数控机床的伺服进给系统课程设计
立式数控铣床进给传动系统设计
课程设计任务书目录1.概述 (3)1.1技术要求 (3)1.2总体设计方案 (3)2.滚珠丝杠螺母副的选型和计算 (3)2.1主切削力及其切削分力计算 (3)2.2导轨摩擦力的计算 (4)2.3计算滚珠丝杠螺母副的轴向负载力 (4)2.4滚珠丝杠的动载荷计算与直径估算 (5)3.工作台部件的装配图设计 (9)4.滚珠丝杠螺母副的承载能力校验 (9)4.1滚珠丝杆螺母副临界压缩载荷的校验 (9)4.2滚珠丝杆螺母副临界转速的校验 (9)4.3滚珠丝杆螺母副额定寿命的校验 (10)5.计算机械传动系统的刚度 (10)5.1机械传动系统的刚度计算 (10)5.2滚珠丝杠螺母副扭转刚度的计算 (11)6.驱动电动机的选型与计算 (11)6.1计算折算到电动机轴上的负载惯量。
(11)6.2计算折算到电动机轴上的负载力矩 (12)6.3 计算坐标轴折算到电动机轴上的各种所需力矩 (13)6.4选择驱动电动机的型号 (14)7.确定滚珠丝杠螺母副的精度等级和规格型号 (14)7.1确定滚珠丝杠螺母副的精度等级 (14)7.2滚珠丝杠螺母副的规格型号 (15)8. 课程设计总结 (15)9.参考文献 (15)1.概述1.1技术要求工作台、工件和夹具的总质量m=918kg,其中,工作台的质量510kg;工作台的最大行程Lp=600 mm;工作台快速移动速度18000mm/min;工作台采用贴塑导轨,导轨的动摩擦系数为0.15,静摩擦系数为0.12;工作台的定位精度为30μm,重复定位精度为15μm;机床的工作寿命为20000h(即工作时间为10年)。
机床采用主轴伺服电动机,额定功率为5.5kw,机床采用端面铣刀进行强力切削,铣刀直径125mm,主轴转速310r/min。
切削状况如下:数控铣床的切削状况1.2总体设计方案为了满足以上技术要求,采取以下技术方案:(1)工作台工作面尺寸(宽度×长度)确定为400mm×1200mm。
CK6140数控车床主传动系统及进给伺服系统设计
__届毕业(设计)论文题目CK6140数控车床主传动系统及进给伺服系统设计专业班级学号学生姓名随笔客指导教师指导教师职称学院名称机电工程学院完成日期: 2014 年 5 月 25日CK6140数控车床主传动系统及进给伺服系统设计CK6140 CNC lathe main drive system and feed servo system design学生姓名指导教师摘要本文介绍了CK6140数控车床的组成及工作原理,对数控机床的主要组成部分:机床主轴箱,进给伺服系统及主轴PLC控制进行了总体的设计及其详细设计。
数控机床是现代机电一体化的典型产品,对提高零件的加工质量和加工效率具有较好的作用。
在本次设计中,主要完成了以下工作:根据给出的要求,首先确定设计要求给出的已知条件确定电机的型号和功率,传动系统的布局,变速方式,开停方式,换向方式,制动方式及齿轮的排列与布置。
然后根据转速范围及级数确定它的转速图、各齿轮的齿数和传动系统简图。
在根据已确定传动比来确定带传动。
通过轴的初步设计,进行齿轮的设计和校核。
选取相应的轴承和键,进行轴的具体设计和校核,键和轴承的设计和校核。
最后进行装配图和各个零件图的绘制,完成主轴箱的设计。
然后完成伺服系统的设计。
在对进给伺服系统进行设计时,要确定进给传动系统的传动方式及控制系统的形式。
设计中,选择进给伺服系统为开环控制系统。
通过给定的参数选择好步进电机的步距角可确定传动齿轮的传动比及滚珠丝杆的导程。
设计的进给伺服系统能够满足设计任务的要求。
