浙大05-95自控原理考研题_七_-杂辑
浙大自控原理习题课

K 10
T
T 1
11. 系统的开环频率特性为:
G( j)H ( j) K ( j 1) j( j 1)
0
K 1
G( j)H ( j) K 1 2 K
0
12
G( j)H ( j) 180 arctan 90 arctan
G(s)H (s) K (s 1) , K 0 s(s 1)
应用奈氏判据判断闭环系统的稳定性。
1. (1)系统的传递函数为
G(s)
K (2s 1)
s(4s 1)(0.5s 1)(0.2s 1)
由于 L(1) 20 lg K 20 lg1 20 lg 1 22 20 lg 1 42 20 lg 1 0.52 20 lg 1 0.22 0
4.47 0.56
系统开环传递函数为:
G(s) 20 s(s 5)
KV 4 稳态误差 e() 0.25
2.(2)加入微分反馈时的系统闭环传递函数为:
Φ(s)
s2
(5
20 2Kd
)s
20
2 n
2 n
5
20 2
K
d
由于 0.8
Kd 1.08
得 K 2.1,所以传递函数为
G(s)
2.1(2s 1)
s(4s 1)(0.5s 1)(0.2s 1)
() 90 arctan 2 arctan 4 arctan 0.5 arctan 0.2
(c ) 140 .43 相位裕量: 180 (c ) 39.57
2
T 0.2
自动控制原理考试试卷及答案30套
−b
Im
Re
B2 ω B1
A
−1 N ( A)
0
K
−
b
K = 1, b = 1
题 7 图 (a)
4 s(s + 1)(s + 2)
G ( jω )
题 7 图(b)
8. (15 分)某离散控制系统如下图,采样周期 T=0.2 秒,试求闭环稳定的 K1、K2 的取值 范围。
答案参见我的新浪博客:/s/blog_3fb788630100muda.html
7. (15 分)已知系统结构图如下图所示,试求传递函数
C ( s) E ( s ) 。 , R ( s ) R( s )
答案参见我的新浪博客:/s/blog_3fb788630100muda.html
第 6 页 共 70 页
自动控制原理试卷 A(4)
第 5 页 共 70 页
自动控制原理试卷 A(3)
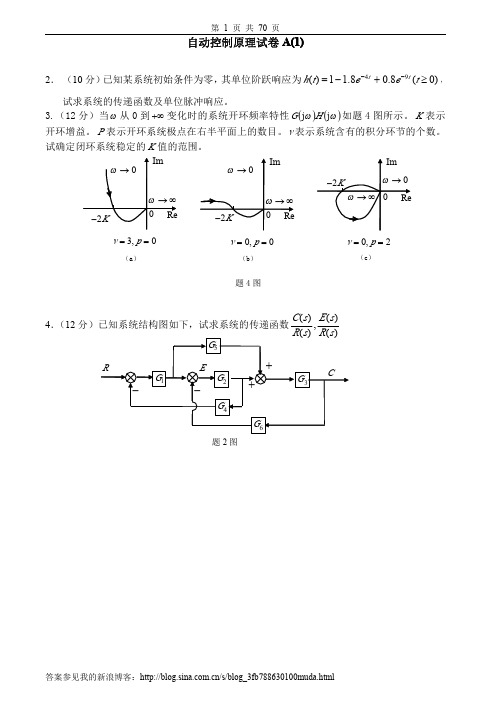
1、 . (10 分)已知某单位负反馈系统的开环传递函数为 G ( s ) =
6 ,试求系统的单位脉 s ( s + 5)
冲响应和单位阶跃响应。 2、 (10 分)已知单位负反馈系统的闭环零点为 -1,闭环根轨迹起点为 0,-2,-3,试确定系 统稳定时开环增益的取值范围。 3、 (10 分)已知系统的结构图如下,试求: (1)闭环的幅相特性曲线; (2)开环的对数幅频和相频特性曲线; (3)单位阶跃响应的超调量σ%,调节时间 ts; (4)相位裕量γ,幅值裕量 h。
答案参见我的新浪博客:/s/blog_3fb788630100muda.html
第 4 页 共 70 页
(1)试写出系统的传递函数 G(s); (2)画出对应的对数相频特性的大致 形状; (3)在图上标出相位裕量Υ。 7. (15 分)题 7 图(a)所示为一个具有间隙非线性的系统,非线性环节的负倒幅相特性与 线性环节的频率特性如题 6 图(b)所示。这两条曲线相交于 B1 和 B 2 两点,判断两个交点处 是否存在稳定的自持振荡。
自动控制原理考研真题试卷
