基于ARM的数控算法图示仪设计.
基于ARM7嵌入式微控制器的智能仪表的设计
基于ARM7嵌入式微控制器的智能仪表的设计韩寿丽,董联锋,张宾中国农业大学工学院,北京 (100083)E-mail:hilary1432@摘要:本文介绍了一种基于ARM7嵌入式微控制器的多功能智能仪表的研制,给出了该仪表的软硬件设计方案。
简要介绍了仪表的硬件组成,详细阐述uC/OS-II嵌入式系统在ARM7微控制器上的移植及多任务的设计,使该仪表可以同时对多路模拟或数字信号进行采集、处理和显示。
最后以PWM输出为例,给出了PWM任务的设计方法。
关键词:嵌入式,uC/OS-II,数据采集,PWM中图分类号:TH1.引言测量仪器仪表是进行科学实验的重要工具,随着计算机技术及微电子技术的飞速发展,仪器仪表的智能化程度得到了不断的提高,其智能化突出表现在以下几个方面:微电子技术的进步深刻地影响仪器仪表的设计;DSP芯片的问世,使仪器仪表数字信号处理功能大大加强;微型机的发展,使仪器仪表具有更强的数据处理能力;图像处理功能的增加十分普遍;VXI总线得到广泛的应用等等。
ARM7微控制器因为其体积小、性能高、功耗低等优点,它们非常适合于那些将小型化作为主要要求的应用,例如访问控制和电子收款机(POS)。
由于具有大的缓冲区规模和强大的处理能力,它们非常适合于通信网关和协议转换器、软件调制解调器、声音识别以及低端的图像处理。
而多个32位定时器、PWM输出、A/D转换和GPIO使它们特别适用于工业控制和医疗系统[1]。
高校机械设计制造及自动化专业开设了机械原理和机械设计两门课,为加深学生对机械传动相关内容的理解和认识,提高动手能力,进行机械传动相关实验是必要的教学手段,然而本校的实验设备部分存在陈旧、老化等不同程度的损坏,一定程度上影响了实验精度,所以,根据教学的需要,本文研制了一种基于嵌入式ARM7微控制器的智能仪表,该仪表可对直流电机或步进电机进行调速,同时可对JSC系列转矩转速传感器、输出电压范围0-3.3V传感器,欧姆龙绝对编码器和相对编码器进行数据采集和处理,并可实现键盘扫描、LCD输出显示等功能。
《基于ARM处理器的通用数控系统的研究与设计》

《基于ARM处理器的通用数控系统的研究与设计》一、引言随着现代工业的快速发展,数控系统作为现代制造技术的重要组成部分,其性能和效率的优化已成为工业生产的关键。
而ARM处理器以其低功耗、高性能的特点,在嵌入式系统中得到了广泛应用。
因此,基于ARM处理器的通用数控系统的研究与设计具有重要的现实意义。
本文旨在探讨基于ARM处理器的通用数控系统的设计原理、实现方法及其在工业生产中的应用。
二、ARM处理器与数控系统概述ARM处理器是一种基于精简指令集(RISC)架构的低功耗、高性能的嵌入式处理器。
由于其高度的可扩展性和定制性,被广泛应用于工业控制、智能设备等领域。
数控系统则是通过数字信息实现对机械设备加工过程的全自动化控制,其性能直接影响着设备的加工精度和效率。
将ARM处理器应用于数控系统中,可以实现设备的智能化控制,提高设备的加工效率和精度。
三、系统设计1. 硬件设计基于ARM处理器的通用数控系统的硬件设计主要包括ARM 处理器核心板、电源模块、存储模块、通信模块等。
其中,ARM 处理器核心板负责处理数控系统的各种任务,电源模块为系统提供稳定的电源供应,存储模块用于存储程序和数据,通信模块则负责与其他设备进行数据交换。
2. 软件设计软件设计是数控系统的核心部分,主要包括操作系统、控制算法、人机交互界面等。
在操作系统方面,选择适用于ARM处理器的嵌入式操作系统,如Linux或Windows CE等。
控制算法则是根据具体的加工需求和设备特性进行设计和优化,以实现高精度的加工控制。
人机交互界面则负责将操作人员的指令转化为计算机可识别的语言,并实时显示设备的运行状态和加工结果。
四、关键技术及实现方法1. 运动控制技术运动控制技术是数控系统的核心技术之一,主要包括插补算法和伺服控制算法。
插补算法用于计算加工路径的中间点,以实现高精度的加工;伺服控制算法则用于控制设备的运动轨迹和速度,以保证加工的稳定性和精度。
2. 通信技术通信技术是实现数控系统与其他设备进行数据交换的关键技术。
基于ARM和DSP的嵌入式智能仪器系统设计.
