倒立摆与自动控制原理实验
直线一级倒立摆的自动起摆与稳摆控制

直线一级倒立摆的自动起摆与稳摆控制(Simulink仿真)通过对倒立摆系统的力学及运动学分析,建立系统的非线性数学模型为可见,直线一级倒立摆为单输入双输出系统,利用Simulink可建立上式的框图模型,如图1所示。
图1 直线一级倒立摆系统的非线性Simulink模型倒立摆的起摆问题,是控制理论中的一个经典实验,其实质是倒立摆系统从一个稳定的平衡状态(垂直向下)在外力的作用下自动转移到另一个平衡状态(垂直向上)。
在这个过程中,要求起摆快速,但又不能过于超调。
由于输入、输出之间的非线性,许多常用的线性控制理论都不适用。
基于非线性理论,目前常用的几种起摆方法为:Bang-Bang控制、能量控制、仿人智能控制等。
这里采用Bang-Bang控制作为起摆方法,LQR控制作为稳摆方法,Simulink框图如图2所示。
图2 倒立摆自动起摆控制Simulink框图(Bang-Bang + LQR)图2中,子系统“Inverted Pendulum”是直线一级倒立摆的非线性模型,如图1所示;S函数“ang_proc”模块用于摆杆角度的处理,即将任意角度信号转换为“ -π ~ π”之间的对应值;子系统“Bang-Bang Controller”为Bang-Bang控制器;子系统“LQR Controller”为LQR 控制器。
双击“Bang-Bang Controller”模块可打开Bang-Bang控制器框图如下:图3 Bang-Bang控制器框图图3中,bang_controller是为实现Bang-Bang控制算法而编写的S函数,信号Ang_s是Bang-Bang控制切换角,F_bang是Bang-Bang控制作用力。
双击“LQR Controller”子系统,打开LQR控制器框图如下:图4 LQR控制器框图运行图2中的仿真框图,则基于Bang-Bang控制和LQR控制算法的直线一级倒立摆自动起摆控制效果如图5所示。
固高科技《倒立摆与自动控制原理实验》

固高科技《倒立摆与自动控制原理实验》《倒立摆与自动控制原理实验》是一个固高科技开展的实验项目,旨在培养学生对自动控制原理的理解和应用能力。
该实验通过搭建倒立摆的物理模型,利用自动控制原理来实现倒立摆的平衡控制。
以下是对该实验项目的介绍,包括实验目的、原理以及实验步骤。
实验目的:1.理解自动控制原理的基本概念和应用。
2.掌握使用固高科技控制系统进行实验的方法。
3.了解倒立摆的特性和控制方法。
4.通过实验,提高学生的动手实践能力和创新思维。
实验原理:倒立摆是一个经典的自动控制系统,由一个摆杆和一个旋转关节组成。
摆杆可以沿着旋转关节旋转,目标是使摆杆保持直立状态。
倒立摆系统可以看作是一个负反馈控制系统,输入为倒立摆的角度和角速度,输出为控制摆杆旋转的力矩。
通过调节输入和输出之间的关系,可以实现倒立摆的平衡控制。
实验步骤:1.准备实验所需的材料和仪器,包括固高科技控制系统、倒立摆模型、电源等。
2.搭建倒立摆的物理模型,将摆杆固定在旋转关节上,并与驱动电机相连。
3.将摆杆的角度和角速度传感器与固高科技控制系统相连。
4.将固高科技控制系统通过USB接口连接到计算机上,并打开控制系统控制软件。
5.运行控制软件,配置摆杆的初始角度和目标角度,并设置控制参数。
6.开始实验,观察摆杆的运动状态,尝试调节控制参数以实现倒立摆的平衡控制。
7.记录实验结果,分析控制参数对倒立摆平衡控制的影响。
通过以上步骤,可以实现对倒立摆的平衡控制。
