三洋驱动器调试参数(PY)
三洋伺服增益调整
三洋伺服增益调整步骤几个基本参数介绍KP1:位置环比例增益(Group0 02)FFGN:前馈增益(Group0 05)KVP1:速度环比例增益(Group0 12)TVI1:速度环时间参数(Group0 13)JRAT1:负载惯量比(Group0 14)TRCVGN:高跟随速度控制补偿增益(Group0 15)TCFIL1:转矩指令滤波器(Group0 20)四个陷波滤波器(A,B,C,D)TCNFILA:指令陷波滤波器A(Group1 20)TCNFILB:指令陷波滤波器B(Group1 22)TCNFDB:指令陷波滤波器B深度选(Group1 23)TCNFILC:指令陷波滤波器C(Group1 24)TCNFDC:指令陷波滤波器C深度选(Group1 25)TCNFILD:指令陷波滤波器D(Group1 26)TCNFDD:指令陷波滤波器D深度选(Group1 27)作用:用于抑制伺服共振点例如:系统分析后得到伺服共振点为1000HZ,可以在A,B,C,D陷波滤波器任意一个写入1000,可以达到抑制共振点的目的。
在手动调整模式下,最好从陷波滤波器B开始使用,因为在自动模式下得到的共振点会默认填写在陷波滤波器A,防止被覆盖。
滤波深度:共振点100HZ以上建议使用00,,800HZ~1000HZ建议使用01,500~800HZ建议使用02 ,500HZ以下建议使用03。
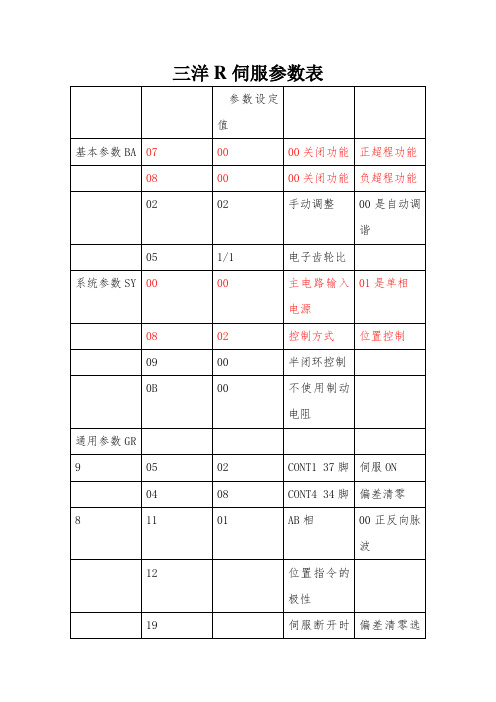
自动调整方式:1.设定相关参数在Group0选项内00设为Auto Tun02调整响应性(刚性)此功能在手动调整模式下无效03 设置为Auto Saving2.自动调整运行⑴点击菜单栏Auto Tuning,选择Auto Notch Filter Tuning⑵弹出窗口,设定Torque command 马达输出强度,开始设置为50%(后面慢慢往上加),然后按下图1,2,步骤操作⑶手动保存自动调整的结果选择Save Rseult of Auto Tuning 进入参数保存界面如下图1设定结束后是否提示报警。
三洋R伺服参数表及接线图
B
13
30
越小越好
14
越大越好
04
08
CONT4 34脚
偏差清零
8
11
01
AB相
00正反向脉波
12
位置指令的极性
19
伺服断开时清零
偏差清零选择
1
2
70
位置环
各轴设置一样
13
120
速度环
14
20.0
积分时间
15
惯量比
A
02
02运转Leabharlann 备结束时ON030A
42号脚接刹车 Z轴带刹车才设
C
00
01
增量式编码器
05
1/1
编码器分频比
06
1
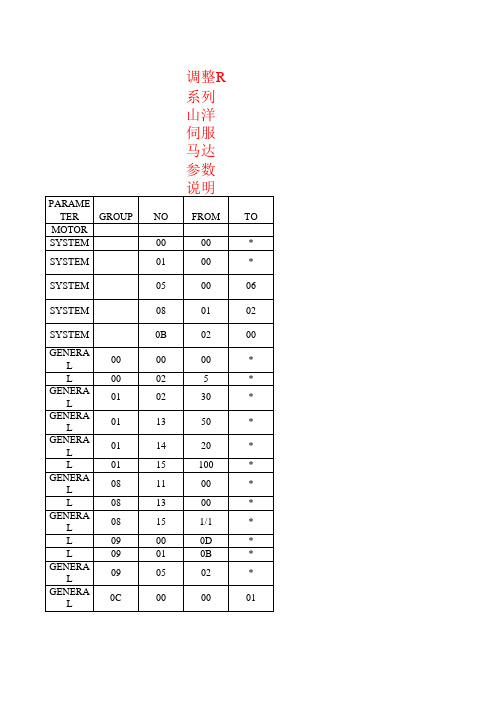
三洋R伺服参数表
参数设定值
基本参数BA
07
00
00关闭功能
正超程功能
08
00
00关闭功能
负超程功能
02
02
手动调整
00是自动调谐
05
1/1
电子齿轮比
系统参数SY
00
00
主电路输入电源
01是单相
08
02
控制方式
位置控制
09
00
半闭环控制
0B
00
不使用制动电阻
通用参数GR
9
05
02
CONT1 37脚
伺服ON
山洋伺服马达参数设定
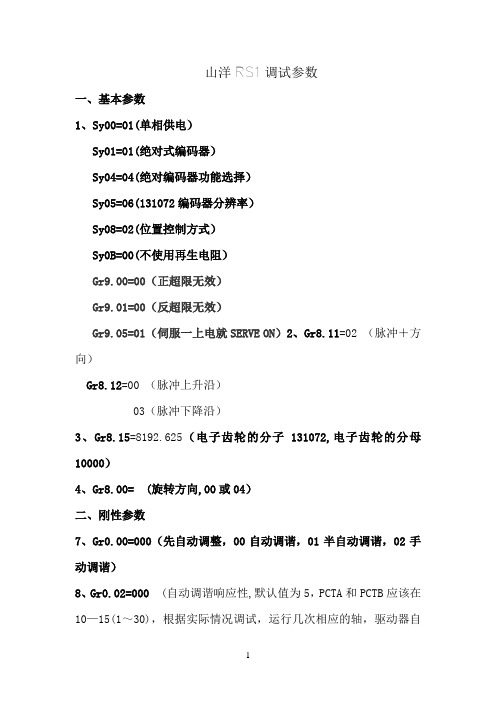
调整R 系列山洋伺服马达参数说明
注:“○”为必须设置项;“△”为根据实际需要选设项;“╳”为不适用
以上通常用到的伺服马达参数,若有不明白或者其它参数请参考使用说明书
