电磁导向式差速型自动导向车导向控制仿真系统
自动导向车的应用原理
自动导向车的应用原理概述自动导向车(AGV)是一种能够自主导航、避开障碍物并进行货物运输的智能设备。
AGV在物流、仓储和生产领域得到广泛应用,大大提高了生产效率和工作安全性。
本文将介绍AGV的应用原理和工作流程。
AGV的应用原理AGV的应用原理包括导航系统、感知系统和控制系统三个方面。
下面将详细介绍各个方面的工作原理。
导航系统AGV的导航系统是AGV能够自主导航的核心。
导航系统通常采用激光、红外线或者视觉导航等技术。
其中,激光导航是最常用的一种技术。
激光导航系统通过激光传感器扫描环境,生成环境地图,并通过算法进行路径规划,以实现自主导航和定位。
感知系统AGV的感知系统用于感知周围环境,包括检测障碍物、识别货物和判断工作环境等功能。
感知系统通常包括摄像头、超声波传感器、红外线传感器等传感器。
通过实时采集和分析传感器数据,AGV能够智能地避开障碍物、准确地识别货物,并根据环境变化做出相应的动作。
控制系统AGV的控制系统是AGV的大脑,用于实现对AGV的控制和调度。
控制系统通常由主控制器、电机控制器和通信模块组成。
主控制器负责接收导航系统和感知系统的信息,根据预设的算法对AGV进行控制和规划路径。
电机控制器用于控制AGV的电机,实现运动控制。
通信模块用于与其他设备进行通信,如与仓库管理系统进行数据交互。
AGV的工作流程AGV的工作流程可以概括为以下几个步骤:1.初始化:AGV开始工作之前,需要进行初始化,包括地图加载、路径规划等工作。
2.导航:AGV通过激光导航系统进行定位,并根据路径规划算法确定行驶路径。
3.感知:AGV通过感知系统实时感知周围环境,包括检测障碍物和识别货物等。
4.控制:AGV根据导航系统和感知系统的信息,通过控制系统实现对AGV的控制和调度。
5.货物运输:AGV根据任务指令,准确地识别货物,并将货物从起始位置运输到目标位置。
6.通信:AGV通过通信模块与其他设备进行数据交互,如与仓库管理系统进行货物追踪和状态更新。
AGV数学模型的建立及控制分析
l( + 口
R
)
忐
忐
由于 2电机 的参数 相 同 ,所 以令
( 8 )
( 9 )
在 AC E 中 D
t n 。CE =t n - D a aa E
=
L R m k =k k ( 0 ) = =T ,L R=  ̄ 6 r
假 设 △ 是 一段 很 短 的时 间 ,此 时 的偏 移 角 为
D 的 2倍 ,所 以 图 5的 模 型 更 适 用 于 弯 道 行
若 V 和 V 在该时间段 内大小方向均没有发生 改 变 ,则 △ 也 足够 小 ,有
Ao , l
由此可 得 A V左 右 2驱 动 轮 的线 速 度 与 电机 G 控 制 电压 的关系 为
tn a 在 AA O B中
.
㈩
忐
() 1 0
忐 n
D
—
—
( 1
0 引 言
自动导 引 车 A V ( uo t uddV h l) G A t e G ie e i e ma d c 是 一 种无 人 驾 驶 搬 运 车 ,是 应 用 日益 广泛 的 一 种
自动 化 物料 搬 运设 备 ¨。它 可 以按 照 监 控 系 统 下
达 的指 令 ,根 据 预 先 设 计 的 程 序 及 车 载 传 感 器
1 3 AG 传 递 函数与 结构 图 . V 对 式 ( ) 和式 ( ) 进行 拉式 变换 得 3 4
相等 ,即 U =U =U 。 c
A V在 运行 中受 到 外 部 扰 动会 出 现 偏 离 规 定 G 行驶 方 向 的 情 况 ,即 出 现 偏 移 距 离 和 偏 移 角 度 。
b ss te m o e ’ S d n m i tu t e fg r s d d e The M alb—i l to ft e m o l p n lo yse i c rid a i h d l y a c sr cur u e i e uc d. i ta smu ai n o h de’ o e o p s tm s a re S o t O t tt e ain bewe n i p t n ut t fa o tc g de e ce sfg r d o t u S ha her l t t e n u sa d o puso utma i ui d v hilsi u e u ,wh c st e s me a he p e o i i h i h a st r — d ce es ls I d to i td r ut. n a di n, t e ma c i g c nr l l o t i h r h n o to ag r hm fa o tc u d d v h ce s de in d O s t c nto h i o utma i g i e e il s i sg e S a o o r lt e
差速转向的农用自动引导小车控制系统设计_尚婕
用 AGV 控制系统. 针对目前电磁导引式 AGV 的导引线上的信号频率都是固定的情况,提出了一种可编程导引系统,可任
意更改导引线上的导引频率,使 AGV 的控制更加灵活. 航向控制采用计算量小的分区 PID 算法,提高了 AGV 行走精度. 设
计的差速转向的农用 AGV 已经成功应用于某试验田.
