4]%100;//取后两位数据暂存
display[2]=display[1]/10;//取十位数据暂存
if(DQ)value|=0x80;
delay(6);//66us
}
DQ=1;
return(value);
}
//
/****************读出温度函数************************/
//
read_temp()
{
ow_reset();//总线复位
delay(200);
write_byte(0xcc);//发命令
write_byte(0x44);//发转换命令
ow_reset();
delay(1);
write_byte(0xcc);//发命令
write_byte(0xbe);
ds18b20温度计程序
ORG 0000HAJMP MAINORG 0030HMAIN: MOV R5,#0FFHMAIN1:MOV P0,#00H ;系统自检。
自高位向低位带小数点显示8扫描256次CLR P2.4LCALL DELAYSETB P2.4CLR P2.5LCALL DELAYSETB P2.5CLR P2.6LCALL DELAYSETB P2.6CLR P2.7LCALL DELAYSETB P2.7DJNZ R5,MAIN1SETB P2.4 ;关显示SETB P2.5SETB P2.6SETB P2.7SJMP MAIN2DELAY:MOV R7 ,#05H //;延时LP8: MOV R6,#19HLP7:DJNZ R6,LP7DJNZ R7,LP8RET; DS18B20初始化汇编程序;*****************************************//MAIN2:LCALL DISP //;主程序SETB P3.2 // ;18B20DQ置1拉高LCALL INIT // ;调初始化MOV A,#0CCH //;跳过ROM匹配------0CCLCALL WRITE // ;调写DS18B20的程序MOV A,#44H // ;发出温度转换命令LCALL WRITE // ;调写DS18B20的程序MOV R6,#34H //;延时136微秒转换时间,写一个字约需70微秒。
DJNZ R6,$LCALL DISPLCALL INITMOV A,#0CCHLCALL WRITEMOV A,#0BEH // ;发出读温度命令LCALL WRITELCALL READCLR CLCALL CONVTEMPLCALL DISPBCDLCALL DISPSJMP MAIN2WRITE:MOV R0,#8 // ;写子程序CLR CWR1: CLR P3.2MOV 20H,#3 // ;延时17微秒DJNZ 20H,$RRC AMOV P3.2,CMOV 21H,#10 // ;发送后延时45微秒DJNZ 21H,$SETB P3.2NOPDJNZ R0,WR1 // ;8位未发送完转SETB P3.2RETREAD: MOV R6,#2 // ;读子程序CLR PSW.5 // ;清清标志F0RE0:MOV R2,#8RE1:CLR CSETB P3.2 // ;拉高DQNOP // ;延时2微秒CLR P3.2 // ;拉低DQSETB P3.2MOV 22H,#3RE2:DJNZ 22H,RE2MOV C,P3.2MOV 23H,#10RE3:DJNZ 23H,RE3RRC ADJNZ R2,RE1 //;8位未读完继续读CPL PSW.5JNB PSW.5,RE4 // ;高8位保存至28HMOV 29H,A // ;低8位及小数保存至29HRE4:MOV 28H,ADJNZ R6,RE0 //;高8位未读继续RETINIT:SETB P3.2 // ;初始化开始DQ置1(整个时隙和理论值不是很准确)NOP //;延时L0:CLR P3.2 // ;DQ拉低MOV 24H,#100 // ;延时400微秒DJNZ 24H,$SETB P3.2 // ;DQ拉高MOV 25H,#10 // ;置40微秒延时常数L01:JNB P3.2,L2 // ;有18B20响应转L2DJNZ 25H,L01 // ;无18B20响应等待40微秒SJMP L0 // ;无18B20重新初始化L2:MOV R7,#60 // ,延时240微秒L3:DJNZ R7,L3SETB P3.2 //;DQ拉高、退出RETCONVTEMP:MOV A,28H //;温度转换ANL A,#80H //;温度正负判别JZ TEMPC1 //;温度为正转CLR C // ;温度为负调整MOV A,29HCPL AADD A,#01HMOV 29H,AMOV A,28HCPL AADDC A,#00HMOV 28H,AMOV 26H,#0BH // ;温度为负26H内送#0BHSJMP TEMPC11TEMPC1:MOV 26H,#0AH //;温度为正26H内送#0AHTEMPC11:MOV A,26HSWAP AMOV 26H,A // ;26H高4位为温度符号MOV A,29H // ;取温度小数部分ANL A,#0FH ;去整数个位MOV DPTR,#DOTTABMOVC A,@A+DPTRMOV 27H,A // ;查表得小数值,并保存至27H单元MOV A,29H // ;温度整数部分拼装后暂时存入AANL A,#0F0H // ;留下整数个位SWAP AMOV 29H,AMOV A,28HANL A,#0FHSWAP AHEX2BCD1:MOV B,#64H // ;温度整数部分除100得整数百位,并存入R7中DIV ABMOV R7,A // ;R7中为百位,B中为十位和个位MOV A,#0AH // ;温度整数部分除10得整数十位和个位XCH A,B // ;除数与被除数交换DIV ABSWAP AORL A,BTEMPC10:MOV 29H,A // ;温度十位和个位存入29H单元中,十位在高4位,个位在低4位ANL A,#0F0H // ;取温度十位SWAP AORL A,26H //;十位加温度符号存入26H单元;高4位为符号MOV 26H,AMOV A,29HANL A,#0FH // ;取温度个位SWAP AORL A,27HMOV 27H,A // ;27H单元中高4位为个位,低4位为小数MOV A,R7JZ TEMPC12 // ;百位为0退出ANL A,#0FH // ;百位不为0即温度为正和十位重新拼装后存入26H,高4位为百位SWAP A // ;MOV R7,AMOV A,26HANL A,#0FH ; // ;去除26H单元的符号ORL A,R7 //;百位和十位拼装,放入26H单元高4位为百位MOV 26H,A // ;低4位为十位TEMPC12:RETDOTTAB:DB 00H,01H,01H,02H,03HDB 03H,04H,04H,05H,06HDB 06H,07H,08H,08H,09H,09HDISPBCD:MOV A,27H // ;BCD码转换ANL A,#0FHMOV 70H,A // ;取小数,并保存在70H中SWAP AANL A,#0FHMOV 71H,A // ;取整数个位,并保存在71H中MOV A,26HANL A,#0FHMOV 72H,A //;取整数十位,并保存在72H中MOV A,26HSWAP AANL A,#0FHMOV 73H,A // ;取整数百位,并保存在73H中MOV A,72H //;取整数十位ANL A,#0F0HCJNE A,#00H,DISPBCD2SJMP DISPBCD2DISPBCD0:MOV A,26H // ;取整数百位ANL A,#0F0HCJNE A,#00H,DISPBCD2 //;百位不等于0退出MOV A,26HSW AP AANL A,#0FH //;十位保留符号MOV 73H,#0AHMOV 72H,ADISPBCD2:RETDISP:MOV R1,#70H // ;显示子程序MOV R5,#11101111B // ;送Y4位码PLAY:MOV P0,#0FFH // ;关段码MOV A,R5 // ;取Yn位码MOV P2,A // ;送位码MOV A,@R1 //;取段码MOV DPTR,#TABMOVC A,@A+DPTRMOV P0,A // ;送段码MOV A,R5JB ACC.5,LOOP1 // ;位码未指向Y2(整数个位)转CLR P0.7 ;;开小数点LOOP1:LCALL DL1MS //;调显示延时INC R1 // ;指向下一位显示段码MOV A,R5 ;取显示位码JNB ACC.7,ENDOUTRL A // ;向下一位位码MOV R5,AAJMP PLAYENDOUT:MOV P0,#0FFHMOV P3,#0FFHRETTAB: DB 0C0H,0F9H,0A4H,0B0HDB 99H,92H,82H,0F8HDB 80H,90H,0FFH,0BFHDL1MS:MOV R6,#14H // ;延时1mS DL1: MOV R7,#19HDL2: DJNZ R7,DL2DJNZ R6,DL1RETEND。
DS18B20完整测试程序
#include<reg52.h>//52单片机头文件,规定了52单片机的寄存器和IO口等#include<intrins.h>//_nop_空指令及左右循环移位子函数库#include "DS18B20.h"#include "lcd1602.h"#include "ds1302.h"unsigned char code digit[10]={"0123456789"}; //定义字符数组显示数字/************************************************************************以下是DS18B20的操作程序************************************************************************/sbit DQ=P3^5;unsigned char time; //设置全局变量,专门用于严格延时/*****************************************************函数功能:将DS18B20传感器初始化,读取应答信号出口参数:flag***************************************************/bit Init_DS18B20(void){bit flag; //储存DS18B20是否存在的标志,flag=0,表示存在;flag=1,表示不存在DQ = 1; //先将数据线拉高for(time=0;time<2;time++) //略微延时约6微秒;DQ = 0; //再将数据线从高拉低,要求保持480~960usfor(time=0;time<200;time++) //略微延时约600微秒; //以向DS18B20发出一持续480~960us的低电平复位脉冲DQ = 1; //释放数据线(将数据线拉高)for(time=0;time<10;time++); //延时约30us(释放总线后需等待15~60us让DS18B20输出存在脉冲)flag=DQ; //让单片机检测是否输出了存在脉冲(DQ=0表示存在)for(time=0;time<200;time++) //延时足够长时间,等待存在脉冲输出完毕;return (flag); //返回检测成功标志}/*****************************************************函数功能:从DS18B20读取一个字节数据出口参数:dat***************************************************/unsigned char