编码器接线:粉红---1 紫色---2 棕色
蓝色---14 红色---19 黑色---20
是否有干扰判断:
观察Monitor display中OA,OC项数据是否相等,0C为外部输入的脉冲.如果PLC没有发脉冲时此值有变
要选设项;“╳”为不适用
不明白或者其它参数请参考使用说明书
棕色----13
黑色---20
是否相等,0C为外部输入的脉冲.如果PLC没有发脉冲时此值有变化,说明有外部干扰。
三洋RS1调试参数
山洋RS1调试参数一、基本参数1、Sy00=01(单相供电)Sy01=01(绝对式编码器)Sy04=04(绝对编码器功能选择)Sy05=06(131072编码器分辨率)Sy08=02(位置控制方式)Sy0B=00(不使用再生电阻)Gr9.00=00(正超限无效)Gr9.01=00(反超限无效)Gr9.05=01(伺服一上电就SERVE ON)2、Gr8.11=02 (脉冲+方向)Gr8.12=00 (脉冲上升沿)03(脉冲下降沿)3、Gr8.15=8192.625(电子齿轮的分子131072,电子齿轮的分母10000)4、Gr8.00= (旋转方向,00或04)二、刚性参数7、Gr0.00=000(先自动调整,00自动调谐,01半自动调谐,02手动调谐)8、Gr0.02=000 (自动调谐响应性,默认值为5,PCTA和PCTB应该在10—15(1~30),根据实际情况调试,运行几次相应的轴,驱动器自动整定Gr1.15(转动惯量比JART1,默认值为100(0~15000)),Gr1.02(位置环增益KP1,默认值为30(1~3000)),Gr1.13(速度环增益KVP1,默认值为50(1~2000)),Gr1.14(速度环积分时常TV11,默认值为200(0.5~1000.0)),在运动过程中驱动器根据负载实时更改参数,所以在自动调整时相应的负载要装配完毕,否则自动整定后的参数不准确!9、Gr0.00=0002(对于PCTA和PCTB在联调出光完毕后,更改Gr0.00=0002(手动调整模式,固定转动惯量比),固化调谐参数。
二、刚性参数手动调节7、Gr0.00=002(先自动调整,00自动调谐,01半自动调谐,02手动调谐)Gr1.02=130(位置环增益KP1,默认值为30(1~3000))Gr1.13=110(速度环增益KVP1,默认值为50(1~2000)),Gr1.14=10(速度环积分时常TV11,默认值为200(0.5~1000.0)),Gr1.15=200(转动惯量比JART1,默认值为100(0~15000)),10、用手模联轴器就可以判断调整伺服刚性否合适!。
安川&山洋驱动器的调整
安川&山洋驱动器的调整1.伺服驱动概述2.常用参数的调整3.常见故障分析及解决一.伺服驱动概述伺服电机概述伺服系由三个反馈系构成( 位置环、速度环、电流环),越是内侧的环,越需要提高其响应性。
如果不遵守该原则,则会产生响应性变差或产生震动。
一般的说,不能使位置环的响应性高于速度环的响应性,不能使速度环的响应性高于电流环的响应性。
因此,当提高位置环增益时,首先需提高速度环增益。
如果只提高位置环增益,会引起速度指令震动,反而延长定位时间,电流环的增益一般不需要调整。
我们所用的HI800L系统都是模拟量控制的速度控制模式,安川电机和山洋电机都属于日系的伺服电机,电压等级都是三相220V或单相220V。
