MIT开放课程Mobile Autonomous Systems Laboratory-第2讲mechanical
基于手势交互的机械臂轨迹示教系统

软件工程 SOFTWARE ENGINEERING 第24卷第8期2021年8月V ol.24 No.8Aug. 2021文章编号:2096-1472(2021)-08-55-04DOI:10.19644/ki.issn2096-1472.2021.08.013基于手势交互的机械臂轨迹示教系统花傲阳(上海理工大学机械工程学院,上海 200082)*****************摘 要:为了解决传统机械臂示教方式上手难度高、效率低、人机交互系统不友好的问题,结合机器视觉与神经网络,提出一种基于手势交互的机械臂轨迹示教系统。
该系统通过机器视觉定位指尖位置,记录下指尖的运动轨迹并将其用于机械臂的轨迹示教;通过卷积神经网络识别静态手势,用于与机械臂进行如抓取、放置、开始示教等动作的人机交互。
系统通过ROS(机器人操作系统)与机械臂通信,驱动机械臂完成示教轨迹的复现。
通过设计实验对系统的性能进行评估,结果显示本示教系统具有编程难度低、易用性好、项目部署周期短的优点,可用于复杂轨迹的示教工作,极大地提升了机械臂示教工作的效率。
关键词:机械臂;轨迹示教;机器视觉;神经网络;人机交互中图分类号:TP391.4 文献标识码:AManipulator Trajectory Teaching System based on Gesture InteractionHUA Aoyang(College of Mechanical Engineering , University of Shanghai for Science and Technology , Shanghai 200082, China )*****************Abstract: Aiming at the problems of difficulty to learn, low efficiency and unfriendly human-computer interaction system in traditional manipulator teaching methods, this paper proposes to establish a gesture interaction-based manipulator trajectory teaching system combining machine vision and neural network. Fingertip position is located through machine vision, and the movement trajectory of the fingertip is recorded and used for teaching manipulator trajectory. Convolutional neural network is used to identify static gestures, which are used for Human-computer interaction with the manipulator's actions, such as grasping, placing, and teaching. The system communicates with the manipulator through ROS (Robot Operating System), and drives the manipulator to complete the reproduction of the teaching trajectory. The performance of the system is evaluated through experiment designing. Results show that this teaching system has the advantages of low programming difficulty, user-friendliness, and short project deployment cycle. It can be used for teaching complex trajectories, which greatly improves teaching efficiency of the manipulator.Keywords: manipulator; trajectory teaching; machine vision; neural network; human-computer interaction1 引言(Introduction)近年来,我国制造业发展经历了从制造大国向制造强国的转型升级。
全球50名校开放课程网址大全
世界50所知名大学提供开放课程: (Top 50 University Open Courseware Collections)学术权威1. 麻省理工学院:麻省理工学院有许多人认为是在该国最广泛的开放课件的收集,也正好是著名大学中的第一。
学科覆盖范围从建筑、规划到人文、科学,此目录中有惊人的信息数量。
(/OcwWeb/web/home/home/index.htm)在很早以前就有台湾人开始做MIT的汉化课件,有兴趣的朋友可以去搜一下。
2. 卡内基梅隆大学:这个奇妙的大学有优秀的学术传统。
凭借其“开放的学习计划”的目标使每个人都有学习的机会并得到满足。
(/openlearning/forstudents/freecourses)3. 约翰霍普金斯大学彭博公共卫生学院:约翰霍普金斯大学是世界重要的学校之一。
虽然他们的课程设置仅限于健康知识,专业的知识使巨量收集成为最好的之一。
(/)4. 斯坦福大学:这个著名的大学为学生提供的课程,可通过iTunes供选择。
(/)5. 圣母大学:被许多人认为如果不是世界最好也是在该国最好的学校之一。
随着如历史,英语和数学等科目开放课件的产品,任何人都可以受益于这种知识的美妙学校。
(/courselist)6. 杜克大学法律中心的公共领域:杜克大学之一,是在南方最好的学校。
如果你对法律感兴趣,杜克大学学科领域的开放式课件可以大大有助于您了解司法系统漫长的道路。
(/cspd/lectures)常春藤联盟7. 哈佛医学院:虽然它的课程是限制在医学界,但他们是为在常春藤寻找信息的人很好的资源。
哈佛大学提供的课程主题,生物医疗和商业主题不等。
(/public/)8. 普林斯顿大学的通道:这所常春藤盟校有一整套客座讲座。
翻译不了了:Yale University —This wonderful Ivy League institution has a great number of ivy quality open course classes available for all.(/main/index.php)9. 耶鲁大学:这所美妙的常春藤盟校中的常春藤有一大批高质量的开放课程班所有可用。
MIT航空航天系【研究生课程】1...

