蔬菜水培智能种植装置
智能水培生菜实施方案提纲
智能水培生菜实施方案提纲一、背景介绍随着人们对健康饮食的重视,生菜作为一种常见的蔬菜,受到了越来越多人的青睐。
而智能水培技术的应用,为生菜的种植提供了新的可能性。
本文将就智能水培生菜的实施方案进行提纲性介绍,希望能够为相关从业者提供一定的参考。
二、种植环境1. 温度和湿度控制:智能水培生菜适宜生长的温度为15-25摄氏度,相对湿度为60%-80%。
2. 光照要求:生菜对光照的要求较高,建议在生长过程中提供充足的自然光或人工光源。
3. 空气流通:保持种植环境内空气的流通,有利于生菜的生长和防止病虫害。
三、种植材料1. 种子选择:选择适合水培种植的生菜品种,如绿萝卜叶生菜、奥尔良生菜等。
2. 培养基选择:智能水培生菜一般使用无土栽培,可选择气孔多、保水性好的发泡塑料、气孔石棉等作为培养基。
3. 养分添加:在水培系统中需要添加适量的营养液,以满足生菜生长所需的养分。
四、种植管理1. 水质管理:保证水质的清洁和适宜,定期更换水源,避免水质污染对生菜生长的影响。
2. 光照管理:根据生菜的生长阶段,合理安排光照时间和强度,避免光照不足或过强对生菜生长的不利影响。
3. 营养液管理:定期检测营养液的浓度和PH值,根据生菜的生长情况适时调整营养液的配比。
五、病虫害防治1. 病虫害监测:定期对生菜进行病虫害的检查,及时发现并处理病虫害问题。
2. 生物防治:可以采用生物防治的方法,如释放天敌、使用有益微生物等,减少化学农药的使用。
3. 环境卫生:保持种植环境的清洁卫生,减少病虫害的滋生和传播。
六、收获和贮藏1. 收获时间:根据生菜品种和生长情况,选择适宜的收获时间,避免过早或过迟的收获影响品质。
2. 贮藏条件:收获后的生菜应迅速进行处理和贮藏,保持适宜的温度和湿度,延长生菜的保鲜期。
七、经济效益分析对智能水培生菜的实施方案进行经济效益分析,包括投入产出比、成本分析、市场需求预测等方面的内容。
八、总结通过对智能水培生菜实施方案提纲的介绍,我们可以看到,智能水培技术为生菜的种植提供了更加科学、高效的方式。
水培蔬菜作业设计方案
水培蔬菜作业设计方案水培蔬菜作业设计方案1. 概述水培蔬菜作业是一种无土栽培方式,通过将植物的根系浸泡在水中,并提供适当的养分供给,使植物能够正常生长与发育。
本方案旨在设计一种简单而有效的水培蔬菜作业方案,提供给学生进行探究式学习与实践操作。
2. 材料准备- 塑料容器:用于装水和种植蔬菜的容器,可选择适量大小的塑料盆、瓶子或罐子。
- 小型水泵:用于循环水液,保持水培蔬菜的湿润和充足的氧气供给。
- 水加热装置:用于控制水温,保持适宜的生长环境。
- 水培液:种植蔬菜所需的养分溶液,可以购买现成的水培养液或自制。
- pH测试仪:用于检测水培液的酸碱度。
- 种子或幼苗:选择适合水培的蔬菜种子或幼苗进行种植。
3. 实施步骤(1)准备容器:清洗并消毒选择的容器,确保无杂质和细菌。
(2)搭建水循环系统:将小型水泵安装在容器内,循环水液,提供氧气和养分供给。
(3)调节水温:根据种植蔬菜的要求,使用水加热装置控制水的温度,保持适宜的生长环境。
(4)调节水培液pH值:使用pH测试仪检测水培液的酸碱度,根据蔬菜的要求进行调节。
(5)种植蔬菜:将种子或幼苗放入水培容器中,确保根系完全浸泡在水中,定期提供养分溶液。
(6)光照调节:根据所选蔬菜的光照要求,将容器放置在适宜的光照环境下,或者使用人工灯光提供光照。
(7)定期更换水液:定期更换养分溶液,避免积累过多的盐分和细菌。
(8)观察与记录:学生需要定期观察蔬菜的生长情况,记录生长过程、特点和变化。
