编码器的使用和电池的连接
GST-BMQ-2电子编码器
海湾电子编码器安装使用说明书一、概述GST-BMQ-2电子编码器(以下简称编码器)可对电子编码的探测器或模块进行地址码、灵敏度、设备类型等的读出和地址码、灵敏度的写入功能,还可以对火灾显示盘进行地址码、灯号及二次码的读出和写入。
二、特点1. 该编码器采用手握式结构,外形小巧,携带方便,操作简单;2. 该编码器可通过编码器后盖的总线接口,直接和总线型探测器旋接,进行编码等操作,更加方便,如图2所示(略);3. 可对公司生产的总线型探测器、模块等设备编码,可对ZF-GST8903火灾显示盘、JTY-HM-GST102线型光束感烟火灾探测器、JTY-HF-GST102线型光束感烟火灾探测器、隔爆点型可燃气体探测器等I²C接口设备编码;4. 四位段码式液晶显示,显示直观;5. 低功耗睡眠和自动关机功能;6. 电池欠压指示功能三、技术特性1. 电源:1节9V叠式电池2. 工作电流≤8mA3. 待机电流≤100чA4. 使用环境:温度:-10℃~+50℃相对湿度≤95%,不凝露5. 尺寸:164mm×64mm×37mm四、结构特征外形示意图如图1所示(略)1:电源开关 2:液晶屏3:总线插口 4:火灾显示盘接口(I²C)5:复位键 6:固定螺丝7:电池盒后盖 8:铭牌9:JTY-GD-G3、JTY-ZCD-G3N探测器总线接口10:JTY-GM-GST9611、JTW-ZOM-GST9612型探测器总线接口11:电池盒后盖螺丝 12:保护盖其中各部分名称和功能说明如下:1. 电源开关:完成系统硬件开机和关机操作。
2. 液晶屏:显示有关探测器的一切信息和操作人员输入的相关信息,并且当电源欠压时给出指示。
3. 总线插口:编码器通过总线插口与探测器或模块相连。
4. 火灾显示盘接口(I²C):编码器通过此接口与ZF-GST8903火灾显示盘或以I²C编程方式编码的探测器相连。
海湾编码器说明书

海湾编码器说明书189******** 海湾电⼦编码器安装使⽤说明书⼀、概述GST-BMQ-2电⼦编码器(以下简称编码器)可对电⼦编码的探测器或模块进⾏地址码、灵敏度、设备类型等的读出和地址码、灵敏度的写⼊功能,还可以对⽕灾显⽰盘进⾏地址码、灯号及⼆次码的读出和写⼊。
⼆、特点1. 该编码器采⽤⼿握式结构,外形⼩巧,携带⽅便,操作简单;2. 该编码器可通过编码器后盖的总线接⼝,直接和总线型探测器旋接,进⾏编码等操作,更加⽅便,如图2所⽰(略);3. 可对公司⽣产的总线型探测器、模块等设备编码,可对ZF-GST8903⽕灾显⽰盘、JTY-HM-GST102线型光束感烟⽕灾探测器、JTY-HF-GST102线型光束感烟⽕灾探测器、隔爆点型可燃⽓体探测器等I2C接⼝设备编码;4. 四位段码式液晶显⽰,显⽰直观;5. 低功耗睡眠和⾃动关机功能;6. 电池⽋压指⽰功能三、技术特性1. 电源:1节9V叠式电池2. ⼯作电流≤8mA3. 待机电流≤100чA4. 使⽤环境:温度:-10℃~+50℃相对湿度≤95%,不凝露5. 尺⼨:164mm×64mm×37m m四、结构特征外形⽰意图如图1所⽰(略)1:电源开关 2:液晶屏3:总线插⼝ 4:⽕灾显⽰盘接⼝(I2C)5:复位键 6:固定螺丝7:电池盒后盖 8:铭牌9:JTY-GD-G3、JTY-ZCD-G3N探测器总线接⼝10:JTY-GM-GST9611、JTW-ZOM-GST9612型探测器总线接⼝11:电池盒后盖螺丝 12:保护盖其中各部分名称和功能说明如下:1. 电源开关:完成系统硬件开机和关机操作。
2. 液晶屏:显⽰有关探测器的⼀切信息和操作⼈员输⼊的相关信息,并且当电源⽋压时给出指⽰。
3. 总线插⼝:编码器通过总线插⼝与探测器或模块相连。
4. ⽕灾显⽰盘接⼝(I2C):编码器通过此接⼝与ZF-GST8903⽕灾显⽰盘或以I2C编程⽅式编码的探测器相连。
松下伺服A6系列编码器接线定义知识分享

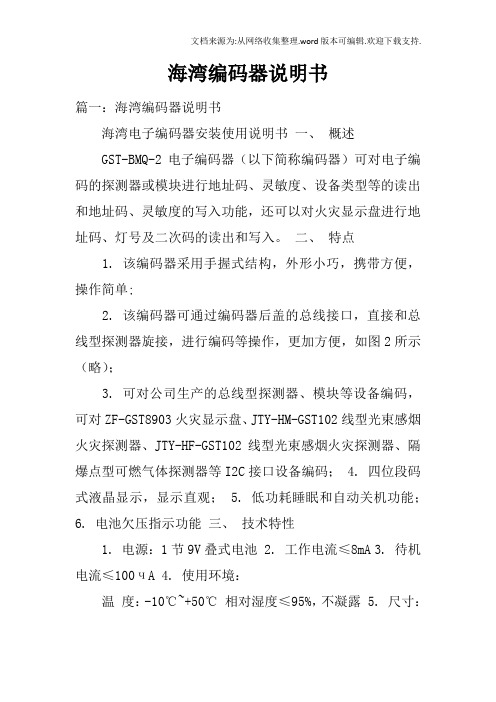
