第6.1节 增强型脉宽调制器(ePWM)
6正弦波脉宽调制逆变器的MATLAB仿真
6 正弦波脉宽调制逆变器的MATLAB仿真6.1正弦波脉宽调制逆变器的原理和仿真模型6.1.1正弦波脉宽调制逆变器的原理由于期望的逆变器输出是一个正弦电压波形,可以把一个正弦半波分作N 等分。
然后把每一等分的正弦曲线与横轴所包围的面积都用个与此面积相等的等高矩形脉冲来代替,矩形脉冲的中点与正弦波每一等分的中点重合。
这样,由N 个等幅不等宽的矩形脉冲所组成的波形为正弦的半周等效。
同样,正弦波的负半周也可用相同的方法来等效。
这一系列脉冲波形就是所期望的逆变器输出SPWM波形。
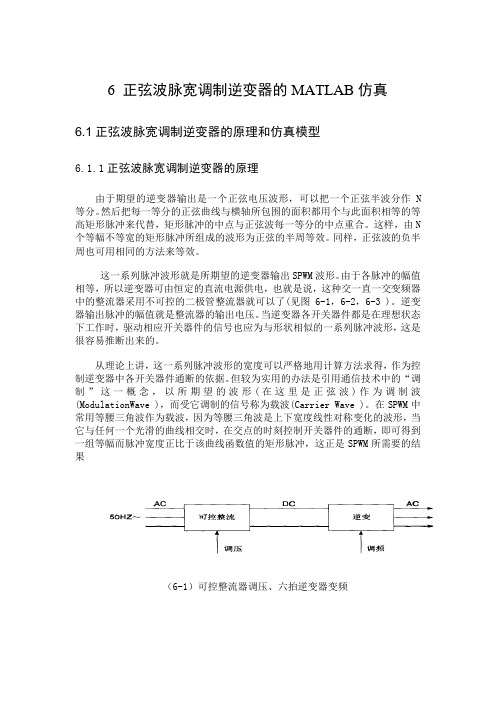
由于各脉冲的幅值相等,所以逆变器可由恒定的直流电源供电,也就是说,这种交一直一交变频器中的整流器采用不可控的二极管整流器就可以了(见图6-1,6-2,6-3 )。
逆变器输出脉冲的幅值就是整流器的输出电压。
当逆变器各开关器件都是在理想状态下工作时,驱动相应开关器件的信号也应为与形状相似的一系列脉冲波形,这是很容易推断出来的。
从理论上讲,这一系列脉冲波形的宽度可以严格地用计算方法求得,作为控制逆变器中各开关器件通断的依据。
但较为实用的办法是引用通信技术中的“调制”这一概念,以所期望的波形(在这里是正弦波)作为调制波(ModulationWave ),而受它调制的信号称为载波(Carrier Wave )。
在SPWM中常用等腰三角波作为载波,因为等腰三角波是上下宽度线性对称变化的波形,当它与任何一个光滑的曲线相交时,在交点的时刻控制开关器件的通断,即可得到一组等幅而脉冲宽度正比于该曲线函数值的矩形脉冲,这正是SPWM所需要的结果(6-1)可控整流器调压、六拍逆变器变频(6-2)不控整流、斩波器调压、六拍逆变器变频(6-3)不控整流、PWM逆变器调压调频1.工作原理图6-4是SPWM变频器的主电路,图中VTl-VT6是逆变器的六个功率开关器件(在这里画的是IGBT),各由一个续流二极管反并联,整个逆变器由恒值直流电压U供电。
图6-5是它的控制电路,一组三相对称的正弦参考电压信号由参考信号发生器提供,其频率决定逆变器输出的基波频率,应在所要求的输出频率范围内可调。
正弦波脉宽调制代码

正弦波脉宽调制代码
脉宽调制(PWM)是一种常用的信号调制技术,用于控制电子设备中的各种功能。
它可以通过改变信号的脉冲宽度来控制输出信号的平均功率。
正弦波脉宽调制(SPWM)是一种特殊的PWM技术,它使用正弦波信号作为调制信号。
SPWM技术在电力电子领域有着广泛的应用。
例如,它可以用于变频器控制,将直流电源转换为交流电源。
此外,SPWM技术还可以在音频放大器中使用,通过调制音频信号的脉冲宽度来控制音量大小。
SPWM技术的实现相对简单。
首先,需要一个正弦波信号作为调制信号。
这个信号可以通过一个简单的振荡电路产生。
然后,将调制信号与一个高频的方波信号进行比较。
当调制信号的幅度大于方波信号时,输出信号为高电平;当调制信号的幅度小于方波信号时,输出信号为低电平。
通过改变调制信号的幅度和频率,可以控制输出信号的平均功率和频率。
SPWM技术的优点在于可以产生接近正弦波的输出信号。