ReadOneChar(void){unsigned char i=0;unsigned char dat; //储存读出的一个字节数据for (i=0;i<8;i++){DQ =1; // 先将数据线拉高_nop_(); //等待一个机器周期DQ = 0; //单片机从DS18B20读书据时,将数据线从高拉低即启动读时序dat>>=1;_nop_(); //等待一个机器周期DQ = 1; //将数据线"人为"拉高,为单片机检测DS18B20的输出电平作准备for(time=0;time<2;time++); //延时约6us,使主机在15us内采样if(DQ==1)dat|=0x80; //如果读到的数据是1,则将1存入datelsedat|=0x00;//如果读到的数据是0,则将0存入dat//将单片机检测到的电平信号DQ存入r[i]for(time=0;time<8;time++); //延时3us,两个读时序之间必须有大于1us的恢复期}return(dat); //返回读出的十进制数据}/*****************************************************函数功能:向DS18B20写入一个字节数据入口参数:dat***************************************************/WriteOneChar(unsigned char dat){unsigned char i=0;for (i=0; i<8; i++){DQ =1; // 先将数据线拉高_nop_(); //等待一个机器周期DQ=0; //将数据线从高拉低时即启动写时序DQ=dat&0x01; //利用与运算取出要写的某位二进制数据,//并将其送到数据线上等待DS18B20采样for(time=0;time<10;time++);//延时约30us,DS18B20在拉低后的约15~60us期间从数据线上采样DQ=1; //释放数据线for(time=0;time<1;time++);//延时3us,两个写时序间至少需要1us的恢复期dat>>=1; //将dat中的各二进制位数据右移1位}for(time=0;time<4;time++); //稍作延时,给硬件一点反应时间}/****************************************************************************** 以下是与温度有关的显示设置******************************************************************************//*****************************************************函数功能:显示温度符号***************************************************//*void display_symbol(void){unsigned char i;write_com(0x80); //写显示地址,将在第1行第1列开始显示i = 0; //从第一个字符开始显示while(Temp[i] != '\0') //只要没有写到结束标志,就继续写{write_data(Temp[i]); //将字符常量写入LCDi++; //指向下一个字符delay1ms(); //延时1ms给硬件一点反应时间}}*//*****************************************************函数功能:显示温度的小数点***************************************************/void display_dot(void){write_com(0x80+14); //写显示地址,将在第1行第9列开始显示write_data('.'); //将小数点的字符常量写入LCDdelay1ms(); //延时1ms给硬件一点反应时间}/*****************************************************函数功能:显示温度的单位(C)***************************************************//***void display_cent(void){unsigned char i;write_com(0x80+10); //写显示地址,将在第1行第10列开始显示i = 0; //从第一个字符开始显示while(Cent[i] != '\0') //只要没有写到结束标志,就继续写{write_data(Cent[i]); //将字符常量写入LCDi++; //指向下一个字符delay1ms(); //延时1ms给硬件一点反应时间}} *//*****************************************************函数功能:显示温度的整数部分入口参数:x***************************************************/void display_temp1(unsigned char x){unsigned char k,l; //j,k,l分别储存温度的百位、十位和个位/*j=x/100; //取百位*/k=(x%100)/10; //取十位l=x%10; //取个位*/write_com(0x80+12); //写显示地址,将在第1行第6列开始显示/* write_data(digit[j]); //将百位数字的字符常量写入LCD */ write_data(digit[k]); //将十位数字的字符常量写入LCDwrite_data(digit[l]); //将个位数字的字符常量写入LCD */}/*****************************************************函数功能:显示温度的小数数部分入口参数:x***************************************************/void display_temp2(unsigned char x){write_com(0x80+15); //写显示地址,将在第2行第11列开始显示write_data(digit[x]); //将小数部分的第一位数字字符常量写入LCDdelay1ms(); //延时1ms给硬件一点反应时间}/*****************************************************函数功能:做好读温度的准备***************************************************/void ReadyReadTemp(void){Init_DS18B20(); //将DS18B20初始化WriteOneChar(0xCC); // 跳过读序号列号的操作WriteOneChar(0x44); // 启动温度转换for(time=0;time<100;time++); //温度转换需要一点时间Init_DS18B20(); //将DS18B20初始化WriteOneChar(0xCC); //跳过读序号列号的操作WriteOneChar(0xBE); //读取温度寄存器,前两个分别是温度的低位和高位}。
DS18B20汇编程序(完整版)

DS18B20汇编程序;实验目的:熟悉DS18B20的使用;六位数码管显示温度结果,其中整数部分2位,小数部分4位;每次按下RB0键后进行一次温度转换。
;硬件要求:把DS18B20插在18B20插座上; 拨码开关S10第1位置ON,其他位置OFF; 拨码开关S5、S6全部置ON,其他拨码开关全部置OFF;*****************以下是暂存器的定义*****************************#INCLUDE<P16F877A.INC>#DEFINE DQ PORTA,0 ;18B20数据口__CONFIG_DEBUG_OFF&_CP_ALL&_WRT_HALF&_CPD_ON&_LVP_OFF&_BODEN_OFF&_PWRTE_ON&_WDT_OFF&_HS _OSCCBLOCK 20HDQ_DELAY1DQ_DELAY2TEMPTEMP1TEMP2 ;存放采样到的温度值TEMP3COUNTCOUNT1ENDCTMR0_VALUE EQU 0AH ;寄存器初值为6,预分频比1:4,中断一次时间为4*(256-6)=1000usDQ_DELAY_VALUE1 EQU 0FAHDQ_DELAY_VALUE2 EQU 4H;**********************以下是程序的开始************************ ORG 00HNOPGOTO MAIN ;入口地址ORG 04HRETFIE ;在中断入口出放置一条中断返回指令,防止干扰产生中断TABLEADDWF PCL,1RETLW 0C0H ;0的编码(公阳极数码管)RETLW 0F9H ;1的编码RETLW 0A4H ;2的编码RETLW 0B0H ;3的编码RETLW 99H ;4的编码RETLW 92H ;5的编码RETLW 082H ;6RETLW 0F8H ;7RETLW 080H ;8RETLW 090H ;9;***************************主程序******************************* MAINCLRF PORTACLRF PORTBBANKSEL TRISACLRF TRISA ;A口所有先设置为输出CLRF TRISDMOVLW 01HMOVWF TRISB ;B0口为输入,其他为输出MOVLW 06HMOVWF ADCON1 ;关闭所有A/D口MOVLW 01HMOVWF OPTION_REG ;分频比1:4,定时器,内部时钟源BCF STATUS,RP0CLRF TEMPCLRF TEMP1CLRF TEMP2 ;清零临时寄存器MOVLW 8HMOVWF COUNTMOVLW 38HMOVWF FSRCLRF INDFINCF FSR,1DECFSZ COUNT,1GOTO $-3;****************************循环处理部分************************;先启动18B20温度转换程序,在判断温度转换是否完成(需750us);未完成则调用显示子程序,直到完成温度转换;完成后读取温度值;送LCD显示LOOPBTFSC PORTB,0 ;判断温度转换按键是否按下GOTO LOOP1 ;否,转显示CALL DELAY ;消抖BTFSC PORTB,0 ;再次判断GOTO LOOP1CALL RESET_18B20 ;调用复位18B20子程序MOVLW 0CCHMOVWF TEMPCALL WRITE_18B20 ;SKIP ROM命令MOVLW 44HMOVWF TEMPCALL WRITE_18B20 ;温度转换命令CLRF STATUSCALL DELAY_750MS ;调用温度转换所需要的750MS延时NOPCALL RESET_18B20MOVLW 0CCHMOVWF TEMPCALL WRITE_18B20 ;SKIP ROM命令MOVLW 0BEHMOVWF TEMPCALL WRITE_18B20 ;读温度命令CALL READ_18B20 ;调用读温度低字节MOVFW TEMPMOVWF TEMP1 ;保存到TEMP1CALL READ_18B20 ;调用读温度高字节MOVFW TEMPMOVWF TEMP2 ;保存到TMEP2CALL RESET_18B20LOOP1CALL TEMP_CHANGE ;调用温度转换程序CALL