松下伺服A6系列编码器接线定义目前国内市场上松下 A6系列伺服电机已成为主流,相对 A52系列伺服电机,松下 A6系列伺服在性 能上有所提升,并且搭载了 A5II 系列中广受好评的2自由度控制方式,可简单进行设定及调整;新开发 输出范围50W-5.0KW 多种类电机,采用23bit 绝对式编码器,实现高分辨率,可进行更高精度的定位、 机械驱动。
A6系列伺服电机最大的特点就是电机采用 23位绝对式编码器,用户可根据自身需要自行选择用作增量式编码器或绝对式编码器,两者为同一款电机,用作绝对式编码器时加一个电池及电池盒即可,相对 A52系列价格及货期均有明显优势。
现A6系列编码器连接图如下, X6接口:1、将23bit 绝对式编码器作为绝对式系统使用时:•MSMF 5OW^1QQOW »MHMF SOW^IOQOW <MQMF 100W^4(K)W 《3$fit 番®史凯\谓割必便弁避要点窦弟的螺口」盘鱼导致幡杖,•场不财遍中盟❷跚的毒—NW 的堂・财旧我做■索*壬:FAF 物安芸垫基刊不德模娜知堤IPELE5廿EW玉攫整 JN6CR07PWI2JN6CRD7R^4切 Japan Aviaton t e-ctrcnics 1巨蜜嚣 JN£FR07Sr.<l ,,, ^ * 连摘香:3E2Q&0100KV IbrJwWviEbAunal 卦史套< 3E3O6-3MaDM............... ci "'VJ -niBAI十BAT - PS+卯一比J 虱北 IGfrZZJOKV!X 6E5VEOV(E应使坦多IB 茨第时♦ MSMF 50 W- 1 OOO W ♦VFbIMF 50W-1OOOW ♦MQMF 10QW —40OW 《导线曜》■ B* 黑给 ES V EO V …纺 _l 1*1弓牛I ':切 lyco Ltectromcs Am-g®机 BAT+ BAT- ~PS~ PSiG 1_如 u 3 4¥ 5 & X6---- 十6 V 洌1 EOV 外洗吃(FG)P5C OW ; 3E206^010& KV 外专 3E33&32OC^0C-a 172161-1 r 知nmiw 珈!)诚/ 当 iri (by Tyco Lytrgg ^am 1申埋嗜城•M$MF 1.0 kW-5,0kW •MDMF 1.0 kW-5.0 KW •MHMF 1.0 kW-5.0 KW •MGMF Q3S kW-4.4 kWov fiMi : 3E10&2230KV i r iiH--rrrmn 膊勺口 =■ ■:. nn EOT 厂浦 n 为JN2A810M351M 浆|H ⑷门乌⑴… BAT 十毛芥 ps w F GI (6J 5一⑤ K (3J [7] & 」血 ]PS wJLlOEAtO-ZgS JIS2DS10SLI-F.JL10-?E2O2^P JN2AS10ML3-R[ty 」;丈时 st on : isdlKE//! \ (t-y Ji pa ," A via I 5f ・=^rdlfll : & )在率表-aEMrOiod KV -:3E306r3£OGrO'3B jTumrn 二 _:k" 一就巴:■,壬延l 分色嗟(FGJ 舔岳:3etO&2^30 KV fSuntuno 3M>或带土 品嫩柝程神2、将23bit 绝对式编码器作为增量式系统使用时: ■■■不使廉第直K.WC 时• MSMF 50W^1000W #MHMF 5DW-TOOOW eviQMF 1OOW —4OOW 型} _浅劳色 产 k 堞色...… 二一 A 打 f m F 尸 』 a ::; 「 al1 1 1 ■ -1 "i ri■ <i ■ ■ Fa4 S . : : i 广 63 riE /Fr v EO V 逐果黑花20&0100KV 172161-1 JW6春律;3E3Q€T29CH)Q3 ;b/ Tyco Etectronics -aiier)iSurratomo询ftE 主 EO VPS* 11祢 "flllP 172)69-1 布虹 ・HV Tyco E *T£tro<iKS Jiprn ;骸哇% 3E106-223G iSutrwtM^申就电埔♦MSMF &OW-1000W »MHMF 50 W-1000 W *MQMF 100 网〜400 W (连聊SD立* JK6CR37PIVZ i 在匿费JN6FR07SMSJM5CR0 7PM4 ! Ow」w EfeArnr& !IN』B■时n &w,tion Eh c!