由于正弦波信号具有较低的谐波含量,因此SPWM技术可以减小输出信号中的谐波成分,提高系统的效率。
此外,SPWM技术还可以实现精确的电压和频率控制,满足不同应用的需求。
正弦波脉宽调制是一种常用的信号调制技术,广泛应用于电力电子
和音频放大器等领域。
它通过改变信号的脉冲宽度来控制输出信号的平均功率和频率。
SPWM技术具有接近正弦波的输出特性,可以减小谐波成分,提高系统的效率。
通过合理的调制信号设计,可以实现精确的电压和频率控制,满足各种应用需求。
脉宽调制原理

脉宽调制原理
脉宽调制(Pulse Width Modulation,PWM)是一种常用的调
制技术,通常应用于电子电路中。
脉宽调制的原理是通过改变信号的脉冲宽度来控制电路输出的电平。
脉宽调制一般使用方波信号来进行调制,通过调整方波的高电平时间和低电平时间的比例,来实现对输出电平的控制。
在脉宽调制中,通常有一个固定的载波频率,称为调制频率。
通过控制脉冲的宽度,即高电平时间,来决定输出信号的电平。
当脉冲宽度较窄时,即高电平时间较短,输出信号的电平较低;当脉冲宽度较宽时,即高电平时间较长,输出信号的电平较高。
脉宽调制常用于控制电器设备的功率输出,如直流电机的速度调节、音频信号的放大等。
它可以通过自动控制电路实现动态调节,使得输出信号在一定的范围内连续变化。
脉宽调制技术在工程实践中应用广泛,具有调节灵活、精度高、输出功率大等特点。
同时,它也具有一定的噪声特性,需要在工程设计中充分考虑,采取适当的滤波措施以提高输出信号的质量。
总而言之,脉宽调制是一种基于脉冲宽度调节的技术,通过控制脉冲的宽度来控制输出信号的电平,广泛应用于电子电路中。
DSP原理及应用技术第6.1节 增强型脉宽调制器(ePWM)

CTR=PRD:时间基准计数器值等于指定的周期值 (TBCTR=TBPRD);
CTR=ZERO:时间基准计数器等于零(TBCTR = 0x0000)。 ⑦配置时间基准的时钟率,即对CPU系统时钟
第6章 DSP片上控制与采样外设
6.1 增强型脉宽调制器(ePWM)
6.1 增强型脉宽调制器(ePWM)
6.1.1 ePWM模块概述 • 增强型脉冲宽度调制器( ePWM ) • ePWM模块中每个完整的PWM通道都是由两个PWM输
出组成,即ePWMxA和 ePWMxB • 有时为了能够更精确控制PWM输出,加入了硬件扩
(3)递增递减计数模式
时间基准计数器从零递增到周期值,当达到周期值,时间基 准计数器开始递减直至零,此时再递增重复运行。
Hale Waihona Puke 时间基准子模块(TB)时间基准周期映射寄存器 (1)当前工作寄存器(active register)。 (2)映射寄存器(shadow register)。 (3)时间基准周期映射模式。 (4)时间基准周期立即装载模式。
时间基准计数器有三种操作模式,可通过时间基准计数 寄存器(TBCTL)选择:
(1)递增计数模块
时间基准计数器从周期值,当达到周期值,时间基准计数器 复位置零,此时再重新开始递增计数,重复运行。
(2)递减计数模式
时间基准计数器从周期值递减到零,当达到零值时,时间基 准计数器重置周期值,此时再重新递减重复运行。