二.常用参数的调整参数号出厂设定功能描述备注Pn10040速度环增益Pn1012000速度环积分时间Pn1030惯性比单位:%Pn1100010调谐模式再次上电时有效设为:0012Pn20116384PG分频比再次上电时有效Pn300600速度指令输入增益单位:0.01V/额定转速设为:800Pn50A2100输入信号选择设为:8100 Pn50B6543输入信号选择设为:6548 Fn005参数初始化Fn009自动调整零漂Fn00A手动调整零漂安川SGDM(ΣⅡ系列)750W以上的电机常用参数如下表安川SGDM(ΣⅡ系列)面板操作器界面及按键说明安川SGDM(ΣⅡ系列)面板操作器模式调整方法注意事项:1.增益Pn100的调整,必须保证X轴与Y轴一致,否则切割出来的圆肯定不圆。
2.积分时间常数大致标准为Pn101≥2.3÷(2×π×Pn100)×100000,通常取Pn101=4÷(2×π×Pn100)×100000即可。
3.ΣⅡ系列惯性比Pn103的调整:先将Pn110改为0001,然后移动需要调整的轴,在移动过程中观察Fn007的值,按下DSPL/SET 键,显示闪烁一秒钟,惯性比的值得到保存,或者取中间值将此值写入Pn103中,恢复Pn110=0012即可。
利用PC读取sanyo(三洋) R系列伺服驱动器参数
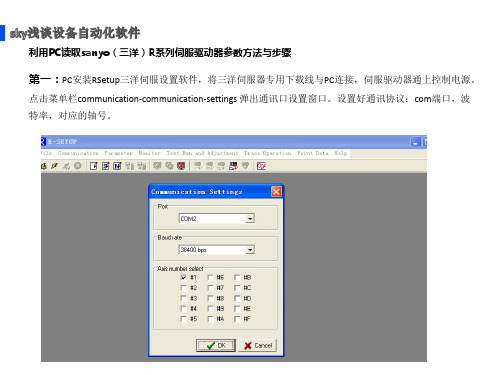
利用PC读取sanyo(三洋)R系列伺服驱动器参数方法与步骤
第一:PC安装RSetup三洋伺服设置软件,将三洋伺服器专用下载线与PC连接,伺服驱动器通上控制电源。
点击菜单栏communication-communication-settings 弹出通讯口设置窗口。设置好通讯协议:com端口,波 特率,对应的轴号。
parameter[amplifier->file],如左图,弹出parameter-transmit parameter窗口,点击browse将参数保存到一 个路径,点击execute,如右图
第四:将伺服驱动器参数上传至PC并保存为文件,点击R-setup软件菜单栏-parameter-transmit
parameter[amplifier->file],如左图,弹出parameter-transmit parameter窗口,点击browse将参数保存到一 个路径,点击execute,如右图
第五:查看伺服驱动器报警履历,点击菜单栏-monitor-alarm history display 弹出报警履历窗口,current
第二:点击R-setup软件菜单栏-c窗口。点击check,state
显示connected,表示三洋伺服驱动器与PC连接成功。
第三:将伺服驱动器参数上传至PC并保存为文件,点击R-setup软件菜单栏-parameter-transmit
三洋伺PY系列服控制器中文手册第五章

• • • • •
5-5
5. 安装
• 不能把连接器朝上安装,只能朝下安装。连接器(引线出口)朝下安装时,请给电缆以 一定松驰度以防止水(油)的侵入。 • 齿轮箱的油面高度要比油封唇部低(该高度只允许油溅到油封唇部上) 。 • 设置通孔以防止齿轮箱内压力升高。
� 相关机械的配合 • 按图 5-8 对电机轴与相关机械进行精密的同心配合。 尤其是使用刚性联接器时,微小偏心也可能造成输出轴受损伤,故务必保证同心。
运转时 轴向负荷(N) F 方向 10 10 10 10 10 50 30 30 30 3 3 3 8 10 20 2 3 3 8 8 8 10 10 10 20 20 20 20 35 50 50 50 50 F1 方向 10 10 10 10 10 50 30 30 30 3 3 3 8 10 20 2 3 3 8 8 8 10 10 10 20 20 20 20 35 50 50 50 50