关键词:数控机床主轴箱进给伺服系统AbstractThis thesis introduced the constitution and working principle of CK6140 machine tool,the primarily parts of NC machine tool designed:including proceeds the total design and detailed design. NC machine tool is a modern machine to give or get an electric shock the integral whole the typical model of technique the processing of product, right exaltation spare parts the quantity with process the efficiency to have the good function. In this design,primarily completed following work.According to the timetable to design. First identified design requirements given the known conditions determine the type and electrical power, drivetrain system layout, speed change, stop the way for the way braking and gear configuration and the way layout. Based on rotational speed and scope of the class to determine its rotational speed maps, the various gear and drivetrain system Chishu sketch. In accordance with established transmission belt transmission than to determine. Through axle of the preliminary design, gear design and verification. The bearings and get used to a specific axle design and verification, design and verification keys and bearings. Final assembly of the various parts and mapping. Completed the design of headstock.Then completing the design of the servomechanism system. In designing of servo system, we can determine driving mode of driving system and controlling mode of controllingsystem,choosing the servo system for opening wreath control the system.Passing the parameter to settle the choice the good step the step for the electrical engineering the distance cape can make sure to spread to move the spreading of wheel gear to move the radio the roll the bead silk the think stick's lead. Design of into give the servo system can satisfy to designthe request of the mission.Keywords:NC Machine Tool;Axis Housing;Servomechanism目录摘要 (Ⅰ)Abstract (Ⅱ)第一章卧式数控车床简介 (1)1.1数控车床简介 (1)1.2 CK6140介绍及设计说明 (2)1.3设计任务 (3)第二章 CK6140总体设计计算 (6)2.1总体设计要求 (6)2.2机床的总体布局的确定 (7)2.3换向方向的选择 (7)2.4开停方式选择 (8)2.5 制动方式选择 (8)2.6 齿轮布置与排布 (8)2.7 变速方式选择 (9)2.8进给系统的组成及选用 (10)第三章主变速箱总体设计 (12)3.1电机的选用 (12)3.2传动方案的拟定 (15)3.3确定各级的转速.................................... 错误!未定义书签。
机床课程设计指导书(伺服进给系统)

第一章机床课程设计的目的、内容和要求§1-1 目的数控机床课程设计,是在数控机床设计课程之后进行的实践性教学环节。
其目的在于通过数控机床伺服进给系统的结构设计,使学生在拟定进给传动及变速等的结构方案过程中得到设计构思、方案分析、结构工艺性、CAD制图、设计计算、编写技术文件、查阅技术资料等方面的综合训练,建立正确的设计思想,掌握基本的设计方法,培养学生初步的结构设计和计算能力。
§1-2设计内容一、运动设计根据给定机床的性能要求、用途及精度标准,拟订传动结构方案,并计算降速比,确定传动方式,滚珠丝杠的选择计算。
包括滚珠丝杠临界转速的计算,反向死区误差的计算等。
二、动力设计根据给定机床确定传动方案后,画出结构草图,并计算传动件的负载惯量,并折算到电机轴上的转动惯量、力矩等是否在电机允许的范围内,并验算传动装置的综合拉压刚度。
三、结构设计进行伺服进给系统的变速箱、丝杠进给部分的结构设计,即绘制装配图和零件工作图。
§1-3 要求一、部件装配图部件装配图用以表明该部件的全部结构、机构工作原理、每个零件的功用、形状、尺寸、位置、相互连接的方法、配合性质及运动关系。
零件要标注件号(标准件标明标准代号、非标准件编注图号及材料代号)、参数和数量。
装配图包括伺服进给系统总装配图及消隙齿轮箱展开图及齿轮箱的横向剖视图,表明各轴的空间位置关系允许局部剖视。
二、设计计算说明书设计计算说明书用以论证设计方案的正确性,是整个设计的依据,主要步骤如下:1、机床的规格及用途;2、运动设计计算及说明;3、动力设计计算及说明;4、结构设计的说明;5、其它需要说明及论证的问题;6、参考文献。
计算说明书的篇幅不得少于一万字,计算机打印,正文用五号字、楷书,标题用四号黑体字。
要求论据充分、计算正确、叙述简明、合乎逻辑、语句通顺、图表清晰。
说明书中要附以传动原理图。
说明书后须附有参考文献目录,作者、书刊名称、出版社和出版年份。
数控机床的伺服系统

第七章 数控机床的伺服系统
但直流电机有电刷,限制了转速的提高,而且结构复杂, 价格也高。进入80年代后,由于交流电机调速技术的突破,交 流伺服驱动系统进入电气传动调速控制的各个领域。交流伺服 电机,转子惯量比直流电机小,动态响应好。而且容易维修, 制造简单,适合于在较恶劣环境中使用,易于向大容量、高速 度方向发展,其性能更加优异,已达到或超过直流伺服系统, 交流伺服电机已在数控机床中得到广泛应用。
第七章 数控机床的伺服系统
进给伺服系统的作用:接受数控装臵发出的进给速度和位 移指令信号,由伺服驱动装臵作一定的转换和放大后,经伺服 电机(直流、交流伺服电机、功率步进电机等)和机械传动机 构,驱动机床的工作台等执行部件实现工作进给或快速运动。 数控机床的进给伺服系统能根据指令信号精确地控制执行 部件的运动速度与位臵,以及几个执行部件按一定规律运动所 合成的运动轨迹。如果把数控装臵比作数控机床的“大脑”, 是发布“命令”的指挥机构,那么伺服系统就是数控机床的 “四肢”,是执行“命令”的机构,它是一个不折不扣的跟随 者。
第七章 数控机床的伺服系统
二、步进电机工作原理