基于ARM和DSP的嵌入式智能仪器系统设计1 引言随着智能仪器及控制系统对实时性信号处理的要求不断提高和大规模集成电路技术的迅速发展。
越来越迫切的要求有一种高性能的设计方案与之相适应,将DSP技术和ARM技术结合起来应用于嵌入式系统中,将会充分发挥两者优势以达到智能控制系统中对数据的实时性、高效性的通信要求。
该嵌入式系统要求实时响应,具有严格的时序性。
其工作环境可能非常恶劣,如高温、低温、潮湿等,所以系统还要求非常高的稳定性。
2 嵌入1 引言随着智能仪器及控制系统对实时性信号处理的要求不断提高和大规模集成电路技术的迅速发展。
越来越迫切的要求有一种高性能的设计方案与之相适应,将DSP技术和ARM技术结合起来应用于嵌入式系统中,将会充分发挥两者优势以达到智能控制系统中对数据的实时性、高效性的通信要求。
该嵌入式系统要求实时响应,具有严格的时序性。
其工作环境可能非常恶劣,如高温、低温、潮湿等,所以系统还要求非常高的稳定性。
2 嵌入式系统的总体设计2.1 核心器件的主要功能ARM和DSP分别选用Cirrus Logic公司的EP7312、TI公司的TMS320VC5402。
充分利用ARM丰富的片上资源和DSP强大的信号处理功能,实现高效性、实时性的信号处理及网络通信功能。
EP7312是专为高性能、超低功耗产品而设计的微处理器,采用ARM7TDMI处理器内核,具有8kB高速缓冲存储器,支持存储器管理单元,片内集成了液晶显示器控制器,键盘扫描器,数字音频接口,完全的JTAG等功能,广泛地应用于嵌入式领域。
TMS320C54xDSP提供了McBSPs(多通道缓冲串口);6通道的DMA 控制器;可以与外部处理器直接通信的8位增强HPI(主机接口)。
选择这样的SOC(片上系统)作为该系统的核心器件,使得其稳定可靠并具有广泛的扩展功能。
2.2 系统总体设计及工作原理系统总体设计框图如图1所示。
本系统主要是实现信号的实时性处理及传输,满足工业现场及各种测量仪器的高可靠性要求。
毕业论文-基于ARM和FPGA的数控系统的硬件设计(new)
目录第一章绪论51.1引言51.2研究背景及国内外发展现状61.2.1研究背景61.2.2国外发展状况71.2.3国内研究现状81.3本论文课题来源和研究内容81.3.1课题来源81.3.2研究内容81.4论文结构安排9第二章体系结构设计9 2.1 数控系统体系结构92.2 技术要求102.2.1 主要性能指标102.2.2 系统输入输出接口要求122.2.3 精度指标132.2.4 其他要求132.3 总体结构分析142.4 软硬件功能划分162.4.1 软硬件功能划分的原则162.4.2 软硬件功能划分的具体实现172.5 硬件系统划分182.6 板级功能划分202.6.1 CPU子系统202.6.2 FPGA子系统202.6.3 DA转换子系统212.6.4 信号隔离与转换子系统212.6.4 电源子系统222.7 芯片级功能划分222.7.1 总线接口模块222.7.2 复位控制模块222.7.3 中断控制模块232.7.4 定时器模块232.7.5 键盘扫描模块232.7.6编码器计数器模块232.7.7驱动器控制模块232.7. 