关键词: 自动引导小车; 差速转向; 分区 PID; 控制系统
( School of Electronic and Information,Jiangsu University of Science and Technology,Zhenjiang Jiangsu 212003,China)
Abstract: As a common platform for agricultural operations,agricultural automatic guided vehicle( AVG) is a kind of robert that is particularly designed for a specific application environment. It is very important in agricultural automation. According to the characteristics of agricultural AGV,a kind of differential turning agricultural AGV control system is designed based on ARM7 core and embedded μC / OS-II operating system. For the current,the signal frequency of electromagnetic guidance line is fixed. A programmable guidance system is put forward and implemented. It can guide any changes to the guide line frequency and bring more flexible control of AGV. Heading control by PID partitioning algorithm is used to improve the accuracy of AGV travel. The design of differential steering agricultural AGV is applied to test field successfully. Key words: automatic guided vehicle; differential steering; partition PID; control system
电磁脉冲阀分类

电磁脉冲阀分类1. 引言电磁脉冲阀是一种常见的控制元件,广泛应用于工业自动化系统中。
它通过控制电磁力的作用,实现对流体介质的开关和调节。
本文将对电磁脉冲阀进行分类,包括两个主要方面:结构分类和工作原理分类。
2. 结构分类电磁脉冲阀的结构可以分为多种类型,下面将介绍其中的几种常见结构。
2.1 单向电磁脉冲阀单向电磁脉冲阀是最基本的电磁脉冲阀结构,它由电磁铁、阀芯和阀体组成。
当电磁铁通电时,产生的电磁力使阀芯与阀体之间的密封面分离,流体介质得以通过。
当电磁铁断电时,弹簧力将阀芯重新压紧到阀体上,实现关闭状态。
2.2 双向电磁脉冲阀双向电磁脉冲阀在单向电磁脉冲阀的基础上增加了一个阀芯,使其能够实现双向流动。
当其中一个阀芯打开时,另一个阀芯关闭,实现了流体介质的单向流动。
当两个阀芯都关闭时,流体介质停止流动。
2.3 多通道电磁脉冲阀多通道电磁脉冲阀是指具有多个通道的电磁脉冲阀,可以同时控制多个流体介质的开关和调节。
它通常由多个单向电磁脉冲阀组合而成,每个通道独立控制。
2.4 比例电磁脉冲阀比例电磁脉冲阀是一种可以根据输入信号的大小,调节流体介质的流量的电磁脉冲阀。
它通过改变电磁铁的通电时间来控制阀芯的开启程度,从而实现对流体介质流量的精确调节。
3. 工作原理分类电磁脉冲阀的工作原理可以分为两类,下面将介绍其中的两种常见原理。