*orrp«4 ] I 卉那S: 3E20&BOOKV 奔能:3F1O6-223OKVS33担LMdEfa 3U] trf怕当品遵搂器规格•电机■述雁at安笑螺叮WZ)谓用DIADZ N,E的博炬M"此外,”移通用制I■朗稍的尊7,心导蒙破乱■Tt* tt M坛中堡主凹.牺的整釜就利厦伊埋卜卷.震牌上通匚羿•&参. &乘it谒交芸笠凰刑不能宝泣整扩等级旧&孔w京有*r -----【电帕偶*峦器PINS1承匣:•MSMF 1 0 KW-5,0 kW ・MHMF ] .0 kW-5.0 kW •MDMF 1.0kW-^5,0 kW ♦MGMF 0.85 kW-4,4 kWE5V EO V G⑴T*! 4,■ i114・4r1K E).」:1;_ 5L⑺;[/ 6J (9) T木晦茎:捉*flHt«:3E3O6-3Z(XMXJ0(Su<TKtMn& MMNtt;—-.*r>12AS?C^3J=?F\1--H仲,・_______________________________ E57EOVPSJI 10^E 找H9F JMZA.S1CML^R t)Jf」•♦*「. d: ,.n「;= .Ih oicj JL1O6A20-29SJN2DS10SL1-R;hv JtMr A%iflt'on Fk '* --. £» I排播藉:眼223QKVfSbmit^mo 叫g"哥■ ■*! * 1*■iCW1'。
安川机器人编码器电池更换要领(多图详解)

安川机器⼈编码器电池更换要领(多图详解)安川机器⼈电池的检查:安川机器⼈DX200内有系统⽤的电池,⽤于备份⽤户程序中的重要⽂件数据(CMOS存储器)。
电池耗尽,到了更换时期后,⽰教编程器的画⾯中会显⽰“存储器电池已耗尽”。
请确认有⽆出现此信息。
更换零部件的前期准备:1:机器⼈回到第⼆原点位置,预防更换电池原点丢失。
2:关掉DX200控制柜电源3:维护、保养及配线作业务必在断电标识(「禁⽌通电」等)后进⾏,防⽌有触电、受伤的危险。
4:准备好更换的新电池,按说明书上型号购买原装电池安川机器⼈更换步骤:1:摘下底座插座上⼩盖板的螺钉2:取下底座插座的盖板,把电池组拉出到能更换的位置,拉出时注意不要挂住内部导线。
3:把电池组从托架上取下。
4:把新电池组插在基板上的空插座上。
5:把旧电池组从基板上取下,为防⽌编码器数据丢失,请务必在接上新电池组后取下。
6:把新电池组安装在托架上。
7:⽤螺钉把底座插座的盖板安装好,作业结束。
8:安装底座插座的盖板时注意不要压断电缆,如果更换电池后原点丢失,我们可以做原点校准。
安川机器⼈原点什么是机器⼈原点?安川机器⼈的说明书中有这样⼀句话:原点位置校准是将“机器⼈位置”与“编码器位置”进⾏对照确认。
各⼤品牌机器⼈都有所谓的原点标记,也就是在本体上各轴或者关节处能看到的标识点,安川的⼤部分机器⼈是红⾊箭头加刻度线。
安川机器⼈有个菜单,叫做“当前位置”,此菜单下调整显⽰“脉冲值”,当脉冲值调整为“0”时,若“原点标记位置”⽆偏移则机器⼈原点⽆问题。
原点:是机器⼈⼀切动作的基准点!机器⼈出⼚时已校准过原点位置校准,但下列情况需要再次校准原点位置:更换机器⼈和控制柜(DX200)的组合时;更换电机或者编码器时;内存被删除时,(更换内存基板、本体编码器电池耗尽、控制柜内存储电池耗尽等);机器⼈与⼯件发⽣碰撞导致原点位置偏离时甚⾄产⽣轻微形变。
原点丢失有两种情况:A、丢失个别轴的原点B、丢失所有轴原点全部轴同时创建:更换机器⼈和控制柜的组合时,全部轴同时登录原点位置。
安川SGMJV,SGMGV编码器与CDHD接线定义

测试安川电机样机:
1、电机型号:SGMJV-02A3(带20位编码器)。
2、编码器接线:
电机侧自带的连接器,它直接插入驱动器的反馈输入接口。
它是公头,针脚定义如下图截图所示:
电机侧编码器针脚定义如下图所示:“伺服单元侧”即上述公头,
母头的针脚定义及其延长线接线如下图示:
最终接线表:
功能 CDHD C4(26针) 线色 上述母头(6针) Data+ 1 棕 5 Data- 14 黑 6 5 VDC 11 紫 1 0 VDC
24
蓝
2
3、 电机规格:规格书上未提供电感、电阻、极数等信息。
实测电阻约为7.7 Ohm 。
通
过ZERO 1模式,读取极数为6。
2014-10-11补记:安川电机编码器与SERVOTRONIX CDHD 驱动器的连接
SERVOTRONIX CDHD 驱动器 安川电机编码器
信号名 C4接口(26针) 信号名 6针molex 连接器 Data+ 1 PS 5 Data- 14 /PS 6 5 VDC 11 PG 5V 1 0 VDC 24
PG 0V 2 电池正极 无(编码器直接接到电池)
BAT(+)
3
电池负极 无(编码器直接接到电池) BAT(-)
4
屏蔽
26
FG
壳体
20141029
1、安川SGMGV 马达编码器与CDHD 驱动器接线定义
最终接线表:
功能 CDHD C4(26针) 安川SGMGV 马达编码器(10针) Data+ 1 1 Data- 14 2 5 VDC 11 4 0 VDC
24
9
1
2 4 6
3 5
紫 红 棕
黑
黑 蓝。
海湾编码器说明书
海湾编码器说明书篇一:海湾编码器说明书海湾电子编码器安装使用说明书一、概述GST-BMQ-2电子编码器(以下简称编码器)可对电子编码的探测器或模块进行地址码、灵敏度、设备类型等的读出和地址码、灵敏度的写入功能,还可以对火灾显示盘进行地址码、灯号及二次码的读出和写入。
二、特点1. 该编码器采用手握式结构,外形小巧,携带方便,操作简单;2. 该编码器可通过编码器后盖的总线接口,直接和总线型探测器旋接,进行编码等操作,更加方便,如图2所示(略);3. 可对公司生产的总线型探测器、模块等设备编码,可对ZF-GST8903火灾显示盘、JTY-HM-GST102线型光束感烟火灾探测器、JTY-HF-GST102线型光束感烟火灾探测器、隔爆点型可燃气体探测器等I2C接口设备编码;4. 四位段码式液晶显示,显示直观;5. 低功耗睡眠和自动关机功能;6. 电池欠压指示功能三、技术特性1. 电源:1节9V叠式电池2. 工作电流≤8mA3. 待机电流≤100чA4. 使用环境:温度:-10℃~+50℃相对湿度≤95%,不凝露 5. 尺寸:164mm×64mm×37mm 四、结构特征外形示意图如图1所示(略) 1:电源开关 2:液晶屏3:总线插口 4:火灾显示盘接口(I2C) 5:复位键6:固定螺丝 7:电池盒后盖 8:铭牌9:JTY-GD-G3、JTY-ZCD-G3N探测器总线接口10:JTY-GM-GST9611、JTW-ZOM-GST9612型探测器总线接口 11:电池盒后盖螺丝12:保护盖其中各部分名称和功能说明如下:1. 电源开关:完成系统硬件开机和关机操作。
2. 液晶屏:显示有关探测器的一切信息和操作人员输入的相关信息,并且当电源欠压时给出指示。
3. 总线插口:编码器通过总线插口与探测器或模块相连。
4. 火灾显示盘接口(I2C):编码器通过此接口与ZF-GST8903火灾显示盘或以I2C编程方式编码的探测器相连。
OMRON编码器说明书
᪡㆛
Ⳍֵ݇ᙃ
串行传送
对应同时输出多位数据的通常并联传送,可采用由一个 传送线进行系列化输出数据的形式,目的是节省连线, 在接受信号侧则变换成并联信号后使用。
⬉ܝӴᛳ఼
ԡ鼠Ӵᛳ఼
⌟䭓Ӵᛳ఼
㾚㾝Ӵᛳ఼ ᅝܼऎඳ Ӵᛳ఼ 䖥Ӵᛳ఼ ᖂൟ⬉ܝ Ӵᛳ఼ ᮟ䕀ᓣ 㓪ⷕ఼ 䍙ໄ⊶ Ӵᛳ఼ य़Ӵᛳ఼
1 增量式或绝对式
考虑到容许的成本,电源接通时的原点可否恢复、控 制速度、耐干扰性等,选择合适的类型。
