指数曲线与时间常数T的对应关系
仪表工考试:仪表维修工高级技师试题及答案(最新版)

仪表工考试:仪表维修工高级技师试题及答案(最新版)1、多选仪表工程建设交工技术文件包括()。
A、未完工程项目明细表B、调试记录C、质量评定记录D、设计变更一览表正确答案:A, B, D2、单选精馏塔控制目标(江南博哥)是在保证质量合格的前提下()和能耗最低。
A、纯度最高B、回收率最高C、挥发度最低D、沸点最高正确答案:B3、单选?根据比例环节的方块图写出传递函数式()。
A、AB、BC、CD、D正确答案:D4、问答题气体产生阻塞流的原因?正确答案:所谓阻塞流,是指当调节阀两端压差增大到一定程度时,通过调节阀的流量将达到极限,进一步增大压差,流量也不会再增加,这种极限流量叫做阻塞流。
气体产生阻塞流的原因是其可压缩性,当压差增大到一定程度时,流量也基本上不随压差的增加而增加。
试验表明,气体产生阻塞流不仅与压差Δ有关,还与阀入口压力p1有关,即与压差比X=Δp/p1有关,产生阻塞流式的压差比称为临界压差比,用XT表示。
5、单选环节的特性是,当输入信号加入环节后,其输出信号()变化的规律。
A、按指数B、按比例积分微分C、随时间D、随控制条件正确答案:C6、单选设计反应器控制方案时首先要满足质量指标、()和约束条件。
A、流量B、压力C、温度D、物料和能量平衡正确答案:D7、单选比例环节的特征参数只有一个,即()。
A、放大倍数KpB、输入量X(S)C、输出量Y(S)D、偏差量E(S)正确答案:A8、多选对于单相变压器,如果忽略初、次级线圈的直流电阻和漏磁通时,线圈中感生电压与感生电动势之间存在的关系是()。
A、感生电压等于感生电动势B、感生电动势大于感生电压C、感生电压与感生电动势相位相同D、感生电压与感生电动势相位相反正确答案:A, D9、单选方块图中常用符号有分叉点。
根据需要,把()信号同时送至几个不同的方块,可以在信号线上任意一点分叉。
A、不同B、相同C、输入D、输出正确答案:B10、单选数字显示仪表的非线性补偿方法之一,是在将模拟量转换成数字量的过程中完成非线性补偿,这种方法叫做()。
时间常数

其他病因 0.65 0.28 0.60 0.10 0.63 0.12 0.72 0.18 0.84 0.39 1.06 0.63
Lourens MS, van den Berg B, Aerts JGJV, et al. Expiratory time constants in mechanically ventilated patients with and without COPD. Intensive Care Med 2000; 26: 1612-1618
膜肺结果
动物结果
两组数据相关性比较
模拟肺 y = 0.975x + 0.169
r2 = 0.974
动物试验(犬) y = 1.033x + 0.038
r2 = 0.969
Brunner JX, Laubscher TP, Banner MJ, et al. Simple method to measure total expiratory time constant based on the passive expiratory flow-volume curve. Critical Care Med 1995; 23(6):1117-1122
Lourens MS, van den Berg B, Aerts JGJV, et al. Expiratory time constants in mechanically ventilated patients with and without COPD. Intensive Care Med 2000; 26: 1612-1618
计算时间常数的简单方法
结论 • 评估时间常数(TauE)
– 呼气潮气量(Vte) – 呼气峰流量(PEFR)
浅谈影响心电图机准确性的技术指标及检测方法
浅谈影响心电图机准确性的技术指标及检测方法发表时间:2021-01-04T03:36:45.145Z 来源:《现代电信科技》2020年第13期作者:江峰姜丹琳[导读] 内容要求:心电图机的灵敏度是指输入电压为1mv 时的行程偏转量,通常用 mm/mv 表示,反映了整机放大倍数的大小。