4. 学生实践活动(1)种子发芽观察:学生可以选择不同种子进行水培实验,观察种子的发芽情况和生长进程。
(2)养分对比实验:学生可以尝试自制不同配比的水培液,对比不同养分比例对蔬菜生长的影响。
(3)光照对比实验:学生可以将不同容器放置在不同光照条件下,观察和比较蔬菜在不同光照环境下的生长情况。
(4)探索水温对蔬菜生长的影响:学生可以通过调节水加热装置的温度,观察和记录水温对蔬菜生长的影响。
蔬菜种植新技术应用
蔬菜种植新技术应用
一、现代农业中的蔬菜种植新技术应用
随着科技的不断进步,现代农业中的蔬菜种植也迎来了新的技
术应用。
传统的农耕方式已经不能满足人们对蔬菜的需求,因此农
业专家们不断探索创新,引入新技术,提高蔬菜的产量和质量。
二、智能温室种植技术
智能温室是一种集成了传感器、自动控制系统和智能化设备的
现代化种植设施。
通过监测温度、湿度、光照等环境因素,智能温
室可以实现自动化的种植管理,提高蔬菜的产量和品质。
此外,智
能温室还可以实现远程监控和智能化调控,减少人工成本,提高种
植效率。
三、水培技术在蔬菜种植中的应用
水培技术是一种将植物根系悬浮在营养液中生长的种植方式。
相比传统土壤种植,水培技术可以更精准地控制植物的营养供给,
避免土壤传染病的传播,提高蔬菜的产量和质量。
此外,水培技术
还可以节约用水,减少农药残留,符合现代农业的可持续发展理念。
四、无土栽培技术的创新应用
无土栽培技术是一种利用营养液直接供给植物生长所需营养的
种植方式。
通过无土栽培,可以避免土壤传染病的传播,减少农药残留,提高蔬菜的品质和安全性。
同时,无土栽培还可以实现水资源的节约利用,减少土地占用,是一种环保、高效的种植方式。
五、结语
随着现代农业技术的不断发展,蔬菜种植也迎来了新的机遇和挑战。
智能温室、水培技术、无土栽培技术等新技术的应用,为蔬菜种植带来了全新的可能性,提高了产量和质量,推动了农业的可持续发展。
相信随着科技的不断进步,蔬菜种植新技术将会在未来发挥更加重要的作用,为人类提供更加安全、健康的蔬菜产品。
智能水培方案
智能水培方案智能水培方案是一种先进的植物种植技术,通过利用现代化的设备和智能控制系统,实现对水、养分、环境等各个方面的精确调控,以实现高效生长和优质产量。
本文将介绍智能水培方案的原理、设备和优势,以及其在农业领域的应用前景。
一、智能水培方案的原理智能水培方案的核心原理是通过浸泡植物根系在营养溶液中,提供充足的水和养分供给,并通过氧气供应保证根系的呼吸。
相比传统土壤种植,水培种植方式能够直接将水和养分输送到植株根系周围,提高了养分的利用率,减少了浪费。
同时,水培种植方式还可以有效控制水分和养分的供应,使植株能够获得恰到好处的水和养分,提高了生长质量和产量。
二、智能水培方案的设备智能水培方案的设备主要包括水培槽、水泵、氧气泵、光源等。
水培槽用来装载水和养分溶液,为植物提供生长所需的水和养分。
水泵根据设定的时间和需求,将水和养分溶液提供给植物根系,保持植物处于良好的生长环境中。
氧气泵通过供应氧气,保证水中的氧气含量,解决植物根系在水中生长的呼吸问题。
光源则提供植物进行光合作用所需的光能,维持植物正常的光合作用和生长。
三、智能水培方案的优势智能水培方案相比传统种植方式有许多优势:1. 节水环保:智能水培方案中水和养分溶液可以循环利用,减少了水的浪费。
同时,由于没有土壤,也减少了土地污染。
2. 高产优质:智能水培方案能够精确控制水和养分的供应,使植物能够得到最佳的生长环境,提高了产量和品质。
3. 空间利用率高:由于水培槽可以垂直布置,因此可以有效利用空间,增加种植密度,提高土地的利用率。