DISPLAY ;调用LCD显示程序GOTO LOOP ;循环工作;*********************复位DS18B20子程序************************** RESET_18B20;根据DATASHEET介绍,写数据时应遵照如下规定:;主控制器把总线拉低至少480us,;18B20等待15-60us后,把总线拉低做为返回给控制器的应答信号BANKSEL TRISABCF TRISA,0BCF STATUS,RP0BCF DQMOVLW 0A0HMOVWF COUNT ;160USDECFSZ COUNT,1GOTO $-1 ;拉低480usBSF DQ ;释放总线MOVLW 14HMOVWF COUNTDECFSZ COUNT,1GOTO $-1 ;等待60usBANKSEL TRISABSF TRISA,0 ;DQ设置为输入BCF STATUS,RP0BTFSC DQ ;数据线是否为低GOTO RESET_18B20 ;否则继续复位MOVLW 4HMOVWF COUNTDECFSZ COUNT,1 ;延时一段时间后再次判断GOTO $-1BTFSC DQGOTO RESET_18B20MOVLW 4BHMOVWF COUNTDECFSZ COUNT,1GOTO $-1BANKSEL TRISABCF TRISA,0 ;DQ设置为输出BCF STATUS,RP0RETURN;*********************写DS18B20子程序**************************** WRITE_18B20;根据DATASHEET介绍,写数据时应遵照如下规定:;写数据0时,主控制器把总线拉低至少60us;写数据1时,主控制器把总线拉低,但必须在15us内释放MOVLW 8HMOVWF COUNT ;8位数据BANKSEL TRISABCF TRISA,0BCF STATUS,RP0BCF STATUS,CWRITE_18B20_1BSF DQ ;先保持DQ为高MOVLW 5HMOVWF COUNT1BCF DQ ;拉低DQ15usDECFSZ COUNT1,1GOTO $-1RRF TEMP,1BTFSS STATUS,C ;判断写的数据为0还是1GOTO WRITE_0BSF DQ ;为1,立即拉高数据线GOTO WRITE_ENDWRITE_0BCF DQ ;继续保持数据线为低WRITE_ENDMOVLW 0FHMOVWF COUNT1 ;保持45msDECFSZ COUNT1,1GOTO $-1BSF DQ ;释放总线DECFSZ COUNT,1 ;是否写完8位数据GOTO WRITE_18B20_1RETURN;**********************读DS18B20子程序**************************** READ_18B20;根据DATASHEET介绍,读数据时应遵照如下规定:;读数据0时,主控制器把总线拉低后,18B20再把总线拉低60us;读数据1时,主控制器把总线拉低后,保持总线状态不变;主控制器在数据线拉低后15us内读区数据线上的状态。
ds18b20的C语言完整程序(c51)
ds18b20的C语言完整程序(c51)(可组网数字式温度传感器)发布日期:[2005-05-10]作者:(sparkstar)//DS1820 C51 子程序//这里以11.0592M晶体为例,不同的晶体速度可能需要调整延时的时间//sbit DQ =P2^1;//根据实际情况定义端口typedef unsigned char byte;typedef unsigned int word;//延时void delay(word useconds){for(;useconds>0;useconds--);}//复位byte ow_reset(void){byte presence;DQ = 0; //pull DQ line lowdelay(29); // leave it low for 480usDQ = 1; // allow line to return highdelay(3); // wait for presencepresence = DQ; // get presence signaldelay(25); // wait for end of timeslotreturn(presence); // presence signal returned} // 0=presence, 1 = no part//从 1-wire 总线上读取一个字节byte read_byte(void){byte i;byte value = 0;for (i=8;i>0;i--){value>>=1;DQ = 0; // pull DQ low to start timeslotDQ = 1; // then return highdelay(1); //for (i=0; i<3; i++);if(DQ)value|=0x80;delay(6); // wait for rest of timeslot}return(value);}//向 1-WIRE 总线上写一个字节void write_byte(char val){byte i;for (i=8; i>0; i--) // writes byte, one bit at a time {DQ = 0; // pull DQ low to start timeslotDQ = val&0x01;delay(5); // hold value for remainder of timeslotDQ = 1;val=val/2;}delay(5);}//读取温度char Read_Temperature(void){union{byte c[2];int x;}temp;ow_reset();write_byte(0xCC); // Skip ROMwrite_byte(0xBE); // Read Scratch Padtemp.c[1]=read_byte();temp.c[0]=read_byte();ow_reset();write_byte(0xCC); //Skip ROMwrite_byte(0x44); // Start Conversionreturn temp.x/2;}。