6.1 增强型脉宽调制器(ePWM)
ePWM子模块概述
• ePWM模块主要包含以下7部分:时间基准子模块;计数比 较子模块;动作限定子模块;死区控制子模块;PWM斩波 子模块;错误区域控制子模块和事件触发子模块。
PWM脉冲宽度调制
PWM脉冲宽度调制脉冲宽度调制百科名片脉冲宽度调制脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术,广泛应用在从测量、通信到功率控制与变换的许多领域中。
目录简介基本原理具体过程脉冲宽度调制优点控制方法脉冲宽度调制相关应用领域具体应用简介基本原理具体过程脉冲宽度调制优点控制方法脉冲宽度调制相关应用领域具体应用展开编辑本段简介脉冲宽度调制是一种模拟控制方式,其根据相应载荷的变化来调制晶体管栅极或基极的偏置,来实现开关稳压电源输出晶体管或晶体管导通时间的改变,这种方式能使电源的输出电压在工作条件变化时保持恒定,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。
PWM控制技术以其控制简单,灵活和动态响应好的优点而成为电力电子技术最广泛应用的控制方式,也是人们研究的热点.由于当今科学技术的发展已经没有了学科之间的界限,结合现代控制理论思想或实现无谐振软开关技术将会成为PWM控制技术发展的主要方向之一。
编辑本段基本原理随着电子技术的发展,出现了多种PWM技术,其中包括:相电压控制PWM、脉宽PWM法、随机PWM、SPWM法、线电压控制PWM等,而在镍氢电池智能充电器中采用的脉宽PWM法,它是把每一脉冲宽度均相等的脉冲列作为PWM波形,通过改变脉冲列的周期可以调频,改变脉冲的宽度或占空比可以调压,采用适当控制方法即可使电压与频率协调变化。
可以通过调整PWM的周期、PWM的占空比而达到控制充电电流的目的。
模拟信号的值可以连续变化,其时间和幅度的分辨率都没有限制。
9V电池就是一种模拟器件,因为它的输出电压并不精确地等于9V,而是随时间发生变化,并可取任何实数值。
与此类似,从电池吸收的电流也不限定在一组可能的取值范围之内。
模拟信号与数字信号的区别在于后者的取值通常只能属于预先确定的可能取值集合之内,例如在{0V, 5V}这一集合中取值。
F2833x介绍---ePWM
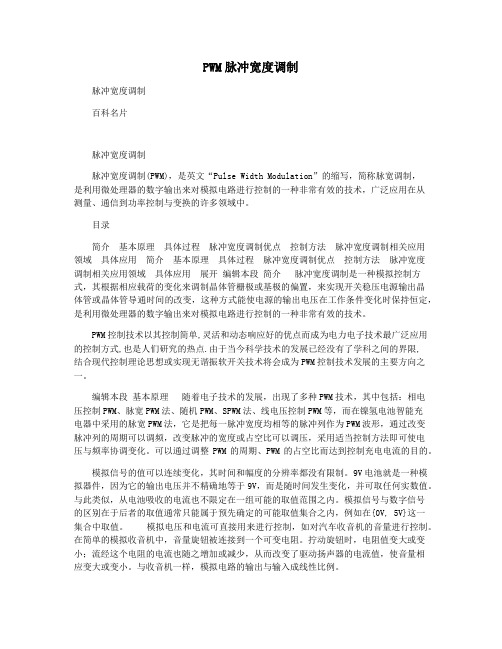
TI C2833x介绍---ePWM通常我们用的电压源型逆变器,是通过IGBT、MOSFET等开关管的切换,用单极性或者双极性的脉冲波形来模拟正弦波,如图所示:这里的基本原则是等面积,即冲量不变的原理。
在逆变器直流母线电压固定的情况下,脉冲波的幅值已经确定,使用改变占空比的方法,即对应改变输出基波的幅值。
最常用的载波PWM的基本原理,一般都是三角形载波和调制波波形,如正弦波、马鞍波等进行比较,在相交点产生开关状态的切换。
三角载波的频率一般在kHz基波,相当于时间域里的一个函数,一般用硬件电路来实现才能保证较好的精度和时域特性。
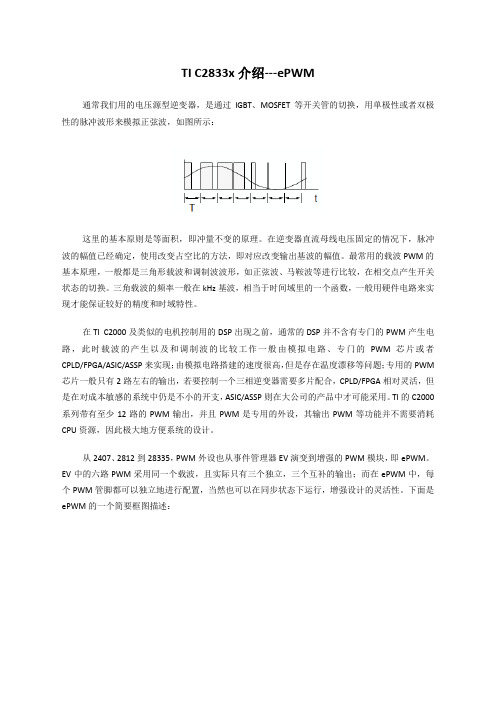
