第5章作业参考答案
【精品】作业参考答案
【关键字】精品第五章作业参考答案1、什么是多媒体演示文稿?答:多媒体演示文稿指包含文字、图形、声音、视频等多种媒体的东西的演示文稿。
2、普通视图下的Power Point的界面由哪几个部分组成?答:普通视图下的Power Point 的界面由标题栏、菜单栏、工具栏、幻灯片窗格、大纲窗格、状态栏、视图切换按钮、备注窗格以及任务窗格这几个部分组成。
3、PowerPoint有哪几种视图模式?答:PowerPoint为用户提供了六种不同的工作模式:普通视图、大纲视图、幻灯片视图、幻灯片浏览视图、幻灯片放映视图和备注视图。
4、简述普通视图下窗口的组成及普通视图下各窗格的作用。
答: 普通视图模式的视窗主要由大纲窗格、幻灯片窗格和备注窗格3个窗格组成。
在普通视图模式中,用户可以创建或直接修改、编辑演示文稿的大纲文件、幻灯片和备注内容.大纲窗格使用大纲窗格可以组织演示文稿的内容框架:键入演示文稿的所有文本,重新排列幻灯片等。
该窗格仅仅显示文稿的文本部分(即仅有标题和主要文字)。
它为制作者组织材料、编写大纲提供了简明的环境。
幻灯片窗格在幻灯片窗格中,可以查看和编辑每张幻灯片中的东西布局效果,其中包括修饰文本的外观、插入的图形、影片和声音东西,并可以设置超级连接以及为当前幻灯片设置动画效果,制作一个具有多媒体效果的演示文稿。
在该窗格中一次只能编辑一张幻灯片,这是制作幻灯片的主要场所。
备注窗格使用备注窗格可以添加或查看当前幻灯片的演讲备注信息,对于图片形式的备注信息必须通过备注视图添加。
备注信息只出现在备注窗格中,在文稿演示时不会出现。
5、如何打开任务窗格?(上机完成)答:单击菜单“视图”/“任务窗格”打开任务窗格。
6、简述普通视图、换灯片浏览视图、幻灯片放映视图的三视图的切换方法和作用。
答:视图切换按钮(三个)位于工作窗口的左下角,用来在3种不同的视图模式(普通视图、幻灯片浏览视图和幻灯片按钮视图)间切换。
普通视图作为PowerPoint的默认工作方式,也是其主要工作模式。
第5章习题答案

第5章5-1传输线长度为1m ,当信号频率分别为975MHz 和6MHz 时,传输线分别是长线还是短线?答:1) 频率为975MHz 时,信号的波长为0.3077m<1m ,传输线是长线;2) 频率为6MHz 时,信号的波长为50m>1m ,传输线是短线;5-2已知同轴电缆的特性阻抗为75Ω,其终端接负载阻抗Z L =25+j50Ω,计算终端反射系数2Γ。
答:217550257550250L 0L 2+-=++-+=+-=Γj j j j Z Z Z Z5-3 一无耗传输线特性阻抗为Z 0=100Ω,负载阻抗Z L =75-j68Ω,试求距离终端为λ/8和λ/4处的输入阻抗。
答:1006850687568257568250L 0L 2+-=++-+=+-=Γj j j j Z Z Z Z100685068)(100685068100685068822'228/++=-+-=+-=Γ=Γ--j j j j j e j j e j z j λλπβλ 100686850)1(100685068100685068422'224/+-=-+-=+-=Γ=Γ--j jj j e j j ej z j λλπβλL 02L 075681002568756810017568Z Z j jZ Z j j-----Γ===+-+-222'8/82256825682568()175681756817568j j z j j j ee j j j j πλβλλ-------Γ=Γ==-=---0256811(8)1756825682000013617568(/8)10010025681(8)175682568150117568in j j j j j Z Z j j j j λλλ-++Γ-+---====--Γ--+-- 222'4/42256825682568(1)175681756817568j j z j j j ee j j jπλβλλ------+Γ=Γ==-=---0256811(4)1756825682000017568(/4)10010025681(4)175682568150136117568in j j j j Z Z j j j j j λλλ+++Γ-++-====+-Γ------5-4设无耗线终端接负载阻抗L L j X Z Z +=0,其实部0Z 为传输线特性阻抗,试证明:负载的归一化电抗L ~X 与驻波系数ρ的关系为ρρ1~L -=X 。
第5章 习题与思考题和答案
4.下段程序执行的输出结果是。
S=0:T=0:U=0
For i=1 To 3
For j=1 To i
For K=j To 3
S=S+1
Next K
T=T+1
Next j
U=U+1
Next i
Print S;T;U
A.3 6 14B.14 63C.14 3 6D.16 4 3
Next j
If j>Int (Sqr(n-m))ThenPrint n,m,n-m
EndIf
Next m
Next n
EndSub
六
(1)编程序计算:1!+3!+5!+….+11!