8 IO控制模块24第三章板级硬件设计24 3.1 板级设计的原则243.1.1 模块化设计243.1.2 尽量基于成熟的设计243.1.3 可重构原则243.1.4 兼容性原则253.2 性能分析与初步设计253.2.1 CPU计算能力253.2.2 实时性263.2.3 存储能力273.2.4 FPGA的选择和IO扩展能力273.2.5 实现方案283.3 CPU子系统283.3.1 ARM子系统283.3.2 存储器子系统303.3.3 通信接口303.4 LCD接口303.5 FPGA子系统313.5.1 配置电路和下载接口313.5.2 并行接口323.6 DA转换子系统323.6.1 隔离323.6.2 转换323.6.3 放大333.7 信号隔离与转换子系统333.8 电源子系统35第四章芯片级硬件设计35 4.1 FPGA介绍354.2 FPGA的开发364.2.1 HDL语言364.2.2 开发流程与EDA软件374.3 ACEX系列FPGA374.4 功能实现394.4.1总线接口模块394.4.2 复位控制模块394.4.3 中断控制模块404.4.4 定时器模块424.4.5 键盘扫描模块434.4.6 计数器模块444.4.7驱动器控制模块464.4.8 IO控制模块464.5 HDL编写注意事项474.5.1 HDL的可综合性474.5.2 硬件思想474.5.3 良好的编码风格484.6 设计要点494.6.1 同步设计和异步设计494.6.2 与异步器件的接口问题494.6.3 面积与速度49第五章软件接口设计505.1 uC/OS-II实时操作系统505.2 引导结构515.3 硬件检测系统525.4 数控系统程序接口535.4.1 FPGA接口535.4.2 电机运动控制55第六章硬件系统调试556.1 CPU子系统556.2.1 ARM的基本调试接口JTAG556.2.2 程序的下载与NOR FLASH的烧写566.2.3 ARM系统的调试步骤576.2 LCD接口586.3 FPGA子系统586.3.1 基本电路586.3.2 驱动器控制模块596.4 DA转换子系统59第七章软硬件联调和机床加工试验59 7.1 IO控制试验597.2 DA输出试验607.3 编码器读取试验607.4 电机控制试验607.4.1 位置精度试验607.4.2 转速平稳性试验607.4.3最大速度试验607.5 加工轨迹图画图试验617.6 实际工件加工试验617.7 系统长时间连续运行试验61结束语61参考文献62攻读硕士期间论文发表情况62攻读硕士期间科研与获奖情况63致谢63第一章绪论1.1引言近年来我国企业的数控机床占有率逐年上升,在大中企业已有较多的使用,在中小企业甚至个体企业中也普遍开始使用。
基于ARM微处理器的嵌入式数据记录仪的设计(1)_图文.

嵌入式技术电子测量技术ELECTRONICⅣ哐ASUREMENT TE(:HNOLoGY 第32卷第9期 2009年9月基于ARM微处理器的嵌入式数据记录仪的设计王阳苗克坚朱峰(西北工业大学计算祝学院西安710129接要:在航电系统设计中。
航空电子设备的使用通常面临很恶劣的环境,其运行状态的稳定性和可靠性是永恒的主题,因此在其运行时进行数据记录以备事后分析是很有必要的。
本文结合嵌入式技术和实时存储技术,采用数据记录和下载分时进行的策略,提出了基于ARM微处理器的嵌入式数据记录仪的设计方案。
文中着重研究了板载微处理器和存储系统的电路设计以及与USB主机的接口设计,最后以1553B总线为例,提出了一个具体的设计方案,并引入了适合实时数据采集的顺序记录式存储系统。
经过实践验证,该系统可以满足在恶劣环境下对航电设备进行实时可靠的数据记录的需求。