2 分解率精度的选择
在考虑组装机械装置的要求精度和机械的成本的基础 上,选择最适合的产品。一般选择机械综合精度的1/2 ~1/4精度的分辨率。
3 外形尺寸
选定时还要考虑安装空间与选定轴的形态 (中空轴、 杆轴类)。
18位置,则代码的范围为从14位置到49位置。从49 ᡔᴃᣛफ
位置切换到14位置时,只改变1位,可见保持了格雷
码的性质。通过将该代码转换至14位置,就能转换
至从0位置开始的代码,然后进行使用。
(4) BCD代码
ᡔᴃ㆛
二进10进制代码 (Binary Coded Decimal Code)。
是分别用2进符号表示10进制各位的代码。
Ӵᛳ఼ 䖥Ӵᛳ఼
ᖂൟ⬉ܝ Ӵᛳ఼ ᮟ䕀ᓣ 㓪ⷕ఼ 䍙ໄ⊶ Ӵᛳ఼
य़Ӵᛳ఼
项目
特长
构造
输出波形
·本 型 号 能 根 据 轴 的 旋 转 位 移 量,
输出脉冲列。
其方式是通过其他计数器,计算输
ফܗܝӊ AⳌ⣁㓱 BⳌ⣁㓱
出脉冲数,通过计数检测旋转量。
·希望知道某输入轴位置的旋转量, 先按基准位置,使计数位的计数 值复位,然后再用计数器把由该 䕈 位置发出的脉冲数累加起来。
海湾电子编码器使用说明书
海湾电子编码器使用说明书The manuscript was revised on the evening of 2021海湾电子编码器安装使用说明书一、概述GST-BMQ-2电子编码器(以下简称编码器)可对电子编码的探测器或模块进行地址码、灵敏度、设备类型等的读出和地址码、灵敏度的写入功能,还可以对火灾显示盘进行地址码、灯号及二次码的读出和写入。
二、特点1. 该编码器采用手握式结构,外形小巧,携带方便,操作简单;2. 该编码器可通过编码器后盖的总线接口,直接和总线型探测器旋接,进行编码等操作,更加方便,如图2所示(略);3. 可对公司生产的总线型探测器、模块等设备编码,可对ZF-GST8903火灾显示盘、JTY-HM-GST102线型光束感烟火灾探测器、JTY-HF-GST102线型光束感烟火灾探测器、隔爆点型可燃气体探测器等I2C接口设备编码;4. 四位段码式液晶显示,显示直观;5. 低功耗睡眠和自动关机功能;6. 电池欠压指示功能三、技术特性1. 电源:1节9V叠式电池2. 工作电流≤8mA3. 待机电流≤100чA4. 使用环境:温度:-10℃~+50℃相对湿度≤95%,不凝露5. 尺寸:164mm×64mm×37mm四、结构特征外形示意图如图1所示(略)1:电源开关 2:液晶屏3:总线插口 4:火灾显示盘接口(I2C)5:复位键 6:固定螺丝7:电池盒后盖 8:铭牌9:JTY-GD-G3、JTY-ZCD-G3N探测器总线接口10:JTY-GM-GST9611、JTW-ZOM-GST9612型探测器总线接口11:电池盒后盖螺丝 12:保护盖其中各部分名称和功能说明如下:1. 电源开关:完成系统硬件开机和关机操作。
2. 液晶屏:显示有关探测器的一切信息和操作人员输入的相关信息,并且当电源欠压时给出指示。
3. 总线插口:编码器通过总线插口与探测器或模块相连。
4. 火灾显示盘接口(I2C):编码器通过此接口与ZF-GST8903火灾显示盘或以I2C编程方式编码的探测器相连。
连接说明书
第一章硬件连接1.总体框图硬件连接完成以后,系统第一次上电,首先需要核对配置参数。
在系统参数中找到设备配置中对应的X/Z轴驱动同组设备号和IO模块的的设备号,并一一对应。
1. UPS 开关电源UPS 开关电源(HPW-145U)是 HNC-8 系列数控系统所需的开关电源,该开关电源具有掉电检测及 UPS 功能。
共有 6 路额定输出电压 DC +24V ,总额定输出电流 6A ,额定功率 145W ,具有短路保护、过流保护,UPS 开关电源给IPC 单元、数控装置等提供电源。
UPS 开关电源接口示意图及定义 J2 、J3:DC +24V 输出端口 J4J5:带UPS 功能的DC +24V 输出端口380v 的交流电经过控制变压器,后变为220V 交流电。
经过空气开关QF3和继电器KA2后给UPS 供电。