步进电机伺服系统是典型的开环控制系统,在此系统中, 步进电机受驱动线路控制,将进给脉冲序列转换成为具有一 定方向、大小和速度的机械转角位移,并通过齿轮和丝杠带 动工作台移动。进给脉冲的频率代表了驱动速度,脉冲的数 量代表了位移量,而运动方向是由步进电机的各相通电顺序 来决定,并且保持电机各相通电状态就能使电机自锁。但由 于该系统没有反馈检测环节,其精度主要由步进电机来决定, 速度也受到步进电机性能的限制。
第七章 数控机床的伺服系统
直线电动机的实质是把旋转电动机沿径向剖开,然后拉直 演变而成,利用电磁作用原理,将电能直接转换成直线运动动 能的一种推力装臵,是一种较为理想的驱动装臵。在机床进给 系统中,采用直线电动机直接驱动与旋转电动机的最大区别是 取消了从电动机到工作台之间的机械传动环节,把机床进给传 动链的长度缩短为零。正由于这种传动方式,带来了旋转电动 机驱动方式无法达到的性能指标和优点。由于直线电动机在机 床中的应用目前还处于初级阶段,还有待进一步研究和改进。 随着各相关配套技术的发展和直线电动机制造工艺的完善,相 信用直线电动机作进给驱动的机床会得到广泛应用。
第4章 数控机床伺服系统
第4章 数控机床伺服系统
第4章 数控机床伺服系统 工作原理:假设是单三拍通电工作方式。 (1)A 相通电时,定子A 相的五个小齿和转子对 齐。此时,B 相和 A 相空间差120,含 1 120/9 = 13 齿 3 2 A 相和 C 相差240,含240/ 9 = 26 个 3 齿。所以,A 相的转子、定子的五个小齿对 齐时,B 相、C 相不能对齐,B相的转子、 定子相差 1/3 个齿(3),C相的转子、定 子相差2/3个齿(6)。
mz2 k
式中:n —转速(r/min); f —控制脉冲频率,即每秒输入步进电动机的脉冲数; 由上式可知:工作台移动的速度由指令脉冲的频率所控制。
第4章 数控机床伺服系统 特点:
(1)来一个脉冲,转一个步距角。
(2)控制脉冲频率,可控制电机转速。
(3)改变脉冲顺序,改变方向。
种类:
有励磁式和反应式两种。两种的区别在于励磁式步进电机的转 子上有励磁线圈,反应式步进电机的转子上没有励磁线圈。
第4章 数控机床伺服系统
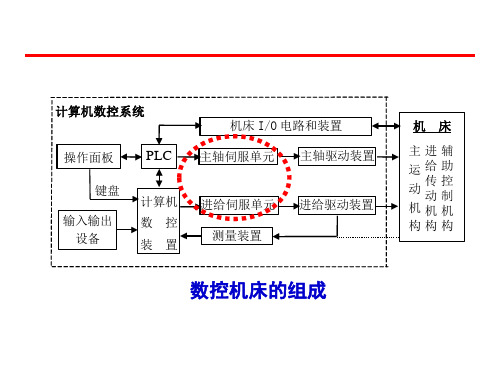
计算机数控系统 机床 I/O 电路和装置 操作面板 键盘 输入输出 设备 机 床
PLC
计算机 数 装 控 置
主轴伺服单元
主轴驱动装置
进给伺服单元 测量装置
进给驱动装置
主进辅 运给助 传控 动 动制 机机机 构构构
数控机床的组成
第4章 数控机床伺服系统
第4章
数控机床伺服系统
第4章 数控机床伺服系统
360o s mz2 k
第4章 数控机床伺服系统
每个步距角对应工作台一个位移值,这个位移值称为脉 冲当量。 因此,只要控制指令脉冲的数量即可控制工作台移动的 位移量。步距角越小,它所达到的位置精度越高,因此实际 使用的步进电动机一般都有较小的步距角。 步进电动机的转速公式为:n 60 f
数控机床的进给伺服系统ppt课件

稳定性:指输出速度的波动要少,尤其是在低
速时的平稳性显得特别重要。
精选编辑ppt
5
2. 输出位置精度要高 ▢ 静态:定位精度和重复定位精度要高,即定
位误差和重复定位误差要小。(尺寸精度) ▢ 动态:跟随精度,这是动态性能指标,用跟
随误差表示。 (轮廓精度) ▢ 灵敏度要高,有足够高的分辩率。
精选编辑ppt
精选编辑ppt
9
第二节 进给伺服驱动系统
一、概述
1. 进给伺服驱动系统由进给伺服系统中的 驱动电 机及其控制和驱动装置组成。
2. 驱动电机是进给系统的动力部件,它提供执行 部分运动所需的动力,在数控机床上常用的电 机有:
步进电机
直流伺服电机
交流伺服电机
直线电机
精选编辑ppt
10
3. 速度单元是上述驱动电机及其控制和驱动装置,通 常驱动电机与速度控制单元是相互配套供应的, 其性能参数都是进行了相互匹配,这样才能获得 高性能的系统指标。
Z1
t
34
解: (1)由计算脉冲当量:
L0
360
4. 速度控制单元主要作用:接受来自位置控制单元的 速度指令信号,对其进行适当的调节运算(目的是 稳速),将其变换成电机转速的控制量(频率,电压 等),再经功率放大部件将其变换成电机的驱动电 量,使驱动电机按要求运行。