Fundamentals of Systems EngineeringAs taught in: Fall 2009The International Space Station, an example of a complex system. (Image by NASA, courtesy of .)Instructors:Prof. Olivier de WeckMIT Course Number:16.842Level:GraduatCourse DescriptionThis course introduces the principles and methods of Systems Engineering. Lectures follow the "V"-model of Systems Engineering, including needs identification, requirements formulation, concept generation and selection, trade studies, preliminary and detailed design, component and subsystem test and integration as well as functional testing and delivery and operations. Additional concepts such as tradeoffs between performance, cost and system operability will be discussed. Systems Engineering standards and selected journal articles serve as a basis for readings, and individual homework assignments will apply the concepts from class. Both aeronautical and astronautical applications are covered. The class serves as preparation for the systems field exam in the Department of Aeronautics and Astronautics. Lecture NotesSES # TOPICS FILES1 Systems engineering overview (PDF - 1.1MB)2 Stakeholder analysis (PDF 1)(PDF 2) (Courtesy of Wen Feng. Used with permission.)3 Requirements definition (PDF)4 System architecture and concept (PDF)SES #TOPICS FILESgeneration5Tradespace exploration and concept selection(PDF 1) (PDF 2)6Design definition andmultidisciplinary optimization(PDF ) (Courtesy of Major Jeremy Agte. Used with permission.)7 Human factors (PDF )8Systems integration and interface management(PDF )9 Verification and validation (PDF )10 System safety(PDF ) (Courtesy of Prof. Nancy Leveson. Used with permission.)11 Commissioning and operations (PDF )12 Lifecycle management (PDF )ProjectsPapersEach week, a group of 1-3 students presented a paper that was part of that week's readings. The presentations summarized and evaluated the paper's findings. The presentation slides are courtesy of the students listed and are used with permission.SES # AUTHORS TOPICS PAPERSSLIDES2Student 1 and Student 2 Using stakeholdervalue analysis to buildexplorationsustainabilityRebentisch, Eric, Edward Crawley, Geilson Loureiro,John Dickmann, and Sandro Catanzaro. "UsingStakeholder Value Analysis to Build ExplorationSustainability." 1st Space Exploration Conference: Continuing the Voyage of Discovery,AIAA-2005-2553, Orlando, Florida, January 30-31,2005.(PDF )David SegreraThe house of qualityHauser , John R., and Don Clausing. "The House ofQuality ." Harvard Business Review 66, no.3(May-June 1988): 63-73.(PDF )3Student 3 and Student 4Isoperformance: analysis and design of de Weck, Olivier L., and Marshall B. Jones."Isoperformance: Analysis and Design of Complex(PDF )SES # AUTHORS TOPICS PAPERS SLIDEScomplex systems with desired outcomes Systems with Desired Outcomes." Systems Engineering 9, no. 1 (Spring 2006): 45-61.4 Student 5,Student 6, andStudent 7The influence ofarchitecture inengineering systemsCrawley, Edward, Olivier de Weck, Steven Eppinger,Christopher Magee, Joel Moses, Warren Seering, JoelSchindall, David Wallace, and Daniel Whitney. "TheInfluence of Architecture in Engineering Systems."Monograph, 1st Engineering Systems Symposium,Cambridge, Massachusetts, March 29-31, 2004. (PDF)(PDF)5 John A. Richmond,Greg O'Neill, andJorge CañizalesMulti-attributetradespace explorationas front end foreffective space designRoss, Adam M., Daniel Hastings, Joyce Warmkessel,Nathan Diller, "Multi-Attribute Tradespace Explorationas Front End for Effective Space System." Journal ofSpacecraft and Rockets 41, no. 1 (January-February2004): 20-28.(PDF)6 AlessandroAliakbargolkar,Rhea Liem, andBrian YutkoBenchmarkingmultidisciplinarydesign optimizationalgorithmsTedford, Nathan, and Joaquim Martins."Benchmarking Multidisciplinary Design OptimizationAlgorithms."Optimization and Engineering 11, no. 1(February 2010): 159-183.