在TI C2000及类似的电机控制用的DSP出现之前,通常的DSP并不含有专门的PWM产生电路,此时载波的产生以及和调制波的比较工作一般由模拟电路、专门的PWM芯片或者CPLD/FPGA/ASIC/ASSP来实现;由模拟电路搭建的速度很高,但是存在温度漂移等问题;专用的PWM 芯片一般只有2路左右的输出,若要控制一个三相逆变器需要多片配合,CPLD/FPGA相对灵活,但是在对成本敏感的系统中仍是不小的开支,ASIC/ASSP则在大公司的产品中才可能采用。
TI的C2000系列带有至少12路的PWM输出,并且PWM是专用的外设,其输出PWM等功能并不需要消耗CPU资源,因此极大地方便系统的设计。
从2407、2812到28335,PWM外设也从事件管理器EV演变到增强的PWM模块,即ePWM。
EV中的六路PWM采用同一个载波,且实际只有三个独立,三个互补的输出;而在ePWM中,每个PWM管脚都可以独立地进行配置,当然也可以在同步状态下运行,增强设计的灵活性。
下面是ePWM的一个简要框图描述:就每个ePWM来说,可以分为以下十个主要的功能模块,其功能示意图如图1所示。
图1 ePWM功能示意1.时钟预定标:这个模块在28335大部分外设中都有,其输入是SYSCLKOUT,预定标的作用是对SYSCLKOUT时钟信号进行分频,从而控制外设的时钟频率。
脉宽调制pwm的原理与应用

脉宽调制(PWM)的原理与应用1. 脉宽调制(PWM)概述脉宽调制(PWM)是一种常用的调制技术,用于控制电子设备中的信号的占空比。
在PWM技术中,周期固定,而信号的脉宽可以根据需要调整。
这种技术可以模拟连续信号,并用于各种应用,如电机控制、光控制和通信系统等。
2. 脉宽调制(PWM)的工作原理脉宽调制(PWM)的工作原理基于占空比的调节来控制输出信号的平均功率。
PWM信号由两个元素组成:周期和脉宽。
周期是信号的总时间长度,脉宽表示信号在一个周期内处于高电平状态的时间长度。
通常情况下,PWM信号的周期是固定的,决定了信号的重复频率。
脉宽则是可调节的,可以通过改变脉宽来控制输出信号的占空比。
占空比是高电平存在的时间与一个周期的比例。
脉宽调制的基本原理是,在一个周期内改变信号的脉宽,来控制输出信号的平均功率。
当脉宽较小的时候,平均功率较低;当脉宽较大的时候,平均功率较高。
3. 脉宽调制(PWM)在电机控制中的应用脉宽调制(PWM)在电机控制中被广泛应用。
通过改变PWM信号的脉宽,可以调整电机的转速和扭矩输出。
3.1 电机转速控制脉宽调制(PWM)可以实现电机的转速控制。
通过改变PWM信号的脉宽,可以改变电机的输入电压,从而控制电机的转速。
较大的脉宽将产生较高的平均电压,从而使电机转速增加;较小的脉宽将产生较低的平均电压,从而使电机转速减小。
3.2 电机扭矩控制脉宽调制(PWM)还可以实现电机的扭矩控制。
通过改变PWM信号的脉宽,可以改变电机的平均电流,从而控制电机的输出扭矩。
较大的脉宽将产生较高的平均电流,从而使电机输出扭矩增加;较小的脉宽将产生较低的平均电流,从而使电机输出扭矩减小。
4. 脉宽调制(PWM)在光控制中的应用脉宽调制(PWM)在光控制中也有广泛的应用。
通过改变PWM信号的脉宽,可以控制LED灯的亮度。
4.1 LED亮度控制LED灯的亮度可以通过改变PWM信号的脉宽来控制。