(2)输入两个正整数m和n,求其最大公约数a和最小公倍数b,计算最大公约数a的方法如下:先算出m/n余数r,若r等于0,则n为最大公约数;若r不为0,则把原来的n值作为新的m值,把原来的r值作为新的n值,继续运算。这样辗转相除,直到r为0,此时的n值为最大公约数a,最小公倍数则可用原始m与n值的积除以最大公约数求得。
Private Sub Form_click()
Dim k,a,b as integer
a=20
b=2
k=2
Do While k<=a
b=b*2
k=k+5
Loop
Print b
End Sub
5.写出以下程序在单击命令按钮后的输出结果。
Private Sub Form_click()
k=0
fori=1 to 5
If n <= 0 Or m <= 0 Then
第5章 习题参考答案
第五章习题参考答案一、填空题1、MCS-51有5个中断源,2个中断优先级,优先级由软件填写特殊功能寄存器 IP 加以选择。
2、外中断请求标志位是 IE0 和 IE1 。
3、 RETI 指令以及任何访问 IE 和 IP 寄存器的指令执行过后,CPU不能马上响应中断。
4、8051单片机响应中断后,产生长调用指令LCALL,执行该指令的过程包括:首先把 PC的内容压入堆栈,以进行断点保护,然后把长调用指令的16位地址送 PC ,使程序执行转向程序存储器中的中断地址区。
二、选择题:1、在中断服务程序中,至少应有一条( D )。
A、传送指令B、转移指令C、加法指令D、中断返回指令2、要使MCS-51能够响应定时器T1中断,串行接口中断,它的中断允许寄存器IE的内容应是( A )。
A、 98HB、 84HC、 42HD、 22H3、MCS-51响应中断时,下列哪种操作不会发生( A )A、保护现场B、保护PCC、找到中断入口D、保护PC转入中断入口4、MCS-51中断源有( A )A、 5个B、 2个C、 3个D、6个5、计算机在使用中断方式与外界交换信息时,保护现场的工作应该是( C )A、由CPU自动完成B、在中断响应中完成C、应由中断服务程序完成D、在主程序中完成6、MCS-51的中断允许触发器内容为83H,CPU将响应的中断请求是( D )。
A、 INT0,INT1B、 T0,T1C、 T1,串行接口D、 INT0,T07、若MCS-51中断源都编程为同级,当它们同时申请中断时,CPU首先响应( B )。
A、 INT1B、 INT0C、 T1D、T08、当CPU响应串行接口中断时,程序应转到( C )。
A、 0003HB、 0013HC、 0023HD、 0033H9、执行MOV IE,#03H后,MCS-51将响应的中断是( D )。
A、 1个B、 2个C、 3个D、0个10、外部中断1固定对应的中断入口地址为( C )。
现代工程制图答案 第5章

5-6.4 补画视图中所缺图线
参考答案
切点
5-6.5 补画视图中所缺图线
参考答案
切点
5-6.6 补画视图中所缺图线
参考答案
5-7.1 读懂两视图后,补画第三视图(一)
参考答案
5-7.2 读懂两视图后,补画第三视图(一)
参考答案
y1 y2
y2 y1
5-7.3 读懂两视图后,补画第三视图(一)
y
y
5-1.6 根据轴测图补画视图中所缺图线
5-2 看懂两视图,找出对应的立体图,并画出第三视图
( )
( )
( )
( )
5-2 看懂两视图,找出对应的立体图,并画出第三视图
( )
( )
( )
( )
5-3.1 根据轴测图画出组合体三视图(尺寸从图中直接量取)
y
y
5-3.2 根据轴测图画出组合体三视图(尺寸从图中直接量取)
三维模型
5-8.6 读懂两视图后,补画第三视图(二)
三维模型
5-9.1 读懂两视图后,补画第三视图(三)
三维模型
5-9.2 读懂两视图后,补画第三视图(三)
三维模型
5-9.3 读懂两视图后,补画第三视图(三)
三维模型
5-9.4 读懂两视图后,补画第三视图(三)
三维模型
5-9.5 读懂两视图后,补画第三视图(三)