4. 自动化管理:智能水培方案中的设备可以通过智能控制系统实现自动化管理,包括控制水和养分供应、调节温度和湿度、监测光照强度等,减轻了劳动强度和人工成本。
四、智能水培方案在农业领域的应用前景智能水培方案在农业领域有着广阔的应用前景。
首先,智能水培方案能够在各种气候条件下实现蔬菜、水果等作物的生产,为城市周边等土地资源有限的地区提供了一种高效的种植方式。
水培设施介绍
家庭水培设备介绍
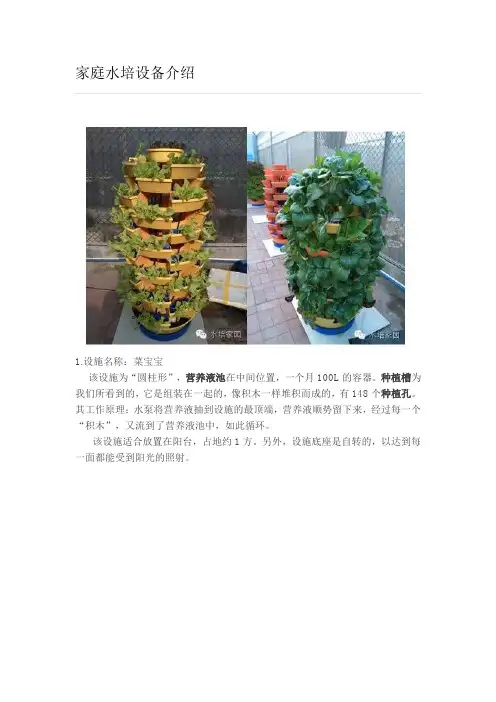
1.设施名称:菜宝宝
该设施为“圆柱形”,营养液池在中间位置,一个月100L的容器。
种植槽为我们所看到的,它是组装在一起的,像积木一样堆积而成的,有148个种植孔。
其工作原理:水泵将营养液抽到设施的最顶端,营养液顺势留下来,经过每一个“积木”,又流到了营养液池中,如此循环。
该设施适合放置在阳台,占地约1方。
另外,设施底座是自转的,以达到每一面都能受到阳光的照射。
2.设备名称:太极盆
该设备分为两层,第一层放置营养液,第二层放置基质,因此取名叫太极盆。
该设置综合了水培和基质培的优势。
种植爱好者可以尝试一下种植花卉,比较好管理,不用经常浇水,也不用通电。
3.这个两个设施,占地面积不大,但是需要一面较大的墙面。
左图属于“报架式”的水培设施可以根据需要做成合适的大小;右图为“挂墙式”的水培设施,同样可以做成不同规格的大小。
4.设备名称:水培智能种菜机
该设备也是比较高级的一种设施,能自动检测温度、湿度,还有自带的补光系统,还可以播放音乐,另外还可以连接手机APP,实时观测蔬菜种植情况。
有这么多功能,自然价格较贵。
目前,我们正在种植中,随后会继续反馈给大家。
作者:水培家园
3、欢迎有志人士加入水培家园交流qq群196689687长按以下二维码,识别图中二维码点击关注公众号。
一种城市家庭蔬菜栽培装置设计
2020年第20期现代园艺一种城市家庭蔬菜栽培装置设计徐文栋1,席雪琴1,杨岩1,谢丽霞1,柴贵贤1(武威职业学院,甘肃武威733000)摘要:家庭蔬菜栽培具有观赏性强,生长快,种植不受地域、季节及栽培者专业程度的限制等特点,研发一种适宜家庭蔬菜栽培的装置,对家庭园艺产业具有重要的意义。
该装置采用单片机控制系统进行全自动控制,利用新型LED光源,实现了蔬菜种植管理的智能化和自动化,安装方便,人工干预少,不仅绿化了家居环境,还经济实用,安全放心。
关键词:城市家庭;蔬菜栽培;智能控制;装置设计近年来,由于许多蔬菜在生产中施用农药超标,严重影响了蔬菜的食用安全,人们吃不到健康、无公害的安全绿色蔬菜。
家庭蔬菜栽培不仅具有观赏性强,生长快,种植不受地域、季节及栽培者专业程度的限制等特点,且种植过程中不施加任何农药化肥,其产出的蔬菜无病虫害,能够放心食用,兼具了绿化家居环境、陶冶情操的效果,满足了消费者对蔬菜的需求表现出求新、求异、求安全的特点[1]。
目前国外家庭蔬菜栽培的理论研究和建设实践相对早于国内,研究和技术实践均具有较高的发展水平[2]。
国内家庭蔬菜栽培起步较晚,随着近年来国民收入的稳步提高,我国的家庭园艺产业已初步形成,但与国外发达国家相比还有很多不足。
吴正玲等研发的智能家庭蔬菜栽培柜通过设置温度、湿度、照度等环境参数,经中央处理器处理后,发送指令,实施通风、浇水、照明等操作,实现蔬菜种植环境的自动控制与调节[3]。
刘俊春研发了一立体式鱼菜共生系统,融合水产养殖和水耕栽培2种不同的农业工程技术,形成一种生态型农业新技术[4]。
虽然国内的城市家庭蔬菜栽培取得了一定的发展,但适宜城市家庭种植的蔬菜种类品种单一,不够齐全,从业人员服务不够专业和周全。
多数产品都不能满足消费者的需求,消费者对家庭园艺的消费意识也不高。
