结构动力学2
结构动力学第二章

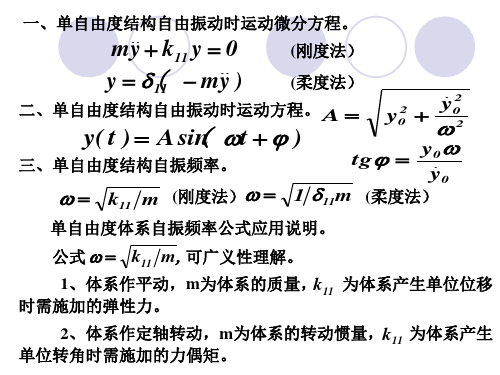
∂T ∂V d ∂T ( )− + = Pncj (t ), & dt ∂u j ∂u j ∂u j
其中: T —— 体系的动能;
j = 1,2,L , N
V —— 体系的位能,包括应变能及任何保守力的势能; Pncj ——与 uj 相应的非保守力(包括阻尼力及任意外荷载)。
– 红色部分为引入动力自由度概念的目的,蓝色部分为实 现此目的的手段。 – 概念中的“全部”、“独立”两个条件非常关键。
• 严格来说,所以结构体系质量都是连续分布的,为无限自 由度体系,研究比较困难。但许多情况下,可以作一定的 简化,变为有限自由度体系。 • 简化并确定结构动力自由度最典型的方法:集中质量法
动能
1 & mu 2 转动质量 2
T =
1 &2 Jθ 2
1 2 V = ku 转动弹簧 2
1 &2 V = kθ θ 2
位能
1 1 & & &j T = ∑ ∑ mij u i u j = ∑ m j u 2 2 i j 2 j
V =
1 ∑ ∑ kij ui u j 2 i j
∫
1 体系的动能:T = mu 2 & 2
粘滞(性)阻尼力可表示为:
& f D = -cu
D — 表示阻尼(damping) c — 阻尼系数(Damping coefficient)
k c
u m
f S(t) m f D(t) f I (t)
& u — 质点的运动速度
阻尼系数 c 的确定:
• 不能像结构刚度 k 那样可通过结构几何尺寸、构件尺寸等 来获得,因为 c 是反映了多种耗能因素综合影响的系数, 阻尼系数一般是通过结构原型振动试验的方法得到。 • 粘性(滞)阻尼理论仅是多种阻尼中最为简单的一种。 • 其它常用的阻尼:
结构动力学(2)

4. 对称性的利用 振动体系的对称性是指:结构对称、质量分布对称,强迫振
动时荷载对称或反对称。
多自由度和无限自由度对称体系的主振型不是对称就是反对称, 可分别取半边结构进行计算。
对称荷载作用下,振动形式为对称的;反对称荷载作用下, 振动形式为反对称的,可分别取半边结构进行计算。一般荷载可 分解为对称荷载和反对称荷载两组,分别计算再叠加。
(A( j ) )(T K ωi2 M)A( i ) 0
(A( i ) )(T K ω2j M)A( j ) 0
(1)
(A( i ) )(T K T ωi2 M T )( A( j ) ) 0
(2)
又: K T K MT M
(1)式-(2)式得:
( i22 j)(源自A( i ))TM
A(
3. 动内力幅值计算 位移、惯性力、动荷载频率相同。对于无阻尼体系三者同时
达到幅值。于是可将荷载幅值和惯性力幅值加在结构上,按静力 学方法求解,即得到体系的最大动内力和最大动位移。
多自由度体系不仅位移动力系数和内力动力系数不同,而且 不同截面上的位移动力系数和内力动力系数也各不相同,不能采 用统一动力系数计算动力反应。
由式(14-38)可知,此时式(14-47)得到位移为无穷大。所以, 一般情况下,n个自由度体系有n个共振点。
对于两个自由度体系,稳态振动时的位移幅值方程为
(11m1
1
2
)
y10
12 m2
y20
1P
2
0
21m1 y10 (22m2
1
2
)
y20
2P
2
0
D m1 11 2 1 12m2 2 21m1 2 m2 22 2 1
结构动力学第二章 单自由度系统的振动2
0.39 0.66 0.73 1.00 1.05 1.20 1.42 1.55 1.69 1.76 2.00
23
24
解: 水塔的自振频率和周期分别为
k 29.4106 N / m 31.305rad / s
m
30103 kg
T 2 0.2007s
取微小时段 0.01s ,约相当于水塔自振
同理,积分项 B(t) 可用相同的方法进行计算。
16
因此,无阻尼体系动力响应的数值解: y(t) A(t) sin t B(t) cost
同理,也可求得有阻尼体系动力响应。 注:数值积分解答的精确度与计算中选择和微 小时段 有关,一般可取小于系统自振周期 的十分之一,便可得到较好的结果。