(PDF)7 Benjamin Corbin,Fabrice Kunzi, andHoward YuePredicting controllercapacity in supervisorycontrol of multipleUAVsCummings, Mary L., and Paul J. Mitchell. "PredictingController Capacity in Supervisory Control of MultipleUAVs." IEEE Transactions on Systems, Man, andCybernetics, Part A: Systems and Humans 38, no. 2(March 2008): 451-460.(PDF)8 Student 8 and JonGibbsModeling and analysisof integrationprocesses forengineering systemsTahan, Meir, and Joseph Z. Ben-Asher. "Modeling andAnalysis of Integration Processes for EngineeringSystems." Systems Engineering8, no. 1 (2005):62-77.(PDF)9 Sreeja Nag andStudent 9Mission to MarsMacCormack, Alan. "Mission to Mars (A)." HarvardBusiness School Case. Boston, MA: Harvard BusinessSchool Publishing. Case: 9-603-083, January 15,2004.(PDF)10 Student 10,Takuto Ishimatsu,and Student 11A new accident modelfor engineering safersystemsLeveson, Nancy, "A New Accident Model forEngineering Safer Systems." Safety Science 42, no.4 (April 2004): 237-270.(PDF)11 Student 12 andSydney DoOrion systemsengineering: lessonslearnedShishko, Robert. "Developing Analogy Cost Estimatesfor Space Missions." Space 2004 Conference andExhibit, AIAA-2004-6012, San Diego, California,(PDF)SES # AUTHORS TOPICS PAPERS SLIDESSeptember 28-30, 2004.Design CompetitionThe student teams were given a LEGO® kit and one hour to design and build a device to accomplish a task. The rules are given here: (PDF)AssignmentsFor assignments 2, 3, and 4, you can pick whether you want to do the aeronautics or the astronautics question; no need to do both. Solutions to Assignment 3 are unavailable.ASSN # TOPICS FILES SOLUTIONS1 Systems engineering overview, stakeholders,and requirements(PDF) (PDF)2 Design requirements, isoperformance, and tradestudies(PDF) (PDF)3 System interfaces and emergent behaviors (PDF)4 Characterizing operations (PDF) (PDF)ExamsThe mid-term quiz was 90 minutes long. The end-of-term quiz was 2 hours long. Both exams are open notes and open book. Although the online forms are unavailable, solutions are given below.QUIZZES FILESMid-term quiz Solutions (PDF)End-of-term quiz Solutions (PDF)CER_cost.xls (XLS)NPV_final_exam.xls (XLS)。
机器人学导论 chapter2

DONG QiuhuangCollege of Mechanical and Electronic Engineering, FAFU.Mathematical BasisManipulator-Mechanism Design 2Mathematical basisIntroduction4and tools will be some sort of mechanism.How to define the manipulate mathematical quantities (数学量)that represent location of the body?IntroductionRigid Body Motion (刚体运动)Position andOrientation Mathematical Quantities (Coordinates)Velocities, Forces (速度和力)must define coordinate systems representation.Mathematical basisDescription (描述)83×1 position vector.DescriptionCatesian coordinate system (笛卡尔坐标系):9Description10Description of Orientations (姿态描述)position , but also need to describe its orientation in the space.DescriptionHow to describe the orientation of a body ?Description of Orientationsreference system.Description12Description of OrientationsDescription1314Description of OrientationsDescriptionDescription of OrientationsDescriptionObtain the projection of that vector onto the unit directions of its reference coordinate.Example:Compute the Rotation MatrixRotation about axisExample:Rotation about axis:Rotation about axis:Description of OrientationsDescription19Description20manipulator hand is a position DescriptionWe define such a entity which contain the pair of position and Mathematical basiscoordinate system .工具坐标系目标坐标系固定坐标系基座坐标系Mapping23Mathematics of changing descriptions of the same quantity from frame to frame.1. Translation(平移)已知S 点在坐标系{B}中的表达,那么在坐标系{A}中如何表达?242. Rotation (旋转)求矢量在坐标系{A}三个主轴上的投影。
MMS_1-第一讲-概述

器、光笔、话筒等)
输出媒体(包括显示器、喇叭、打印机、绘图机
等)。
21
存储媒体(Storage)