自动控制原理考研真题试卷一、选择题(每题2分,共20分)1、在闭环控制系统中,调节器的输出信号是()A.调节器的输入信号B.调节器的输出信号C.调节器输入信号的函数D.被控对象的输出信号2、在单闭环控制系统中,如果系统开环增益无穷大,则系统可能发生()A.振荡B.失稳C.跟随误差D.超调量3、在系统设计中,为了避免积分饱和,可以采取的措施是()A.采用微分项调节器B.采用积分项调节器C.采用比例-积分-微分(PID)调节器D.采用抗积分饱和调节器4、在反馈控制系统中,如果系统存在干扰,则可以通过()来减小干扰对系统的影响。
A.增加执行机构B.增加测量元件C.增加调节器D.增加滤波器5、在连续控制系统中,如果控制器采用比例调节器,则系统的稳态误差将()A.与输入信号成正比B.与输入信号成反比C.与输入信号的平方成正比D.与输入信号的绝对值成正比6、在离散控制系统中,如果采样周期很短,则系统的稳态误差将()A.很大B.很小C.与采样周期无关D.为零7、在控制系统中,通常采用()来克服扰动对系统的影响。
A.滤波器B.放大器C.调节器D.编码器8、在控制系统设计中,通常采用()来提高系统的稳定性和响应速度。
A.串联校正B.并联校正C.反馈校正D.前馈校正9、在数字控制系统中,通常采用()来处理模拟信号。
A. A/D转换器B. D/A转换器C.模拟滤波器D.数字滤波器10、在控制系统设计中,通常采用()来提高系统的抗干扰能力。
华东师范大学是一所著名的综合性大学,其化学学科在国内具有很高的声誉。
对于想要报考华东师范大学化学专业研究生的同学来说,了解普通化学原理历年真题是非常重要的。
本文将介绍华东师范大学考研普通化学原理历年真题,帮助考生更好地备考。
一、2015年真题1、名词解释本文1)摩尔质量本文2)气体常数本文3)沉淀平衡本文4)氧化还原反应2、简答题本文1)简述拉乌尔定律和亨利定律,并说明它们在描述液体蒸气压中的应用。
浙江大学自动控制原理历年真题精讲及答题技巧(精)

历年试题精讲及答题技巧通过真题的学习和掌握,可以帮助学生把握考试重点。
每年的考点在历年试题中几乎都有重复率,因此,通过对历年真题的把握,可以掌握今年考试的重点。
另外,可以通过对历年真题的学习,把握出题者的思路及方法。
每种考试都有自己的一种固定的模式和结构,而这种模式和结构很难用语言来表述。
而通过认真揣摩历年真题,可以找到这种感觉。
因此,第三部分就真题进行详细的剖析,以便考生掌握命题规律、知悉命题的重点、难点、高频考点,帮助考生迅速搭建该学科考试的侧重点和命题规则。
4.1 真题剖析4.1.1 2007年真题【点评】本年份真题包括以下两种题型:判断题,总计10分;计算题,总计140分;和往年考试题目对比,题型变化很小,其中,题型变化最大的是判断题的出现。
【题目】1【解题】【分析】本题考查控制系统的微分方程描述、以及传递函数的转化。
要求大家会分析常用的物理规律和化学规律以及拉氏变换。
一般常用的模型为电路模型、弹簧模型以及转动模型等。
对于三种模型书上均有例题,大家应仔细理解。
本题考查转动模型,比较少见,要求掌握利用转矩方程构造微分方程。
【题目】2求系统输出y(s)的表达式。
【解题】移动点相加,N2(s)前移,N3(s)前移越过H1、G1得:【分析】本题考查通过结构图的变换列写传递函数。
要求大家掌握书中提供的常用的结构图简化的规则,会进行结构图的等效变换,特别是前移后移的等效变换。
关键点即遵循等效原则。
本题涉及到4个输入,等效变换后还要利用叠加定理。
【题目】3单位负反馈系统的开环传递函数其中K>0, T>0。
试求:(1)闭环系统稳定,K和T应满足的条件;在K-T直角坐标系中画出该系统稳定的区域。
(2)若闭环系统处于临界稳定,且振动频率w=1rad/s。
求K和T的值。