关键词:数据记录仪;实时存储技术;1553B总线;嵌入式计算中图分类号:TP302.1文献标识码:AEmbedded data recorder design based on ARM microcontrollerWang Yang Miao Kejian Zhu Feng(School Of Computer Science and Engineering,Northwestern Polytechnical University,Xi’an 710129Abstract:When designing the aviation device,recording some parameters are needed tO keep the stability and reliability because of its worse situation.With embedded computing technology and real-time storage technology。
基于ARM的嵌入式数控系统的研究

基于ARM的嵌入式数控系统的研究一、本文概述随着科技的快速发展,嵌入式系统在各领域的应用越来越广泛,尤其在工业控制、自动化设备以及智能家居等领域中发挥着至关重要的作用。
而基于ARM的嵌入式数控系统,凭借其高性能、低功耗以及良好的扩展性,成为了众多研究者关注的焦点。
本文旨在探讨基于ARM的嵌入式数控系统的研究现状、设计原理、实现方法以及未来发展趋势,以期为相关领域的研究与应用提供有益的参考。
本文将对嵌入式数控系统的基本概念进行介绍,阐述其与传统数控系统的区别与优势。
将重点分析基于ARM的嵌入式数控系统的硬件架构和软件设计,包括处理器选择、外设接口设计、操作系统移植以及数控算法的实现等方面。
还将探讨系统在实际应用中的性能表现,包括实时性、稳定性以及可靠性等方面的评估。
本文还将对基于ARM的嵌入式数控系统的未来发展趋势进行展望,分析其在智能制造、工业自动化等领域的应用前景,以及面临的挑战和机遇。
希望通过本文的研究,能够为嵌入式数控系统的进一步发展提供有益的启示和建议。
二、ARM架构与嵌入式数控系统基础ARM(Advanced RISC Machines)架构是一种精简指令集(RISC)处理器架构,广泛应用于嵌入式系统领域。
ARM架构以其低功耗、高性能和低成本等特点,成为了嵌入式系统市场的主流选择。
ARM处理器通常由内核、存储器和输入输出设备组成,具有高效的处理能力和灵活的扩展性。
这使得ARM架构在数控系统中的应用具有显著的优势,如提高系统性能、降低能耗和缩小体积等。
嵌入式数控系统是一种将计算机技术与数控技术相结合的系统,广泛应用于机械加工、自动化生产线等领域。
嵌入式数控系统通过ARM架构的处理器实现对加工过程的精确控制,实现对加工参数、运动轨迹和加工状态的实时监控和调整。
这种系统具有高度的集成性和智能化,可以提高加工精度和效率,降低人工干预和操作难度。
在基于ARM的嵌入式数控系统中,ARM处理器作为核心控制器,负责处理各种指令和数据,实现对加工过程的精确控制。
基于ARM处理器的数控系统设计
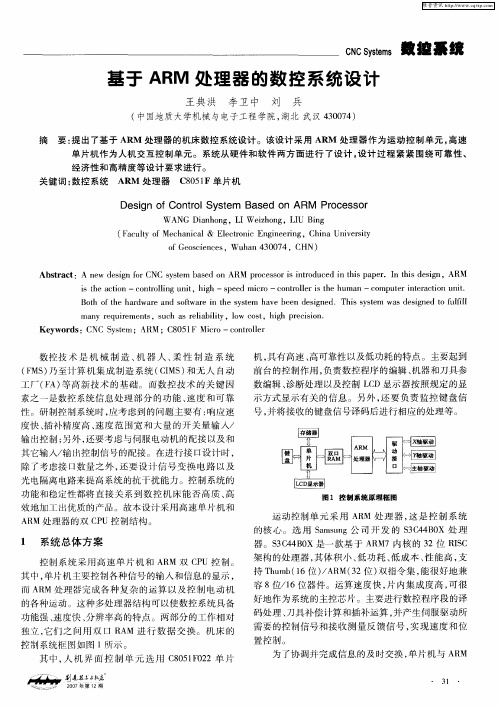
图 1 控 制 系 统 原 理 框 图
1 系统 总 体 方 案
控 制 系 统 采用 高 速 单 片 机 和 A M 双 C U控 制 。 R P 其中, 单片 机主要 控 制各种 信 号 的输 入 和信息 的显 示 , 而 AR 处 理器 完成 各种 复 杂 的运 算 以及控 制 电动 机 M 的各 种运 动 。这 种 多处理 器结 构可 以使 数控 系统 具备
数 控 技 术 是 机 械 制 造 、 器 人 、 性 制 造 系 统 机 柔