因为UPS 开关电源具有掉电检测和不间断供电的功能, 能够给系统提供稳定的电源,所以输出端要接在J4或J5中 +24VUPS 的位置。
UPS 由蓄电池,变频器,逆变器以及接点接触开关组成。
电源 首先通过逆变器变成直流,储存到蓄电池内,然后 。
通过变频器变成交流,输出。
其中,一旦输入电源停电,只要蓄电池电量够大,就一直可以供电。
复电后,马上对蓄电池充电,直到蓄电池满。
UPS输出 :用DC +24V 给IPC 单元、数控装置等提供电源2.IPC 单元IPC 单元是 HNC-8 系列数控装置的核心控制单元,相当于网络中的服务器,接口如图 2.2.4 所示。
POWER :24V 电源接口;接HPW-145U 带UPS 的DC 24V,保证系统在异常掉电后,保证设备的运行状态。
ID SEL :设备号选择开关; PORT0 ~ 3:NCUC 总线接口; USB0:外部 USB1.1 接口;RS232:内部使用的串口;VGA:内部使用的视频信号口,VGA接口就是显卡上输出模拟信号的接口,也叫D-Sub 接口。
松下伺服A6系列编码器接线定义知识分享
松下伺服A6系列编码器接线定义
目前国内市场上松下A6系列伺服电机已成为主流,相对A52系列伺服电机,松下A6系列伺服在性能上有所提升,并且搭载了A5II系列中广受好评的2自由度控制方式,可简单进行设定及调整;新开发输出范围50W~5.0KW多种类电机,采用23bit绝对式编码器,实现高分辨率,可进行更高精度的定位、机械驱动。
A6系列伺服电机最大的特点就是电机采用23位绝对式编码器,用户可根据自身需要自行选择用作增量式编码器或绝对式编码器,两者为同一款电机,用作绝对式编码器时加一个电池及电池盒即可,相对A52系列价格及货期均有明显优势。
现A6系列编码器连接图如下,X6接口:
1、将23bit绝对式编码器作为绝对式系统使用时:
2、将23bit绝对式编码器作为增量式系统使用时:。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
如果整个电池都已经发烫了就要停止,灯电池冷了再接着焊接。
华科瑞萨淘宝店地址:/
华中科技大学智能车队
序上不实现倍频也是可以满足需求的了。 定时器 RA 还有一个特点是它是递减计数的,所以预定标器和计数器的溢出都是向下溢
出的。再者当定时器 RA 用作编码器计数的时候,只需要将预定标器和计数器的值都设为 0xff, 就可以将预定标器作为计数的低八位来用,而计数器则作为计数器的高八位,从而实现类似 于 16 位计数器的功能。
现在的问题就是如何计算出在采样时间周期 T 内的正方波数。 编码器计数一般是使用输入捕捉模式(Input Capture Mode),但是也可以使用事件计数 模式(Event Counter Mode),只是后者无法实现程序上的倍频,而前者则可以。 由于六路 PWM 输出占用了一些具有输入捕捉模式的定时器(RC,RD,RG),剩下的具 有输入捕捉模式的空闲的定时器就只有 RF 了,但是出于某种考虑(现在也找不清楚到底是 什么原因了,可能是走线的问题,因为定时器 RF 的输入引脚只有一个 P8_3,而 RA 则有四 个引脚可以选择),我们没有选择 RF,而是选择了 RA,定时器 RA 是没有输入捕捉模式的, 但是其具有的事件计数模式功能也可以实现编码器的计数功能。 看 R8C 芯片资料:
华科瑞萨淘宝店地址:/
程序说明: 前面已经提到过,Timer RA 有一个八位的预定标器和一个八位的计数器。由于已经将预 定标器的初始值设为了 0xff,所以可以将预定标器作为计数器的低八位来用。程序的前面四 句就是用来将预定标器的数值和计数器的数值合并为一个 16 位的二进制数。 由于 Timer RA 是递减计数的,所以用上次的计数值减去这次的计数值就可以算出一个 正的计数的差值(第五句)。将每次计算的差值加起来就可以得出总共的计数值(第六句)。 第七句是用来记录这次的计数值,也就是下次取样的时候的上次的计数值。 第八句是用来计算总距离的。计算公式如下:
增量式光电编码器主要由光源、码盘、检测光栅、光电检测器件和转换电路组成,如图 1-1 所示。码盘上刻有节距相等的辐射状透光缝隙,相邻两个透光缝隙之间代表一个增量周 期;检测光栅上刻有 A、B 两组与码盘相对应的透光缝隙,用以通过或阻挡光源和光电检 测器件之间的光线。它们的节距和码盘上的节距相等,并且两组透光缝隙错开 1/4 节距, 使得光电检测器件输出的信号在相位上相差 90°电度角。当码盘随着被测转轴转动时,检 测光栅不动,光线透过码盘和检测光栅上的透过缝隙照射到光电检测器件上,光电检测器件 就输出两组相位相差 90°电度角的近似于正弦波的电信号,电信号经过转换电路的信号处 理,可以得到被测轴的转角或速度信息。
华中科技大学智能车队
我们程序中的 gl_ulTotalDistance(总距离)和 gl_iCurSpeed(当前速度)分别以 cm 和 cm/s 为单位的,我们的编码器用的是 200 线的,编码轮的周长约为 40mm,所以程序中的 计算公式会如上所示(可以计算验证一下)。
1.3. 编码器电路:
理解了以上编码器的原理后,就可以知道编码器的电路实际上是非常简单的,只需要把 编码器的输出波形接到单片机相应的 IO 口就行了。
void InitTimerRA (void)
{
/* Stop the RA timer */
tstart_tracr = 0;
while (tcstf_tracr == 1)
{ /* Wait for Timer RA to stop */
}
/* Disable RA interrupt */ traic = 0;
/* Initialize RA's registers */ tstop_tracr = 1; tracr = 0;
华中科技大学智能车队
/* Choose the p1_7 as The Event Count Input */ traiosel0 = 1; traiosel1 = 0; traiosel2 = 0;
/* Disable the TimerRA Interrupt by TRCIC */ traic = 0x00;
/* Start the RA timer */
tstart_tracr = 1;
}
/* ----- end of function InitTimerRA ----- */
如果 RA 没有使用,这段代码可以在你们的初始化程序中直接调用。如果出现问题,请 自行参看芯片资料编写初始化程序。具体每个寄存器对应的配置请参看芯片资料。
1.2.3. 速度与距离的计算:
速度与距离的计算可以如下编写(这段代码应该加在定时中断程序中,我们的定时中断 周期为 1ms,如果有不同定时中断周期只需要进行少量修改即可):
/*----------------------------Update Encoder Counter------------------------------*/ s_ucEncoderTimer ++; if(s_ucEncoderTimer > SPEED_SAMPLE_TIME) //SPEED_SAMPLE_TIME is 9,which means it will sample
定时器 RA 是具有一个 8 位计数器和 8 位预定标器的定时器。 所谓预定标器实际上也就是一个分频器,即对于计数器来说,只有当预定标器溢出的时 候计数器才会记一次数。 使用定时器 RA 作为编码器计数的时候,选用的是事件计数模式,这与一般使用的输入 捕捉模式不太一样,它只可以对单边沿的电平变化进行计数(上升或下降都可以),所以无 法实现程序上的倍频。但由于编码器线数已经比较高,而且也在电路上进行了倍频,所以程
华中科技大学智能车队
{ /* Clear the Speed Sample Time */ s_ucEncoderTimer = 0;
//the speed and the distance every 10 ms.