17
A yst
1
2
t1
2
( 1 cost1
) 2
t1
1/ 2
sint1
t1 T
0.371
动力系数只与 t1 有关,即只与 t1 T 有关
下表列出不同 t1 T 值时的动力系数。
表 不同 t1 T 值时的动力系数表
t1/T 0.125 0.20 0.25 0.371 0.40 0.50 0.75 1.00 1.50 2.00
用下式进行计算。
无阻尼:
( 0)
y(t) 1 t p( ) sin (t )d
m 0
有阻尼: y(t) 1
( 0)
md
t 0
p(
)e (t )
sin d
(t
)d
2)对于许多实际情况,如果荷载的变化规律是 用一系列离散数据表示(如试验数据),此时 的响应计算就必须借助于数值分析方法。
11
结构动力学(克拉夫) 第二章 分析动力学基础

第二章 分析动力学基础2.1 基本概念 2.1.1 约束• 定义:对非自由系各质点的位置和速度所加的几何或 运动学的限制。
N 个质点的约束方程: → → 为mi 的位置向量及速度 **弹簧支座不是约束。
• 约束的分类:*稳定(不含t → 左图) 与非稳定(含t → 右图)* 完整(不含 → )几何约束(有限约束) 与非完整(含 → )运动约束(微分约束) • 约束条件:zc=a (水平面绝对光滑)一个完整约束 *水平面粗糙,仅滚动无滑动,A 点速度为零 。
两个完整约束*若为刚性圆球,三个约束(A点两个水平方向速度为零,可证明约束微分方程不能积分成有限形式)非完整约束单向(约束方程为不等式):柔索 与双向(约束方程为等式):刚杆 工程力学中研究对象:稳定的、完整的、双 向约束• 质点系约束方程:→ (N :质点数;M 约束数) 2.1.2 自由度与广义坐标 广义坐标定义:能决定体系几何位置的、彼此独立的量广义坐标个数→空间质点系:n=3N-k;平面质点系: n=2N-k0),,,,,,(11=⋅⋅⋅⋅⋅⋅N N r r r r t f 0),,(=i i r r t f i i r r ,0),(=i i rr f 0),,(=i i rr t f Ai r0),(=i r t f i r 0),,(=i i rr t f ϕϕa x a x v C C A =⇒=−=)(0积分 lr ≤l r =0),,(1=⋅⋅⋅N k r r f )~1;~1(0)(M k N i r f i k ===x双连刚杆双质点系的约束方程:广义坐标数:广义坐标:独立参数→角度→ 振型等(见下页) 梁的挠度曲线用三角级数表示: 广义坐标→*自由度定义:在固定时刻,约束许可条件下能自由变更的 独立的坐标数目(对完整约束=广义坐标数)• 自由度数→空间质点系:n=3N-k 平面质点系:n=2N-k (N :质点数;k: 约束数) 非完整约束:(广义坐标数>系统自由度数)2.1.3 功的定义元功:A →B 过程中力作的功:对摩擦传动轮的例,由于力未移动,位移=? • 功的新定义:(传动齿轮)• 功率:2.1.4 有势力和体系的势能有势力:(1)大小和方向只决定于体系质点的位置(2)体系从位置A 移动到位置B ,力作功只决定于位置而与路径无关取体系的任意位置为“零位置O ”,从位置A 移动到零位置O 各力作的功为体系在位置A 时的势能UA(位能)。
《结构力学》结构动力学(2)
为最大的动力位移与静力位移之比,称为位移动力系数。
简谐荷载作用下, 与 之间关系曲线分析。
1、无阻尼条件
(1) 0 时, 5.0
1, ymax ( t ) yst。
4.0
(2)0 1 0 时,
随着 增加 增大,
3.0
0
FP ( t ) FP sint。 y( t ) yst sint。
(3)当ξ=1时的阻尼称为临界阻尼;相应的 值称为
临界阻尼系数,用cr 表示,则
cr 2mk 2m ,
k 2mk 2m cr
阻尼比 即为阻尼系数 与临界阻尼系数 cr 之比。
§14-4 单自由度结构在简谐荷载作用下的强迫振动
当干扰力 F(t) 直接作用在质点上,质点的受力将如图14-10所示,
且 y( t )与FP ( t ) 同步。