即,调节、变换、功放。
精选编辑ppt
11
5. 进给驱动系统的特点(与主运动(主 轴)系统比较):
。
√“三拍”——每一拍转子转过一个步距角,这样“三
拍”是指通电换接三次后完成一个通电周期。 ➢三相六拍通电方式 ——即按A AB B BC C CA
相序通电。(见下图)
数控机床的伺服系统

第6章 数控机床的伺服系统
伺服驱动装置
位置控制模块 速度控制单元
工作台 位置检测
速度环 速度检测 位置环
伺服电机
测量反馈
图6-1 闭环进给伺服系统结构
数控机床闭环进给系统的一般结构如图,这是一个双闭环系统,内 环为速度环,外环为位置环。速度环由速度控制单元、速度检测装置等构成。 速度控制单元是一个独立的单元部件,它是用来控制电机转速的,是速度控 制系统的核心。速度检测装置有测速发电机、脉冲编码器等。位置环是由 CNC装置中的位置控制模块、速度控制单元、位置检测及反馈控制等部分组 成。
第6章 数控机床的伺服系统
A C1 B4 2 B 3C A
逆时针转30º
C 4 B
A 1 2 3 A
B
C 1 B
A 2
B 3 C
C
逆时针转30º
4 A
第6章 数控机床的伺服系统
采用三相双三拍控制方式,即通电顺序按AB→BC→CA→AB(逆时针 方向)或AC→CB→BA→AC(顺时针方向)进行,其步距角仍为30。由于 双三拍控制每次有二相绕组通电,而且切换时总保持一相绕组通电,所以 工作比较稳定。
第6章 数控机床的伺服系统
设 A 相首先通电,转子齿与定子 A 、 A′ 对齐(图 3a )。然后在 A 相继续通电的情 况下接通 B 相。这时定子 B 、 B′ 极对转子 齿 2 、 4 产生磁拉力,使转子顺时针方向转 动,但是 A 、 A′ 极继续拉住齿 1 、 3 ,因 此,转子转到两个磁拉力平衡为止。这时转 子的位置如图 3b 所示,即转子从图 (a) 位 置顺时针转过了 15° 。接着 A 相断电, B 相继续通电。这时转子齿 2 、 4 和定子 B 、 B′ 极对齐(图 c ),转子从图 (b) 的位置又 转过了 15° 。其位置如图 3d 所示。这样, 如果按 A→A 、 B→B→B 、 C→C→C 、 A→A… 的顺序轮流通电,则转子便顺时针 方向一步一步地转动,步距角 15° 。电流 换接六次,磁场旋转一周,转子前进了一个 齿距角。如果按 A→A 、 C→C→C 、 B→B→B 、 A→A… 的顺序通电,则电机 转子逆时针方向转动。这种通电方式称为六 拍方式。
数控机床进给系统设计
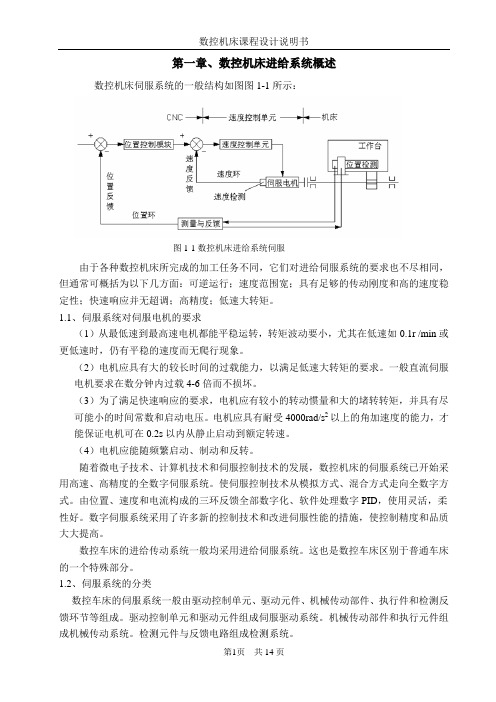
第一章、数控机床进给系统概述数控机床伺服系统的一般结构如图图1-1所示:图1-1数控机床进给系统伺服由于各种数控机床所完成的加工任务不同,它们对进给伺服系统的要求也不尽相同,但通常可概括为以下几方面:可逆运行;速度范围宽;具有足够的传动刚度和高的速度稳定性;快速响应并无超调;高精度;低速大转矩。
1.1、伺服系统对伺服电机的要求(1)从最低速到最高速电机都能平稳运转,转矩波动要小,尤其在低速如0.1r /min或更低速时,仍有平稳的速度而无爬行现象。
(2)电机应具有大的较长时间的过载能力,以满足低速大转矩的要求。
一般直流伺服电机要求在数分钟内过载4-6倍而不损坏。
(3)为了满足快速响应的要求,电机应有较小的转动惯量和大的堵转转矩,并具有尽可能小的时间常数和启动电压。
电机应具有耐受4000rad/s2以上的角加速度的能力,才能保证电机可在0.2s以内从静止启动到额定转速。
(4)电机应能随频繁启动、制动和反转。
随着微电子技术、计算机技术和伺服控制技术的发展,数控机床的伺服系统已开始采用高速、高精度的全数字伺服系统。
使伺服控制技术从模拟方式、混合方式走向全数字方式。
由位置、速度和电流构成的三环反馈全部数字化、软件处理数字PID,使用灵活,柔性好。
数字伺服系统采用了许多新的控制技术和改进伺服性能的措施,使控制精度和品质大大提高。