5-9.5 5-9.6
5-4.1 5-4.2 5-5.1 5-5.2 5-5.3 5-5.4
5-5.5 5-5.6 5-6.1 5-6.2 5-6.3 5-6.4 5-6.5 5-6.6
5-10.1 5-10.2 5-10.3
5-11.1 5-11.2 5-11.3
第5章 习题答案
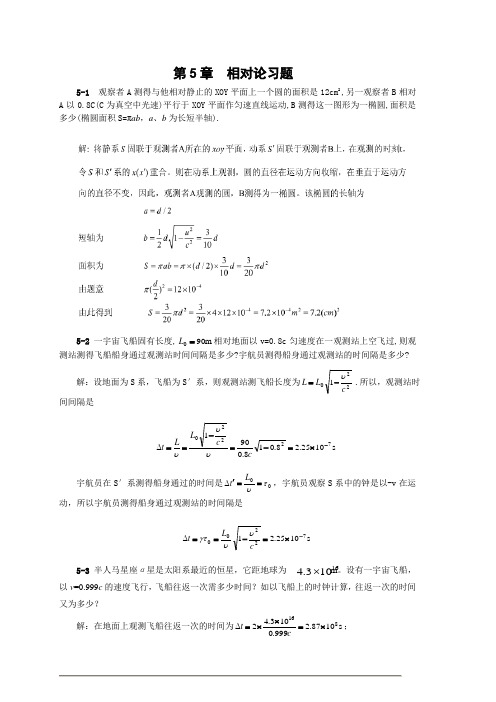
第5章 相对论习题5-1 观察者A 测得与他相对静止的XOY 平面上一个圆的面积是12cm 2,另一观察者B 相对A 以0.8C(C 为真空中光速)平行于XOY 平面作匀速直线运动,B 测得这一图形为一椭圆,面积是多少(椭圆面积S=πab ,a 、b 为长短半轴).5-2 一宇宙飞船固有长度,m 900=L 相对地面以v=0.8c 匀速度在一观测站上空飞过,则观测站测得飞船船身通过观测站时间间隔是多少?宇航员测得船身通过观测站的时间隔是多少?解:设地面为S 系,飞船为S ′系,则观测站测飞船长度为2201c L L υ-=.所以,观测站时间间隔是s 1025.28.018.090172220-⨯=-=-==cc L Lt υυυ∆ 宇航员在S ′系测得船身通过的时间是00τυ=='L t ∆,宇航员观察S 系中的钟是以-v 在运动,所以宇航员测得船身通过观测站的时间隔是s 1025.217220-⨯=-==cL t υυγτ∆5-3 半人马星座α星是太阳系最近的恒星,它距地球为 m 。
设有一宇宙飞船,以v =0.999c 的速度飞行,飞船往返一次需多少时间?如以飞船上的时钟计算,往返一次的时间又为多少?解:在地面上观测飞船往返一次的时间为s 1087.2999.0103.42816⨯=⨯⨯=ct ∆;16103.4⨯在飞船上观测距离缩短,测得时间为s 1028.1999.0999.01103.47216⨯=-⨯='ct ∆;或运动的钟测得s 1028.1999.01999.0103.47216⨯=-⨯='ct ∆.5-4 观测者甲和乙分别静止于两个惯性参照系K 和K ′中,甲测得在同一地点发生的两个事件的时间间隔为4S,而乙测得这两个事件的时间间隔为5S,求:(1) K ′相对于K 的运动速度;(2) 乙测得这两个事件发生的地点的距离.解:(1)设两事件的时空坐标见下表事件1 事件2 K 系 ),(11t x ),(21t x K ′系),(11t x '' ),(22t x '' 由洛伦兹变换)/(2c x t t υγ-='得222/1/)/(c t c x t t υυγ-=-='∆∆∆∆解上式得 c c t t c 6.0)54(1)(122=-='-=∆∆υ. (2)由洛伦兹变换)/(2c x t t '+'=υγ得)/(2c x t t '+'=∆∆∆υγ解之得 m 109105)56.014()(882212⨯-=⨯⨯--='-='-'='υγc t tx x x ∆∆∆5-5 惯性系S ′相对另一惯性系S 沿x 轴作匀速直线运动,取两坐标原点重合时刻作为计时起点.在S 系中测得两事件的时空坐标分别为x 1=6×104m,t 1=2×10-4s ,以及x 2=12×104m, t 2=1×10-4s .已知在S ′系中测得该两事件同时发生.试问:(1)S ′系相对S 系的速度是多少? (2)S '系中测得的两事件的空间间隔是多少?解:(1)由洛伦兹变换)/(2c x t t υγ-='得0)/(2=-='c x t t ∆∆∆υγ解之得 m/s 105.110310610)1(10388448⨯-=⨯⨯⨯⨯-⨯⨯==-c x t c ∆∆υ (2)由)(t x x '+'=υγ得x t x x '='+'=∆∆∆∆γυγ)(所以 m 102.55.01106/)(424⨯=-⨯=='+'='γυγx t x x ∆∆∆∆5-6 长度01m =l 的米尺静止于S ′系中,与x '轴的夹角o 30'=θ,S ′系相对S 系沿x 轴运动,在S 系中观测者测得米尺与x 轴夹角为o45=θ. 试求:(1)S ′系和S 系的相对运动速度.(2)S 系中测得的米尺长度.解:(1)由教材p152例题5.3有θγθ'=tan tan 得 c c 816.0)tan tan (12='-=θθυ (2)在x 方向尺会缩短,即m 5.0tan tan cos tan tan 0=''=''='=θθθθθγl x x x ;y 方向没运动,长度不变,即m 5.0sin 0='='=θl y y 。