较大的脉宽将使LED灯处于高亮度状态,而较小的脉宽将使LED灯处于低亮度状态。
epwm实验报告DSP

epwm实验报告DSPEPWM实验报告引言:EPWM(Enhanced Pulse Width Modulation)是一种增强型脉宽调制技术,广泛应用于数字信号处理(DSP)领域。
本实验报告将介绍EPWM的原理、应用以及实验结果。
一、EPWM原理1.1 脉宽调制技术脉宽调制技术是一种通过改变信号的脉冲宽度来实现信号调制的方法。
EPWM作为一种增强型的脉宽调制技术,可以更加精确地控制脉冲宽度,提高系统的稳定性和性能。
1.2 EPWM的工作原理EPWM通过将一个周期性的高频脉冲信号与一个低频调制信号进行比较,从而实现对输出信号的调制。
EPWM的关键在于调制信号的产生和脉冲信号的比较。
二、EPWM的应用2.1 电力电子领域EPWM广泛应用于电力电子领域,例如交流电调制、直流电调制等。
EPWM可以控制电力器件的开关时间,实现对电力系统的精确控制,提高系统的效率和稳定性。
2.2 无线通信领域EPWM也被广泛应用于无线通信领域,例如无线电调制、射频调制等。
EPWM可以调制无线信号的频率和幅度,实现对通信系统的灵活控制,提高通信质量和传输速率。
三、EPWM实验3.1 实验目的本实验旨在通过搭建EPWM系统,验证EPWM的工作原理,并观察其在不同应用场景下的性能表现。
3.2 实验步骤首先,搭建EPWM系统,包括脉冲信号发生器、调制信号发生器和比较器。
然后,将脉冲信号和调制信号输入比较器,观察输出信号的波形和频谱。
最后,改变调制信号的频率和幅度,观察输出信号的变化。
3.3 实验结果在实验中,我们观察到当调制信号的频率增加时,输出信号的脉冲宽度减小;当调制信号的幅度增加时,输出信号的脉冲宽度增加。
这验证了EPWM的工作原理。
四、EPWM的优缺点4.1 优点EPWM具有精确控制脉冲宽度的能力,可以实现高精度的信号调制。
同时,EPWM的应用范围广泛,可以满足不同领域的需求。
4.2 缺点EPWM的实现需要较复杂的电路和算法,对系统设计和调试的要求较高。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第6章DSP片上控制与采样外设6.1 增强型脉宽调制器(ePWM)6.1.1 ePWM模块概述•增强型脉冲宽度调制器(ePWM)•ePWM模块中每个完整的PWM通道都是由两个PWM输出组成,即ePWMxA和ePWMxB•有时为了能够更精确控制PWM输出,加入了硬件扩展模块—高精度脉冲宽度调制器(HRPWM)•当多个ePWM模块集成在一个器件内时,如图:每个ePWM模块都具有以下特征:●周期和频率可控的16位时间基准计数器。
●两个PWM输出(EPWMxA,EPWMxB),可以配置成以下工作方式:两个独立的带有单个边沿操作的PWM输出、两个独立的带有双边沿对称操作的PWM输出、一个独立的带有双边沿非对称操作的PWM输出。
●通过软件可实现PWM信号的异步越权控制。
●可编程的相位控制,以支持相对其它ePWM模块的相位滞后或超前操作。
●逐周期的硬件上相位同步。
●独立的上升沿和下降沿死区延时控制。
●可编程错误区域分配,用于故障时的逐周期控制和单次控制。