3.1 直动式电磁脉冲阀直动式电磁脉冲阀是指电磁铁直接作用于阀芯的一种电磁脉冲阀。
当电磁铁通电时,产生的电磁力直接作用于阀芯,使其与阀座分离,流体介质得以通过。
当电磁铁断电时,弹簧力将阀芯重新压紧到阀座上,实现关闭状态。
3.2 导向式电磁脉冲阀导向式电磁脉冲阀是指电磁铁通过改变阀芯的导向来控制流体介质的流动的一种电磁脉冲阀。
当电磁铁通电时,改变阀芯的导向,使流体介质得以通过。
当电磁铁断电时,阀芯的导向恢复到原来的状态,实现关闭状态。
4. 应用领域电磁脉冲阀广泛应用于各个领域,下面将介绍其中的几个典型应用。
物流仿真系统实验

一、实验目的和要求(一)实验目标本实验课程是物流管理专业实践类课程,具有较强的操作性,是物流专业的学生需要掌握的重要内容之一,运用仿真软件构建系统仿真模型,有助于学生加深对物流系统的结构、功能以及物流系统分析与优化等方面知识的了解,对学生物流行业的认知及其实务操作具有指导作用。
通过仿真软件的操作,加速学生对专业知识的理解与基本技能的应用,提高学生在专业学习的主动性,思考能力,有助于提高学生解决实际问题的能力。
(二)实验要求1、对物流系统仿真理论知识有比较全面的了解。
2、熟练操作实验指定软件RaLC乐龙软件。
3、掌握部件生成器、分拣、分流装置、入库和出库控制设备的参数设定、系统运行状态显示以及仿真模型的视频输出方法、初级作业指示文件的制作等基本仿真操作方法.4、掌握如何根据实际单证数据进行现实模拟,如何利用仿真软件的分析和优化功能对系统进行分析和优化。
本实验课程是一种综合性的实验,以实验室模拟操作为主,教师课前做好实验设计,模拟实际操作环境,明确每次实验的内容及目的,紧密结合理论教学内容。
每个实验项目结束要求学生撰写实验报告。
所有实验项目结束后要求撰写一份实训总结报告。
本实验以教师指导和学生练习相结合的方式进行。
指导教师在本实验的每个环节中首先进行实验讲解和实验指导,然后学生自己在实验室中进行模拟操作。
实验以集中指导和学生分散练习相结合的形式进行。
二、实验内容本实验教程共分三篇:第一篇主要介绍物流系统仿真的基本知识和目前常用的几种仿真软件。
第二篇为基础实验部分,主要介绍如何运用RaLC(乐龙)仿真软件“RaLC-Pro”构建物流配送中心的演示模型,共分为7个实验,由简及繁。
第三篇为高级实验部分,介绍如何利用RaLC(乐龙)仿真软件“RaLC-Brain”构建物流配送中心的模拟模型。
具体实验内容如下:实验一:分拣、分流功能模拟通过对通过型物流中心的例子来学习了解分拣、分流的控制方法,了解模型中的部件生成器、传送带、部件消灭器、智能人、笼车等设备的功能和特点,加深学生对分流点的设置规则及控制方法的掌握,并对通过型物流中心有一个整体的了解.实验二:仓储型物流中心模拟通过对仓储型物流中心模型的构筑,学习了解自动立体仓库、装货平台、卸货平台、传送带、机器人、托盘供应器等设备的功能特点,加深对托盘上货物的堆码规则及控制方法的了解,并对仓储型物流中心有一个更深刻的认识。
城轨概论1-2(2)

A.直流电机 B.交流电机 C.直线电机 2.单轨的线路是( )
A.地面线 B.高架线 C.地下线
按悬浮机理分为常导电磁悬浮和超导电动铁有同性相斥和异性相吸两种形式, 磁悬浮列车也有两种相应的形式:一种是 利用磁铁同性相斥原理而设计的电磁运行 系统的磁悬浮列车;另一种则是利用磁铁 异性相吸原理而设计的电动力运行系统的 磁悬浮列车。
(1)同性排斥原理
异性相吸原理
1.2 城市轨道交通的类型 (2)
上节回顾
一、城市轨道交通的主要类型 城市轨道交通主要有7类:地铁、轻轨系统、单轨 交通、有轨电车、磁悬浮系统、自动导向轨道系 统、市域快速轨道系统
二、地铁及其应用 地铁概念、运量(3-6万人次/h)、优缺点、施工 方式
三、轻轨系统及其应用 概念、运输能力(1-3万人次/h 中运量)及特点
不同类型的城市轨道 交通系统