数控车床的进给传动系统一般均采用进给伺服系统。
这也是数控车床区别于普通车床的一个特殊部分。
1.2、伺服系统的分类数控车床的伺服系统一般由驱动控制单元、驱动元件、机械传动部件、执行件和检测反馈环节等组成。
驱动控制单元和驱动元件组成伺服驱动系统。
机械传动部件和执行元件组成机械传动系统。
检测元件与反馈电路组成检测系统。
进给伺服系统按其控制方式不同可分为开环系统和闭环系统。
闭环控制方式通常是具有位置反馈的伺服系统。
根据位置检测装置所在位置的不同,闭环系统又分为半闭环系统和全闭环系统。
半闭环系统具有将位置检测装置装在丝杠端头和装在电机轴端两种类型。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
前言 (3)1 机床进给传动控制方向的选择 (4)1.1 开环控制系统 (4)1.2 闭环控制系统 (4)1.3 半闭环控制系统 (4)2 传动系统的设计 (5)2.1 直联传动系统 (5)2.2 带传动系统 (5)2.3 传动系统图 (5)3 数控车床伺服进给系统X 轴设计 (6)3.1 确定滚珠丝杠副的导程()mm P h (6)3.2 确定当量转速与当量载荷 (6)3.3 预期额定动载荷()N C am (7)3.4 确定允许的最小螺纹底径 (8)3.5 确定滚珠丝杠副的规格代号 (9)3.6 确定滚珠丝杠副预紧力()N F p (10)3.7 对预拉伸的滚珠丝杠副 (10)3.8 确定滚珠丝杠副支承用的轴承代号、规格 (10)3.9 滚珠丝杠副工作图设计 (11)3.10 伺服电动机的选择 (11)3.11 传动系统刚度 (12)4 验算 (14)4.1 传动系统刚度验算及滚珠丝杠副的精度选择 (14)4.2 验算滚珠丝杠副临界压缩载荷()N F c (15)4.3 验算滚珠丝杠副的临界转速()min n n c (15)4.4 验算n D (15)4.5 基本轴向额定静载荷oa C 验算: (16)4.6 强度验算 (16)5. 数控机床伺服进给系统控制部分总体方案设计 ...........错误!未定义书签。
5.1任务分析 ..................................................................错误!未定义书签。
5.2方案设计 ..................................................................错误!未定义书签。
6.数控机床伺服进给系统硬件电路设计 .............................错误!未定义书签。
6.1主电路设计 ..............................................................错误!未定义书签。
6.2控制电路设计 ..........................................................错误!未定义书签。
6.3端子分配图 ..............................................................错误!未定义书签。
6.4端子分配图 (20)7.数控机床伺服进给系统软件部分设计 .............................错误!未定义书签。
7.1流程图设计 ..............................................................错误!未定义书签。
7.2 PLC程序....................................................................错误!未定义书签。