●所有事件都可以触发CPU中断以及ADC启动转换(SOC)。
●事件可预定标,减小CPU频繁响应中断的负担。
●循环周期性的硬件锁定(同步)相位关系。
●错误条件可强制PWM输出为高、低以及高阻状态。
●高频载波信号实现PWM斩波,对于脉冲变压器门极驱动非常有用。
ePWM子模块概述•ePWM模块主要包含以下7部分:时间基准子模块;计数比较子模块;动作限定子模块;死区控制子模块;PWM斩波子模块;错误区域控制子模块和事件触发子模块。
•每个ePWM模块都是由7个子模块组成,并且系统内通过信号进行连接,如图:ePWM模块内部结构如图:ePWM模块的主要信号模块如下:•PWM输出信号(ePWMxA和ePWMxB)•错误区域信号(TZ1-TZ6)•时间基准同步输入和输出信号•ADC启动信号•外设总线1. 时间基准子模块(TB)每个ePWM都有自己的时间基准模块,它用来决定ePWM 的事件时序。
通过同步逻辑信号,可以实现多个ePWM模块以相同时间基准进行工作。
图为ePWM模块的时间基准子模块的关系图。
(1)时间基准子模块的用途用户可以通过配置时间基准子模块实现以下功能:①指定ePWM时间基准计数器(TBCTR)的频率值或周期值以控制事件发生的频率。
②与其它ePWM模块的时间基准同步。
③维持与其它ePWM模块间的相位关系。
⑤设置时间基准计数器为增、减或增减计数模式。
⑥产生以下事件:●CTR=PRD:时间基准计数器值等于指定的周期值(TBCTR=TBPRD);●CTR=ZERO:时间基准计数器等于零(TBCTR = 0x0000)。
⑦配置时间基准的时钟率,即对CPU系统时钟(SYSCLKOUT)的预定标。
时间基准模块的关键信号和寄存器与时间基准子模块相关联的关键信号信号描述ePWMMxSYNCI 时间基准同步信号输入ePWMMxSYNCO 时间基准同步信号输出CTR=PRD 时间基准计数器等于指定周期CTR=Zero时间基准计数器等于零CTR=CMPB 时间基准计数器等于计数寄存器CTR_dir时间基准计数方向CTR_max时间基准计数器等于最大值TBCLK时间基准时钟计数PWM周期与频率时间基准周期寄存器(TBPRD)和时间基准计数器共同控制PWM的频率,当TBPRD=4时周期和频率与计数器递增、递减以及递增递减时的关系。
系统时钟(SYSCLKOUT)的预定标处理将得到时间基准时钟(TBCLK),由该时钟决定每次时间递增的步骤。
时间基准计数器有三种操作模式,可通过时间基准计数寄存器(TBCTL)选择:(1)递增计数模块时间基准计数器从周期值,当达到周期值,时间基准计数器复位置零,此时再重新开始递增计数,重复运行。
(2)递减计数模式时间基准计数器从周期值递减到零,当达到零值时,时间基准计数器重置周期值,此时再重新递减重复运行。
(3)递增递减计数模式时间基准计数器从零递增到周期值,当达到周期值,时间基准计数器开始递减直至零,此时再递增重复运行。
时间基准周期映射寄存器(1)当前工作寄存器(active register)。
(2)映射寄存器(shadow register)。
(3)时间基准周期映射模式。
(4)时间基准周期立即装载模式。