2.0
(3) 1 时, 1.0
, ymax ( t ) , 共振。
(4)1 时,
1.0 2 2.0
3.0
随着 增加 减小,且 y( t )与 FP ( t ) 反向。
(5) 时, 0, 在静平衡位置附近作微小
振动 。
y0
cos 't
y0
ky0
'
sin
't
y bekt sin( 't ')
其中
b
y02
(ห้องสมุดไป่ตู้
y0
ky0
'
)2
tan ' ' y0
/ 为有阻尼自振频率。
y0 ky0
令 k ,称为阻尼比。
' 2 k2 1 ( k )2 1 2
通常当ξ<0.1时,则 ' 和 的差别很小。
于开平-结构动力学第二讲
(2) 阻尼力的功:
Wd A cos t dt c 2 / 1 cos 2 t cA2 2 dt 0 2 1 2 1 2 2 2 / cA2 2 cA cos 2 t dt 0 2 2
5 稳态响应振幅和相位
5.2 初始相位角 根据初相位角表达式
2 tg 1 2
可以画出初相位角随频率比的变化曲线,简称相频曲线:
在共振点,不管阻尼比多大,初相位角均为90度。
6 稳态响应复数解法及频响函数
之前将外载荷假设为正弦形式,其运动控制方程为:
������������ሷ 1 + ������������ሶ 1 + ������������1 = ������0 sin������������ 简谐激励的另一种典型形式为余弦形式,其运动控制方程写作: ������������ሷ 2 + ������ ������ሶ 2 + ������������2 = ������0 cos������������ (2) (1)
o o o
o
1 2 Fo A sin Fo A sin 2
6 稳态响应复数解法及频响函数
令方程特解为������ ������ = ������������ ������ ������������������ ,代入运动控制方程得: (−������2 ������������������ + ������������������������������ + ������������������ )������ ������������������ = ������0 ������ ������������������ 方程对任意时刻t恒等,则方程两边指数函数������ ������������������ 前系数相等,由此可得: ������������ = ������0 ������ − ������������ 2 + ������������������
05 结构力学——结构动力学2

2
K kl
2
K J
k m
18
第三节
单自由体系自由振动
2、有阻尼的自由振动 ( 0 )
m y c y ky 0 2 y 2 y y 0
齐次线性微分方程的特征方程
2 2
k m c 2m
2
2 0 2 ( 1 ) 1 ,2
微分方程的解按特征根的性质不同,具有三种不同形式:
19
第三节
单自由体系自由振动
( 1)
2、有阻尼的自由振动 ( 0 ) 1 小阻尼的情况 两个特征根为复数
y ( t ) e( C cos t C sin t ) d 2 d
t 1
2
y y 0 0 y ( t ) e ( y cos t sin t ) d d
a
32
第四节
单自由体系受迫振动
1、单自由体系受迫振动的一般解
m y c y ky F ( t ) E F ( t) 2 E y 2 y y m y ( t ) y ( t ) y ( t ) 1 2
求特解的基本思路
将动荷载的作用看成是一系列在质点上暂短停留 的不变的力(脉冲)的集合,由叠加可得到任意 荷载作用的响应。
kg W
g W
g ys
1 m
自振频率和周期的特性:
高等结构动力学2_模态综合法(动态子结构方法)
Φ
a p b Φ J b {0} p
[C ]{ p} {0}
d行
(n1+n2)个 p a
所以,有:
[C dd ]1[C dI ] { p} { p I } [ S ]{q} [I ]
独立的模态坐标
(n1+n2-d)个
