基于电磁传感器的智能直立车控制系统设计[论文]
基于KEA128的电磁直立智能车控制系统设计

10.16638/ki.1671-7988.2018.21.010基于KEA128的电磁直立智能车控制系统设计叶身村,周庆,于振浩(山东理工大学,山东淄博255049)摘要:设计了一种以S9KEAZ128AMLK微控制器为核心控制单元,集环境感知、规划决策、智能行驶于一体的直立智能车系统。
在硬件系统设计方面,设计并实现了电源稳压电路、电机H桥驱动电路和电磁检测电路来保障智能车的稳定行驶。
在软件系统设计方面,使用卡尔曼滤波对陀螺仪和加速度计的数据进行融合得到精确的姿态倾角来进行智能车的平衡控制和速度控制,同时电磁检测电路采集道路信息实现导航。
关键词:S9KEAZ128AMLK;直立智能车;电磁检测电路;卡尔曼滤波中图分类号:TP242 文献标识码:A 文章编号:1671-7988(2018)21-27-02Design of Electromagnetic Vertical Intelligent Vehicle Control SystemBased on KEA128Ye Shencun , Zhou Qing, Yu Zhenhao( Shandong University of Technology, Shandong Zibo 255049 )Abstract:An upright smart car system with S9KEAZ128AMLK microcontroller as the core control unit and integrating environment awareness, planning decision and intelligent driving is designed. In the hardware system design, the power supply voltage regulator circuit, the motor H-bridge drive circuit and the electromagnetic detection circuit are designed and implemented to ensure the stable driving of the smart car. In the aspect of software system design, the Kalman filter is used to fuse the data of the gyroscope and the accelerometer to obtain the precise attitude tilt angle for the balance control and speed control of the smart car, and the electromagnetic detection circuit collects the road information to realize navigation. Keywords: S9KEAZ128AMLK; Upright smart car; Electromagnetic detection circuit; Kalman filterCLC NO.: TP242 Document Code: A Article ID: 1671-7988(2018)21-27-02引言随着科学技术的迅速发展,智能化和自动化技术越来越普及,智能化作为现代社会的新产物,是未来的发展方向,而智能车作为一门新兴的综合技术,在汽车电子领域有着广阔的前景,它是一种交叉和融合了多门学科的高新技术综合体,知识涉及面广。
智能直立车设计与控制
智能直立车设计与控制发布时间:2021-04-20T04:04:39.891Z 来源:《学习与科普》2021年1期作者:刘辉赵浩张璇钱超卢承领杨旭[导读] 本项目以电磁研究为背景,设计了直立车模电磁循迹系统。
系统设计采用了自顶向下的整体设计思想,以Freescale微控制芯片MCF5225X为核心,并以CodeWarriorIDE为系统的开发平台。
皖西学院电气与光电工程学院安徽省六安市 237012摘要:本项目以电磁研究为背景,设计了直立车模电磁循迹系统。
系统设计采用了自顶向下的整体设计思想,以Freescale微控制芯片MCF5225X为核心,并以CodeWarriorIDE为系统的开发平台。
硬件部分采用自主设计的主板电路、传感器电路以及驱动电路。