6.1.2 ePWM子模块功能2.计数比较子模块计数比较子模块将时间基准计数器的计数值不断地同计数比较器A(CMPA)和计数比较器B(CMPB)寄存器做比较,当时间基准计数器等于其中一个比较寄存器的值时,计数比较单元产生相应的事件。
①使用可编程的CMPA和CMPB寄存器产生相应比较事件:CTR=CMPA,时间基准计数器等于计数比较寄存器A (TBCTR=CMPA)。
CTR=CMPB,时间基准计数器等于计数比较寄存器B (TBCTR=CMPB)。
②若对动作限定子模块进行了相关配置,可控制PWM的占空比。
③映射新的比较值,防止在当前的PWM周期中产生冲突。
计数比较子模块基本结构1.计数比较子模块的应用(1)两位独立的比较事件CTR=CMPA:时间基准计数器等于有效计数比较器A的值CTR=CMPB:时间基准计数器等于有效计数比较器B的值(2)两种工作模式映射模式立即装载模式2.计数模式时序波形计数比较子模块产生比较事件有以下三种模式:•增计数模式:用于产生不对称的PWM脉冲波形。
•减计数模式:用于产生不对称的PWM脉冲波形。
•增减计数模式:用于产生对称的PWM脉冲波形。
动作限定子模块在PWM波形的产生中具有最重要的作用。
它决定哪些事件可产生相关类型的动作,从而使EPWMxA和EPWMxB输出要求的波形。
动作限定子模块(Action-qualifier)与其它模块的连接关系同图所示。
•基于以下事件限制并产生相应操作•当事件发生时,管理产生事件的极性•当时间基准计数器递增或递减计数时,提供事件的独立控制。
•如图:动作限定子模块输入输出信号。
动作限定子模块的应用ePWMxA和ePWMxB输出的几种操作方式①置高:设置EPWMxA或EPWMxB输出为高电平。
②置低:设置EPWMxA或EPWMxB输出为低电平。
③取反:如果当前EPWMxA或EPWMxB输出被拉高,则将其拉低;如果当前EPWMxA和EPWMxB输出被拉低,则将其拉高。
④无动作:保持输出EPWMxA和EPWMxB为当前设置状态。
尽管无动作操作不会改变EPWMxA和EPWMxB的输出,但相应事件仍可以触发中断和ADC开始转换。
EPWMxA和EPWMxB的输出动作可以独立配置,任何事件都可以对给定的输出引脚进行动作控制。
例如,CTR=CMPA和CTR=CMPB都可以对EPWMxA输出进行控制。
所有的限定操作可以由控制寄存器进行配置。
动作限定子模块动作限定事件优先级ePWM动作限定器有可能在同一时间接收多个事件,在这种情况下,通过硬件来分配事件的优先级。
一般规则是发生较晚的事件有较高的优先级,由软件强制发生的事件总是具有最高的优先级。
优先级别为1的是最高优先级。
TBCTR计数方向的不同会带来优先级的细微变化。
●递增递减模式下动作限定事件优先级●递增模式下动作限定事件优先级●递减模式下动作限定事件优先级ePWM死区子模块的结构如图该模块的主要功能:•对单个EPWMx输入信号(死区子模块的输入信号)产生带有死区的信号对(EPWMxA和EPWMxB)。
•对信号对进行高有效(AH)、低有效(AL)、互补高有效(AHC)、互补低有效(ALC)配置。
•为上升沿增加可编程延迟(RED)。
•为下降沿增加可编程延迟(FED)。
•信号通道可以完全被旁路。