5-9
5-1
5. 安装
5.1 伺服驱动器安装
参考伺服驱动器安装场所和方法 5.1.1 安装场所 参照下列来安装伺服驱动器。 实 例 注 意 事 项 由于内部机器的电耗及箱体的尺寸因素的 影响,在箱内的温度会比外界的温度高很 多。注意考虑箱的大小、冷却系统及布置方 法,以确保伺服驱动器的周围温度在 55℃ (131℉)以下。 为保证伺服驱动器的寿命和高可靠性, 推荐 箱内温度在 40℃(104℉)以下使用。
图 5-4
5-4
5. 安装
� 防 潮 伺服电机作为一个独立单元,符合 IEC 标准(IEC34-5) 。然而,该标准需在过一段时 间后进行性能检查。下列防潮措施在实际应用中很有必要。小心处理该系统,否则连 接器外壳会受损,降低防水功能。 P8 系列电机和航空插头型的 P1、P2 和 P6 系列电机使用一个防水的连接器或在航空连 接器的另一侧接一个导管,就可等同于 IP67。 P3 系列电机和法兰为 30mm 和 40mm 的 P5 系列电机的防水性等同于 IP40,法兰为 50mm, 70mm 和 80mm 的 P5 系列电机防水性等同 IP55。 连接器(导线出口)向下的角度范围如下图。 防护罩要面向水(油)飞溅方向安装。 防护罩应倾斜,使水(油)不会积滞。 避免电缆浸入水(油)中。 为了不使水侵入电机,防护罩外的电缆要带有一定松弛度。
沈阳三洋调试资料

沈阳三洋电梯主板调试说明SM-01-E输入输出接口定义:★ JP1, JP2, JP3 为外部开关信号输入口,公共端为JP3-7、8JP1.01: 输入 X0,检修信号,断开为检修,闭合为自动JP1.02: 输入 X1,上行信号. 在检修时闭合为点动上行,在司机时闭合为上行换向JP1.03: 输入 X2,下行信号. 在检修时闭合为点动下行,在司机时闭合为下行换向JP1.04: 输入 X3,上行多层终端换速开关, 2 米/秒以上电梯要求使用,(低速电梯不用此信号时,请设置输入类型 X3 为常开)JP1.05: 输入 X4,下行多层终端换速开关, 2 米/秒以上电梯要求使用,(低速电梯不用此信号时,请设置输入类型 X4 为常开)JP1.06: 输入 X5,上行限位开关JP1.07: 输入 X6,上行限位开关JP1.08: 输入 X7,上行单层终端换速开关.JP3.09: 输入 X8,下行单层终端换速开关.JP1.10: 输入 X9,上平层干簧JP2.1: 输入 X10,下平层干簧JP2.2: 输入 X11,调速器故障输出信号JP2.3: 输入 X12,消防开关JP2.4: 输入 X13,安全回路继电器检测JP2.5: 输入 X14,门锁回路继电器检测JP2.6: 输入 X15,调速器进线接触器检测JP2.7: 输入 X16,调速器出线接触器检测JP2.8: 输入 X17,抱闸继电器检测JP2.9: 输入 X18,门区信号输入,用于开门再平层和提前开门,闭合有效JP2.10: 输入 X19,调速器运行信号检测,检测到此信号闭合则抱闸可以张开JP3.01: 输入 X20,提前开门继电器检测JP3.02: 输入 X21,备用JP3.03: 输入 X22,抱闸开关JP3.04: 输入 X23,备用JP3.05: 输入 X24,备用JP3.06: 输入 X25,备用JP3.07: X0-X25 输入信号公共端JP3.08: X0-X25 输入信号电源端JP3.09: X0-X25 输入信号公共端,0V.JP3.10: X0-X25 输入信号电源端,+24V.★输入信号常开点/常闭点设置的意义是:如果此信号没有动作,输出信号是导通的,则称此信号为常闭信号。