心电图机的灵敏度一般分为3个等级(5mm/mv、10mm/mv、20mm/mv),分级可调。
心电图机的标准灵敏度是10mm/mv。
(桂林市计量测试研究所广西壮族自治区桂林市 541004)摘要:心电图机记录的心电图是用来放大心脏电流的变化而不失真,供医务人员诊断心脏功能是否正常或健康。
如果心电图机的性能出现异常,会给临床诊断带来误差。
心电图机的性能通常用其技术指标来衡量。
使用、检验和维护心电图机必须熟悉其技术指标,了解其内涵。
关键词:心电图机;技术指标;检测方法1灵敏度1)内容要求:心电图机的灵敏度是指输入电压为1mv 时的行程偏转量,通常用 mm/mv 表示,反映了整机放大倍数的大小。
心电图机的灵敏度一般分为3个等级(5mm/mv、10mm/mv、20mm/mv),分级可调。
心电图机的标准灵敏度是10mm/mv。
指定标准灵敏度的目的是便于比较各种心电图[1]。
在有的导联出现R波特别高或S波特别深时,也可以采用5mm/mV的灵敏度档位。
有的心电波电压比较微弱,也可采用比标准灵敏度更高的灵敏度如20mm/mV,以方便对心电图波形的诊断。
2)检测方法:如何判断心电图机的灵敏度是否正常,其检测方法为:导联选择开关置于“Test”位(有的标注“1mV”),灵敏度选择开关置于“l”档(10mm/mV),将工作开关置“观察”位,利用本机内的lmV标准信号,不断地打出矩形波,在走纸过程中,记录下矩形波的幅度。
调节增益电位器,变描记幅度正好为10mm。
改变灵敏度选择开关的位置,给出lmV标准信号时,应能得到成比例变化的矩形波信号。
2噪声和漂移1)内容要求:噪声是心电图机放大电路中,除了欲放大的心电信号之外的任何信号,都应称之为噪声,有来自机器外部,也有电路本身。
基于指数型曲线的步进电动机升降速控制方法

摘要 :传统的速度控制策略是匀加减速控制 , 无法使步进电动机的速度平稳地过渡到稳速运行状态 , 因 而不适用于动态性能要求较严格的场合 ;传统的控制器件多采用单片机 , 由于单片机是一种非并行执行的器 件 , 各信号之间的同步性将受到一定的影响 , 软件编程实现速度控制也较为繁琐 。 针对上述问题 , 文章在指 数型加减速曲线的速度控制理论的基础上 , 基于 CP LD 器件提出了一种脉冲连续可调的步进电动机升降速 控制方法 , 详细介绍了该方法的具体实现 。实际应用表明 , 脉冲连续可调的软件产生方法与硬件 CPL D 的 有机结合 , 较好地实现了步进电动机的升降速控制 , 避免了失步与过冲现象 , 节省了硬件资源 。
了按指数规律增长的特点 , 毫无疑问 , 当步进电动机
按照这样的频率运转时 , 效果是最佳的 。 在实际运
行中 , 该部分的控制流程如图 5 所示 , m 为离散化出 的点数 ;K 用来计算是否达到当前频率应该运行的 步数 。
依据上述的任意脉冲频率产生方法和 VH DL 语言设计流程 , 可以将整个设计归纳为如图 6 所示
各个 Δt 内运行的步数为 N i =[ f i Δt] , [ ] 表示取整 ,
按照四舍五入的原则 。将所有离散化的频率值之间
的步数值存入另一个数 N[ j] 中 。 在整个加速期间运
行的总步数为
i
N = ∑Nj j =1
降速曲线采用上述同样的方式处理 。
通过指数型曲线离散出的频率值已经严格符合
在 CPLD 内部实现脉冲分频常用的方法 是利 用计数器的不同位进行输出 。 但这种方法 1 个时刻 只能有 1 种偶数的分频频率出现 , 并且该频率值也
不一定适合驱动步进电动机[ 4 ~ 5] 。下面提出一种频 率合成的方法 :对一定范围内的频率 , 通过一种特殊 的分频方式产生互相不重叠的多种频率 , 再用一定 的组合方式来产生任意频率 , 使频率输出变得连续 可调 , 进而来适应步进电动机转速的不同频率需求 。 其原理如图 3 所示 。
一阶系统的时域分析

数T之间的关系。
时间t
0
T
2T 3T
…
输出量 0 0.632 0.865 0.950 … 1.0
斜率 1/T 0.368/T 0.135/T 0.050/T … 0.0