[ M ]* [ S ]T [ M ][ S ], [ K ]* [ S ]T [ K ][ S ]
对于一般的动力学分析问题,也可以得到缩聚方程为:
} [C ]*{q } [ K ]*{q} {R}* [ M ]*{q
[C ]* [ S ]T [C ][ S ], {R}* [ S ]T {R}
动态子结构方法的基本思想:
按照工程的观点或结构的几何轮廓,遵循某些原则要求,把完整的大型复 杂结构人为地抽象成若干个子结构。首先对自由度少得多的各个子结构进 行动态分析,然后经由各种方案,把它们的主要模态信息予以保留,以综 合总体结构的动态特性 总系统(n个自由度) 子结构1 dd ]1[C dI ] [S ] [ I ]
uJ uI
uI
a b u u a b I I {u } a , {u } b u J u J {u a } [Φ ]a { p a }, {u b } [Φ ]b { p b }
{ p} b p d个 pd 设{p}中独立广义坐标为{pI},非独立广义坐标为{pd}: { p} p I (n1+n2-d)个 pd { pd } [C dd ]1[C dI ]{ p I } 可写为: [C dd ] [C dI ] {0} pI
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
其最大位移或振幅为:
y (t )max yst
1
动力系数为:
y(t )max
yst
2 1 2
2 1 2
※动力系数的含义
结构动力学
重要的特性:
“共振”
当θ/ω→0时,β→1,荷载变 化得很慢,可当作静荷载处理。 3 当0<θ/ω<1时,β>1,并且随 θ/ω的增大而增大。
r
y e t a sin( r t )
称为衰减系数
yn e tn a sin( r tn )
yn1 e ( tn T ) a sin( r tn 2 )
yn yn r 1 ln ln 2 yn1 2 yn1
k kg m W 12103 9.8 44.27s 1 60
W
解: (2)求荷载频率 求动力系数
1
2n 2 400 41.89 s 1 60 60 41.89
2
解 (3):求动力系数
1
2
44.27 41.89 1 2 1 在共振区 44.27 20 0.0159 m 竖向振动振幅 y P yst 9.56 3 12 10 地基最大压力 pmax W P0 60 9.56 20 12.56kPa A A 20 20
2
当θ/ω→1时,β→∞。即当荷 1 载频率接近于自振频率时,振幅 会无限增大。称为“共振”。通常 0 1 2 3 把0.75<θ/ω<1.25称为共振区。 当θ/ω>1时,β的绝对值随θ/ω 的增大而减小。当θ很大时,荷载变化很快,结构来不及反应。
3570cm4 I22b 例题 有一简支梁(I28b),惯性矩I=7480cm4,截面系数 325 W=534cm3,E=2.1×104kN/cm2。在跨度中点有电动机重量 Q=35kN,转速n=500r/min。由于具有偏心,转动时产生离心力 可见,对于本例,采用较小 P=10kN,P的竖向分量为Psinθt。忽略梁的质量,试求强迫振动 的截面的梁既可避免共振, 的动力系数和最大挠度和最大正应力。梁长l=4m. 又能获得较好的经济效益。 解:1)求自振频率和荷载频率
g
st 2n 60 23.14500 60 52.3 1S 52.3/57.4=0.91,共振! 1 1 5.88 2)求动力系数β 2 2 2 2 39.7 1 152.3 57.4 1.35
39.7 48EIg Ql3 482.1104 7480 980 354003 57.4 1 S 3570
短时荷载的动力效果取决于加载持续时间的长短。
结构动力学
•阻尼对振动的影响
振动中的阻尼力有多种来源,例如振动过程中结构和支撑之间 的摩擦、材料之间的内摩擦,周围介质的阻力,等等。 阻尼力对质点运动起到阻碍作用。从方向上看:它总是与质点的 速度方向相反。
地震波
台北的101大楼是在88-92楼层挂置 一个重达680公吨的巨大钢球,利用摆 动来减缓建筑物的晃幅.