结束语 (17)参考文献35前言数控机床的伺服进给系统是指机床移动部件的位置和速度作为控制量的自动控制系统.它接收CNC系统的插补指令,将插补脉冲转化为机械位移.数控车床的伺服进给系统是数控装置与机床本体间电传动联系的环节,也是控制系统的执行部分,数控机床的性能在很大程度上取决于伺服进给系统的性能.机床伺服进给系统的作用是接受数控装置发出的进给速度和位移指令信号,由伺服驱动装置做一定的转换和放大后,经过伺服电机,机械传动机构,驱动机床的工作台等执行部件实现工作进给或快速运动.为确保机床的的加工精度,一般要求机床进给伺服系统具有可逆性,高精度,调速范围宽,快速反应并无超调,低速大转矩等特点,本设计从伺服进给系统部分入手,完成整体设计.1 机床进给传动控制方向的选择1.1 开环控制系统开环控制系统是数控机床中最简单的伺服系统,执行元件一般为步进电机。
开环进给伺服系统的精度较低,很难保证较高的位置精度,若要保证一定的定位精度的话,则对于影响定位精度的传动装置的刚度、摩擦、惯量、间隙等的要求必须很高,但由于其结构简单,易于调整,在精度要求不太高的场合中得到较广泛的应用。
1.2 闭环控制系统因为开环系统的精度不能很好地满足数控机床的要求,所以为了保证精度,最根本的办法是采用闭环控制方式。
闭环控制系统是采用直线型位置检测装置对数控机床工作台位移进行直接测量并进行反馈控制的位置伺服系统。
由于可以补偿机械传动装置中各种误差,间隙及干扰的影响,定位精度高。
1.3 半闭环控制系统采用旋转型角度测量元件(脉冲编码器、旋转变压器、圆感应同步器等)和伺服电动机按照反馈控制原理构成的位置伺服系统,称作半闭环控制系统。
半闭环控制系统的检测装置有两种安装方式:一种是把角位移检测装置安装在丝杠末端;另一种是把角位移检测装置安装在电动机轴端。
定位精度比开环控制系统高,但比闭环控制系统低。
数控机床要求达到预定的精度要求以外,根据需求,并且考虑到经济的效益,还要求具有良好的稳定性和快速响应能力。
基于这些要求,本设计采用半闭环控制方式。
2 传动系统的设计2.1 直联传动系统通过联轴器将电机和轴连接起来的方式称为直联传动。
其具有运行可靠、故障率低,不丢转,效率高等优点。
但其转数固定,不宜准确地工作在所要求的工况上。
2.2 带传动系统可用于两轴中心距离较大的传动,其具有弹性,可缓和冲击和振动载荷,运转平稳,无噪声,当过载时,带即在轮上打滑,可防止其他零件损坏;4,结构简单,设备费低,维护方便等优点。
结合本课设要求选用带传动方式。
2.3 传动系统图图2.1传动系统图3 数控车床伺服进给系统X 轴设计X 轴进给行程510mm进给速度1-5100mm/min快移速度10m/min最大进给力6100N定位精度0.012mm/300mm重复定位精度0.006mm横向上滑板上刀架重量81Kg3.1 确定滚珠丝杠副的导程()mm P h由溜板的最高移动速度m ax V ,电动机最高转速m ax n ,确定h P 。
因电机与杠直联,则3m axm ax10⨯=n VP h(3.1)min 9max m V =min 1500max m n =i=16101500191033maxmax =⨯⨯=⨯=in V P h (mm)取8=h P mm3.2 确定当量转速与当量载荷min /37583000max max r p Vn h===min/1.081min min r p V n h ===N F 2.4003800004.04000max =⨯+=N F 2.3800004.0min =⨯=min /1.081min r p V n h m === min /6.18716300012max max r n n n m =+=+= min /9.266932.322.400332max max r F F F m =+⨯=+= 3.3 预期额定动载荷()N C am(1)按滚珠丝杠副的预期工作时间估算ca w m h m am f f f F L n C 100603= (3-2) h L ——预期工作时间(小时);a f ——精度系数;c f ——可靠性系数;w f ——负荷系数。