第5章习题答案

间接寻址(Indirect Addressing)
寄存器寻址(Register Addressing)
寄存器间接(Register indirect Addressing) 偏移寻址(Displacement Addressing)
变址寻址(Indexing)
变址寄存器(index register)
000
RS 型 OP (6 位) 01 R t (3 位) 10 Rs (3 位) RX 型 OP (6 位) 01 R t (3 位) 11 Rx (3 位)
Offset16 (16 位)
XI 型 OP (6 位) 11 Rx (3 位) Offset16 (16 位) 00 Imm16 (16 位)
可执行程序文件(Executable program file)
链接程序(Linker / Link editor)
装入程序(Loader)
全局指针(Global pointer )
伪指令(pseudo-instruction)
CISC(Complex Instruction Set Computer) RISC(Reduced Instruction Set Computer)
结构力学 第五章 作业参考答案

结构力学 第五章习题 参考答案2005级 TANG Gui-he (整理)5-1 试用结点法计算图示桁架各杆的内力。
5-2 试用结点法计算图示桁架各杆的内力。
解:由整体平衡条件可解得支座反力 F A =1.5F F B =1.5F 取结点A 为隔离体,如图,用数解法可解得 F A C =-2.12F F A B =1.5F 同理,依次取结点B 、C 、 D 、E 为隔离体,并由对称性可得各杆的内力如图。
4 * 8m60k N60k N6M 2MA B C D E FG H 解:由 M H =0 可得支座F a y=75kN.由 F Y=0 得 F h y=45kN 取 A 结点为隔离体,利用数解法可得 F N AB=-100kN. F NAC=125kN. 再取 C 点为隔离体,利用投影法和力平衡 可得 F N BC=-50,F NCE=103.1kN.同理依次取 B , D , E , G , F 可得各杆内力(如图所标)AC-60k N -90k N -100k N 45k N75k N125k N 75k N 42.4k N61.8k N 103.1k N -60k N -50k N -30k N55-4试判断图示桁架中的零杆。
解:图中红色的杆件为零杆在杆中标有 为零杆其中用到K 型和T 型结构判断原理5-5试用截面法计算图示桁架中指定杆件的内力。
2解:(1)求出支座竖向反力为2.5F (↑),(2)作截面I -I ,由∑M A=0得: 2.5F ×15-10F -5F +6F N 1=0 → F N 1=-3.75F (3)由∑M B=0得: 2.5F ×10-F ×5-F N 2×6=0 → F N 2=3.33F (4)利用勾股定理求出A B 杆长7.8F N 4x =5F N 4/3.84 由∑M C=0得: 2.5F ×10-5F +F N 1×6+6×5F N 4/7.8=0 → F N 4=0.65F (5)取结点B 为分析对象,由∑F Y=0得: F N 4×6/7.8+F N 3=0 → F N 3=-0.5F5-6试用截面法计算图示桁架中指定杆件的内力。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目的
B C D E
下一跳
距离