传感器电路采用LM358运放实现微弱信号放大,采用速度传感器MMA7260和加速度传感器陀螺仪(ENC-03)实现对车模状态的检测,驱动电路采用集成驱动芯片BTS7960B来实现对电机的有效驱动。
关键词:智能小车;电磁;循迹;主板电路;传感器1.前言智能小车,是一个集环境感知、规划决策,自动行驶等功能于一体的综合系统,它集中地运用了计算机、传感、信息、通信、导航及白动控制等技术,是典型的高新技术综合体。
智能车辆也叫无人车辆,是一个集环境感知、规划决策和多等级辅助驾驶等功能于一体的综合系统。
它具有道路障碍自动识别、自动报警、自动制动、自动保持安全距离、车速和巡航控制等功能。
智能车辆的主要特点是在复杂的道路情况下,能自动地操纵和驾驶车辆绕开障碍物并沿着预定的道路(轨迹)行进。
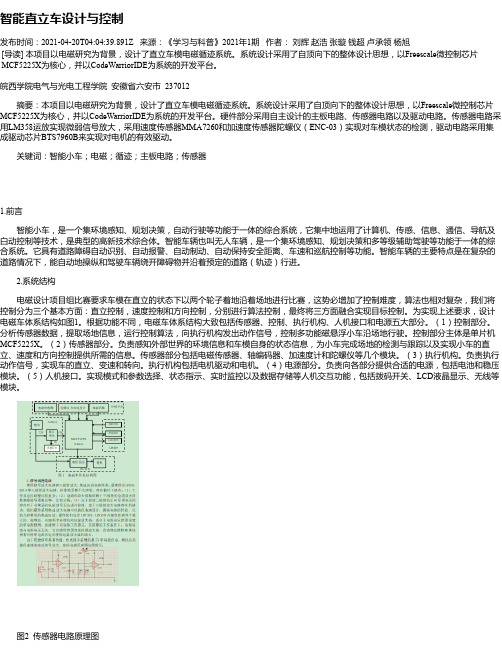
2.系统结构电磁设计项目组比赛要求车模在直立的状态下以两个轮子着地沿着场地进行比赛,这势必增加了控制难度,算法也相对复杂,我们将控制分为三个基本方面:直立控制,速度控制和方向控制,分别进行算法控制,最终将三方面融合实现目标控制。
为实现上述要求,设计电磁车体系结构如图1。
根据功能不同,电磁车体系结构大致包括传感器、控制、执行机构、人机接口和电源五大部分。
《2024年基于电磁信号的智能寻迹车设计》范文
《基于电磁信号的智能寻迹车设计》篇一一、引言随着科技的不断发展,智能寻迹车在工业、军事、救援、教育等领域的应用越来越广泛。
本文将介绍一种基于电磁信号的智能寻迹车设计,通过电磁信号进行定位和寻迹,实现了自动导航和精确控制,具有广阔的应用前景。
二、系统设计1. 总体设计本设计的智能寻迹车主要由车身、控制系统、电机驱动系统、电磁信号接收与处理模块等部分组成。
其中,控制系统是整个系统的核心,负责接收和处理电磁信号,控制电机驱动系统实现车辆的寻迹和导航。
2. 控制系统设计控制系统采用微控制器作为核心处理器,通过接收电磁信号接收与处理模块传来的信号,对电机驱动系统发出控制指令,实现车辆的寻迹和导航。
同时,控制系统还具有自我学习和优化功能,能够根据实际环境自动调整寻迹策略,提高寻迹精度和稳定性。
3. 电机驱动系统设计电机驱动系统采用直流电机和驱动器组成,通过控制器的指令驱动电机转动,实现车辆的移动和转向。
此外,电机驱动系统还具有过载保护和热保护功能,保证了车辆在复杂环境下的稳定性和安全性。
4. 电磁信号接收与处理模块设计电磁信号接收与处理模块是本设计的关键部分,负责接收周围环境的电磁信号并进行处理。
该模块采用高灵敏度传感器和信号处理电路,能够准确捕捉到周围的电磁信号,并通过控制器进行解析和处理,为车辆的寻迹和导航提供精确的依据。
三、工作原理本设计的智能寻迹车通过电磁信号接收与处理模块接收周围环境的电磁信号,经过处理后传输给控制系统。
控制系统根据信号的强度和方向等信息,发出控制指令给电机驱动系统,驱动车辆按照预设的路线进行寻迹和导航。
同时,控制系统还具有自我学习和优化功能,能够根据实际环境自动调整寻迹策略,提高寻迹精度和稳定性。
四、应用领域基于电磁信号的智能寻迹车具有广泛的应用前景。
它可以应用于工业生产中的物料搬运、生产线巡检等场景;在军事领域中可以用于战场侦察、物资运输等任务;在救援领域中可以用于灾区搜索、救援物资运输等场景;在教育领域中可以用于机器人教育、科技竞赛等活动。
基于KL25的直立智能车设计

基于KL25的直立智能车设计翁祥俊【摘要】文章采用了蓝宙电子KL25Z单片机作为控制芯片,实现小车直立、循迹、避障等多任务行驶。
利用陀螺仪和加速度计传感器测量角速度与重力加速度,通过卡尔曼滤波对其输出的信号进行融合,得到准确的倾角信息,从而稳定的控制小车的直立。
采用线性CCD传感器获取赛道信息,实现小车循迹。
利用编码器采集直立小车行驶速度信号,实现速度闭环控制。
通过一定的控制策略,小车能够顺利完成任务。
%This system utilizes a LanZhou KL25Z microcontroller as control core, implementing the car upright, tracking and obstacle avoidance of multitasking. Using gyroscope and accelerometer sensors measuring angular velocity and acceleration of gravity, through the kalman iflter tothe output signal of