/* Combine the the TRA and TRAPRE to form a 16-bit binary number */ ucTRABuff = tra; ucTRAPREBuff = trapre; uiTempEncoderCount = ((unsigned int)ucTRABuff) << 8; uiTempEncoderCount |= (unsigned int)ucTRAPREBuff;
计数器总计数值
总距离 =
∗ 编码轮周长
编码器线数
第九句是用来计算速度的。计算公式如下:
计数器在一个采样周期内的差值
速度 =
∗ 编码轮周长
编码器线数
公式中的编码器线数指的是编码器转一圈所产生的脉冲数,这个数值可以通过转动编码 器一圈所返回的计数值的差来确定。不过一般来说在购买编码器时都会有编码器的线数的说 明,可以参看相应的产品说明。不过建议最好是实测一下以确定无误。
/* Function
InitTimerRA
*/
/* Usage
Initialize Timer RA
*/
/* Argument
NONE
*/
/* Return value NONE
*/
/* Modification History:
*/
/* 01a 2012-4-7 16:18:38
*/
/************************************************************************/
在实际的编码器使用中,常常会对编码器的输出作倍频处理,利用输出的 A、B 两相波 形,做一个异或处理,即可以实现编码器的倍频。
2. 电池的连接:
华科瑞萨淘宝店地址:/
我们使用的是八节三洋电池,我们直接用导线焊接来连接电池。 焊接的时候先把电池两头稍微打磨一下即可,然后再用稍高(350°)的温度焊接,如
/* Set TRAIO output active edge to 'L' */ tedgsel_traioc = 0;
/* Set EVENT Counter mode */ tmod0_tramr = 0; tmod1_tramr = 1; tmod2_tramr = 0;
/* Set RA Counters */ trapre = 0xff; tra = 0xff;
图 增量式光电编码器的输出信号波形
华中科技大学 简介:
码盘转动的时候,编码器输出的 A、B 两相方波信号时我们所需要的。一般只需要一相 方波就可以计算出转速了。
设编码器线数为 N,编码器的编码轮的直径为 R,程序编码器计数采样周期为 T。则可 知编码器转一圈会有 N 个正方波,编码器转一圈时代表的实际距离为编码轮的周长,即 2* π*R,设在时间间隔 T 内检测到的正方波为 n 个,则可以计算出这段时间内的平均速度为 2nRπ/(NT)。只要采样周期 T 足够小,就可以认为这个速度是当前的瞬时速度。
华中科技大学智能车队
编码器的使用和电池的连接
——华中科技大学智能车队
华科瑞萨淘宝店地址:/
1. 编码器的使用:
1.1. 增量式编码器原理:
一般来说,增量式光电编码器输出 A、B 两相互差 90°电度角的脉冲信号(即所谓的 两组正交输出信号),从而可方便地判断出旋转方向。同时还有用作参考零位的 Z 相标志(指 示)脉冲信号,码盘每旋转一周,只发出一个标志信号。标志脉冲通常用来指示机械位置或 对积累量清零。
我们使用的就是 Timer RA 的 Event counter mode,具体功能描述见下:
华中科技大学智能车队