智能车电磁传感器制作方案
电磁传感器采集算法方案

河海大学常州校区报告5.2 磁场信号的提取与处理在本届的电磁组智能车中,所检测的信号是电磁信号,为连续的模拟量,及在整个跑道的横向范围能都能检测到信号的存在,唯一的差异就是信号的强弱。
这样我们可以有两种处理方法:Ⅰ:设定一个阀值,将在导线左右一定小的范围内的信号处理为检测到导线,将其他的情况设定为没有检测到导线。
这样的处理方法就是将电磁信号处理成和光电一样的数字信号进行处理。
图5.4 信号处理效果图Ⅱ:将整个跑道中检测到的信号作为模拟量进行处理,这样检测到的信号离导线越近强度越大,在跑道的边缘则信号越弱。
对于传感器的控制我们采取的是第二种方法。
第一排的传感器主要工作是检测当前导线的位置。
我们在第一排上放了 3 个传感器来检测信号,然后根据各自的位置和检测到的信号对得到的值进行加权平均,这样就得到了当前黑线的位置。
这样根据得到的值可以得出当前黑线与车身之间的夹角,然后将这一数据进行处理转化成PWM 信号送给舵机杭州电子科技大学钱江一号报告速度控制子程序设计速度控制部分是智能车除了舵机控制之外最为核心的内容。
一个好的速度控制就是能十分准确的给出目标速度,电机对目标速度响应迅速,系统在干扰下速度依然稳定。
第一步要求有合理的速度决策。
我们最终采用的速度决策方法是一个简单的分段函数。
将赛道分为直道,小半径弯道,大半径弯道,丢失路线。
而且这些速度可以根据赛道的具体情况通过按键在比赛准备时设定。
速度给定了之后执行也大有学问。
直接列出速度和占空比的关系是一种十分不稳定的做法。
这种做法受电池电量影响严重,而且只能适应某一种摩擦力的赛道。
所以我们决定根据编码器反馈回来的数值进行换算。
当编码器反馈回来的速度没有达到目标速度,那么正转占空比自加,反之则自减。
只要调节自加和自减的步进就能很好的对速度进行控制。
舵机打角子程序设计关于舵机打角是建立在赛道分析的基础上的。
上面得到的L和λ在接下来的控制中起到到关键的作用。
我们分析了一下数据然后给出了一个经验公式:PWMDTY_PRE=m*L+n*λ。
电磁感应智能电动车设计报告

电磁感应智能电动车设计报告姓名:张峰 学号:2008111116 专业:电子信息工程 学院:电气与新能源学院摘要:为了实现小汽车智能控制,以ATmega16为核心,MCU 将各种传感器得到的信息进行综合判别和处理,然后发出指令给电机驱动器,控制小汽车,使小汽车能够快速、准确的实现左转、右转、调速、前进、后退和停车。
设计使用了线圈磁场传感器进行路径检测,测量车辆的位置,矫正行车路线。
用干簧管检测起始线处的永磁铁使小车能精确的在其附近停车。
用PWM 调速法准确的实现左转、右转、调速、前进和后退。
多传感器并行工作,MCU 的综合数据处理为小车按照预定程序运行提供了充分的保证。
关键字:ATmega16;线圈磁场传感器;干簧管;PWM 调速法1 小车系统整体设计电磁感应智能电动车采用ATMEL 公司的高性能、低功耗的 8 位AVR 微处理器作为主控制芯片。
利用一个线圈磁场传感器检测路径,实现行车位置的判断,进而控制电机。
系统分为控制部分以及信号检测部分。
其中小车控制部分包括电机驱动模块;信号检测部分包括路径检测和起始线处永久磁铁检测。
系统方案方框图如图1所示。
图1 智能小车寻迹系统框图2 系统各模块的原理与实现2.1主控芯片的选型ATmega16系列单片机是美国ATMEL 公司生产的高性能、低功耗的8 位AVR 单片机。
它具有先进的RISC结构,16K 字节的系统内可编程Flash 擦写寿命: 10,000 次;512字节的EEPROM 擦写寿命: 100,000次;四通道PWM ;8路10 位ADC ;工作电压::4.5 - 5.5V ;32 个可编程的I/O 口;有40引脚PDIP 封装,44 引脚TQFP 封装, 与44 引脚MLF封装。
片上资源丰富,以提供“单片”解决方案。
本系统选用一片40引脚PDIP 封装的ATmega16作为MCU ,与电机驱动芯片L298N 一起控制电机。
还处理线圈磁场传感器送来的路径检测信号,该信号主要控制小车的加速、减速、惯性行驶、刹车、转向等状态。
电磁导航式智能车传感器模块的设计与实现

2系统 描 述 .