fusion, get accurate Angle information. That achieves the purpose of stable control of the car upright. The car is realized by using linear CCD sensors track information, tracking.Collection using encoder upright car speed signal to realize speed closed-loopcontrol.Through certain control strategy, the car would be able to complete the task.【期刊名称】《无线互联科技》【年(卷),期】2015(000)017【总页数】2页(P118-119)【关键词】KL25Z;传感器;PID控制算法;卡尔曼滤波【作者】翁祥俊【作者单位】浙江海洋学院,浙江舟山 316022【正文语种】中文随着现代电子技术的发展,智能化越来越成为我们生活中的焦点,智能直立小车也悄无声息的进入了人们的视野。
基于电磁传感器的智能车控制系统设计

基于电磁传感器的智能车控制系统设计
张茜;杨旭海;薛令阳
【期刊名称】《电子元器件应用》
【年(卷),期】2012(14)11
【摘要】文中介绍一种基于电磁传感器路径识别的智能车控制系统,系统采用Freescale16位单片机MC9S12XS128为核心控制器,利用4个电磁传感器构成的传感器阵列采集路面信息,单片机获得传感器采集的路面信息和车速信息后控制智能车的舵机转向,同时对直流电机进行调速,从而实现智能车沿给定的赛道快速平稳的行驶.实验证明:系统设计可靠,智能车运行良好.
【总页数】5页(P92-96)
【作者】张茜;杨旭海;薛令阳
【作者单位】石河子大学,新疆石河子832000;石河子大学,新疆石河子832000;石河子大学,新疆石河子832000
【正文语种】中文
【相关文献】
1.基于电磁传感器的智能车自主寻迹系统设计 [J], 师克;王洪军;李永科
2.基于电磁场寻线智能车传感器的布局及控制策略 [J], 杨阳;兰一星;袁靖
3.基于电磁传感器的智能车控制算法研究 [J], 张利民;张乐乐;刘颖涛
4.基于电磁三轮系统智能车的传感器排布方案与控制策略 [J], 魏磊;李兴旭;高琴;张猛;
5.基于电磁三轮系统智能车的传感器排布方案与控制策略 [J], 魏磊;李兴旭;高琴;张猛
因版权原因,仅展示原文概要,查看原文内容请购买。
电磁直立寻迹智能车的系统设计与软件开发
电磁直立寻迹智能车的系统设计与软件开发于玉亭;王恩亮【摘要】The automatic tracking of two-wheeled self-balancing electromagnetic smart car is a nonlin-ear,strong coupled,underactuated and unstable inverted pendulum system.According to the characteristics of the smart car,the hardware of the system is designed by combining the mechanical structure of the two wheeled self balancing intelligent vehicle,the main control board and the drive board,and the signal detected by the atti-tude sensor is processed by complementary filtering and Kalman filtering to control the upright balance of the in-telligent vehicle.Finally,the path information obtained by the path detection sensoris fused with the upright balance control signal through normalization processing,and the intelligent vehicle direction control is realized on the basis of upright balance.Experiments show that the smart car runs smoothly,steers flexibly and fast.