随着无土蔬菜种植技术的推广与应用,为城市家庭阳台、屋顶或庭院培育盆栽蔬菜提供了有力的技术支持。
自制水培蔬菜种植设备
自制水培蔬菜种植设备水培种植是一种适用于在没有土壤的条件下种植植物的方法。
它利用水中的养分来滋养植物,取代了传统的土壤栽培方式。
自制水培蔬菜种植设备是一种简单、便宜且高效的种植方法,可以在家中或者小型农业区域中进行。
下面我将详细介绍如何制作自制水培蔬菜种植设备。
首先,准备所需材料和工具。
您将需要一个透明的塑料容器,它将用作水槽。
此外,您还需要一些小碎石或河沙,它们用作植物的根系支撑和排水层。
您还需要一些培养植物所需的适当养分溶液、种子和一个光源(例如LED灯)。
接下来,开始制作自制水培蔬菜种植设备。
首先,在容器的底部放置一层小碎石或河沙,这将用作排水层。
然后,将养分溶液慢慢倒入容器中,直到液面稍高于排水层。
根据种植蔬菜的类型,您可以使用相应的植物养分溶液,或者您可以自行制作。
接下来,准备植物的种子。
将种子放在温水中浸泡数小时,这有助于促进种子的出芽。
然后将种子放在湿润的纸巾或织物上,覆盖并保持湿润。
在种子出芽后,您可以将它们转移到水槽中的培养介质中。
将培养介质插入容器中的排水层中,确保介质与养分溶液接触,以便植物能够吸收所需的养分。
然后,为植物提供适当的光照。
将LED灯或光源安装在适当的位置上,以确保植物能够得到足够的光照。
植物需要光照来进行光合作用,以生长和发育。
在整个种植过程中,要经常检查水槽中的水位和养分浓度。
保持水槽中的水位稳定,确保植物根系始终与养分溶液接触。
对于水槽中的养分溶液,您可以使用商用的水培肥料,也可以自行制作。
更新养分溶液和更换排水层是保持植物健康的重要步骤。
此外,还要定期检查植物的生长状态并进行维护。
确保植物没有受到病虫害的侵害,适当修剪和除草。
根据植物的成长情况,您可能需要调整养分溶液的浓度。
自制水培蔬菜种植设备不仅可以为您提供新鲜的蔬菜,还可以在家中或小型农业区域中提供一种有趣且有益的种植体验。
它节省了空间和资源,并且可以根据个人喜好和需求进行定制。
通过合理利用光照和养分,您可以在自制水培蔬菜种植设备中种植出健康、味道鲜美的蔬菜。
“水培蔬菜”方案
“水培蔬菜”方案水培蔬菜是指在不使用土壤的情况下,通过将植物的根部浸泡在水中,并给予适当的养分供给,使植物能够正常生长和发育的一种种植方式。
相比传统土壤种植,水培蔬菜具有一系列的优点,例如节约用水、提高产量、减少病虫害等。
下面是一个关于“水培蔬菜”方案的详细介绍。
一、方案目标1.实现高效的水培蔬菜种植,提高产量和质量。
2.节约用水资源,减少用水量。
3.减少病虫害的发生,降低农药使用。
4.探索水培蔬菜的可行性,为推广水培栽培提供经验。
二、方案步骤1.材料准备:购买种子、培养槽、水泵、氧气泵、养分液、pH酸碱测试仪等设备和物资。
2.种植媒介准备:使用硅胶珠、腻子粉等无土栽培的种植媒介,清洗并消毒,确保无杂质。
3.槽水准备:用自来水灌满培养槽,并加入适量的养分液和pH调节剂,保持水质的稳定。
4.种植过程:a.种子处理:将种子浸泡在适量的温水中,待其吸水膨胀后,再将其移至湿润的种植媒介上。
b.种植方式:将种植媒介中的种子均匀分布在培养槽中,确保每个种子都能浸泡在水中。
c.光照管理:提供适当的光照条件,可以采用人工光源或自然阳光。
d.水质调节:定期检测培养槽中的pH值和养分浓度,并进行调节,保持稳定。
e.微生物控制:定期对培养槽中的水质进行消毒,避免病虫害的传播。
f.营养供给:给予植物适量的养分液,包括氮、磷、钾等必需元素。
g.病虫害防治:定期检查植株,及时发现并处理病虫害问题,可以采用有机农药等方法。