学生通过实际操作和观察,加深对自动控制原理的理解和应用。
此外,他们还可以探索倒立摆系统的多种控制方法和策略,提高自己的创新能力。
总结:《倒立摆与自动控制原理实验》是一个很有意义的实验项目,旨在培养学生对自动控制原理的理解和应用能力。
通过实际操作和观察,学生可以深入了解倒立摆的特性和控制方法,并通过调节控制参数实现倒立摆的平衡控制。
通过这个实验,学生不仅可以提高动手实践能力,还可以培养创新思维,为将来的研究和工作打下坚实的基础。
(完整版)倒立摆实验报告

(完整版)倒立摆实验报告-CAL-FENGHAI.-(YICAI)-Company One1机械综合设计与创新实验(实验项目一)二自由度平面机械臂三级倒立摆班级:姓名:学号:指导教师:时间:综述倒立摆装置是机器人技术、控制理论、计算机控制等多个领域、多种技术的有结合,被公认为自动控制理论中的典型实验设备,也是控制理论教学和科研中不可多得的典型物理模型。
倒立摆的典型性在于:作为实验装置,它本身具有成本低廉、结构简单、便于模拟、形象直观的特点;作为被控对象,它是一个高阶次、不稳定、多变量、非线性、强耦合的复杂被控系统,可以有效地反映出控制中的许多问题;作为检测模型,该系统的特点与机器人、飞行器、起重机稳钩装置等的控制有很大的相似性[1]。
倒立摆系统深刻揭示了自然界一种基本规律,即一个自然不稳定的被控对象,运用控制手段可使之具有良好的稳定性。
通过对倒立摆系统的研究,不仅可以解决控制中的理论问题,还能将控制理论所涉及的三个基础学科,即力学、数学和电学(含计算机)有机的结合起来,在倒立摆系统中进行综合应用。
在多种控制理论与方法的研究和应用中,特别是在工程实践中,也存在一种可行性的试验问题,将其理论和方法得到有效的经验,倒立摆为此提供一个从控制理论通往实践的桥梁[2]。
因此对倒立摆的研究具有重要的工程背景和实际意义。
从驱动方式上看,倒立摆模型大致可分为直线倒立摆模型、旋转倒立摆模型和平面倒立摆模型。
对于每种模型,从摆杆的级数上又可细分为一级倒立摆、二级倒立摆和多级倒立摆[3]。
目前,国内针对倒立摆的研究主要集中在运用倒立摆系统进行控制方法的研究与验证,特别是针对利用倒立摆系统进行针对于非线性系统的控制方法及理论的研究。
而倒立摆系统与工程实践的结合主要体现在欠驱动机构控制方法的验证之中。
此外,倒立摆作为一个典型的非线性动力系统,也被用于研究各类非线性动力学问题。
在倒立摆系统中成功运用的控制方法主要有线性控制方法,预测控制方法及智能控制方法三大类。
固高科技《倒立摆与自动控制原理实验》
固高科技《倒立摆与自动控制原理实验》《倒立摆与自动控制原理实验》是固高科技中一门重要的实验课程。
倒立摆是一种常见的动力学系统模型,可以应用于机器人控制、姿态稳定控制、飞行器控制等领域。
自动控制原理是掌握电路、机器、仪器等系统控制的基础,对于机械、电子、自动化等专业的学生来说都是必学的课程。
此实验旨在通过实践操作,帮助学生理解倒立摆的原理和自动控制原理,并培养他们的实验操作能力和问题解决能力。
下面将简要介绍实验的目的、原理和步骤。
实验目的:1.理解倒立摆的原理和动力学方程;2.学习掌握自动控制原理;3.掌握实验操作技巧;4.提高问题解决能力和团队合作意识。
实验原理:倒立摆是一个不稳定的系统,需要通过控制来保持平衡。
实验中,用电机驱动倒立摆杆旋转,通过两个位置传感器检测倒立摆杆的角度和角速度,并将这些信号经过控制器进行处理后控制电机。
通过调整电机输出的力矩,使倒立摆保持在垂直位置。
自动控制原理是实现倒立摆控制的基础。
对于这个系统来讲,可以采用经典的PID控制算法。