%自动循迹的两轮自平衡电磁智能车是一个非线性、强耦合、欠驱动的自不稳定一级倒立摆系统.针对该智能车特点,采用两轮自平衡智能车机械架构、主控板、驱动板等模块相结合设计了系统硬件;并利用互补滤波和卡尔曼滤波方式对姿态检测传感器检测到的信号进行处理、以控制智能车直立平衡;最后通过归一化处理将路径检测传感器获得的路径信息与直立平衡控制信号进行融合,在直立平衡基础上实现智能车方向的控制.实验表明,该智能车运行平稳、转向灵活、速度较快.【期刊名称】《佳木斯大学学报(自然科学版)》【年(卷),期】2018(036)001【总页数】5页(P45-49)【关键词】智能车;信号处理;平衡控制【作者】于玉亭;王恩亮【作者单位】安徽新华学院电子通信工程学院,安徽合肥230008;安徽新华学院电子通信工程学院,安徽合肥230008【正文语种】中文【中图分类】TP242.60 引言在人工智能与传统汽车电子技术的交织下,促使了无人驾驶汽车的产生。
基于电磁引导的智能车系统设计方法
基于电磁引导的智能车系统设计方法本文介绍了一种以电磁线引导,通过电感采集的方法实现对智能车控制,使用K66芯片作为核心控制单元,以及电感电容,编码器,蓝牙,红外线测距,无线串口透传等传感器,来实现数据处理以及智能车的行驶,使用经典的均值滤波算法和PID控制算法等算法,让智能车能够平稳且快速的通过环岛、十字路口、爬坡、会车等一系列道路元素,很好的展现对自动驾驶的模拟。
标签:电磁;传感器;无线串口透传;PID控制算法;一、引言现如今,无人驾驶技术已经成为汽车行业发展的新趋势。
而无人驾驶的技术难点在于路况信息的采集、处理和措施,路况信息的采集和处理决定了智能车的应对措施。
在全国大学生智能车比赛中,智能车成功的把硬件和软件成功的及为一体,在设计硬件的同时要考虑算法在处理数据的难易程度。
它在设计过程要有合理的规划与决策,只有前期的合理的硬件才能让后面的数据处理变得容易。
它采用了电感采集、串口通信、无线通信、微处理器、红外传感器、数据处理,机械构造等技术,智能车已经成为人工智能领域的热门和发展方向。
通过比赛,可以拓展大学生的创新设计能力,让大学生对学习产生乐趣,智能车硬件和软件的学习已经成为培养计算机类大学生学习、创新的重要方法之一。
二、总体设计智能车的总体设计如图1所示包括八大模块:电路模块、电感采集、编码器、红外模块、驱动模块、无线通信模块、调试模块、稳压模块。
主控模块集成在一块电路板上,这样可以尽量采用PCB内部走线,可以避免因接线处不稳定导致电路断路或者信号不稳的情况。
电路模块为各模块提供电源以及通过电流电压的变化传递各模块之间的信息。
电感采集通过电感电容采集电磁,来引导智能车的行驶方向。
驱动模块包括舵机驱动和电机驱动模块。
无线通信模块通过DL-30无线串口透传来实现智能车与车之间的通信和指令传输。
调试模块通过蓝牙和OLED来显示智能车采集的数据,让数据变得可视化。
稳压模块保证电源持续稳定的输出电流。
《基于电磁信号的智能寻迹车设计》范文

《基于电磁信号的智能寻迹车设计》篇一一、引言随着科技的不断发展,智能寻迹车在物流、工业自动化、无人驾驶等领域的应用越来越广泛。
本文将重点介绍一种基于电磁信号的智能寻迹车设计,旨在通过电磁信号的感知与处理,实现寻迹车的精确控制与高效运行。
二、设计概述基于电磁信号的智能寻迹车设计主要包括硬件设计和软件算法设计两部分。
硬件部分主要包括传感器模块、控制模块、驱动模块等;软件部分则包括信号处理、路径识别、控制算法等。
通过软硬件的结合,实现寻迹车的自主寻迹、避障、速度控制等功能。
三、硬件设计1. 传感器模块:传感器模块是寻迹车感知环境的关键部分,主要包括电磁传感器、红外传感器、超声波传感器等。
电磁传感器用于感知地面上的电磁信号,为寻迹提供依据;红外传感器和超声波传感器则用于避障,保证寻迹车的安全运行。
2. 控制模块:控制模块是寻迹车的“大脑”,负责接收传感器信号、处理信息、发出控制指令等。
常用的控制模块有单片机、FPGA、DSP等,本设计采用高性能的单片机作为控制核心。
3. 驱动模块:驱动模块负责驱动寻迹车前进、转向、避障等动作,主要包括电机、电机驱动器、电池等。
电机驱动器采用高效率的直流无刷电机驱动器,以保证寻迹车的动力性能。
四、软件算法设计1. 信号处理:寻迹车通过传感器模块获取地面上的电磁信号,经过滤波、放大、采样等处理后,得到可用于路径识别的数据。
