前方交会计算
第12讲空间前方交会

S Z
Y
B
BX
a
Y X A S
Z Y
S
X
BZ
BY
a
Z
X
Y S
[二]空间前方交会公式
XYN NXYB BYX
NX NY
(5)
ZNZBZ NZ Z
Y
B
(c)
N
BX Z BZ X XZ ZX
S
BX
a
N
BX Z BZ X XZ ZX
Z
Y X A
A
Z Y
S
S BZ
X
BY
a
Z
X
Y
[二]空间前方交会公式
B
B
2 X
B
2 Y
B
2 Z
[三]模型点坐标和地面点坐标的计算过程 1、模型点坐标的计算 a. 连续像对相对定向之后,模型点坐标的计算过程
原始数据
确定角方位元素和基线分量
计算左右片在摄测坐标系中旋转 矩阵的方向余弦
a1 a2 a3
b1
b2
b3
E
c1 c2 c3
a1 a 2 a 3
b1
b 2
(X,Y,Z),(X,Y,Z)
计算投影系数 N和 N 计算模型点坐标( X,Y,Z)
X NX
Y
1 2
(NY
NY
BY
)
Z NZ
为什么Y 取中数?
X,Z?
[三]模型点坐标和地面点坐标的计算过程 1、模型点坐标的计算 a. 连续像对相对定向之后,模型点坐标的计算过程
Z Y
Z
XYNNXYBBYX
Z
BZ
N f
[二]空间前方交会公式
前方交会实验报告

前方交会实验报告1. 实验目的本实验的目的是通过前方交会方法测量两个点之间的距离和方位角,以及计算出测量误差,并分析误差来源。
2. 实验原理前方交会是一种基本的测量方法,用于确定两点之间的距离和方位角。
根据测量的原理,通过测量基线上A、B两个测站到待测点C的角度,再测量出A、B两个测站之间的方位角,即可计算出C点的坐标。
前方交会方法包括以下几个步骤:1.安装测量仪器:在点A和点B上,分别设置测站,安装全站仪或其他测量仪器。
2.观测角度:从点A观测点C的水平角和垂直角,从点B观测点C的水平角和垂直角。
3.计算方位角:根据测量仪器的读数和设定的测量参数,计算出A、B两个测站之间的方位角。
4.计算距离:根据测量仪器的读数和设定的测量参数,分别计算出A、B两个测站到点C的距离。
5.计算C点坐标:根据前面步骤得到的测量数据和计算结果,通过三角测量原理,计算出点C的坐标。
6.分析误差来源:根据实际测量和计算结果,分析误差的来源,并对测量结果进行评估和修正。
3. 实验步骤1.在实验区域内分别设置测站A和测站B,并确保两个测站之间有明显的目标点C供观测。
2.使用全站仪或其他测量仪器,分别观测点A和点B 到目标点C的水平角和垂直角,并记录测量数据。
3.根据测量数据,计算出测站A和测站B之间的方位角。
4.根据测量数据和方位角,计算出测站A到目标点C的距离,以及测站B到目标点C的距离。
5.使用三角测量原理,计算出目标点C的坐标。
6.分析误差的来源,评估测量结果的准确性,并进行相应的修正。
4. 实验数据和计算结果以下是实验中测量得到的数据和计算出的结果:•测站A到目标点C的水平角:30°•测站A到目标点C的垂直角:60°•测站B到目标点C的水平角:50°•测站B到目标点C的垂直角:40°•测站A和测站B之间的方位角:100°•测站A到目标点C的距离:50米•测站B到目标点C的距离:60米•目标点C的坐标:(100, 200)根据以上数据和计算结果,可以得出点C的坐标为(100, 200)。
空间后方—前方交会的原理

空间后方—前方交会的原理
以空间后方—前方交会的原理为题,我来为大家描述一下。
空间后方—前方交会是一种用于确定目标位置的方法,常用于航空、导航、测绘等领域。
它利用人眼的立体视觉和视差效应,通过观察目标在不同视角下的位置变化,来推断目标的实际位置。
这种方法可以较精确地确定目标的距离和方位,尤其适用于远距离观测。
在进行空间后方—前方交会时,我们首先需要选择两个观测点,它们之间的距离应足够远,以便产生明显的视差效应。
然后,我们分别在这两个观测点上观察目标,并记录下目标在两个观测点的位置。
接下来,我们需要测量观测点之间的距离,并确定观测点与目标之间的夹角。
这些数据将用于计算目标的实际位置。
通过对两个观测点的位置和距离进行几何分析,我们可以得到目标相对于观测点的位移向量。
然后,我们再将这个位移向量与观测点之间的夹角结合起来,就可以计算出目标相对于观测点的实际位置。
空间后方—前方交会的原理基于视差效应,即当我们观察远处的目标时,由于两只眼睛的视角不同,目标在两只眼睛中的位置也会有所不同。
通过比较这两个位置的差异,我们就可以推断出目标的实际位置。
总的来说,空间后方—前方交会是一种利用视差效应来确定目标位
置的方法。
它可以在远距离观测中提供较为准确的测量结果,具有广泛的应用前景。
角度前方交会法原理