(3)若系统的输入为单位阶跃,分析闭环系统的稳态误差。
解:(1)系统的特征方程为:Routh判据得,系统稳定:由K-T描点,得到曲线:【分析】本题主要考察线性系统稳定性的分析及稳态误差的计算。
浙江理工大学《951自动控制理论》考研专业课真题试卷
(a)
(b)
图2
第 1 页 ,共 3 页
三、(15 分) 已知系统的单位阶跃响应为 c(t) 1 0.2e60t 1.2e10t ,试求:
(1)系统的传递函数;
(2)系统的阻尼比 和自然振荡频率n 。
四、(20 分)给定系统如图 3 所示, K 0 ,试画出系统的根轨迹,并分析增益对系统阻尼特性
图1
G(s) K
二、 (30 分) 系统结构如图 2 所示,
s(Ts 1) ,定义误差 e(t) r(t) c(t) ,
(1) 若希望图(a)中,系统所有的特征根位于 s 平面上 s 2 的左侧,且阻尼比为 0.5,求
满足条件的 K,T 的取值范围。
(2) 求图(a)系统的单位斜坡输入下的稳态误差。 (3) 为了使稳态误差为零,让斜坡输入先通过一个比例微分环节,如图(b)所示,试求出
海天课堂
中国考研专业课辅导知名品牌
浙江理工大学考研专业课真题试卷
951 自动控制理论
2016 年《951 自动控制理论》专业课真题试卷 2017 年《951 自动控制理论》专业课真题试卷 2018 年《951 自动控制理论》专业课真题试卷 2019 年《951 自动控制理论》专业课真题试卷
浙江理工大学
R(s)
E(s)
—
K
C(s)
s(Ts 1)
Hale Waihona Puke 图 3(a)第 1 页 ,共 2 页
图 3(b)
五、(30 分)单位反馈系统对数幅频特性如图 4 所示(最小相位系统)。要求: 1)写出系统的开环传递函数;2)判别系统的稳定性;3)如果系统是稳定的,求 r(t)= t 时的稳 态误差。
(完整版)自动控制原理试题及答案
一、 单项选择题(每题 1 分,共 20 分)1. 系统和输入已知,求输出并对动向特征进行研究,称为(C )A. 系统综合B.系统辨别C.系统剖析D.系统设计2. 惯性环节和积分环节的频次特征在( A )上相等。
A. 幅频特征的斜率B.最小幅值C.相位变化率D.穿越频次3. 经过丈量输出量,产生一个与输出信号存在确立函数比率关系值的元件称为(C ) A. 比较元件 B.给定元件 C.反应元件 D.放大元件 4. ω从 0 变化到 +∞时,延缓环节频次特征极坐标图为( A )A. 圆B.半圆C.椭圆D.双曲线5. 当忽视电动机的电枢电感后,以电动机的转速为输出变量,电枢电压为输入变量时,电动机可看作一个( B )A. 比率环节B.微分环节C.积分环节D. 惯性环节 6. 若系统的开环传 递函数为10,则它的开环增益为( C )2)s(5 s7. 二阶系统的传达函数 G( s) 2 5 ,则该系统是( B )s 2s 5A. 临界阻尼系统B.欠阻尼系统C.过阻尼系统D.零阻尼系统8. 若保持二阶系统的 ζ不变,提升 ωn ,则能够( B )A. 提升上涨时间和峰值时间B.减少上涨时间和峰值时间C.提升上涨时间和调整时间D.减少上涨时间和超调量9. 一阶微分环节 G ( s) 1 Ts ,当频次1时,则相频特征G ( j ) 为( A )TA.45 °B.- 45°C.90 °D.- 90°10.最小相位系统的开环增益越大,其( D )A. 振荡次数越多B.稳固裕量越大C.相位变化越小D.稳态偏差越小11.设系统的特点方程为 D s s 48s 3 17 s 2 16s50,则此系统 ( A )A. 稳固B.临界稳固C.不稳固D.稳固性不确立。