学习目标
了解城市轨道交通其余五大类的定义 了解各类城市轨道交通的区别和应用
1.概述
一、单轨交通
单轨又称独轨,指通过单一轨道梁支撑车厢并提 供导引作用而运行的轨道交通系统。
跨座式
悬挂式
重庆跨座式单轨交通
悬挂式单轨列车
日本神奈川湘南的 悬挂式单轨列车
2.特点
轨道大小 —— 采用一条大断面轨道,车体比轨道宽 线路架设方式 —— 高架线 导向方式 —— 导向轨导向 客流量 —— 中容量 运行速度 —— 可达30~35Km/h 车轮材料 —— 橡胶轮 轨道材料 —— 跨坐式:预应力混凝土制作
最早(1963年)出现在美国,曾被称为“水平电 梯”、“空中巴士”、“快速交通”,后来,日 本和法国进行了进一步改造和发展
城市轨道交通概论课本总结
《城市轨道交通概论》知识点梳理第一章绪论1。
1城市轨道交通的概念与特点1.城市轨道交通的定义:采用专用轨道导向运行的城市公共交通客运系统.2.城市轨道交通的分类:地铁系统、轻轨系统、单轨系统、有轨电车、磁浮系统、自动导向系统、市域快速轨道交通系统。
3。
城市轨道交通的优缺点优点:①容量大②运行准时快速③能耗低④安全性高⑤无污染⑥用地省缺点:①城市轨道交通建设投资巨大②运营成本高昂,经济效益有限③建设周期长(一条线路的建设短则几年,长则可达十余年之久)④线路和车站均为永久性结构,一旦建成后基本没有调整的可能性。
4.了解轨道交通发展几个常识:⑴中国第一个修建地铁的城市:北京(1969)⑵世界第一个修建地铁的城市:伦敦⑶中国首条铁路—吴淞铁路⑷中国第一条自主建设的铁路—京张铁路⑸中国自建并保存下来的第一条铁路- 唐胥铁路⑹美国是世界上拥有地铁最多的国家。
(7)莫斯科地铁是世界上客运量最大的地铁.①线路运能,即交通容量,也就是线路输送客流的最大能力,其指标是断面单向每小时最大的乘客通过量。
②路权,指城市轨道交通运行线路与其他交通的兼容程度。
第二章城市轨道交通的类型2.1 概述城市轨道交通的分类:地铁、轻轨、单轨、现代有轨电车、自动导向系统、磁浮交通系统、市域快速轨道交通系统.2。
2地铁1.地铁的定义:轴重相对较重,单方向输送能力在每小时三万人次以上的城市轨道交通系统。
可以修建在地下或采用高架方式2.地铁的特点:①容量大②速度快、可靠性强③安全性高④准时⑤运输成本低⑥用地省(不占用城市土地) ⑦建设成本高⑧出行距离长,客运需求较大⑨污染少、噪声小(特点包含优缺点,其实回答轨道的特点)3。
地铁系统的基本车型为A型车、B型车、直线电机B型车(Lb型车)三种。
A型车车辆的基本宽度为3000mm(3m),B型车及直线电机B型车车辆的基本宽度为2800mm(2.8m)。
2。
3轻轨1。
轻轨的定义:轴重较轻,每小时客运量为1万—3万人次的轨道交通系统.2。
AGV磁导航设计方案

AGV搬运机器人设计方案AGV即自动导向小车(Automated Guided Vehicle)被作为搬运机器人广泛使用,应用于自动化仓储系统、柔性搬运系统和柔性装配系统等物流系统。
AGV 是以蓄电池作为电源,用某种导航方式控制其运行路线的自动化智能搬运设备。
AGV 具有良好的柔性和较高的可靠性,能够减少工厂对劳动力的需求,提高产品设备在运输中的安全性且安装容易,维护方便。
在AGV 的应用环境中,往往由多台AGV 组成自动导向小车系统,该系统是由AGV、导引系统、管理系统、通信系统、停靠工位以及充电工位等组成的自动化AGVs 系统。
AGVs 的上位机管理系统通过通信系统与系统内的AGV 通信,优化AGV 的作业过程、控制AGV 的运行路线、制定AGV 的搬运计划和监控AGV 的运行状态。
AGVs 易于和其他自动化系统集成,容易扩展。
1、AGV导引方式1)视觉导航视觉导引是在AGV 的运行路径上设置导向标线,通过装在AGV 上的摄像机系统动态地获取导向标线图像,计算AGV 相对于标线的距离和角度偏差,从而控制AGV 沿着标线运行的导引方式。