h.生长调控:根据植株的生长情况,及时调整水位和养分供应,保证植物的健康生长。
i.收获和清洁:待植物生长到一定阶段,进行收获,同时清洗和消毒所有种植工具和设备。
三、方案优势1.节约用水:相比传统土壤种植,水培蔬菜的用水量可以减少约70%左右。
2.提高产量和质量:水培蔬菜的根部能够充分吸收养分,生长更为快速,产量较高;同时由于没有土壤的限制,植物的根系能更好地发展,对外界的营养吸收更为敏感,从而提高了蔬菜品质。
水培装置工艺流程解析
水培装置工艺流程解析水培装置工艺流程解析引言:水培技术是指将植物种植在不使用土壤,而是使用水中溶解的营养液中的一种种植方式。
水培装置工艺流程是指植物在水培种植过程中的各个环节和步骤。
本文将深入探讨水培装置工艺流程的多个方面,包括材料的选取、植物的适应性、水培环境的设置等,并分享对水培技术的观点和理解。
第一部分:材料的选取在水培装置工艺流程中,选择合适的材料对于植物的生长和发育至关重要。
首先,需要选择适合水培的植物品种,如叶菜类、草本植物等。
其次,选取适合水培的容器,如水培槽、水培管道等,应具有良好的光透性、耐腐蚀性和适应不同植物生长的尺寸。
第二部分:植物的适应性在水培装置工艺流程中,植物的适应性是一个关键因素。
一些植物品种在水培环境中能够生长和生存得更好,而另一些植物则不太适合水培。
因此,在选择植物品种时,要考虑其对水培环境的适应性,包括其对水质和养分需求的要求。
同时,通过适当的调整水质和养分供应,可以增强植物在水培环境中的适应性。
第三部分:水培环境的设置水培装置工艺流程中,水培环境的设置对于植物的生长和发育至关重要。
首先,要保持恒定的水温,在适宜的范围内控制水温可以促进植物根系的发育。
其次,合适的光照是植物正常生长的重要因素,可以使用人工光源或自然光进行补光,以满足植物的光合作用需求。
此外,适当的通风和湿度控制也是重要的环境因素,可以防止病虫害的发生,并提供适宜的生长环境。
总结和回顾:水培装置工艺流程中,材料的选取、植物的适应性和水培环境的设置是关键的因素。
选择适合水培的植物品种和容器材料,有助于植物在水培环境中获得更好的生长和发育。
植物的适应性是影响水培成功的重要因素,通过合理调控水质和养分供应,可以提高植物的适应性。
水培环境的设置需要关注水温、光照、通风和湿度等因素,以提供良好的生长环境。
综上所述,水培装置工艺流程对于水培技术的成功应用至关重要。
观点和理解:水培技术作为一种创新的种植方法,在现代农业中具有广阔的应用前景。
简易蔬菜自动浇水系统的设计和应用
整套简易蔬菜自动浇水系统分为 3 个模块,第一 为供水模块,水源我们采取独立蓄水池,加上浮球阀的 设计,可以保持蓄水池水位,不依赖水龙头等外界水 源,配合小型潜水泵的使用,给予整个设备动力,使整 套系统有独立的水源和独立的动力;第二部分为控制 模块,包括电磁阀和定时器,定时器Байду номын сангаас手动选择定时开 启电源及切断电源的时间,而电磁阀则通过电源的通 断控制水路通断,从而实现定时自动浇水功能;第三部 分为灌溉系统模块,阳台、屋顶等家庭种植蔬菜多采用
:蔬菜;基质育苗;自动浇水系统;设计
近几年,随着城市环境日益恶劣,食品安全问题日 趋突出,越来越多的城市居民开始关注蔬菜种植,比如 在自家阳台、楼顶或院子种植新鲜蔬菜,建立一个属于 自己的小菜园,既能为忙碌的都市生活增添一份田园 乐趣,也能为家庭提供健康的绿色蔬菜。