根据这一特点,可用实验的方法测定一阶系统的时间常 数,或测定系统是否属于一阶系统。
时间常数T是一阶系统的一个重要参数。 当t=3T时,响应输出可达稳态值的95%;
输出量和输入量之间的位置误差: t ess (t) 1(t) c(t) e T
稳态误差 :
t
lim
t
ess
(t
)
lim
t
e
T
0
三 一阶系统的单位斜坡响应
当一阶系统的输入信号为单位斜坡信号r(t)=t,其拉氏变 换为R(s)=1/s2,则系统的输出为:
C(s)
R(s) Ts 1
1 Ts 1
S tep R esponse 10
9
8
7
k 0.1
6
A m plitude
5
4
3
k 0.3
2
1
0
0
0.1
0.2
0.3
0.4
0.5
0.6
T im e (sec)
小结
• 一阶系统的传递函数和典型方块图 • 一阶系统的单位阶跃响应(单调上升曲线,性
能指标常用调整时间) • 系统对输入信号导数的响应等于对输入信号响
五.三种响应之间的关系
比较一阶系统对单位脉冲、单位阶跃和单位斜 坡输入信号的响应,就会发现它们的输入信号 有如下关系:
d (t) d [1(t)];
dt
1(t) d [t 1(t)]; dt
自动控制原理-第3章

响应曲线如图3-2所示。图中
为输出的稳态值。
第三章 线性系统的时域分析 法
图 3-2 动态性能指标
第三章 线性系统的时域分析 法
动态性能指标通常有以下几种:
延迟时间td: 指响应曲线第一次达到稳态值的一半所需的时间
上升时间tr: 若阶跃响应不超过稳态值, 上升时间指响应曲线从 稳态值的10%上升到90%所需的时间; 对于有振荡的系统, 上升时 间定义为响应从零第一次上升到稳态值所需的时间。上升时间越 短, 响应速度越快。
可由下式确定: (3.8)
振荡次数N: 在0≤t≤ts内, 阶跃响应曲线穿越稳态值c(∞)次 一半称为振荡次数。
上述动态性能指标中, 常用的指标有tr、ts和σp。上升时间tr 价系统的响应速度; σp评价系统的运行平稳性或阻尼程度; ts是同
时反映响应速度和阻尼程度的综合性指标。 应当指出, 除简单的一 、二阶系统外, 要精确给出这些指标的解析表达式是很困难的。
中可以看出, 随着阻尼比ζ的减小, 阶跃响应的振荡程度加剧。 ζ =0时是等幅振荡, ζ≥1时是无振荡的单调上升曲线, 其中临界阻尼 对应的过渡过程时间最短。 在欠阻尼的状态下, 当0.4<ζ<0.8时过
渡过程时间比临界阻尼时更短, 而且振荡也不严重。 因此在 控制工程中, 除了那些不允许产生超调和振荡的情况外, 通常都希
第三章 线性系统的时域分析法 4. 脉冲函数 脉冲函数(见图3-1(d))的时域表达式为
(3.4)
式中,h称为脉冲宽度, 脉冲的面积为1。若对脉冲的宽度取趋于 零的极限, 则有
(3.5) 及
(3.6)
称此函数为理想脉冲函数, 又称δ函数(见图3-1(e))。
第三章 线性系统的时域分析 法
实验5指导书 一阶电路的研究(电子)
一阶电路的研究一、实验目的1.研究RC 一阶电路的零输入响应、零状态响应和全响应的规律和特点。
2.学习一阶电路时间常数的测量方法,了解电路参数对时间常数的影响。
二、实验预习1.打印实验指导书,预习实验的内容,了解本实验的目的、原理和方法。
2.计算各表中要求的参数理论值,写出计算过程。
三、实验设备与仪器1、电路实验箱。
2、信号源,示波器。
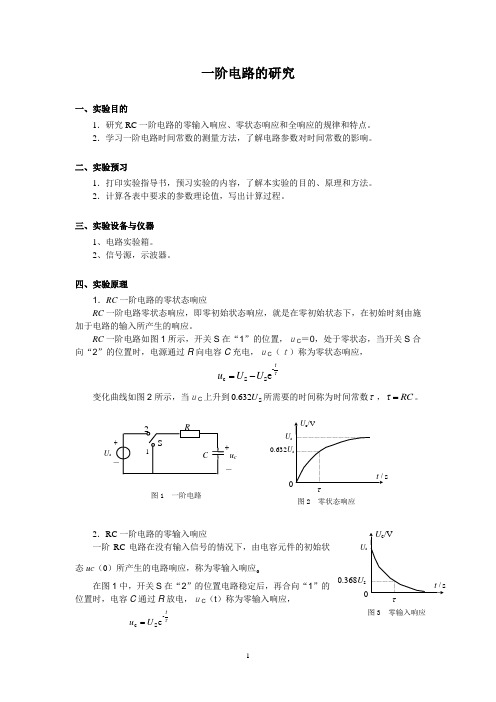
四、实验原理1.RC 一阶电路的零状态响应RC 一阶电路零状态响应,即零初始状态响应,就是在零初始状态下,在初始时刻由施加于电路的输入所产生的响应。
RC 一阶电路如图1所示,开关S 在“1”的位置,uC =0,处于零状态,当开关S 合向“2”的位置时,电源通过R 向电容C 充电,uC (t)称为零状态响应,τtU U u -S S c e -=变化曲线如图2所示,当uC 上升到S 632.0U 所需要的时间称为时间常数τ,RC τ=。
2.RC 一阶电路的零输入响应一阶RC 电路在没有输入信号的情况下,由电容元件的初始状态u C (0)所产生的电路响应,称为零输入响应。