PID控制器根据当前倒立摆的角度误差、角速度误差和积分误差来计算控制信号,实时调整电机输出的力矩,使倒立摆保持在稳定的位置。
实验步骤:1.搭建倒立摆实验平台:根据实验材料提供的装配手册,按图纸要求完成倒立摆的搭建。
注意调整杆件位置,使倒立摆保持平衡。
2.连接传感器和控制器:将位置传感器和角速度传感器连接到控制器,确保信号传输的可靠性。
3.设置控制参数:在控制器上设置PID控制器的参数,包括比例系数Kp、积分系数Ki和微分系数Kd。
根据实验要求,调整参数值。
4.进行控制实验:启动电机,观察倒立摆的运动情况。
根据实际情况,调整控制器的参数,使倒立摆保持在平衡位置。
5.实验数据处理:记录实验过程中的数据,包括控制器的输出信号、倒立摆的角度和角速度等数据。
通过数据分析,评估控制效果和控制器参数的优化方法。
总结:《倒立摆与自动控制原理实验》是一门理论与实践相结合的课程,通过实验操作,学生能够深入理解倒立摆和自动控制原理,并培养他们的实验操作能力和问题解决能力。
自动控制实验报告——球杆系统-倒立摆-bupt概要

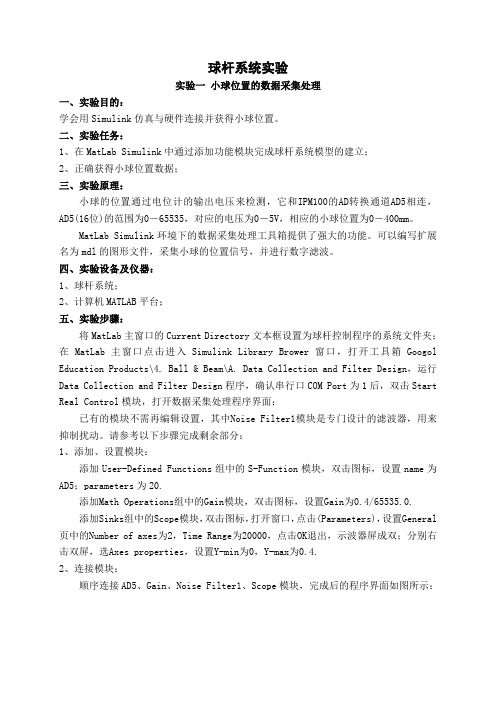
球杆系统实验实验一小球位置的数据采集处理一、实验目的:学会用Simulink仿真与硬件连接并获得小球位置。
二、实验任务:1、在MatLab Simulink中通过添加功能模块完成球杆系统模型的建立;2、正确获得小球位置数据;三、实验原理:小球的位置通过电位计的输出电压来检测,它和IPM100的AD转换通道AD5相连,AD5(16位)的范围为0-65535,对应的电压为0-5V,相应的小球位置为0-400mm。
MatLab Simulink环境下的数据采集处理工具箱提供了强大的功能。
可以编写扩展名为mdl的图形文件,采集小球的位置信号,并进行数字滤波。
四、实验设备及仪器:1、球杆系统;2、计算机MATLAB平台;五、实验步骤:将MatLab主窗口的Current Directory文本框设置为球杆控制程序的系统文件夹;在MatLab主窗口点击进入Simulink Library Brower窗口,打开工具箱Googol Education Products\4. Ball & Beam\A. Data Collection and Filter Design,运行Data Collection and Filter Design程序,确认串行口COM Port为1后,双击Start Real Control模块,打开数据采集处理程序界面;已有的模块不需再编辑设置,其中Noise Filter1模块是专门设计的滤波器,用来抑制扰动。
请参考以下步骤完成剩余部分:1、添加、设置模块:添加User-Defined Functions组中的S-Function模块,双击图标,设置name为AD5;parameters为20.添加Math Operations组中的Gain模块,双击图标,设置Gain为0.4/65535.0.添加Sinks组中的Scope模块,双击图标,打开窗口,点击(Parameters),设置General 页中的Number of axes为2,Time Range为20000,点击OK退出,示波器屏成双;分别右击双屏,选Axes properties,设置Y-min为0,Y-max为0.4.2、连接模块:顺序连接AD5、Gain、Noise Filter1、Scope模块,完成后的程序界面如图所示:图1.1.1 完成后的数据采集处理程序界面点击运行程序,双击Scope模块,显示滤波前后的小球位置-时间图,拨动小球在横杆上往返滚动,可得如下实验结果:图1.1.2 小球位置的数据采集处理六、实验总结通过这个实验、我学会了球杆系统模型的建立以及小球位置的获取。