家庭种植蔬菜面临的首要问题便是灌溉问题,随 着城市生活节奏不断加快,工作繁忙,无法及时进行灌 溉,这也是导致大多数居民有种植蔬菜的想法而止步 于行动的原因。如今市面上所售自动浇水装置,大多数 为直接水龙头设备,出水靠水龙头水压控制,最多配置 30~40 个喷头,浇灌面积十分有限。对于种植密度大 的楼顶、天台、院子、大阳台来说,这种小型自动浇水装 置就不适用,为改变这种状况,我们设计了一套简易蔬 菜自动浇水系统,并在蔬菜生产和基质育苗等方面进 行了尝试和使用。 1 系统设计基础原理
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一种蔬菜水培种植装置摘要蔬菜水培种植装置属于农业设备领域,其包括培植架、基架、培植盆、摆动装置、泵组、种植配方和控制单元。
培植架包括多层平行布置的承载部和立杆,承载部和立杆铰接,培植架装配于基架上并铰接,培植盆被置放于各层承载部上,所述基架、承载部和立杆构成平行四边形机构,摆动装置和基架、培植架分别连接,种植配方内置供液量、液位及摆动幅度的预设值。
基于种植配方,控制单元对培植架的摆动倾斜、摆动直立和摆动幅度及向培植盆输送营养液和水进行自动操作,以使被种植蔬菜正常生长;种植装置被摆动倾斜和摆动直立,培植盆依次错开和再次层叠,培植盆的空间姿态始终保持不变,培植盆内的培植液不会洒落及污脏种植场地。
开发背景蔬菜的水培种植是现有的无土栽培技术,该蔬菜采用营养液施肥,营养液中溶解有蔬菜生长所需的矿物质。
无土栽培需要有由贮液盆及定植件构成的培植盆,定植件用于容纳并支撑所种植的蔬菜,蔬菜的根系悬浮在的培植液中,在蔬菜的生长过程中,不断向的培植液里加入蔬菜生长所需要的营养液。
在蔬菜的无土栽培活动,特别家庭种植活动中,为了增加空间的有效利用及方便管理,常把培植盆放置在具有多层结构的直立式种植装置上,使多层培植盆相互层叠,减小培植盆所占用的空间,提高单位空间的产出率。
但造成部分蔬菜无法获得充足的阳光,影响蔬菜正常进行光合作用。
于是产生了一种种植装置,该种植装置被倾斜设置,被放置的多个培植盆能依次错开,蔬菜能获得充足的光照,但在无阳光时,种植装置不能被恢复其直立状态,增加了所占用的空间。
申请号为201520872150.1的中国专利申请中公开了一种无土水培蔬菜架,该蔬菜架的下部设置转动调节装置,操作转动调节装置使蔬菜架摆动倾斜,各层种植箱依次错开,蔬菜均能获得较充足的阳光;根据需要,操作转动调节装置又能使蔬菜架摆动恢复原直立状态,各层种植箱再次层叠,节省了蔬菜架所占用的空间。
但是,该专利申请没有公开蔬菜架在被摆动过程中使种植箱保持水平的技术方案,蔬菜架在被摆动倾斜过程中种植箱将随之产生倾斜,一方面易造成种植箱中的营养液洒落,另一方面导致种植箱中一侧的营养液液位的高度高于相对侧的,易造成蔬菜吸收的养份不均匀,根系生长发育不同步,影响蔬菜的同步生长,导致成品蔬菜大小不一。
为此,亟需开发一种蔬菜水培种植装置,该种植装置自动地为蔬菜输送营养液、水和增加光照,其在被摆动倾斜和摆动直立的过程中,培植盆依次错开和再次层叠, 培植盆的空间姿态始终保持不变,可以保持水平。
开发内容为了便于阐明种植装置的技术方案及技术目的,下面结合附图对其做进一步的介绍。
文中关于空间方位的表述在此作统一约定,空间方位以各种植装置方式中第一幅附图的空间方位为参考基准,“前”指附图中离读者最近的一边侧,“后”指附图中离读者最远的一边侧,“左”指附图的左侧,“右”指附图的右侧,“纵向”指附图中从前向后或从后向前,“横向”指附图中从左向右或从右向左,“内”指附图轮廓线的内部,“外”指附图轮廓线的外部。
种植装置1一种蔬菜水培种植装置,如图1-图7、图21-图23所示,所述蔬菜水培种植装置包括基架10、培植架20、摆动装置30、伸缩腿装置40、培植盆50、传感器组60、泵组70、光照装置80、控制单元90以及水贮存器104和营养液贮存器105。