该种导引方式精度较高,路径变更容易,但对地面洁净度有一定要求,同时成本相对较高。
2)磁导航磁导航被认为是一项非常有应用前景的技术,主要通过测量路径上的磁场信号来获取车辆自身相对于目标跟踪路径之间的位置偏差,从而实现车辆的控制及导航。
磁导航具有很高的测量精度及良好的重复性,磁导航不易受光线变化等的影响,在运行过程中,磁传感系统具有很高的可靠性和鲁棒性。
磁条一旦铺设好后,维护费用非常低,使用寿命长,且增设、变更路径较容易。
2、AGV组成单元磁导航AGV 系统的技术构成如图1所示。
主要包括导向单元、驱动单元、车体、移载单元、供电单元、安全辅助单元,站点识别单元,通讯单元和主控单元。
其中导向单元、驱动单元和主控单元是AGV 技术的核心技术。
图1 磁导航AGV 系统技术构成图1)导向单元导向单元采用磁导航传感器,安装在AGV 车体前方的底部,磁导航传感器利用其内置的6个采样点,能够检测出磁条上方一定程度的微弱磁场,每一个采样点都有一路信号对应输出,当采样点采集到磁场信号时,该路信号就会输出低电平,而没有采集到磁场信号的信号输出则为高电平。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电磁导向式差速型自动导向车导向控制仿真系统上海交通大学 陆朝红 王 冰 王 超 摘 要:针对电磁感应式差速型自动导向车(AG V)的导向控制系统,提出一个相对简化的运动学参考模型,并以此作为AG V导向控制系统设计的基础,利用M AT LAB/S imulink建立了控制仿真系统。
通过该仿真系统可以验证诸如PI D、模糊控制等AG V运行控制方式,检测AG V在多种干扰信号下的运行特性,以及测试由AG V 车体结构上的变化所带来的影响。
另外,在S imulink仿真环境中,可以直接通过图表方式监测任意状态变量的变化趋势,参数的更改相当便捷。
试验证明,由该仿真系统模拟的参数比较接近实际监测到的数据,对于实际小车的控制具有一定的参考价值,为今后AG V控制系统的设计提供了依据。
关键词:自动导向车;仿真系统;非线性系统; Abstract:A simulation system for the control of wire2guided and differential steering AG V is developed based on a sim plified AG V kinematics and the M AT LAB/S imulink I DE1With this system,kinds of control m odes such as PI D and fuzzy m odes could be verified,further the running characteristics under different inter feres and the in fluence caused by the body change could be test2 ed1With the S imulink I DE,any status variables can be m onitored by display m odule,and the related parameters can als o be ad2 justed easily1Experiments prove that the data provided by this simulation system is close to the practical one,and this system is useful for actual AG V control and contributes to future AG V design and im provement1 K ey w ords:automatic guided vehicle;simulation system;non2linear system 自动导向车(AG V)是一种使用日益广泛的自动化物料搬运设备,而对于单个AG V的导向控制是整个AG V系统能否正常运行的关键。