12.某单位反应系统的开环传达函数为: G sk,当 k=( C )时,闭环系1)( s 5)s(s 统临界稳固。
13.设系统的特点方程为 D s 3s 410s 3 5s 2 s 20,则此系统中包括正实部特点的个数有(C )14.单位反应系统开环传达函数为 G ss 2 5 ,当输入为单位阶跃时,则其地点误6s差为( C )s若已知某串连校订装置的传达函数为 G c (s) s1,则它是一种( D ) 15. 10s 1A. 反应校订B.相位超前校订C.相位滞后 —超前校订D.相位滞后校订16.稳态偏差 e 与偏差信号 E(s)的函数关系为(B )ssA. e ss lim E(s)B. e ss lim sE(s)s 0s 0C. e ss lim E( s)D. e ss lim sE(s)ss17.在对控制系统稳态精度无明确要求时,为提升系统的稳固性,最方便的是( A )A. 减小增益B.超前校订C.滞后校订D.滞后 -超前 18.相位超前校订装置的奈氏曲线为( B )A. 圆B.上半圆C.下半圆 °弧线 开环传达函数为 G(s)H(s)= 3 K, 则实轴上的根轨迹为( C )19.( s 3)sA.( - 3,∞ )B.(0,∞ )C.(- ∞, - 3)D.( - 3,0)20.在直流电动机调速系统中,霍尔传感器是用作( B )反应的传感器。
自控原理习题答案(全)
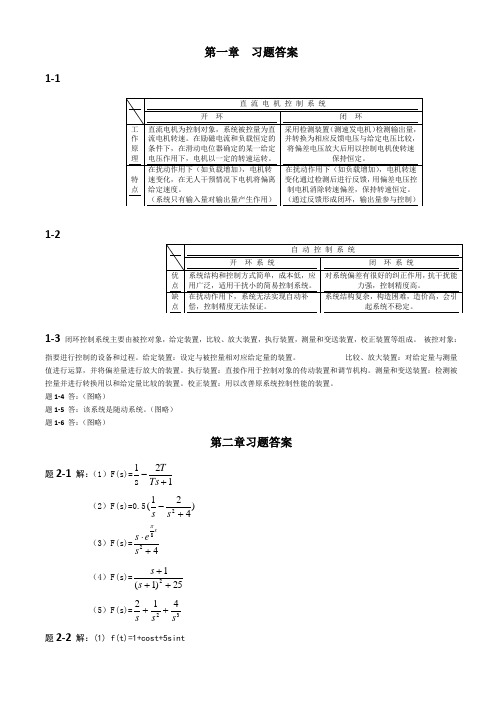
第一章 习题答案1-11-21-3 闭环控制系统主要由被控对象,给定装置,比较、放大装置,执行装置,测量和变送装置,校正装置等组成。
被控对象:指要进行控制的设备和过程。
给定装置:设定与被控量相对应给定量的装置。
比较、放大装置:对给定量与测量值进行运算,并将偏差量进行放大的装置。
执行装置:直接作用于控制对象的传动装置和调节机构。
测量和变送装置:检测被控量并进行转换用以和给定量比较的装置。
校正装置:用以改善原系统控制性能的装置。
题1-4 答:(图略)题1-5 答:该系统是随动系统。
(图略) 题1-6 答:(图略)第二章习题答案题2-1 解:(1)F(s)=12s 1+-Ts T(2)F(s)=0.5)421(2+-s s(3)F(s)=428+⋅s es sπ (4)F(s)=25)1(12+++s s(5)F(s)=32412ss s ++ 题2-2 解:(1) f(t)=1+cost+5sint(2) f(t)=e -4t(cost-4sint) (3) f(t)=t t t te e e 101091811811----- (4) f(t)= -t t tte e e ----+-3118195214 (5) f(t)= -t te e t 4181312123--+++ 题2-3 解:a)dtduu C R dt du R R c c r 22111=++)( b)r c c u CR dt du R R u C R dt du R R 1r 12112111+=++)( c) r r r c c c u dtdu C R C R dtu d C C R R u dtdu C R C R C R dtu d C C R R +++=++++)()(1211222121122111222121 题2-4 解:a) G(s)=1)(212++s T T sT (T 1=R 1C, T 2=R 2C )b) G(s)=1)(1212+++s T T s T (T 1=R 1C, T 2=R 2C )c) G(s)= 1)(1)(32122131221+++++++s T T T s T T s T