倒立摆系统__实验设计报告

倒立摆系统__实验设计报告一、实验目的本实验旨在通过对倒立摆系统的研究与实验,探讨倒立摆的运动规律,并分析其特点和影响因素。
二、实验原理与方法1.实验原理倒立摆是指在重力作用下,轴心静止在上方的直立摆。
倒立摆具有自然的稳定性,能够保持在平衡位置附近,且对微小干扰具有一定的抵抗能力。
其本质是控制系统的一个重要研究对象,在自动控制、机器人控制等领域有广泛的应用。
2.实验方法(1)搭建倒立摆系统:倒立摆由摆杆、轴心和电机组成,摆杆在轴心上下运动,电机用于控制倒立摆的运动。
(2)调节电机控制参数:根据实验需要,调节电机的参数,如转速、力矩等,控制倒立摆的运动状态。
(3)记录数据:通过相机或传感器等手段,记录倒立摆的位置、速度、加速度等相关数据,用于后续分析。
(4)分析数据:根据记录的数据,分析倒立摆的运动规律、特点和影响因素,在此基础上进行讨论和总结。
三、实验步骤1.搭建倒立摆系统:根据实验需要,选取合适的材料和设备,搭建倒立摆系统。
2.调节电机参数:根据实验目的,调节电机的转速、力矩、控制信号等参数,使倒立摆能够在一定范围内保持平衡。
3.记录数据:利用相机或传感器等设备,记录倒立摆的位置、速度、加速度等相关数据。
4.分析数据:通过对记录的数据进行分析,研究倒立摆的运动规律和特点,并探讨影响因素。
5.总结讨论:根据实验结果,进行总结和讨论,对倒立摆的运动规律、特点和影响因素进行深入理解和探究。
四、实验设备与器材1.倒立摆系统搭建材料:包括摆杆、轴心、电机等。
2.记录数据设备:相机、传感器等。
五、实验结果与分析通过实验记录的数据,分析倒立摆的运动规律和特点,找出影响因素,并进行讨论和总结。
六、实验结论根据实验结果和分析,得出倒立摆的运动规律和特点,并总结影响因素。
倒立摆具有一定的稳定性和抵抗干扰的能力,在控制系统中具有重要的应用价值。
七、实验感想通过参与倒立摆系统的搭建和实验,深入了解了倒立摆的运动规律和特点,对控制系统有了更深刻的理解。
自动控制实验报告——球杆系统倒立摆bupt概要
球杆系统实验实验一小球位置的数据采集处理一、实验目的:学会用Simulink仿真与硬件连接并获得小球位置。
二、实验任务:1、在MatLab Simulink中通过添加功能模块完成球杆系统模型的建立;2、正确获得小球位置数据;三、实验原理:小球的位置通过电位计的输出电压来检测,它和IPM100的AD转换通道AD5相连,AD5(16位)的范围为0-65535,对应的电压为0-5V,相应的小球位置为0-400mm。
MatLab Simulink环境下的数据采集处理工具箱提供了强大的功能。
可以编写扩展名为mdl的图形文件,采集小球的位置信号,并进行数字滤波。
四、实验设备及仪器:1、球杆系统;2、计算机MATLAB平台;五、实验步骤:将MatLab主窗口的Current Directory文本框设置为球杆控制程序的系统文件夹;在MatLab主窗口点击进入Simulink Library Brower窗口,打开工具箱Googol Education Products\4. Ball & Beam\A. Data Collection and Filter Design,运行Data Collection and Filter Design程序,确认串行口COM Port为1后,双击Start Real Control模块,打开数据采集处理程序界面;已有的模块不需再编辑设置,其中Noise Filter1模块是专门设计的滤波器,用来抑制扰动。