所述基架10为种植装置的支撑基础,基架10的顶部被设有多个第一连接部12。
培植架20,为种植装置的承载主体,包括多层承载部22和多支立杆23,承载部22相互平行或水平布置,承载部22和立杆23分别铰接,任二承载部22和立杆23构成平行四边形机构。
培植架20的立杆23的下端部被设有多个第二连接部21,第二连接部21与平行四边形机构相适配,第一连接部12和第二连接部21相配合。
培植架20装配基架10上,第二连接部21和第一连接部12铰接。
所述铰接的铰接转动方向沿横向设置,所述基架10、任一承载部22和立杆23构成平行四边形机构。
培植盆50用于支撑和容纳被水培种植的蔬菜,分别被放置于各层承载部22上。
光照装置80分别被设置于各层培植盆50的上方,其出光面对着培植盆50内被种植的蔬菜,分别和培植架20固定。
所述平行四边形机构适于培植架20相对于基架10沿着与铰接转动方向相垂直的纵向平面作纵向摆动,培植架20的立杆23绕与其相关联的第二连接部21和第一连接部12相铰接的铰接转动轴旋转,培植架20摆动倾斜和摆动直立,培植架20实现作纵向摆动,该摆动包括摆动倾斜和摆动直立。
在纵向摆动过程中,各层培植盆50依次错开和再次层叠,只有立杆23发生转动运动,承载部22只做平动运动,承载部22的空间姿态始终保持不变,因此,培植盆50的空间姿态保持不变,培植盆50被水平布置时,培植盆50始终保持水平。
培植架20的下部被设置多个摆动连接部25。
摆动装置30,用于驱动培植架20作纵向摆动,其和基架10装配并固定,摆动装置30的摆动输出机构37和摆动连接部25相连接。
伸缩腿装置40沿纵向布置,和基架10装配并固定,在培植架20作摆动倾斜的过程中,用以增强种植装置在纵向的稳固性,以防止其侧翻。
泵组70用于向培植盆50分别输送水、营养液和空气。
所述泵组70、水贮存器104和营养液贮存器105分别与基架10相装配并固定。
所述摆动装置30、伸缩腿装置40、传感器组60、泵组70、光照装置80分别和控制单元90电连接,如图22所示。
控制单元90为种植装置的控制中心,用于对种植装置的稳定性,种植装置的摆动倾斜、摆动直立和摆动幅度,向培植盆50输送水、营养液和空气,被种植的蔬菜增加光照和补充光照分别进行自动控制。
其中,所述基架10,为卧式结构,沿横向布置,为所述种植装置的支撑基础,如图1、图3所示,其由基架本体11、第一连接部12构成。
所述基架本体11为由横杆15、纵杆16、支撑腿14构成的呈长方体的框架结构,其还可以被理解为一个中空的箱体,内部可以用于放置物品及相关设备。
如图3所示,四个支撑腿14分别分布在长方体框架的四角侧,均直立设置。
基架本体11上的位于前边侧的两个横杆15沿横向平行设置,该横杆15的两端部分别和位于该前边侧两个支撑腿14的上部和下部分别固定连接;基架本体11上的位于后边侧的两个横杆15沿横向平行设置,该横杆15的两端部分别和位于该后边侧两个支撑腿14的上部和下部分别固定连接;基架本体11上的位于左边侧的两个纵杆16沿纵向平行设置,该纵杆16的两端部分别和位于该左边侧两个支撑腿14的上部和下部分别固定连接;基架本体11上的位于右边侧的两个纵杆16沿纵向平行设置,该纵杆16的两端部分别和位于该右边侧两个支撑腿14的上部和下部分别固定连接。
所述横杆15、纵杆16、支撑腿14通过固定连接构成了前述的长方体框架结构,如图3所示,另外,在长方体框架的外部固定板材可以构成柜子式基架。
所述第一连接部12选用呈“U”字型的用于枢轴连接的枢接部,该枢接部上设有用于装配枢轴的枢孔。