T s T T (T 1=R 1C 1, T 2=R 1C 2, T 3=R 2C 1, T 4=R 2C 2 ) 题2-5 解:(图略) 题2-6 解:33)(+=Φs s 题2-7 解:a) ksf ms s +-=Φ21)(b) )()()(1))(1)(()(21221s G s G s G s G s G s +++=Φc) )()(1)())()(()(31321s G s G s G s G s G s ++=Φd) )()()()(1))()()(323121s G s G s G s G s G s G s -+-=Φe) G(s)=[G 1(s)- G 2(s)]G 3(s)f) )()()()()()()()()()(1)()()()()(43213243214321s G s G s G s G s G s G s G s G s G s G s G s G s G s G s +-++=Φg) )()()()()()()()(1)()()()(43213212321s G s G s G s G s G s G s G s G s G s G s G s -+-=Φ题2-8 解:102310)1()()(k k s s T Ts k k s R s C ⋅++++⋅=1023101)1()()(k k s s T Ts k k s N s C ⋅++++⋅=1023102)1()()(k k s s T Ts s T k k s N s C ⋅++++⋅⋅⋅= 题2-9 解:)()()()(1)()()(4321111s G s G s G s G s G s R s C +=)()()()(1)()()(4321222s G s G s G s G s G s R s C +=)()()()(1)()()()()(432142121s G s G s G s G s G s G s G s R s C +=)()()()(1)()()(4321412s G s G s G s G s G s R s C +=题2-10 解:(1)3212321)()(k k k s k k k s R s C +=3212032143)()()(k k k s s G k k k s k k s N s C +⋅+=(2) 2140)(k k sk s G ⋅-= 题2-11 解:122212211111)()1()()(z z s T s T T C s T T s T k k s s m m d e L ⋅++⋅+++⋅=ΘΘ (T 1=R 1C, T 2=R 2C, T d =L a /R a , T m =GD 2R a /375C e C m )第三章 习题答案3-1. s T 15=(取5%误差带) 3-2. 1.0=H K K=2 3-3.当系统参数为:2.0=ξ,15-=s n ω时,指标计算为:%7.52%222.0114.32.01===-⨯---e eξξπσs t ns 352.033=⨯==ξωs t n p 641.02.01514.3122=-⨯=-=ξωπ当系统参数为:0.1=ξ,15-=s n ω时,系统为临界阻尼状态,系统无超调,此时有:st ns 95.057.10.145.67.145.6=-⨯=-=ωξ3-4.当110-=s K 时,代入上式得:110-=s n ω,5.0=ξ,此时的性能指标为:%3.16%225.0114.35.01===-⨯---e eξξπσs t ns 6.0105.033=⨯==ξωs t n p 36.05.011014.3122=-⨯=-=ξωπ当120-=s K 时,代入上式得:11.14-=s n ω,35.0=ξ,此时的性能指标为:%5.30%2235.0114.335.01===-⨯---e eξξπσs t ns 6.01.1435.033=⨯==ξω由本题计算的结果可知:当系统的开环放大倍数增大时,其阻尼比减小,系统相对稳定性变差,系统峰值时间变短,超调量增大,响应变快,但由于振荡加剧,调节时间不一定短,本题中的调节时间一样大。