在图1中,开关S 在“2”的位置电路稳定后,再合向“1”的位置时,电容C 通过R 放电,uC (t )称为零输入响应,τtU u -S c e =变化曲线如图3所示,当uC 下降到S 368.0U 所需要的时间称为时间常数τ,RC τ=。
U s 0.632U 图2 零状态响应U s0.368U s 图3 零输入响应U s u c 图1 一阶电路3.测量RC 一阶电路时间常数τ图4 方波激励信号 图5 响应信号图1电路的上述暂态过程很难观察,为了用普通示波器观察电路的暂态过程,需采用图4所示的周期性方波uS 作为电路的激励信号,方波信号的周期为T ,只要满足τ52≥T,便可在示波器的荧光屏上形成稳定的响应波形。
电阻R 、电容C 串联与方波发生器的输出端连接,用双踪示波器观察电容电压uC ,便可观察到稳定的指数曲线,如图5所示,在荧光屏上测得电容电压最大值(div)a Cm =U ,取(div)0.632a b =,与指数曲线交点对应时间t 轴的x点,则根据时间t 轴比例尺(扫描时间()div s t /),该电路的时间常数)/((div)x div s t ⨯=τ。
温度传感器的时间常数与滞后,温度传感器测温影响因素以及温度传感器的误差避免

温度传感器的时间常数与滞后,温度传感器测温影响因素以及温度传感器的误差避免温度传感器temperature transducer,利用物质各种物理性质随温度变化的规律把温度转换为可用输出信号。
温度传感器是温度测量仪表的核心部分,品种繁多。
按测量方式可分为接触式和非接触式两大类,按照传感器材料及电子元件特性分为热电阻和热电偶两类。
现代的温度传感器外形非常得小,这样更加让它广泛应用在生产实践的各个领域中,也为我们的生活提供了无数的便利和功能。
温度传感器的时间常数与滞后改善措施温度传感器时间常数和滞后与温度传感器的热容量和热阻有关,除选用时间常数、滞后小的温度传感器外,还应保证合理插入深度和正确安装方法,才能保证温度测量准确性、温度控制系统的稳定性和控制质量。
温度传感器时间常数和滞后实践证明热电偶、热电阻、双金属温度计当被测温度突然发生变化时,其输出会延迟一段时间,这段延迟时间△一般叫做纯滞后或纯时延。
在延迟△后,会以近似于指数曲线的规律变化(如下图所示),如忽略△,并以介质温度变化做计时起点,则上述曲线符合T=△T(1-e-t/),此式中T为温度;△T为温度变化;t为时间;为时间常数。
时间常数及时反应曲线起点的切线与平衡温度交点A所对应的时间,也就是输出变化63.2%△T所需要的时间。
正确认识和对待温度传感器的时间常数和滞后,是一个很重要的问题。
其关系到能否正确测量温度,及时反映被测量温度的变化。
其对温度控制系统的稳定性及控制质量好坏,具有举足轻重的作用,所以是一个不容忽视的问题。
如何改善温度传感器的时间常数和滞后温度传感器时间常数和滞后的大小,取决于元件的热容量和热阻。
因为温度传感器升温需要吸收一定的热量,其变化1℃所需要的热量就是温度传感器的热容量,热容量越小越好。
温度传感器传热又需要克服热阻,这和元件的结构、大小都有直接的关系。
金属是热的良导体,热阻的大小常受温度传感器的气隙、绝缘物、保护套管的影响。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
指数曲线与时间常数T的对应关系
瞬变的边沿可看作是无限高的频率信号XF2U-0415-3A,电容因而可视作短路。
在短路上产生压降需要无穷大的电流:
对于CR电路和LR电路的4种情形,我们现在可以画出加上阶跃电压后的变化图,如图1.33所示。
前面已讲到,这4种情形的曲线形状是一样的。
现在,再对曲线作进一步研究。
以原先的CR电路为例。
电容最终充电至输入电压Vi。
,因此,我们画出一条水平虚线,以此代表这个电压。
电容电压的上升有一个起始斜率,如果用另一条虚线代表这个起始斜率,我们将会发现,第二条虚线将在与CR相关的时间点上,与第一条虚线相交。
此时间点就是我们前面提过的时间常数。
CR时间常数的定义为,电容按照起始时的充电率,达到最终充电电压所需的时间,如图1.34所示。