B 2 链路质量 2 1 5
表2
表1
1)请根据上述当前链路状态路由信息,画出对应的拓扑图。 2)计算出节点A的路由表,将结果填入表2。
19
1)对应的拓扑图
1 C 3 5 2 6
A
2
B
E
D
2)节点A的路由表
节点A本地直连链 路表 直连节 距离 点 B 2 路由表
目的 B C D E 下一跳 B B B B 距离 2 3 6 8
节点C 目的节点 开销
路径
A
B C D E
5
0 1 2
A
5 D DE A 1 C 1 2
3
E 1 D
B
2
2) L-S算法
1. 在集合S1中,找到路径总开销最小的节点B,路径总开销为3。将其从正在处理的 集合S1移动至已处理节点集合S0,S0={C,D,E,B}, S1={A}; 2. 将未处理节点集合S2中节点B的邻居节点加入正在处理节点集合S1,由于S2为空, 所以S1不变,S1={A} 。
5 A 1 C 1 3
E 1 D
2 B
2
1) D-V算法,不妨设路由表信息扩散周期不小于5
A) 初始表
节点A 目的节点 下一节点 距离 B C B C 1 5 节点B 目的节点 下一节点 距离 A D A D 1 2 节点C 目的节点 下一节点 距离 A D A D 5 1
E
E
2
E
E
3
1) D-V算法
A) 初始表
节点D 目的节点 下一节点 距离 B C B C 2 1 节点E 目的节点 下一节点 距离 B C B C 2 3
E
E
1
D
D
1
1) D-V算法
B) 第1轮信息交换后的路由表
节点A收到B、C的 路由表信息
节点A 目的节点 下一节点 距离
节点B收到A、D、 E的路由表信息
节点B 目的节点 下一节点 距离
节点E 目的节点 下一节点 距离
A
B C E
B
B C E
3
2 1 1
A
B C D
B
B D D
3
2 2 1
1) D-V算法
C) 第2轮信息交换后的路由表
节点A收到B、C的 路由表信息
节点A 目的节点 下一节点 距离
节点B收到A、D、 E的路由表信息
节点B 目的节点 下一节点 距离
节点C收到A、D、 E的路由表信息
第5章作业参考答案
1、简述在距离矢量算法(D-V)和链路状态算法 (L-S)中,各节点计算路由转发表时,各以什 么为依据?并以此分别说明采用D-V和L-S算法的 节点对网络拓扑的了解情况。
1) 距离矢量算法
– 向邻居扩散自己的路由表信息(目的节点、距离), 只与邻节点交换路由信息 – 将邻居的路由表信息作为本节点计算最优路径(最短 距离)的依据 – 通常每个节点对网络拓扑没有完整的了解,只知道去 往各目的节点的下一节点和距离。
节点C 目的节点 开销 A B C D 5 0 1
路径
A 5 D A 1 C 1 2
3
E 1 D
E
3
E
B
2
2) L-S算法
1. 在集合S1中,找到路径总开销最小的节点D,路径总开销为1。将其从正在处理的 集合S1移动至已处理节点集合S0,S0={C,D}, S1={A,E}; 2. 将未处理节点集合S2中节点D的邻居节点加入正在处理节点集合S1,S1={A,E,B}; 3. S2集合变为空,即S2={ }。
节点C 目的节点 下一节点 距离
B
C D E
B
B B B
1
4 3 3
A
C D E
A
D D E
1
3 2 2
A
B D E
D
D D E
4
3 1 3
1) D-V算法
C) 第2轮信息交换后的路由表
节点D收到B、C、 E的路由表信息
节点D 目的节点 下一节点 距离
节点E收到B、C、 D的路由表信息
节点E 目的节点 下一节点 距离
B
IP 802.3 802.3 PHY PPP PPP
IP HDLC RS232
IP HDLC
• 采用了协议覆盖方式实现网络互联 • 其特点是:
– 增加统一的上层(此处为IP协议) – 不同的协议(以太网、PPP、HDLC)都可运载同一种上 层协议(IP) – 各层都为上层提供透明的通信服务 – 将异构的网络在覆盖层上进行统一实现网络互联
A
B C E
B
B C E
3
2 1 1