所述第一连接部12的数量为四个,四个第一连接部12a、12b、12c、12d设置在基架本体11的顶部,如图3所示,分别位于支撑腿14的顶部,以增加基架10的承载能力,并在相同载荷重量情况下,可以节省横杆15、纵杆16的用料量,有效减轻种植装置的重量并降低其制造成本。
所述第一连接部的枢孔均沿横向设置,其中位于前边侧的两个第一连接部12a、12b的枢孔相共轴线,位于后边侧的两个第一连接部12c、12d的枢孔相共轴线。
其中,所述培植架20,为种植装置的直立式承载主体,如图3所示,包括承载部22、立杆23、横向杆24、第二连接部21及摆动连接部25。
立杆23的数量为四支,四支立杆23a、23b、23c、23d分布于培植架20的四角侧,沿竖直方向设置,构成长方体框架结构的四角侧,为培植架20重量的承重杆。
承载部22呈方形,其由水平布置的方形平板部和围壁部构成,围壁部位于平板部的四周边侧,由平板部的上表面向上延伸,用以防止培植盆滑落,围壁部所围的平板区为承载区;此外,承载部22还可以仅由平板部构成。
承载部22的数量为三层,水平设置,沿立杆23等间距分布,如图3所示。
承载部22的承载区用于放置培植盆,选用带有网孔的平板,以增强空气在竖直方向的对流流通,如图3所示。
需要说明的是,承载部22的承载区还可以选用与培植盆相适配的用于承托培植盆的承载篮(图中未画出)。
所述承载部22的左边侧部上设置两个第一枢接部221,其中一个第一枢接部221位于承载部的前边侧,另一个第一枢接部221位于承载部的后边侧;承载部22的右边侧部上设置两个第一枢接部221,其中一个第一枢接部221位于承载部的前边侧,另一个第一枢接部221位于承载部的后边侧。
因而,所述承载部22上共设有四个第一枢接部221。
所述四个第一枢接部221为与承载部22固定连接的且沿横向向外延伸的四个枢轴,枢轴均沿横向分布,如图3所示,其中位于前边侧的两个枢轴共轴线,位于后边侧的两个枢轴共轴线。
此外,作为第一枢接部221的四个枢轴还可以被分别固定在承载部22前、后两边侧部的左右两端(图中未画出)。
所述立杆23的结构相同,每支立杆23上均设置三个第二枢接部231,该三个第二枢接部231沿立杆长度方向等间距分布,即任两相邻的两个第二枢接部231之间的距离相等。
所述第二枢接部231与第一枢接部221相适配。
第二枢接部231为设置在立杆23上通孔,即用于枢轴连接的枢孔,并形成“一”字型的枢接部。
所述四支立杆23a、23b、23c、23d分布于承载部22的外边侧,其中两支立杆23b、23c位于承载部22的左边侧,另两支立杆23a、23d位于承载部22的右边侧,且与承载部22上的第一枢接部221相适配。
因此,相对于承载部22,立杆23分布于左、右两相对边侧。
四支立杆23a、23b、23c、23d上在与该承载部22相对应位置处共有四个第二枢接部231,该四个第二枢接部231和承载部22上的四个第一枢接部221相配合。
所述承载部22和四支立杆23通过四对上述作为第一枢接部的枢轴、作为第二枢接部的枢孔相枢轴连接,构成铰链,该枢轴连接处的枢轴沿横向,也即是铰链的铰接转动方向沿横向。
因而,四支立杆23中的两支立杆23b、23c分布于左边侧,和承载部22的左边侧部枢轴连接,另两支立杆23a、23d分布于右边侧,和承载部22的右边侧部枢轴连接。
该承载部22和立杆23枢轴连接的四个枢轴中,其中位于前边侧的二个枢轴共轴线,位于后边侧的二个枢轴共轴线。
如此,三层承载部22和四支立杆23分别装配并枢轴连接,如图3所示,三层承载部22相互平行,承载部22沿立杆等间距分布,任二层承载部22和立杆23构成平行四边形机构。
所述立杆23和承载部22的左、右两边侧部分别枢轴连接,可以避免立杆23和承载部22间发生碰撞,以及避免立杆23和承载部上的培植盆间发生碰撞。