目前AG V 主要有2种类型的:差速型与舵轮型,其差别主要体现在电机控制组合方式不同,因此对控制系统的要求也会有所不同。
舵轮型AG V是由作为导向电机的位置控制器和作为运行驱动电机的速度控制器组成,但一般对速度控制器的要求不高。
由于其运行速度对运行特性有影响,对于同一辆AG V,速度增加时,系统动态稳定性变差[2],因此,只要导向系统满足AG V最高速度运行时的响应要求,也就可以满足其他状态下的响应要求。
另外,负载变化的干扰对舵轮型AG V的导向系统影响较小,这对其运行导向系统的设计和调试很有利。
差速型AG V的2台电机都属于速度控制器。
通过驱动2电机使AG V运行,同时根据导向偏差信号调整2电机的转速来纠正车体的运行趋势。
负载和干扰对2电机的影响一般不同,造成2电机的动态特性不一致,给控制带来了诸多不定因素。
为进一步研究和分析影响差速型AG V控制系统稳定性的多种因素,需要有针对性地建立一个合理的AG V模型及其仿真系统,从而可以事先暴露出设计中可能存在的隐患。
该仿真系统利用MAT2 LAB中的Simulink图形化工具包较好地处理了AG V 运动模型中的非线性特性[1]。
1 电磁导向式差速型AGV车体运动学模型的建立 在建立电磁式差速型AG V模型的过程中发现,行驶路面的状况、载荷变化(尤其是重载)、机械结构、控制电路(例如大电流驱动时导致蓄电池输出端电压的压降)等的不确定性,给模型的建立带来了很大的难度。
这里忽略一些次要的干扰变量,—31—《起重运输机械》 2002(11)提出了一个相对简化的控制模型。
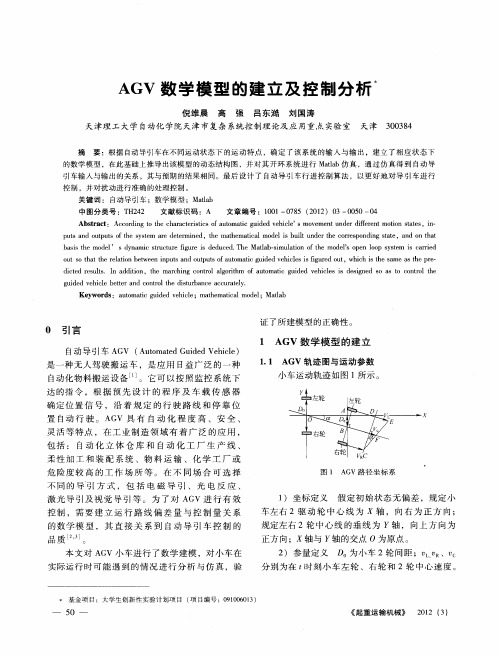
本文所研究的AG V 为电磁导向式差速型4轮结构,后2轮由2个独立的伺服直流电机驱动,前2轮为万向轮,如图1所示。
图1 AG V 运动示意图以ω1,ωr 和ω分别表示左、右驱动轮转速以及不打滑情况下AG V 车体的转速;θ为车体转角;R ,L 分别为驱动轮半径及2驱动轮的中心距;D 为探头中心距2驱动轮中心连线的垂直距离。
则有:(1)车体转动角速度ω=(ωr -ωl )R/L(2)车体的转动角度(相对参考坐标系x 轴)θ=θ0+∫tωdt式中 θ0———车体初始角度(3)车体的速度:O 点瞬时线速度v o =(ωr +ωl )R/2O 点x 方向速度分量v o x =v o cosθO 点y 方向速度分量v o x=v o sin θ(4)车体2驱动轮中心O 点的位置坐标x 0=x o0+∫tvo x d t (1)y 0=y o0+∫t 0v o y d t(2)式中 x o0,x o0———O 点的初始位置坐标(5)探头中心C 点位置坐标x c =x o +D cosθy c =y o +D sin θ(6)探头中心C 和2驱动轮中心O 点距预定轨迹的偏差距离 处于直线段(设置为与x 轴重合)时ΔE c =y c(3)ΔE o =y o(4) 处于圆弧段[设置圆弧中心为(0,r )]时ΔE ′c =r -x 2c +y 2c ΔE ′o =r -x 2o +y 2oC 点和O 点会出现同一时刻处于不同路段的情况,本文只考虑同处直线段的情况(见式3、4)。
从上述运动方程可以看出,由于存在三角函数、积分及开平方根等运算(见式1、2等),AG V 不是线性系统,但只要知道了初始条件以及2驱动轮的瞬时转速ωr 、ωl 、,就可以求出AG V 车体在任何时刻的运动状况:运行速度v o 、转速ω以及转过的角度θ,包括探头的位置和偏差。
所用的数学计算模块如积分、微分、三角函数等在Simulink 中可以找到,因此利用Simulink 中的工具包[3][5]就可以建立AG V 车体运动学仿真模块(见图2)。