请参考以下步骤完成剩余部分:1、添加、设置模块:添加User-Defined Functions组中的S-Function模块,双击图标,设置name为AD5;parameters为20.添加Math Operations组中的Gain模块,双击图标,设置Gain为0.4/65535.0.添加Sinks组中的Scope模块,双击图标,打开窗口,点击(Parameters),设置General 页中的Number of axes为2,Time Range为20000,点击OK退出,示波器屏成双;分别右击双屏,选Axes properties,设置Y-min为0,Y-max为0.4.2、连接模块:顺序连接AD5、Gain、Noise Filter1、Scope模块,完成后的程序界面如图所示:图1.1.1 完成后的数据采集处理程序界面点击运行程序,双击Scope模块,显示滤波前后的小球位置-时间图,拨动小球在横杆上往返滚动,可得如下实验结果:图1.1.2 小球位置的数据采集处理六、实验总结通过这个实验、我学会了球杆系统模型的建立以及小球位置的获取。
倒立摆实验报告

倒立摆实验报告机自82组员:李宗泽李航刘凯付荣倒立摆与自动控制原理实验一. 实验目得:1、运用经典控制理论控制直线一级倒立摆,包括实际系统模型得建立、根轨迹分析与控制器设计、频率响应分析、PID 控制分析等内容、2、运用现代控制理论中得线性最优控制LQR方法实验控制倒立摆3、学习运用模糊控制理论控制倒立摆系统4、学习MATLAB工具软件在控制工程中得应用5、掌握对实际系统进行建模得方法,熟悉利用MATLAB 对系统模型进行仿真,利用学习得控制理论对系统进行控制器得设计,并对系统进行实际控制实验,对实验结果进行观察与分析,非常直观得感受控制器得控制作用。
二、实验设备计算机及MATLAB、VC等相关软件固高倒立摆系统得软件固高一级直线倒立摆系统,包括运动卡与倒立摆实物倒立摆相关安装工具三.倒立摆系统介绍倒立摆就是机器人技术、控制理论、计算机控制等多个领域、多种技术得有机结合,其被控系统本身又就是一个绝对不稳定、高阶次、多变量、强耦合得非线性系统,可以作为一个典型得控制对象对其进行研究。
倒立摆系统作为控制理论研究中得一种比较理想得实验手段,为自动控制理论得教学、实验与科研构建一个良好得实验平台,以用来检验某种控制理论或方法得典型方案,促进了控制系统新理论、新思想得发展。
由于控制理论得广泛应用,由此系统研究产生得方法与技术将在半导体及精密仪器加工、机器人控制技术、人工智能、导弹拦截控制系统、航空对接控制技术、火箭发射中得垂直度控制、卫星飞行中得姿态控制与一般工业应用等方面具有广阔得利用开发前景.倒立摆已经由原来得直线一级倒立摆扩展出很多种类,典型得有直线倒立摆环形倒立摆,平面倒立摆与复合倒立摆等,本次实验采用得就是直线一级倒立摆。
倒立摆得形式与结构各异,但所有得倒立摆都具有以下得特性: 1)非线性2)不确定性3) 耦合性4) 开环不稳定性5)约束限制倒立摆控制器得设计就是倒立摆系统得核心内容,因为倒立摆就是一个绝对不稳定得系统,为使其保持稳定并且可以承受一定得干扰,需要给系统设计控制器,本小组采用得控制方法有:PID控制、双PID控制、LQR控制、模糊PID控制、纯模糊控制四.直线一级倒立摆得物理模型:系统建模可以分为两种:机理建模与实验建模。