机 , 有高 速 、 具 高可靠 性 以及低 功耗 的特 点 。主要起 到 前 台的控制 作用 , 责数 控程 序 的编辑 、 负 机器 和刀具 参
数 编辑 、 断处 理 以及 控 制 L D显示 器 按照 规定 的显 诊 C
示 方式 盘 信 还
号, 将接 收 的键盘 信号译 码后 进行 相应 的处 理等 。 并
度快 、 插补 精度 高 、 速度 范 围宽 和 大量 的开 关 量 输 入/
输 出控制 ; 另外 , 还要 考虑 与伺 服 电动机 的配接 以及 和 其它输 入/ 出控 制 信 号的配接 。在 进行 接 口设计 时 , 输 除 了考虑 接 口数 量 之外 , 还要 设 计 信 号 变换 电路 以及
器 。S C 4 O 3 4 B X是一 款基 于 A M R 7内核 的 3 2位 R S IC 架 构 的处 理器 , 其体 积 小 、 功耗 、 成 本 、 能 高 , 低 低 性 支
持 T u b 1 )A M(2位 ) 指令集 , h m (6位 / R 3 双 能很 好地 兼 容 8位/ 6位 器件 。运算 速 度 快 , 内集 成 度高 , 很 1 片 可
《基于ARM处理器的通用数控系统的研究与设计》
《基于ARM处理器的通用数控系统的研究与设计》一、引言随着工业自动化和智能制造的快速发展,数控系统作为现代制造业的核心技术,其性能和效率的提升对于提高生产质量和降低成本具有重要意义。
本文将针对基于ARM处理器的通用数控系统展开研究与设计,探讨其技术特点、系统架构、设计方法及实际应用。
二、ARM处理器技术特点ARM处理器作为一种低功耗、高性能的嵌入式处理器,具有以下技术特点:1. 低功耗:ARM处理器采用先进的制程技术和低电压设计,具有较低的功耗,适用于长时间运行的数控系统。
2. 高性能:ARM处理器具有强大的计算能力和高速的数据处理能力,能够满足数控系统对实时性和准确性的要求。
3. 灵活性:ARM处理器支持多种操作系统和开发环境,可根据实际需求进行定制化开发。
三、系统架构设计基于ARM处理器的通用数控系统架构主要包括硬件和软件两部分。
1. 硬件架构:(1)ARM核心处理器:作为整个系统的控制中心,负责数据处理和指令执行。
(2)存储模块:包括内存、存储器等,用于存储程序代码、数据和结果。
(3)输入输出模块:包括人机交互界面、传感器、执行器等,实现与外部设备的通信和控制。
(4)电源模块:为整个系统提供稳定的电源供应。
2. 软件架构:(1)操作系统:采用嵌入式操作系统,如Linux或RTOS,实现多任务管理和资源调度。
(2)数控系统软件:包括数控编程软件、运动控制软件、数据管理软件等,实现数控系统的各项功能。
四、设计方法与实现基于ARM处理器的通用数控系统的设计方法与实现主要包括以下几个方面:1. 硬件设计:根据实际需求选择合适的ARM处理器型号和外围电路元件,设计合理的电路板布局和电路连接方式,确保系统的稳定性和可靠性。
2. 软件设计:采用模块化设计思想,将数控系统软件划分为多个功能模块,分别进行开发和调试。
同时,采用优化算法和数据处理技术,提高系统的运算速度和精度。
3. 运动控制算法设计:根据实际加工需求,设计合适的运动控制算法,如插补算法、速度控制算法等,确保加工过程的稳定性和精度。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于ARM的数控算法图示仪设计
摘要:设计一种研究数字控制(尤其是各种数字插补算法及其性能和状态的研究)的专用数字图示仪,其适用于数控人才培养。