A
B C D
B
B D D
3
2 2 1
2) L-S算法
节点扩散链路信息,并获得网络拓扑
节点A的链路状态
节点A 目的节点 开销 B C 1 5
节点B的链路状态
节点B 目的节点 开销 A D E 1 2 2
节点C的链路状态
节点C 目的节点 开销 A D E 5 1 3
2) L-S算法
节点扩散链路信息,并获得网络拓扑
节点D的链路状态
节点D 目的节点 开销 B C E 2 1 1
节点E的链路状态
节点E 目的节点 开销 B C D 2 3 1
2) L-S算法
1. 将源节点C加入已处理节点集合,即S0={C}; 2. 将节点C的邻居节点加入正在处理节点集合,即S1={A,D,E}; 3. 网络中所有剩余节点加入未处理节点集合,即S2={B}。
节点C 目的节点 开销
路径
A
B C D E
5
3 0 1 2
A
DB D DE A 1 5 C 1 2
3
E 1 D
B
2
2) L-S算法
1. 在集合S1中,找到路径总开销最小的节点A,路径总开销为4。将其从正在处理的 集合S1移动至已处理节点集合S0,S0={C,D,E,B,A}, S1={ }; 2. 将未处理节点集合S2中节点A的邻居节点加入正在处理节点集合S1,由于S2为空, 所以S1不变,S1={ } ; 3. 由于S1和S2均为空,算法结束。
节点C 目的节点 开销
路径
A
B C D E
5
0 1 3
A
5 D E A 1 C 1 2
3
E 1 D
B
2
2) L-S算法
1. 在集合S1中,找到路径总开销最小的节点E,路径总开销为2。将其从正在处理的 集合S1移动至已处理节点集合S0,S0={C,D,E}, S1={A,B}; 2. 将未处理节点集合S2中节点E的邻居节点加入正在处理节点集合S1,由于S2为空, 所以S1不变,S1={A,B} 。
节点C 目的节点 开销
路径
A
B C D E
4
3 0 1 2
DBA
DB D DE D
B
2
3、由节点A、B、C、D、E组成的网络中,采用链路状态路由算 法,节点A一段时间内接收到如表1所示的链路状态路由信息和A 节点本地直连信息。
接收的链路状态路由信息 宣告者 B C 信息序号 1 1 链路号 对端节点 链路质量 对端节点 链路质量 对端节点 1 A 2 B 1 B 2 C 1 D 3 C 3 D 5 E 6 E 4 接收的链路状态路由信息 宣告者 E C 信息序号 1 2 链路号 对端节点 链路质量 对端节点 链路质量 对端节点 1 C 6 B 1 A 2 D 2 D 3 C 3 E 6 D 4 D 1 链路质量 5 3 2 节点A本地直连链 路表 直连节 距离 点 B 2 路由表
4、下图表示三个网络通过两个互联设备连接起来。 管理员在三个黑点处设置了三个测试点,以下给出 了在三个测试点测出的帧内容,请填写A网上的一台 主机、互联设备、B网上的一台主机的协议栈,并指 出使用了哪种网络互联技术,和该技术的特点。 (注R1,R2是相同协议栈的设备)。
测1 测2 测3
A
R1
C
R2
2) 链路状态算法
– 一般以时延作为度量的参数,发现邻居并测量与邻居 的时延(延迟,链路状态) – 与所有节点交流与邻居的链路状态信息,进而得出全 网拓扑 – 根据全网拓扑,独立计算出到其他节点的最佳路径 (最小时延) – 每个节点对网络拓扑都有完整的了解,而不是建立在 别人的计算结果上。
2、下图中以延迟为代价,请用D-V算法和L-S算法分 别计算C点的路由转发表(要求答题步骤:初始表, 收到中间信息后,路由的变化过程,以及稳定后C点 的路由表)。
节点C收到A、D、 E的路由表信息
节点C 目的节点 下一节点 距离
B
C D E
B
C B B
1
5 3 3
A
C D E
A
D D E
1
3 2 2
A
B D E
A
D D E
5
3 1 3
1) D-V算法
B) 第1轮信息交换后的路由表
节点D收到B、C、 E的路由表信息
节点D 目的节点 下一节点 距离
节点E收到B、C、 D的路由表信息