按表3-1查得:轻微冲击,取2.1=w f表3-1轻微冲击按表3-2查得:精度等级1~3级,取1=a f表3-2精度等级按表3-3查得:可靠性97%,取1=c f表3-3可靠性已知:20000=h L hN f f f F L n C c a w m h m am 1.19490111002.19.2669200006.187601006033=⨯⨯⨯⨯⨯⨯== (2)拟采用预紧滚珠丝杠副,按最大负载m ax F 计算:max F f C e am =式中: e f ——预加负荷系数。
按表3-4查得:中预载,取7.6=e f表3-4预加负载类型N F f C e am 4.268212.40037.6max =⨯==取以上两种结果中的最大值N C am 4.26821=3.4 确定允许的最小螺纹底径(1)估算滚珠丝杠允许的最大()m m μδ1)机床或机械装置的伺服系统精度大多在空载下检验。
空载时作用在滚珠丝杠副上的最大轴向工作载荷是静摩擦力0F 。
移动部件在min K 处起动和返向时,由于0F 方向变化将产生误差因素,一般占重复定位精度的(1/2~1/3)。
所以规定滚珠丝杠副允许的最大轴向变形: ()41~31≤m δ重复定位精度。
已知重复定位精度为6m μ,则 ()641~31⨯≤m δ,取2=m δμm2)影响定位精度最主要的因素是滚珠丝杠副的精度,其次是滚珠丝杠本身的拉压弹性变形(因这种弹性变形随滚珠螺母在滚珠杠上的位置变化()51~41≤m δ而变化),以及滚珠丝杠副摩擦力矩的变化等。
一般估算是定位精度。
()1251~41⨯≤m δ,取3=m δμm即:取两种结果中最小值 2=m δμm估算滚珠丝杠副的最小螺纹底径()mm d m 2 (3-3)丝杠要求预拉伸,取两端固定的支承形式:E ——杨式弹性模量;m δ——估算的滚珠丝杠最大允许轴向变形量()m μ;0F ——导轨静摩擦力(N ),W F 00μ= (0μ为静摩擦系数);L ——滚珠螺母至滚珠丝杠两个固定支承的距离。
()()h P L 14~102.1~1.1+≈行程。
mm L 4268123001.1=⨯+⨯=N W F 2.3010==μ∴ mm L F L F d m m m 02.124262.3039.0039.01010002=⨯⨯==E =δπδ 3.5 确定滚珠丝杠副的规格代号根据传动方式及使用情况,按照样本可以确定滚珠螺母型式。
按照已估算出的h P ,am C 可在样本中先查出对应的滚珠丝杠底径2d ,额定动载荷a C ,应注意m d d 22≥,am a C C ≥但不宜过大,否则会使滚珠丝杠副的转动惯量偏大,结构尺寸也偏大。
接着再确定公称直径,循环圈数,滚珠螺母的规格代号及有关的安装连接尺寸。
1)选内循环浮动式法兰,直筒双螺母型垫片预紧形式2)由计算出的h P ,am C ,m d 2在样本中取相应规格的滚珠丝杠副m m m L F L F d δπδ002039.01010=E =FFZD4008-5 ,8=h P ,N C C am a 4.2682130700=>=mm d d m 02.19.3422=>=3.6 确定滚珠丝杠副预紧力()N F p预紧螺母型式的滚珠丝杠副时需规定预紧力p F 。
当最大轴向工作载荷m ax F 能确定时,max 31F F p =(3-4) N F F 3.42031max ==∴ N F F p 4.13342.40033131max =⨯== 3.7 对预拉伸的滚珠丝杠副(1)计算行程补偿值()m C μ式中: t ∆——温度变化值C C ︒︒3~2;mm L u 380108300=⨯+=mm tL C u 6631011210103805.28.11108.11⨯=⨯⨯⨯=⨯∆=(2)预拉伸力()N F tN td F t 8.59379.345.295.195.1222=⨯⨯=∆=,3.8 确定滚珠丝杠副支承用的轴承代号、规格(1)轴承所承受的最大轴向载荷()N F B maxN F F F t B 99412.40038.5937max max =+=+=(2)轴承类型两端固定的支承形式。