这是一个子系统模块,利用其输出变量,并经过另一个转换模块后,就可以得到探头位置偏差输出。
图2 AG V 车体运动学模块为了方便今后同类型但不同结构的AG V 的仿真,在电机输出转速到AG V 车体的v -in 和ω-in 之间设有1个电机到驱动轮转换模块(见图7),其作用是将2个驱动电机输出轴上的转速转换为图1所示AG V 车体上O 点处的瞬时线速度v o 和车体的转速ω。
对于不同的车体结构,可以通过修改该转换模块调整相应的参数。
2 AGV 驱动电机仿真模型的建立电磁导向式差速型AG V 是根据导向偏差信号,通过协调控制ωr 和ωl 来调整车体的运行状态的,因而对于单个驱动电机而言,属于典型的速度控制器。
参照文献[2]有系统框图(图3)及单直流伺服电机的原理图(图4)。
图3中信号处理部分由车载计算机完成,其对应于仿真控制模块,U d 为AG V 总体车速运行控制信号,U e 为AG V 调节控制信号。
图4中e 为控制电压(V );e a 为作用到电枢—41—《起重运输机械》 2002(11)图3 差速型AG V 系统框图上的电压(V );R a 和L a 分别为电枢绕组的电阻(Ω)和电感(H );T 1,T 2为力矩(N 1m )。
减速比n =N 1/N 2。
所选用的脉宽调制(PW M )驱动器内部带有电流反馈,加上外部的测速电机反馈,就形成了电流/转速双闭环调速系统[4][6]。
其中PW M 驱动器的参数为:额定电压DC48V ,额定电流为25A ,允许最大瞬时电流为50A ,控制电压为-5V ~+5V ;电机的参数为:额定电压DC48V ,额定转速为1280r/min ,额定功率为113kW 。
对于双闭环电机调速系统,文献[4]中有对其简化处理的推导过程,利用Simulink 工具包可以进行具体设计,从内层的电流环到外部的速度环,对每个参数进行调整。
图4 单电机驱动原理图单台直流伺服电机相关的方程[4]:(1)电机电流与电压传递函数I d (s )=U d -E (s )R (1+T e s )(2)电机电枢反电势E (s )=C e n (s )(3)电流和转速关系函数I d (s )-I l (s )=T m C e n (s )s式中 T e 、T m ———分别为电机电磁时间常数和机电时间常数I d ———当前电枢中电流强度I l ———对应于负载T 2的电机最终稳定后的电枢电流强度。
图5和图6分别为电机系统局部动态结构框图和单电机控制框图。
Simulink 根据图6可以单独对电机进行仿真,且可以根据硬件设置来调整设定给定电压的饱和值等一系列参数。
这里将AG V 正常运行时的控制电压定为3V ,AG V 运行速度为017m/s ,此时对应的转速为770r/min 。
在图6中的In2处直接用电流表示方式输入即可仿真负载的输入,Simulink 可以很容易地给出随机变化量来仿真负载变化对AG V 运行控制的影响。
按照图6中参数设置,仿真电机转速没有超调,这虽然降低了响应速度,但有利于AG V 的平稳运行,电枢电流的峰值也没有超出实际硬件的规定值50A。
图5 电机控制局部动态结构框图3 电磁导向式差速型AGV 的导向控制仿真模型的建立 在AG V 车体运动模型和驱动电机模型建好之后,通过中间模块进行搭接组装成如图7所示的仿真系统框图。
该仿真系统可以监控的变量很多,包括各个模块的输入输出点及各个模块内部变量,这给判别该系统仿真的正确性和参数的修改提供了方便,但外部使用的变量则是实际能够测得的变量。
可以适合多种控制方式的仿真,例如,对图7中的PI D 控制器模块适当调整后,也可以用模糊控制方式等取代。
如果要考虑2电机之间的耦合作用,则在2电机模块负载输入端(in2)之间增加耦合模块即可。
4 仿真系统的测试与分析本文仅对AG V 直线段的运行控制进行仿真,这里将探头中心C 与导向轨迹之间的偏差变化情况作为评定仿真的一个基准。