浙大控制系自动化考研复试题目
浙大控制系自动化考研复试题目【问得最多的】1、P,I,D的意义2、工控机与pc的区别3、用english表达控制系统组成部分4、如何设计控制系统5、建模的两种方法6、设计一个系统测量煤气热值7、CSMA/CD的原理8、工控和办公自动化的区别9、以太网的核心10 为什么要读研11 稳定裕度的概念(幅值裕度、相位裕度)12 计算机控制系统有哪些环节13 在离散控制系统中控制器是怎样实现的1组面试的题目是1、用英文讲一些专业的课程2、1分钟自我介绍3、如果一个大工程给你,你如何计划4、一个斜坡输入如何跟踪一个系统,让它无余差?5、你参加过哪些科研英文自我介绍DSP专用芯片和一般MCU性能之比较单片机编程应用于实时系统的时代已过,现在的潮流是应用于什么系统?(嵌入式系统)简述前馈的应用场合,如果不能测干扰能用前馈吗串级有几个执行器?副回路设定值从哪里来?中断有什么作用?一个煤气炉如何建模谈谈对dcs系统的理解一组1.自我介绍,用英语就自我介绍中的一个问题展开2.下水道井盖为什么是圆的,下水道为什么是圆柱的呢?3.今年夏天北方干旱,淮河一带发大水,怎么解决这个问题4.想装热水器怎么用最简单的方法确定用煤气合算还是用电的合算5.怎么用计算机控制系统控制水位,其中穿插了检测水位的方法等小问题1、方块图和信号流程图的比较,流程图不能用在什么场合2、翻译一段文章3、时滞系统如何控制,预估和模控制的比较4、稳态是怎样的?5、尽可能说出你知道的先进控制方法(鲁棒控制、自适应控制、预测控制等)1、PID中P,I,D分别什么意思,控制作用什么?2、分程控制定义举例3、计算机控制系统的组成4、计算机控制系统的好坏标准1、设计控制系统要考虑那些问题2、简单说说选择控制系统,并与单回路比较3、 0~20mA的一般能否改成两线制4、系统建模有那些方法1、你对你以后的研究生阶段有什么打算?2、你对嵌入式系统有什么了解?3、学了控制原理以后,觉得控制原理的核心是?4、控制阀有哪几种特性?5、觉得控制理论可以运用到那些方面?6、最后是翻译一段文章,应该是取自一篇论文的,不是太懂1、谈谈对本专业的认识2、举一个日常生活中自稳定的例子3、如何检测一个不能直接检测的参数4、说出人口模型建立和化工过程模型建立的相同点和不同点5、说出计算机控制系统的结构6、说出单回路控制系统的结构1、系统能控性的概念2、控制系统稳定性判定方法3、执行器的两个机构的选择4、说一下鲁棒控制5、说说dcs和fcs的异同(fcs用的智能化仪表,全数字通信,而dcs则需要传输模拟量,用模拟表,相对来说比较土)1 处理高阶系统一般用什么方法,或者说用什么模型2 建模有什么方法,具体点说.主要是实验法要说得比较清楚3 知道分程控制吗?说一说原理4 说说你知道的先进控制有哪些5 判断系统稳定有什么方法还好吧,一些比较常识的东西2组面试的题目是1、用英文讲一些专业的课程2、1分钟自我介绍3、如果一个大工程给你,你如何计划4、一个斜坡输入如何跟踪一个系统,让它无余差?5、你参加过哪些科研英文自我介绍DSP专用芯片和一般MCU性能之比较单片机编程应用于实时系统的时代已过,现在的潮流是应用于什么系统?(嵌入式系统)简述前馈的应用场合,如果不能测干扰能用前馈吗串级有几个执行器?