死区子模块的操作方法死区子模块有两组独立的可选择方式,如图所示。
这两组独立的可选择方式可以对输入信号源、输出模式及极性进行相应配置。
①输入源选择。
可以通过DBCTL寄存器的IN_MODE位来选择每个上升沿延迟或下降沿延迟的信号源,有如下几种模式: EPWMxA In用作下降沿和上升沿延迟的信号源,此操作为默认模式;EPWMxA In用作下降沿延迟的信号源,EPWMxB In用作上升沿延迟的信号源;EPWMxA In用作上升沿延迟的信号源,EPWMxB In用作下降沿延迟的信号源;EPWMxB In用作下降沿和上升沿延迟的信号源。
②输出模式控制。
由DBCTL[OUT_MODE]位来控制输出模式,这些位可配置上升沿延迟输出、下降沿延迟输出、二者均作为或二者均不作为死区子模块的输出。
③极性控制。
极性控制(DBCTL[POLSEL])位可以配置上升沿延迟、下降沿延迟信号在输出前是否进行翻转。
PWM斩波器子模块可以通过动作限定和死区控制子模块产生高频PWM斩波,在使用PWM控制功率开关中此功能很重要。
1、PWM斩波器子模块主要功能如下:1).可编程斩波频率。
2).可编程第一个斩波脉冲的脉冲宽度。
3).可编程第二个或其他脉冲的占空比。
4).不必要时则完全可以不使用此功能。
2、PWM斩波器的操作和输出波形如图给出PWM斩波器子模块具体操作结构,SYSCLKOUT分频提供该模块时钟,频率和占空比由PCCTL寄存器的CHPFREQ 位与CHPDUTY位控制。
3、单次触发脉冲首脉冲的宽度可配置为16种值,首脉冲的宽度或周期通过公式(6-1)计算:T1stpulse = TSYSCLKOUT×8×OSHTWTH (6-1)这里的TSYSCLKOUT是系统时钟周期,OSHTWTH是4位寄存器值,取值范围为1~16。
4、占空比控制脉冲变压器门极驱动的设计需要考虑到变压器和相关电路的特性。
饱和性就是其中一个需要考虑的因素。
为了满足门极驱动设计要求,第二个和随后脉冲的占空比可通过编程设置。
在功率开关导通的期间内,这些持续脉冲确保了合适的驱动能力和极性,并且可以通过软件设置脉冲的占空比和极性。
图6-23是通过设置CHPDUTY位实现占空比控制的时序图,可选择的占空比范围是12.5%~87.5%。
如图给出了错误控制子模块的结构框图。
每个ePWM模块都与6个TZn错误控制信号相连,这些错误控制信号与GPIO口复用。
当这些信号呈现出外部错误或触发条件时,ePWM输出可以设置为相应的工作方式,来响应错误信号的发生。
1、错误控制子模块主要功能①错误输入TZ1 ~ TZ6可映射到任何一个ePWM模块。
②当错误条件发生时,EPWMxA和EPWMxB的输出可以强制为高电平、低电平、高阻态或不动作。
③对于严重的短路或者过流的情况支持单次触发错误(OSHT)。
④支持当前限定操作的周期性触发。
⑤每个错误区输入引脚可以分配为单次触发或者逐周期触发操作。
⑥任何一个错误区引脚都可产生中断。
⑦支持软件强制触发。
⑧如不需要,错误控制子模块可以完全禁用。
错误控制子模块(TZ)2、错误控制子模块的操作方式错误区~TZ1 ~ TZ6引脚信号是低有效,当这些引脚是低电平时,就表示该引脚有错误事件发生。