:
/ 工
I l I
。
撕蹴
铽
.
பைடு நூலகம்
女 雠
起
跑 £ 爱
长 皮
'
盘霸 量 邕£
@
一 一 ~ 、
、
、
一 ,
,
、
、 一 ,
.
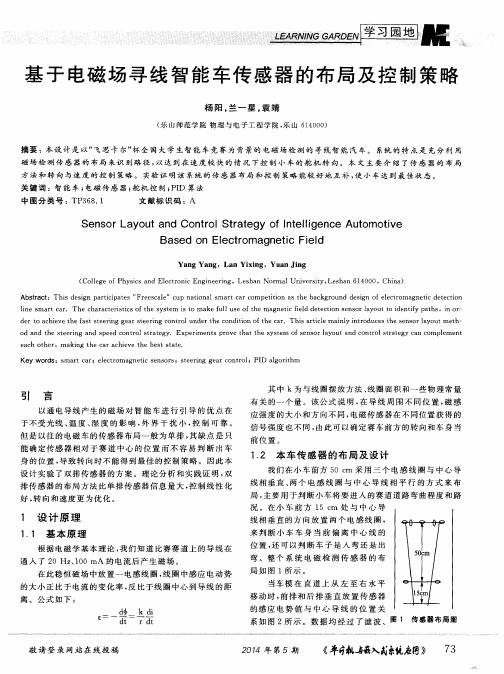
图l 道路环境示意 图 给定道路如图 1 所示 , 宽度 为 5 e 中间铺设一条引导线 , 0 m, 导线通 有 5 — 5 m 频率为 2 K±2 0 10 A、 0 K的交变 电流 , 电流会在 周围空间产生 该 交变 电磁场 , 另外设置起止线下方左右两边各有三块磁钢 。 要求智能车 能够 跟踪地 面引导线高速运 动 , 同时识别 引导线 的变化 , 遇到弯道 、 十 字交叉等能够正确应对 , 测到起止线能及时停车 。 根据 以上要求 ,设计传感器模 块包括引导线检测和起止线 检测两 个子模块 , 分别实现导航信号跟踪 以及遇起止线 自动停车功能。 引导线 所产生 的交变 电磁场信息采用 电感 元件检测 ,从而获取智能 车在道 路 上的左右偏差 , 并及时调整 。起止线信 息采 用霍尔传感器检测 , 到信 测 号立即控制智能车停止。 3传 感器模块 电路设计 . 稳压电源是传感器模块稳定工作 的基 础 ,本设计中霍尔传感器 的
基于电磁场寻线智能车传感器的布局及控制策略
引 言
以通 电导 线 产 生 的 磁 场 对 智 能 车 进 行 引 导 的 优 点 在
于不受光线 、 温度、 湿 度 的影 响 , 外界 干 扰 小 , 控方 法 、 线 圈 面 积 和 一 些 物 理 常 量
有 关 的一 个 量 。该 公 式 说 明 , 在导 线周 围不 同位置 , 磁 感 应 强 度 的大 小 和方 向不 同 , 电 磁传 感 器在 不 同位 置 获 得 的 信号强度也不 同 , 由此 可 以 确 定赛 车 前 方 的 转 向 和 车 身 当
摘 要 :本 设 计 是 以“ 飞 思 卡 尔” 杯 全 国 大 学 生智 能 车 竞 赛 为 背 景 的 电磁 场 检 测 的 寻 线 智 能 汽 车 。 系统 的特 点 是 充分 利 用 磁 场检 测 传 感 器 的布 局 来识 别路 径 , 以 达 到 在 速 度 较 快 的 情 况 下控 制 小 车 的 舵 机 转 向 。本 文 主 要 介 绍 了传 感 器 的 布 局 方 法 和 转 向与 速 度 的控 制 策略 。 实验 证 明 该 系统 的 传 感 器布 局 和控 制 策 略 能 较 好 地 互 补 , 使 小 车达 到 最 佳 状 态 。
Ya n g Ya n g,La n Yi xi n g,Yu a n J i n g
( Co l l e g e o f P h y s i c s a n d E l e c t r o n i c En g i n e e r i n g,Le s h a n No r ma l Un i v e r s i t y , L e s h a n 6 1 4 0 0 0,Ch i n a )
e a c h ot he r ,ma k i n g t he c a r a c h i e ve t h e be s t s t at e . Ke y wo r ds:s ma r t e a r;e l e c t r om a g ne t i c s e ns o r s;s t e e r i ng ge a r c on t r o l ;PI D a l go r i t hm
飞思卡尔智能车-电磁传感器与实践
电磁传感器与实践
电磁传感器与实践
由毕奥-萨伐定律有: 0 I B 4 r
其中u为真空磁导率:
所以不难想象磁场强度 非常的弱,难以使用测 磁场的方式检测。
电磁传感器与实践