该图示仪能对控制芯片发出的各类脉冲和电平信号实时捕获,并进行分析,通过图形的形式形象地将插补算法,脉冲信号以及运动轨迹之间的关系以一组按比例缩放的脉冲序列和一个坐标图的形式显示出来。
它具有结构简单,价格低廉,功能实用等特点。
关键词:ARM;数控;数字图示;脉冲插补;运动轨迹
0 引言
在数字控制的研究中经常需要检测多轴驱动器输出脉冲,以了解算法、插补脉冲、运动轨迹及其三者之间的关系。
采用普通示波器虽然可以查看脉冲,但由于多数示波器是基于两轴设计的,对三轴和多轴的情况进行观察时操作很不方便,并且不能反映出脉冲和运动轨迹之间的关系。
此外,在数控人才培训的过程中,初学者通过轨迹仿真这一过程来理解和分析整个机床各机构的工作原理具有一定的困难,要再进一步分析插补脉冲和机床运动之间的关系难度更大。
在此设计了一种基于ARM嵌入式处理器的专用数字图示仪,能帮助仅具有基本操作知识的使用者,直观清楚地了解插补过程中各轴脉冲的关系和对应算法下刀具运动的轨迹。
1 系统硬件设计
系统以采用NXP公司的ARM7 LPC2136高速处理器作为核心处理硬件,该处理器体积少,功耗低,价格便宜,性能较高,I/O资源丰富,运算速度满足系统需求。
根据功能的设计要求,系统的硬件组成划分为面板控制模块、液晶显示模块、核心处理单元和运动控制模块4大部分,如图1所示。
面板控制模块是由电位器、琴键开关和扭置开关等组成的简单电路,供使用者进行输入设置和调整。
ARM处理器通过A/D采样和电平检测,获取电位器分担的电压和各个开关的状态,从而获取输入信息。
之后根据输入信息处理,及时调整液晶屏幕上的显示,实现示波调整和观测内容切换的功能。
液晶显示模块采用的是金鹏电子生产的OCM 128×128液晶显示屏,其成本低,体积小,信号处理简单,驱动技术成熟,十分适合本系统的应用。
液晶屏的地址和数据共用数据总线,通过专用端口(如 C/D,CE,RD,WR等)控制数据和命令的输入与输出,其接口关系和时序简单明确,在ARM处理器上编写驱动程序十分简单。
运动控制模块基于专用运动控制芯片MCX314,它拥有4轴(x,y,z,μ轴)驱动能力。
MCX314芯片向步进电动机驱动器输出高低电平来控制电机的转动方向;输出变频脉冲信号来控制电机的转速。
在一定的频率范围内,芯片输出脉冲频率越高,电机的转速越高。
ARM处理器对MCX314的输出脉冲进行捕获,获取脉冲的时延,准确测得各轴的频率值,再通过软件算法将插补脉冲与刀具的运动速度和运动方向结合起来,产生运动轨迹数据,通过显示器模拟出
来。
从而直观地显示出脉冲插补和运动轨迹的对应关系,达到预期的实验效果。
系统的具体实现上,MCX314输出的信号分别为方向信号(高低电平)和脉冲信号,PP代表脉冲;PM代表方向;z,y,z分别对应各方向轴。
液晶屏采用 I/O方式驱动,ARM处理器由P0.12~PO.15端口输出控制信号,由
P0.16~P0.23端口写入或读取数据。
显示波形的纵向增益、横向增益、触发电平及波形的扩展分别通过4个不同的电位器控制,ARM处理器对电位器上的电压进行A/D采样获取输入信息。
另外,还设计了脉冲、特性和电压测试,以扩展该数字图示仪的应用场合。
2 软件系统设计
软件系统由运行在实时操作系统μC/OS-Ⅱ上的两个任务和独立于操作系统的一个中断服务程序组成。
显示更新任务负责将传人数据以图形方式及时准确地显示在显示屏上;操作检测任务负责将外界各项操作的电平信号转换为一定格式的数据传递给操作系统的其他任务,以便下一步处理;脉冲捕获中断服务程序负责计算运动控制芯片发送的脉冲频率,并检测方向电平的状态,确定电机转动方向。
系统软件架构如图2 所示。