副回路设定值从哪里来?中断有什么作用?一个煤气炉如何建模谈谈对dcs系统的理解2组1.自我介绍,用英语就自我介绍中的一个问题展开2.下水道井盖为什么是圆的,下水道为什么是圆柱的呢?3.今年夏天北方干旱,淮河一带发大水,怎么解决这个问题4.想装热水器怎么用最简单的方法确定用煤气合算还是用电的合算5.怎么用计算机控制系统控制水位,其中穿插了检测水位的方法等小问题1、方块图和信号流程图的比较,流程图不能用在什么场合2、翻译一段文章3、时滞系统如何控制,预估和模控制的比较4、稳态是怎样的?5、尽可能说出你知道的先进控制方法(鲁棒控制、自适应控制、预测控制等)1、PID中P,I,D分别什么意思,控制作用什么?2、分程控制定义举例3、计算机控制系统的组成4、计算机控制系统的好坏标准1、设计控制系统要考虑那些问题2、简单说说选择控制系统,并与单回路比较3、 0~20mA的一般能否改成两线制4、系统建模有那些方法1、你对你以后的研究生阶段有什么打算?2、你对嵌入式系统有什么了解?3、学了控制原理以后,觉得控制原理的核心是?4、控制阀有哪几种特性?5、觉得控制理论可以运用到那些方面?6、最后是翻译一段文章,应该是取自一篇论文的,不是太懂1、谈谈对本专业的认识2、举一个日常生活中自稳定的例子3、如何检测一个不能直接检测的参数4、说出人口模型建立和化工过程模型建立的相同点和不同点5、说出计算机控制系统的结构6、说出单回路控制系统的结构1、系统能控性的概念2、控制系统稳定性判定方法3、执行器的两个机构的选择4、说一下鲁棒控制5、说说dcs和fcs的异同(fcs用的智能化仪表,全数字通信,而dcs则需要传输模拟量,用模拟表,相对来说比较土)1 处理高阶系统一般用什么方法,或者说用什么模型2 建模有什么方法,具体点说.主要是实验法要说得比较清楚3 知道分程控制吗?说一说原理4 说说你知道的先进控制有哪些5 判断系统稳定有什么方法黄志尧老师王宁老师兴高老师首先,非常感面试我的黄志尧老师王宁老师兴高老师以及一位我不认识的女老师,给了我一个发挥的机会.进去先谈了一下毕设导师以及报的专业的问题,黄老说我从智能改成双控可能有问题.急了我一下.第一个是王宁老师读e文,容是我喜欢的风格,人与系统的类比.算是比较顺利.第二个纸条翻译,是飞行器的鲁棒+监督控制,我不太喜欢翻译,有几个词翻的不行,不太顺畅,被稍微bs了一把,但没什么压力.第三个是黄老的两道运放电路题,由于电子设计竞赛的时候做了很多,所以马上就给出一题了答案,受到几个老师的表扬^_^,另外一题和第一题的负反馈外部连接完全一样,但运放的+-换了,正反馈,这题我慌了一下,我知道是正反馈接法一般输出是要飘的,但是...一时犹豫,答错了.又问运放电路分析的前提(相当于是在提示我),我都答了.后来完后还跟黄老说了下这个电路,唉.后面两道一道是PID的,问的挺细的,不过没问题,黄老问我I为什么降低稳定性,我从频域角度回答的,说它使系统相位裕量减小,黄老居然假装说不懂,要我另给它解:(一道是线性系统以及非线性系统常见的稳定性分析方法,我忘了非线性里的描述函数法,王老师再三逼问,我都没想起来.后来结合我的毕设问了系统辨识的常见方法,我基本上把各大门派的功夫都答全了.当然讲到了R.A.Fisher的极大似然参数估计原理,没想到黄老紧接着就问到一个什么模式识别里的fisher规则还是什么的,忘了,我也就知道有个fisher信息阵,并且还不甚清楚,直接回答说不知道.郁闷.完了,就这样完了.后来去看分好像老师给了我本组最高.再次几位老师成全了俺.我是老楼412的,我们组只有两个是自己系的刚到新楼分组就觉得紧,心跳应该有100多。