结构动力学
•单自由度体系的强迫振动
结构在动荷载作用下的振动称为强迫振动或受迫振动。 单自由度体系强迫振动方程
my ky Fp (t ) Fp (t ) 2 y y m
简谐荷载 常用的荷载 一般动荷载 突加荷载 短时荷载 线性渐增荷载
结构动力学
简谐荷载
Fp (t ) F sin t
有阻尼单自由体系自由振动
y
m
l
m y
ky
cy
m cy k11 y 0 y
令: 2
k11 c , m 2m
2 y 2 y 0 设解为:y Ce t y
EI
3EI k11 3 l
y
2 2 2 0
杜哈梅积分 一般动荷载:
P (t ) y y m
2
t 0, S Pt , v0
y
S , y0 0 m
t=0时刻瞬时冲量S引起的动力反应:
P(t )
dS P(τ )dτ
S sin t m
S sin (t τ ) 当t τ 时 m P(τ )dτ t τ 时刻作用 dS: dy sin (t τ ) 当t τ 时 m 由叠加原理 t 时刻位移反应: t τ 时刻作用 S: y
y
m
l
m y
ky
cy
m cy k11 y 0 y
令: 2
k11 c , m 2m
2
2 y 2 y 0 当 1时: r 1 y 令
初始条件 t 0: y0 , y
EI
3EI k11 3 l
y
y y0 阻尼圆频率:
2
1
9.59
0.946
2 2 2 1 2 4 2
1 41.892 41.892 2 1 44.272 4 0.15 44.272
2
3.31
因在共振区或: 1 / 2 3.33 20 0.0055m 竖向振动振幅 yP 3.31 3 12 10 P0 60 W 20 地基最大压力 pmax 3.31 6.31kPa A A 20 20
讨论:由此可以测定阻尼比。 测定精度如何提高?
例题 图示机器与基础总重量W=60kN,基础下土壤的抗压 刚度系数为cz=0.6N/cm2=0.6×103kN/m3,基础地面积A=20m2。 试求机器连同基础作竖向振动时 (1) 自振频率; (2) 机器运转产生P0sinθt,P0=20kN,转速为400r/min。求 振幅及地基最大压力。 (3) 如考虑阻尼,阻尼比ξ=0.5,求振幅及地基最大压力。 解: (1)让振动质量向下单位位移 P0sinθt 需施加的力为: k= czA= 0.6×103 ×20 =126×103kN/m结动力学THE END!
y y
2
2
Fp (t ) m
F y sin t y m
y 设特解为: (t ) A sin t
y (t ) F
( 2 2 ) A sin t
F sin t m
2 m 2 (1 2 )
sin t
F A m( 2 2 )
令: yst
F F ————最大静位移 2 m
结构动力学
特解: y (t ) yst
1
齐次解:
2
1 2
sin t
y(t ) C1 sin t C2 cos t
1 1
y (t ) C1 sin t C2 cos t yst
t 0, C1 yst 2 , C2 0 1 2
Ql Pl (Q P)l 175.6MPa max 4W 4W 4W 149.2
必须特别注意,这种处理方法只适用于单自由度体系在质 Ql3 Pl 3 max st y st 点上受干扰力作用的情况。对于干扰力不作用于质点的单自由 48EI 48EI 度体系,以及多自由度体系,均不能采用这一方法。
i r
( 2 1)
2
令 当阻尼很小,即 当 1时: r 1
y e t (C1 sin r t C2 cos r t ) 初始条件 t 0: y0 , y y y0
ye
阻尼圆频率:
t
t y0 r y 0 y0 cos r t sin r t e a sin( r t ) r
r
讨论:有阻尼时频率、周期的变化如何?
当 1时为临界阻尼、 1为超阻尼 振动不会产生?
有阻尼单自由体系自由振动
那么,方程的解为: y (t ) yst
1
2
2
sin t
过渡阶段
平稳阶段
sin t sin t 2 1 2
按照自振频率振动
按照荷载频率振动
结构动力学
平稳振动阶段,任意一个时刻的位移为:
y (t ) yst 1
1 2
2
sin t 1
τ
dτ
t
1 y (t ) m
t
0
P(τ ) sin (t τ )dτ
t
称为杜哈梅(J.M.C.Duhamel)积分。 初始条件 t 0: y0 , y v0 y
1 y (t ) y0 cos t sin t m
v0
t
0
P(τ ) sin (t τ )dτ