角度前方交会法原理角度前方交会法是一种基本的测量方法,主要用于确定某一点的位置,特别是在野外测量和工程建设中。
该方法利用三角形相似性原理,将测量和计算过程分解为若干个简单的步骤,从而得到准确的测量结果。
本文将对角度前方交会法的原理、步骤和应用进行详细讲解。
角度前方交会法的原理角度前方交会法是基于三角形相似性原理的建立的。
三角形相似性原理指的是两个三角形的对应角度相等,对应边成比例关系。
在以下的图形中,三角形 ABC 和 DEF 相似,因为∠ABC =∠DEF,∠ACB =∠DFE和∠BAC =∠EDF。
与BC、AC、DC、EF、DF和DE相似的边成比例,即,BC/EF = AC/DF = DC/DE利用三角形相似性原理,可以得到角度前方交会法的基本原理:在已知两个点的位置和与这些点的连线所成夹角的情况下,可以测量出另外一个点的位置。
角度前方交会法的步骤角度前方交会法的测量可以分为以下步骤:第一步:在地面上确定两点的位置,并测量两点之间的距离。
这些点可以是明显的位置、桩点、或者标志物。
必须确认这些点的位置是精确的,以确保后续步骤的准确性。
第二步:测量这两点之间的夹角(或者方位角)。
这可以通过使用方位仪或者经纬仪测量得出。
如果使用经纬仪,则需要确定两点之间的经度和纬度,并计算方位角。
第三步:在第一点位置处测量与第一条线相交的第二条线的夹角(或者方位角),并测量与第二点位置的连线所成的夹角(或者方位角)。
记住将仪器调整到正确的方向上,确保夹角或者方位角的准确性。
第四步:从两个已知点的位置向前方测量出第三条线。
可以使用三角板或者望远镜或者其他测量仪器来测量这条线。
第五步:将第三条线的长度和与前两条线相交的夹角输入计算器。
计算器将使用三角形相似性原理来计算出第三条线相对于第一个点的位置。
确定了第三条线的位置之后,就可以测量和计算与该点相交的其他线。
角度前方交会法的应用角度前方交会法主要应用于建筑、土木工程和地理学中。
前方交会和侧方交会
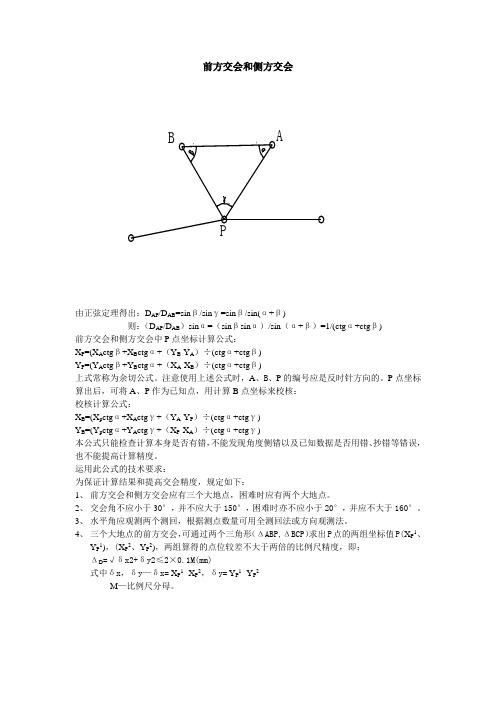
前方交会和侧方交会由正弦定理得出:D AP/D AB=sinβ/sinγ=sinβ/sin(α+β)则:(D AP/D AB)sinα=(sinβsinα)/sin(α+β)=1/(ctgα+ctgβ)前方交会和侧方交会中P点坐标计算公式:X P=(X A ctgβ+X B ctgα+(Y B-Y A)÷(ctgα+ctgβ)Y P=(Y A ctgβ+Y B ctgα+(X A-X B)÷(ctgα+ctgβ)上式常称为余切公式。
注意使用上述公式时,A、B、P的编号应是反时针方向的。
P点坐标算出后,可将A、P作为已知点,用计算B点坐标来校核:校核计算公式:X B=(X p ctgα+X A ctgγ+(Y A-Y P)÷(ctgα+ctgγ)Y B=(Y p ctgα+Y A ctgγ+(X P-X A)÷(ctgα+ctgγ)本公式只能检查计算本身是否有错,不能发现角度侧错以及已知数据是否用错、抄错等错误,也不能提高计算精度。
运用此公式的技术要求:为保证计算结果和提高交会精度,规定如下:1、前方交会和侧方交会应有三个大地点,困难时应有两个大地点。
2、交会角不应小于30°,并不应大于150°,困难时亦不应小于20°,并应不大于160°。
3、水平角应观测两个测回,根据测点数量可用全测回法或方向观测法。
4、三个大地点的前方交会,可通过两个三角形(ΔABP,ΔBCP)求出P点的两组坐标值P(X P1、Y P1),(X P2、Y P2),两组算得的点位较差不大于两倍的比例尺精度,即:ΔD=√δx2+δy2≤2×0.1M(mm)式中δx,δy—δx= X P1- X P2,δy= Y P1 -Y P2M—比例尺分母。
后方交会B如图所示,A、B、C是已知三角点,P点是导线点,将仪器安置在P点上,观测P至A、B、C各个方向之间的水平夹角α、β,然后根据已知三角点的坐标,可解算P点坐标。
前方交会的计算公式