2. 路径识别:路径识别是寻迹车的核心算法之一,通过分析处理后的电磁信号,识别出地面上的路径信息。
本设计采用基于机器视觉和模式识别的算法,实现高精度的路径识别。
3. 控制算法:控制算法负责根据路径识别结果,发出控制指令,驱动寻迹车按照预定路径行驶。
本设计采用PID控制算法,实现精确的速度和方向控制。
五、系统实现与测试1. 系统实现:根据硬件设计和软件算法设计,将各部分组装在一起,形成完整的智能寻迹车系统。
2. 测试与优化:对系统进行测试,包括路径识别测试、速度控制测试、避障功能测试等。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于电磁传感器的智能直立车控制系统设计
摘要本文设计并实现了电磁智能车的整体框架结构和相关硬
件电路。
电磁智能车的实现使用mc9s12sx128 单片机作为核心控制芯片,并采用数字增量式pid和模糊方法作为控制算法。
关键词 mc9s12sx128 单片机舵机控制速度控制 pid
中图分类号:tp273.5 文献标识码:a
0 引言
全国大学生智能汽车竞赛是教育部倡导的大学生科技竞赛之一。
以智能汽车为研究对象的创意性科技竞赛,是面向全国大学生的一种具有探索性的工程实践活动。
本论文采用飞思卡尔半导体公司的8 位、16 位处理器(单核)作为唯一的微控制器,采用a型车模。
车模通过感应由赛道中心导线产生的交变磁场,进行路径检测。
本文则采用通电导线产生的电磁场对智能车进行引导。
使用磁场信号引导车沿一定轨迹行走的优点主要体现在磁场信号具有很好的环
境适应性,不受光线、温度、湿度等环境因素的影响。
1 智能车整体方案设计
根据电磁寻迹的设计方案,赛车整体包括以下五大模块:
mc9s12xs128单片机控制模块,路径识别模块(电磁传感器模块),电机驱动模块,电源管理模块,编码器测速。
mc9s12xs128单片机是智能车的核心,负责赛道信息的接收、滤波、处理数据和调用控制算法,最终输出电机的控制信号。
1.1 电源模块设计
电源管理模块的功能是对电池进行电压调节,为各个模块正常工作提供可靠的工作电压。
设计中除了考虑电压范围和电流容量外,还要在电源转化效率、降低噪音、防止干扰等方面进行优化。
本系统小车全部硬件电路的电源采用7.2 v、2000mah镍镉蓄电池提供。
由于电路中的不同电路模块所需要的工作电压和电流容量各不相同,因此将充电电池电压转换成3.3 v、5 v和7.2 v三个档。
1.2 路径识别模块设计
模块是系统信息输入的重要来源,相当于智能小车的“眼睛”,主要负责将小车当前或前面位置的赛道信息输出给主控芯片处理;本系统使用3个电磁传感器采集赛道信息。
1.3 驱动电路模块设计
本系统电机驱动选择英飞凌公司的bts7970b驱动芯片,由单片机的pwm模块发出不同占空比的pwm信号来控制行进电机的转速。
bts7970b 芯片通过pwm信号开启关闭通道,输出不同电压控制行进电机。
由于bts7970b是半桥芯片,驱动电路使用两片bs7970
组成一个全桥用以驱动电机。
1.4 直立传感器模块设计
通过角速度信号积分可以得到车模的角度,为了抑制角速度信号的漂移以及积分电路的漂移,需要根据加速度传感器给出z轴信号进行角速度信号矫正。
通过调节电位器p1大小可以改变角速度的比例系数。
p1越大,角速度比例值越小;p1越小角速度比例值越大。
通过调节p1使得角度输出可以更好的跟踪加速度传感器z轴
信号输出。
2 系统软件设计
模糊pid 控制器以误差e 和误差变化de 作为输入,可以满足不同时刻的e 和de 对pid 参数自整定的要求,并利用模糊控制规则对pid 参数进行修改。
它就是在pid 算法的基础上,通过计算当前系统误差e和误差变化率de,利用模糊规则进行模糊推理,查询模糊矩阵表进行参数调整。
当进入弯道或坡道实际测定速度与设定速度误差大于设定的范围,我们采用bang-bang控制算法,如果实际设定的速度小于设定速度范围,我们采用pid控制算法,这样提高了系统对赛道和环境的适应能力。
3 结语
本文以第七届全国智能车竞赛为背景,设计了基于电磁传感器引导的智能车系统,采用mc9s12xs128单片机作为核心控制芯片,经过反复设计与调试运行,取得了较好的运行效果,满足比赛的要求。
?l鼙疚挠?012年度国家级大学生创新创业训练计划项目基金支持。
参考文献
[1] 张利民,张乐乐,刘颖涛.基于电磁传感器的智能车控制算法研究[j].工业控制计算机,2012(25).
[2] 张茜,杨旭海,薛令阳.基于电磁传感器的智能车控制系统设计[j].电子元器件应用,2012(15).。