我们有很多测量磁场的方法,磁场传感器 利用了物质与磁场之间的各种物理效应:磁电效 应(电磁感应、霍尔效应、磁致电阻效应)、磁 机械效应、磁 光效应、核磁共振、超导体与电 子自旋量子力学效应。 我们选取最为传统的电磁感应线圈的方案。 它具有原理简单、价格便宜、体积小(相对小)、 频率响应快、电路实现简单等特点,适应于初学 者快速实现路经检测的方案。
电磁传感器与实践
从上面检测原理可以知道,测量磁场核心是检测线圈的感应电动 势 E 的幅 值。电磁传感器的设计主要包括:感应线圈的选择、信号 选频放大、整流与检测等几个方面,将会涉及到电磁场与波、高频、 模电等相关学科的知识点,这里不再详细的给出各个方案的具体论证 过程,直接给出电路设计系统框图:
电磁传感器与实践
电磁传感器与实践
对于实际传感器摆放位置的说明: 1、水平方向两个平行的线圈
2、水平方向两个内八字的线圈
电磁传感器与实践
3、水平方向两个垂直的线圈 4、水平和竖直方向两个线圈
电磁传感器与实践
使用色环电感制作的传感器:
电磁传感器与实践
使用多排传感器:
电磁传感器与实践
当然传感器的安装方法还有非常多的方法,要靠我们自 己去探索实验,在寻找时,也是一种乐趣,当找的更好 的方法时,你会感到一种满足 感! 由于本人的水平有限,PPT中可能有不少漏洞,有不全 面的地方,详细内容可以参照《智能小车设计指导》第 二版,本人已上传到QQ群的共享文件中。
h h Ed E1 E2 2 2 2 h 为两传感器之间的距离 x为其中一个传感器到中间导线的距离
《基于电磁信号的智能寻迹车设计》范文

《基于电磁信号的智能寻迹车设计》篇一一、引言随着科技的不断发展,智能寻迹车在物流、工业自动化、无人驾驶等领域的应用越来越广泛。
本文将重点介绍一种基于电磁信号的智能寻迹车设计,旨在通过电磁信号的感知与处理,实现寻迹车的精确控制与高效运行。
二、设计概述基于电磁信号的智能寻迹车设计主要包括硬件设计和软件算法设计两部分。
硬件部分主要包括传感器模块、控制模块、驱动模块等;软件部分则包括信号处理、路径识别、控制算法等。
通过软硬件的结合,实现寻迹车的自主寻迹、避障、速度控制等功能。
三、硬件设计1. 传感器模块:传感器模块是寻迹车感知环境的关键部分,主要包括电磁传感器、红外传感器、超声波传感器等。
电磁传感器用于感知地面上的电磁信号,为寻迹提供依据;红外传感器和超声波传感器则用于避障,保证寻迹车的安全运行。
2. 控制模块:控制模块是寻迹车的“大脑”,负责接收传感器信号、处理信息、发出控制指令等。
常用的控制模块有单片机、FPGA、DSP等,本设计采用高性能的单片机作为控制核心。
3. 驱动模块:驱动模块负责驱动寻迹车前进、转向、避障等动作,主要包括电机、电机驱动器、电池等。
电机驱动器采用高效率的直流无刷电机驱动器,以保证寻迹车的动力性能。
四、软件算法设计1. 信号处理:寻迹车通过传感器模块获取地面上的电磁信号,经过滤波、放大、采样等处理后,得到可用于路径识别的数据。
2. 路径识别:路径识别是寻迹车的核心算法之一,通过分析处理后的电磁信号,识别出地面上的路径信息。
本设计采用基于机器视觉和模式识别的算法,实现高精度的路径识别。
3. 控制算法:控制算法负责根据路径识别结果,发出控制指令,驱动寻迹车按照预定路径行驶。
本设计采用PID控制算法,实现精确的速度和方向控制。
五、系统实现与测试1. 系统实现:根据硬件设计和软件算法设计,将各部分组装在一起,形成完整的智能寻迹车系统。
2. 测试与优化:对系统进行测试,包括路径识别测试、速度控制测试、避障功能测试等。
基于电磁传感器的智能车电感值处理方案
基于电磁传感器的智能车电感值处理方案随着智能车技术的不断发展,电磁传感器在车辆行驶中的应用越来越广泛。
电磁传感器能够测量车辆周围的电磁场强度,从而实现对车辆运动状态的监测和判断。
其中,电感值作为电磁传感器的一个重要参数,对车辆的行驶安全和性能起着至关重要的作用。
基于电磁传感器的智能车电感值处理方案,需要实现对电磁传感器采集的数据进行有效的处理和分析,以实现对车辆行驶状态的判断和控制。
具体方案包括以下几个方面:
1. 电磁传感器数据采集:通过安装在车辆底部的电磁传感器,实时采集车辆周围的电磁场强度信息,并将数据传输到车载处理器进行处理。
2. 数据处理与分析:对采集到的电磁场强度数据进行滤波、降噪处理,并通过算法分析得出车辆周围的电感值。
同时,结合车辆运动状态的信息,对电感值进行实时判断和控制。
3. 车辆控制与安全保障:通过对电感值的实时判断和控制,实现对车辆的加速、减速、转弯等操作的智能控制。
同时,基于电磁传感器的数据分析,可以实现对车辆周围环境的检测和预警,提高车辆行驶的安全性和稳定性。
总之,基于电磁传感器的智能车电感值处理方案,可以实现对车辆行驶状态的实时监测和控制,提高车辆的行驶安全性和性能表现,具有广阔的应用前景。
- 1 -。
电磁智能小车设计报告
标题:电磁感应智能电动车摘要:本系统以AVR单片机MEGAl6为核心器件,实现对驱动电路的控制,使电动小车自动行驶。
利用电磁原理,在车模前上方水平方向固定两个相距为L的电感,通过比较两个电感中产生的感应电动势大小即可判断小车相对于导线的位置,进而做出调整,引导小车大致循线行驶。
用PWM技术控制小车的直流电动机转动,完成小车位置、速度、时间等的控制。
利用干簧管来检测跑道的起始和终点位置从而完成小车的起步及停车。
系统总体设计:基于电磁感应的智能寻迹车模系统以AVR单片机MEGAl6(该芯片能够不需要外围晶振和复位电路而独立工作,非常适合智能寻迹车模的要求。
)为核心,由单片机模块、路径识别模块、直流电机驱动模块、舵机驱动模块等组成,如下图所示。
直流电动机为车辆的驱动装置,转向电动机用于控制车辆行驶方向。
智能寻迹车模利用电磁感应在跑道上自主寻迹前进,转向。
单片机模块(控制模块):寻迹车模采用AVR内核的ATMEGAl6。
该芯片能够不需要外围晶振和复位电路而独立工作,非常适合智能寻迹车模的要求。
路径识别模块:本方案就是在车模前上方水平方向固定两个相距为L的电感。
左边的线圈的坐标为(x,h,z),右边的线圈的位置(x-L,h,z)。
由于磁场分布是以z轴为中心的同心圆,所以在计算磁场强度的时候我们仅仅考虑坐标(x,y)。
由于线圈的轴线是水平的,所以感应电动势反映了磁场的水平分量。
计算感应电动势:图 1 线圈中感应电动势与它距导线水平位置x 的函数如果只使用一个线圈,感应电动势E 是位置x 的偶函数,只能够反映到水平位置的绝对值x 的大小,无法分辨左右。
为此,我们可以使用相距长度为L 的两个感应线圈,计算两个线圈感应电动势的差值:对于直导线,当装有小车的中轴线对称的两个线圈的小车沿其直线行驶,即两个线圈的位置关于导线对称时,则两个线圈中感应出来的电动势大小应相同、且方向亦相同。
若小车偏离直导线,即两个线圈关于导线不对称时,则通过两个线圈的磁通量是不一样的。
智能车电磁 方案
智能车电磁方案1. 引言智能车是利用现代科技的成果,将各种传感器、电子元器件和控制算法结合在一起,实现自主行驶和智能化导航的车辆。
其中,电磁传感器是智能车中不可或缺的部分,它能够帮助智能车感知周围环境,从而做出合适的决策。
本文将介绍智能车中常见的电磁传感器方案。
2. 电磁传感器的作用在智能车中,电磁传感器用于探测周围环境的磁场强度变化,以识别障碍物或者导航。
通过分析电磁传感器输出的信号,智能车可以获取周围环境的信息,如障碍物的距离和方向等。
基于这些信息,智能车可以做出合适的决策,比如避开障碍物或者沿着预定的路径导航。
3. 电磁传感器方案智能车中常见的电磁传感器方案有以下几种:3.1 磁敏电阻传感器(Magnetic Resistive Sensor)磁敏电阻传感器是一种基于磁敏效应的传感器,它的工作原理是通过测量磁场对电阻值的影响来感知周围环境的磁场强度变化。
由于其结构简单、成本低廉,磁敏电阻传感器被广泛应用于智能车中。
3.2 磁感应传感器(Magnetic Inductive Sensor)磁感应传感器是一种基于磁感应原理的传感器,它利用线圈产生磁场,并测量磁场强度的变化来感知周围环境的磁场强度变化。