DS18B20程序
Lesson11-1:数字温度传感器DS18B20,采用3位数码管显示,仿真通过#include <reg51.h>#define uchar unsigned char#define uint unsigned intsbit DS=P2^2; // 定义DS18B20接口uchar time=100;sbit dula=P2^6;sbit wela=P2^7;uchar code table[]={0x3f,0x06,0x5b,0x4f,0x66,0x6d,0x7d,0x07,0x7f,0x6f,0x77,0x7c,0x39,0x5e,0x79,0x71};//不带小数点编码。
uchar code table1[]={0xbf,0x86,0xdb,0xcf,0xe6,0xed,0xfd,0x87,0xff,0xef}; //带小数点编码。
void mdelay(uint z){uint x,y;for(x=z;x>0;x--)for(y=110;y>0;y--);}///////功能:串口初始化,波特率9600,方式1///////void Init_Com(void){TMOD = 0x20;PCON = 0x00;SCON = 0x50;TH1 = 0xFd;TL1 = 0xFd;TR1 = 1;}void dsreset(void) // DS18B20初始化{uint i;DS=0; // 首先拉低,要求480usi=103;while(i>0)i--;DS=1; // 上升沿,要求15~60usi=4;while(i>0)i--;}void rxwait()//等待应答脉冲{uint i;while(DS);while(~DS);i=8;while(i>0)i--;}bit tmpreadbit(void) //读一位{uint i;bit dat;DS=0;i++; //1us延时DS=1;//15us内,主机必须停止将DS引脚置低i++;i++; //15us延时dat=DS;i=8;while(i>0)i--;//读时隙不低于60us延时return (dat);}uchar tmpread(void) // 读一个字节{uchar i,j,dat;dat=0;for(i=1;i<=8;i++){j=tmpreadbit();dat=(j<<7)|(dat>>1);//读出的数据最低位在最前面,这样刚好一个字节在DA T里}return(dat); //将一个字节数据返回}void tmpwritebyte(uchar dat) //写一个字节到DS18B20里{uint i;uchar j;bit testb;for(j=1;j<=8;j++){testb=dat&0x01;dat=dat>>1;if(testb) //写1部分{DS=0;i++;i++;DS=1;i=8;while(i>0)i--;}else{DS=0; //写0部分i=8;while(i>0)i--;DS=1;i++;i++;}}}void tmpchange(void) //发送温度转换命令{dsreset();//初始化DS18B20rxwait(); //等待应答脉冲mdelay(1); //延时tmpwritebyte(0xcc); // 跳过序列号命令tmpwritebyte(0x44); //发送温度转换命令}uint tmp() //获得温度{float tt;uchar a,b;uint temp; // 存放温度值dsreset();rxwait();//等待应答脉冲mdelay(1);tmpwritebyte(0xcc);tmpwritebyte(0xbe); //发送读取数据命令a=tmpread(); //连续读两个字节数据b=tmpread();temp=b;temp<<=8; //出厂默认设置为12位分辨率temp=temp|a; //两字节合成一个整型变量。
DS18B20简单使用流程
DS18B20简单使用流程
1.复位
2.跳过ROM命令(通过单总线写入0xCC,注意时序)
3.温度转换命令(通过单总线写入0x44,延迟750-900ms)
***************************************************************
4.复位
5.跳过ROM命令
6.读温度暂存器命令(通过单总线写入0xbe,注意时序)
****************************************************************
7.开始读温度(每字节均从低位a0读起)
(读数据操作时序也分为读0时序和读1时序两个过程。
读时隙是从主机把单总线拉低之后,在1微秒之后就得释放单总线为高电平,以让DS18B20把数据传输到单总线上。
DS18B20在检测到总线被拉低1微秒后,便开始送出数据,若是要送出0就把总线拉为低电平直到读周期结束。
若要送出1则释放总线为高电平。
主机在一开始拉低总线1微秒后释放总线,然后在包括前面的拉低总线电平1微秒在内的15微秒时间内完成对总线进行采样检测,采样期内总线为低电平则确认为0。
采样期内总线为高电平则确认为1。
完成一个读时序过程,至少需要60us才能完成)
8.数据处理(将12位2进制数转成十进制数)
9.显示输出
推荐《DS18B20中文全套资料》。
ds18b20程序
; 读DS18B20的程序,从DS18B20中读出一个字节的数据