前方交会的计算公式
前方交会是指在地球上从不同方向观察同一物体,利用三角测量原理计算出该物体在地球上的位置。
前方交会的计算公式由以下几部分组成:
1. 观测角度法
设物体在地球上的位置为A,观察者在地球上的位置为B,观察者在地球上另一点C处再次观测该物体,观测角度为α和β,则有以下公式:
tan α = (AB/AC) tan β = (AB/BC)
2. 向量法
设物体在地球上的位置为P,分别由两个观测者在地球上的位置A和B观测,得出向量AP和BP的方向角度分别为α和β,则设球半径为R,则有以下公式:
x = (Rsin α - Rsin β) / (cos α - cos β) y = (Rcos α(Rsin β - Rsin α) - Rcos β(cos α - cos β)) / (cos α - cos β)
3. 三边测量法
设物体在地球上的位置为P,分别由两个观测者在地球上的位置A和B观测,得出AP、BP和AB三条边的长度分别为a、b和c,则设球半径为R,则有以下公式:
cos A = (b^2 + c^2 - a^2) / (2bc) cos B = (a^2 + c^2 - b^2) / (2ac) cos C = (a^2 + b^2 - c^2) / (2ab)
其中,A、B、C分别为三个角度。
根据已知的A、B、C,可以使用三角函数计算出向量AP和BP的方向角度,进而求出物体在地球上的位置。
立体像对空间前方交会解算流程

立体像对空间前方交会解算流程下载温馨提示:该文档是我店铺精心编制而成,希望大家下载以后,能够帮助大家解决实际的问题。
文档下载后可定制随意修改,请根据实际需要进行相应的调整和使用,谢谢!并且,本店铺为大家提供各种各样类型的实用资料,如教育随笔、日记赏析、句子摘抄、古诗大全、经典美文、话题作文、工作总结、词语解析、文案摘录、其他资料等等,如想了解不同资料格式和写法,敬请关注!Download tips: This document is carefully compiled by the editor. I hope that after you download them, they can help yousolve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!In addition, our shop provides you with various types of practical materials, such as educational essays, diary appreciation, sentence excerpts, ancient poems, classic articles, topic composition, work summary, word parsing, copy excerpts,other materials and so on, want to know different data formats and writing methods, please pay attention!立体像对空间前方交会解算流程是一项重要的测量技术,用于测量和计算地球或宇宙空间中不同图像之间的空间位置和方向关系。
空间后方—前方交会的原理

空间后方—前方交会的原理空间后方—前方交会是一种导航技术,通过测量目标物体在不同观测点的角度,并利用三角测量原理计算目标物体的位置。
这种技术广泛应用于航空、航天、导航等领域,可以帮助人们准确地确定目标物体的位置和方向。
在空间后方—前方交会中,观测者需要站在不同的位置观测目标物体,并测量目标物体相对于观测点的角度。
观测者需要使用测角仪或其他测量工具来测量角度,并记录下相应的数据。
测量完所有观测点的角度后,观测者需要根据这些角度数据进行三角计算,以确定目标物体的位置。
三角计算是利用三角函数来计算角度和边长的关系,通过已知的角度和边长来计算未知的角度和边长。
观测者需要根据测量得到的角度数据和观测点之间的距离,使用三角函数计算目标物体的位置坐标。
空间后方—前方交会的原理简单明了,但在实际应用中需要考虑一些因素。
首先,观测者需要选择合适的观测点,观测点的位置应尽量避免遮挡物,以确保观测到目标物体的角度准确无误。
其次,观测者需要准确测量角度,并尽量避免误差的产生。
最后,观测者需要进行精确的三角计算,以确保计算出的目标物体位置准确无误。
空间后方—前方交会技术的应用非常广泛。
在航空领域,飞行员可以利用该技术确定飞机的位置和方向,以确保飞行安全。
在航天领域,航天员也可以利用该技术确定航天器的位置和方向,以实现精确的轨道控制。
此外,该技术还可以应用于导航系统中,帮助人们准确导航和定位。
空间后方—前方交会是一种通过测量目标物体在不同观测点的角度,并利用三角计算原理确定目标物体位置的导航技术。
该技术在航空、航天、导航等领域有着广泛的应用,可以帮助人们准确地确定目标物体的位置和方向。
通过合理的观测点选择、准确的角度测量和精确的三角计算,空间后方—前方交会技术可以为人们提供准确可靠的导航和定位服务。