磁感应传感器具有高灵敏度和较长的探测距离,适合用于智能车的环境感知。
3.3 Hall效应传感器(Hall Effect Sensor)Hall效应传感器是一种基于Hall效应原理的传感器,它利用电场和磁场之间相互作用的效应来感知周围环境的磁场强度变化。
由于Hall效应传感器响应速度快、精度高,并且可以提供数字输出信号,所以在智能车中得到广泛应用。
3.4 磁编码器(Magnetic Encoder)磁编码器是一种利用磁场变化来测量位置或速度的装置,它通常由磁性材料和传感器组成。
在智能车中,磁编码器可以使用在电机和轮子等部件上,用于测量车辆的位置和速度。
4. 总结智能车中的电磁传感器方案有磁敏电阻传感器、磁感应传感器、Hall效应传感器和磁编码器等。
基于电磁传感器识别路径的智能车设计
文档从互联网中收集,已重新修正排版,word格式支持编辑,如有帮助欢迎下载支持。
摘要本文以第七届“飞思卡尔”杯全国大学生智能汽车竞赛为背景,对两轮直立行走智能小车硬件和软件进行了深入的分析与设计,以参与制作的智能小车为例介绍智能小车设计制作的全过程。
该智能车系统所用车模型号为N-286。
采用16位单片机MC9S12XS128作为主控制单元,设计、制作一辆能够自动识别路径并能两轮自平衡直立行走的智能小车。
整个智能车系统主要包括三大方面:机械结构安装,硬件电路设计,软件算法设计。
本系统在设计中采用模块化设计,其中,路径检测模块采用LC谐振回路作为选频网络,然后对其信号进行放大、滤波;角度检测模块利用陀螺仪和加速度传感器分别测量车模的角速度、角度,然后将角速度积分信号与角度信号整合得到车模的精确角度信号;电机驱动模块采用四片BTS7960驱动芯片,两两级联构成全桥驱动电路,利用PWM进行速度控制;速度检测模块采用增量式光电编码器;电源模块通过稳压芯片提供3.3V、5V电压。
系统应用PID控制算法,构成一个闭环控制系统。
通过对赛道信息、角度信号和速度信号的综合分析,利用N-286型车模双后轮驱动的特点,实现小车两轮自平衡直立行走。
关键字:直立行走;PID;MC9S12XS128;电机控制AbstractOn the background of the Seventh Freescale Cup Intelligent Auto-mobile Competition for national college students, this paper conducts deep analysis and design on the hardware and software of the two walking upright intelligent automobiles, and briefly introduces the whole processes of designing and making the automobile through the example of making the intelligent automobile.This intelligent auto-mobile system adopts the model N-286 as its type. By taking the 16 bits single chip microcontroller MC9S12XS128 as its main control unit, we can design and make an intelligent auto-mobile, which can recognize certain road automatically and run upright with its two wheels. The entire system contains three main parts: the installation of mechanical structure, the design of hardware