;//*****************************************//
READ_1820:
MOVR2,#8
RE1:
CLRC
SETBDLeabharlann NOP NOP
CLRDQ
NOP
NOP
NOP
SETBDQ
DJNZR0,TSR2
LJMPTSR4; 延时
TSR3:
SETBFLAG1; 置标志位,表示DS1820存在
LJMPTSR5
TSR4:
CLRFLAG1; 清标志位,表示DS1820不存在
LJMPTSR7
TSR5:
MOVR0,#06BH
TSR6:
DJNZR0,TSR6; 延时
TSR7:
LCALL READ2_18B20 ;读两个字节的温度
RET
;//*****************************************//
; 将从DS18B20中读出的温度数据进行转换
;//*****************************************//
TEMPER_COV:
MOVA,#0F0H
ANLA,TEMPER_L; 舍去温度低位中小数点后的四位温度数值
TSR3: SETB FLAG1 ;置标志位,表明DS18B20存在
CLR P2.0 ;二极管指示
AJMP TSR5
TSR4: CLR FLAG1
LJMP TSR7
;LCALL WRITE_18B20 ;写暂存器命令
18b20流程图
写完8位数据?
数据右移
延时数微秒
结束
函数功能:从ds18b20读数据 函数名date>>=1;:readonechar 返回值:temp
开始
将数据线拉高,延时1微秒
将数据线拉低,延时1微秒
将数据线拉高,延时6微秒
数据右移
如果数据线=1,data和80H或,否则data和00H或
读完8位数据?
延时数微秒 返回读到的数据
将数据线拉高,延时6微秒
将数据线拉低,延时600微秒
Байду номын сангаас
释放数据线(拉高),延时30微秒
主机从数据线采样
延时数毫秒,返回采样值
函数功能:向ds18b20写数据 函数名:writeonechar 形式参数:dat
开始
将数据线拉高,延时1微秒
将数据线拉低(启动写功能)
将数据最低位写入数据线,延时30微秒
释放数据线,延时数微秒
以下是DS18b20的流程图
时序
• 1.首先启动 :打开测温功能(1.初始化2. 命令字) • 2.调用数值 :告诉18b20调温度值(0xbe) • 3.读温度 跳过rom (0xcc) 温度变换 (0x44)
函数功能:18b20的初始化 函数名:init-ds18b20 返回值:falg 开始
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
//向 1-WIRE 总线上写一个字节 void write_byte(char val) { byte i; for (i=8; i>0; i--) // writes byte, one bit at a time { DQ = 0; // pull DQ low to start timeslot DQ = val&0x01; delay(5); // hold value for remainder of timeslot DQ = 1; val=val/2; } delay(5); }
//从 1-wire 总线上读取一个字节 byte read_byte(void) { byte i; byte value = 0; for (i=8;i>0;i--) { value>>=1; DQ = 0; // pull DQ low to start timeslot DQ = 1; // then return high delay(1); //for (i=0; i<3; i++); if(DQ)value|=0x80; delay(6); // wait for rest of timeslot } return(value); }
ds18b20 的完整程序(c51)
//DS1820 C51 子程序 //这里以 11.0592M 晶体为例,不同的晶体速度可能需要调整延时的 时间 //sbit DQ =P2^1;//根据实际情况定义端口 typedef unsigned char byte; typedef unsigned int word; //延时 void delay(word useconds) { for(;useconds>0;useconds--); } //复位 byte ow_reset(void) { byte presence; DQ = 0; //pull DQ line low delay(29); // leave it low for 480us
//读取温度 char Read_Temperature(void) { union{ byte c[2]; int x; }temp;
ow_reset(); write_byte(0xC // Read Scratch Pad temp.c[1]=read_byte(); temp.c[0]=read_byte(); ow_reset(); write_byte(0xCC); //Skip ROM write_byte(0x44); // Start Conversion return temp.x/2; }
DQ = 1; // allow line to return high delay(3); // wait for presence presence = DQ; // get presence signal delay(25); // wait for end of timeslot return(presence); // presence signal returned } // 0=presence, 1 = no part