circuit and the design of the software algorithm. The system adopts the modular design. Among them, the path detection module uses LC resonance loop as the frequency selective network, and then has its signal amplified and filtered. The angle detection module uses the gyroscope and angle acceleration sensor to measure the angular velocity and angle of models respectively. Then it integrates angle speed signal and angle signal to get precise angle signal of the models. Motor driver module uses four pieces of BTS7960 drive chips and two cascades to construct the whole bridge driving circuit. The system adopts PWM speed control algorithm to form a close loop control system. Speed detection module uses the solid-axes photoelectric encoder. Power module supplies voltage of 3.3V and 5V through regulated chips. The system applies the PID control algorithm to form a closed loop control system. Through a comprehensive analysis of track information, angle signal and speed signal and by using the characteristics of dual rear-wheel drive of N-286 auto-mobile models, it realizes the self-balanced upright walking with its two wheels. Key Words:Walk upright, PID, MC9S12XS128, Motor control目录摘要..................................................................................................... 错误!未定义书签。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
图 2 直线电流的磁场
∫ B = θ2 μ0I sinθ dθ
θ1 4π r
(μ0 = 4π ×10−7TmA−1)
(1)
由此得:
B
=
μ0 I 4π r
( cos θ1
−
cosθ2
电磁组竞赛车模 路径检测设计参考方案
(竞赛秘书处 2010-1,版本 1.0)
一、 前言 第五届全国大学生智能汽车竞赛新增加了电磁组比赛。竞赛车模需要能够通
过自动识别赛道中心线位置处由通有 100mA 交变电流的导线所产生的电磁场进 行路径检测。除此之外在赛道的起跑线处还有永磁铁标志起跑线的位置。具体要 求请参阅《第五届智能汽车竞赛细则》技术文档。
x
∈ (−15,
+15)cm
,计算感应电动势
E
=
h2
h +
x2
随着线圈水平位
置 x 的变化取值,如下图所示:
感应电动势
0.22
0.2
0.18
0.16
0.14
E/V
0.12
0.1
0.08
0.06
0.04
0.02
-15
-10
-5
0
5
10
15
x/cm
图 7 线圈中感应电动势与它距导线水平位置 x 的函数
如果只使用一个线圈,感应电动势 E 是位置 x 的偶函数,只能够反映到水平 位置的绝对值 x 的大小,无法分辨左右。为此,我们可以使用相距长度为 L 的两
可以使用 LC 串并联电路来实现选频电路(带通电路),如下图所示:
电路示意图
L
C Vo
谐振 电容
感应 线圈
电感 内阻
等效电路图
R0/10Ω
Vo
L/10mH E
C/6.8nf
感应电动势
图 11:RLC 并联谐振电路
上述电路中,E 是感应线圈中的感应电动势,L 是感应线圈的电感量,R0 是
电感的内阻,C
感知地球磁场的方向,从而发明了指南针。但是对于磁场定量精确的测量以及更 多测量方法的发现还是在二十世纪初期才得到了突飞猛进的进展。
现在我们有很多测量磁场的方法,磁场传感器利用了物质与磁场之间的各种 物理效应:磁电效应(电磁感应、霍尔效应、磁致电阻效应)、磁机械效应、磁 光效应、核磁共振、超导体与电子自旋量子力学效应。下面列出了一些测量原理 以及相应的传感器:
为了验证 RLC 选频电路的效果,我们对比了在有和没有谐振电容两种情况 下的电感输出的感应电压。在导线中通有 20kHz 左右,100mA 左右方波电流, 在距离导线 50mm 的上方放置垂直于导线的 10mH 电感,使用示波器测量输出电 压波形。如下图 12 所示。
电流参考波形
电感10mH感 应 电 压 距离h=5cm 电感L=10mH
从上面结果可以看出,增加有谐振电容之后,感应线圈两端输出感应 20KHz 电压信号不仅幅度增加了,而且其它干扰信号也非常小。这样无论导线中的电流 波形是否为正弦波,由于本身增加了谐振电容,所以除了基波信号之外的高次谐 波均被滤波除掉,只有基波 20kHz 信号能够发生谐振,输出总是 20KHz 正弦波。
(1) 电磁感应磁场测量方法:电磁线磁场传感器,磁通门磁场传感器,磁 阻抗磁场传感器。
(2) 霍尔效应磁场测量方法:半导体霍尔传感器、磁敏二极管,磁敏三极 管。
(3) 各向异性电阻效应(AMR)磁场测量方法。 (4) 载流子自旋相互作用磁场测量方法:自旋阀巨磁效应磁敏电阻、自旋
阀三极管磁场传感器、隧道磁致电阻效应磁敏电阻。 (5) 超导量子干涉(SQUID)磁场测量方法:SQUID 薄膜磁敏元件。 (6) 光泵磁场测量方法:光泵磁场传感器。 (7) 质子磁进动磁场测量方法。 (8) 光导纤维磁场测量方法。 以上各种磁场测量方法所依据的原理各不相同,测量的磁场精度和范围相差 也很大,10-11-107G。我们需要选择适合车模竞赛的检测方法,除了检测磁场的 精度之外,还需要对于检测磁场的传感器的频率响应、尺寸、价格、功耗以及实 现的难易程度进行考虑。
个感应线圈,计算两个线圈感应电动势的差值:
Ed
=
E1
− E2
=
h2
h +
x2
−
h2
h + (x − L)2
下面假设 L = 30cm ,计算两个线圈电动势差值 Ed 如下图所示:
Ed/ V
0.2
0.15
0.1
0.05
0
-0.05
-0.1
-0.15
-0.2
-5
0
5
10
15
20
25
30
35
x/cm
图 8 感应电动势差值 Ed 与距离 x 之间的函数
1-100
长波通讯
> 30kHz
10-6-10-3
赛道中心导线周围 0.5 米范围 20kHz
10-4-10-2
比赛选择 20kHz 的交变磁场作为路径导航信号,在频谱上可以有效地避开 周围其它磁场的干扰,因此信号放大需要进行选频放大,使得 20kHz 的信号能 够有效的放大,并且去除其它干扰信号的影响。
放大,放大倍数一般要大于 100 倍(40db)。 (2) 噪声多:一般环境下,周围存在着不同来源、不同变化频率的磁场。
如下表所示:
表 1:典型的环境磁场强度范围
磁场环境
磁场性质
磁场强度(高斯)
家用电器周围一米范围
50Hz
10-3-10-2
地表面地球磁场
恒定
0.2-0.5
工业电机和电缆周围十米范围 50Hz
从上图可以看出,当左边线圈的位置 x = 15cm 的时候,此时两个线圈的中 心恰好处于跑道中央,感应电动势差值 Ed 为0。当线圈往左偏移, x ∈ (15,30) , 感应电动势差值小于零;反之,当线圈往右偏移, x ∈ (0,15) ,感应电动势大于 零。因此在位移 0 ∼ 30cm 之间,电动势差值 Ed 与位移 x 是一个单调函数。可以 使用这个量对于小车转向进行负反馈控制,从而保证两个线圈的中心位置跟踪赛
为了能够更加准确测量感应电容式的电压,还需要将上述感应电压进一步放 大,一般情况下将电压峰峰值放大到 1-5V 左右,就可以进行幅度检测,所以需 要放大电路具有 100 倍左右的电压增益(40db)。最简单的设计可以只是用一阶 共射三极管放大电路就可以满足要求,如下图所示:
+5V
20kHz 频率
R1 510k
(2)
即线圈中感应电动势的大小正比于电流的变化率,反比于线圈中心到导线的
距离。其中常量 K 为与线圈摆放方法、线圈面积和一些物理常量有关的一个量,
具体的感应电动势常量须实际测定来确定。
3、双水平线圈检测方案 不同的线圈轴线摆放方向,可以感应不同的磁场分量。我们先讨论一种最简
单的线圈设置方案:双水平线圈检测方案。在车模前上方水平方向固定两个相距 L 的线圈,两个线圈的轴线为水平,高度为 h ,如下图所示:
图 1:电流周围的电磁场示意图
导线周围的电场和磁场,按照一定规律分布。通过检测相应的电磁场的强度 和方向可以反过来获得距离导线的空间位置,这正是我们进行电磁导航的目的。
由于赛道导航电线和小车尺寸 l 远远小于电磁波的波长 λ ,电磁场辐射能量 很小(如果天线的长度 l 远小于电磁波长,在施加交变电压后,电磁波辐射功率 正比于天线长度的四次方),所以能够感应到电磁波的能量非常小。为此,我们 将导线周围变化的磁场近似缓变的磁场,按照检测静态磁场的方法获取导线周围 的磁场分布,从而进行位置检测。
L1
C1
10mH 6.8nF
C2/104
R2 5.1k
C3/104
放大输出
T1
Vout
1815 D1
β>150
图 13:单管共射交流放大电路
图 4:导线周围的感应电磁场
导线中的电流按一定规律变化时,导线周围的磁场也将发生变化,则线圈中 将感应出一定的电动势。根据法拉第定律,线圈磁场传感器的内部感应电压 E 与
磁场 B(t) 、电磁线圈的圈数 N 、截面积 A 的关系有:
E
=
( NA)
×
(μ0μr
)
dB(t) dt
=
−
d Φ (t ) dt
是并联谐振电容。上述电路谐振频率为:
f0
=
2π
1 LC
。已知感
应电动势的频率 f0 = 20kHz ,感应线圈电感为 L = 10mH ,可以计算出谐振电容
的容量为:
( ) C
=
( 2π
1
)f0 2
L
=
2π
1 × 20 ×103
3 ×10 ×10−3
=
6.33 ×10−9
(F)
通常在市场上可以购买到的标称电容与上述容值最为接近的电容为 6.8nF, 所以在实际电路中我们选用 6.8nF 的电容作为谐振电容。
10mH 的电感。如下图所示。
图 9 几种 10mH 电感 这类电感体积小,Q 值高,具有开放的磁芯,可以感应周围交变的磁场。如 下图所示:
磁场 线圈
磁场
引脚
磁材料
图 10 工字磁材电感
2、信号选频放大 使用电感线圈可以对其周围的交变磁场感应出响应感应电动势。这个感
应电动势信号具有以下特点: (1) 信号弱:感应电压只有几十个毫伏。在检测幅值之前必须进行有效的
在下面所介绍的检测方法中,我们选取最为传统的电磁感应线圈的方案。它 具有原理简单、价格便宜、体积小(相对小)、频率响应快、电路实现简单等特 点,适应于初学者快速实现路经检测的方案。