存储数据的物理介质
包括硬盘、软盘、光盘、磁带和存储器等。
22
传输媒体(Transmission)
传输数据的物理媒介
传输媒体的种类很多,如电话线、双绞线、同轴
电缆、光纤、无线电和红外线等。
23
计算机与媒体
9
课程内容安排 ---
本科课程
夏老师
1. 多媒体技术概述 1. 多媒体技术概述 2. 多媒体硬件环境 2. 多媒体软硬件 3. 多媒体软件基础 3. 压缩编码 4. 压缩编码 4. 音频处理 5. 音视频获取与处理 5. 视频及图像处理 6. 超媒体与多媒体数据库 6. 音视频压缩(1) 7. 多媒体通信与网络 7. 音视频压缩(2) 8. 多媒体应用、新技术 8. 多媒体数据库 9. 多媒体网络通信 作业:photoshop, 10. VR简介;多媒体热点问题 3dmax, flash, 视频剪辑 作业:音视频编解码
17
1、多媒体技术的定义
媒体 Medium (Media)
1 ) 承载信息的实际载体,如:盘,带,纸。 2 ) 表述信息的逻辑载体,如;文字,图像,语言。
国际电信联盟电信标准化局(ITU-T) (原国际电话 与电报咨询委员会CCITT)对媒体的分类:
感觉媒体(Perception),表示媒体(Representation)
zzvrlabbuaaeducnzzvrlabbuaaeducnxiaybbuaaeducnxiaybbuaaeducn北京航空航天大学计算机学院北京航空航天大学计算机学院多媒体系统与技术多媒体系统与技术十一五863计划信息领域四个专题1智能感知与先进计算2自组织网络与通信3虚拟现实与数字媒体4信息安全十二五国家高科技计划信息领域四个专题网络与通信3虚拟现实与数字媒体在在信息资源建设的信息资源建设的需求牵引下需求牵引下信息基础设施建设信息基础设施建设飞速发展飞速发展oommnnee多媒体技术多媒体技术丰富了信息资源丰富了信息资源的品种和描述能力的品种和描述能力网络技术网络技术增强了对信息资源增强了对信息资源的获取和应用能力的获取和应用能力面向对象技术面向对象技术缩小对信息资源的缩小对信息资源的认知和处理间的隔阂认知和处理间的隔阂嵌入技术嵌入技术扩展了信息资源向扩展了信息资源向其他领域的渗透能力其他领域的渗透能力哪些信息技术哪些信息技术将对未来信息社会产生深刻影响将对未来信息社会产生深刻影响促进信息促进信息资源的建设资源的建设构成人机和谐构成人机和谐的信息环境的信息环境基于面向对象方法基于面向对象方法发展面向发展面向agentagent技术技术信息资源环境信息资源环境的智能化的智能化intelligentintelligent人在网络中基于云计算和人在网络中基于云计算和海量信息的处理海量信息的处理信息资源环境信息资源环境的协同化的协同化cooperativecooperative可视化计算和可视化计算和虚拟现实技术虚拟现实技术信息资源环境信息资源环境的沉浸化的沉浸化immersiveimmersive信息技术的信息技术的全面嵌入和普适应用全面嵌入和普适应用信息资源环境信息资源环境的普适化pervasivepervasivevvp3cp3c多媒体应用技术三个一级三个一级类类学科交叉学科交叉计算机技术计算机技术通信技术通信技术广播电视技术广播电视技术两大学科支撑两大学科支撑电子技术电子技术大规模集成电路技术大规模集成电路技术多媒体技术是交叉学科决定了本门课程与其他课程交叉联系非常紧密发展迅速更新快新的知识点不断涌现很难面面俱到内容丰富涉及的学科领域繁多需要记忆的内容较多幸好内容大多基础比较简单
Autonomous-Underwater-Vehicles seminar

Topic SeminaronAUTONOMOUS UNDERWATER VEHICLESByVijay .S(U.S.N.4PS07ME093)DEPARTMENT OF MECHANICAL ENGG.P.E.S.C.E. MANDYAINTRODUCTION:An Autonomous Underwater Vehicle (AUV) is a robotic device that is driven through the water by a propulsion system, controlled and piloted by an onboard computer, and maneuverable in three dimensions. This level of control, under most environmental conditions, permits the vehicle to follow precise preprogrammed trajectories wherever and whenever required. Sensors on board the AUV sample the ocean as the AUV moves through it, providing the ability to make both spatial and time series measurements. Sensor data collected by an AUV is automatically geospatially and temporally referenced and normally of superior quality. Multiple vehicle surveys increase productivity, can insure adequate temporal and spatial sampling, and provide a means of investigating the coherence of the ocean in time and space.Autonomous underwater vehicle fall in to mobile robotics sector and are of brilliant importance to the present world military and commercial requirements. The need to find cutting edge in military research induces the invention of AUVs. This paper gives a glimpse on autonomous underwater vehicles and its applications.An autonomous underwater vehicle (AUV) is a robot which travels underwater without requiring input from an operator. AUVs constitute part of a larger group of undersea systems known as unmanned underwater vehicles, a classification that includes non-autonomous remotely operated underwater vehicles (ROVs) ± controlled and powered from the surface by an operator/pilot via an umbilical or using remote control. In military applications AUVs more often referred to simply as unmanned undersea vehicles (UUVs).HISTORY:The first AUV was developed at the Applied Physics Laboratory at the University of Washington as early as 1957 by Stan Murphy, Bob Francois and later on, Terry Ewart. The "Special Purpose Underwater Research Vehicle", or SPURV, was used to study diffusion, acoustic transmission, and submarine wakes.Newport's Auto-Mobile "Fish" Torpedo (1871)The torpedo had a two-cylinder reciprocating engine, operated by compressed air, which drove a 1-foot diameter, four-bladed propeller. A hydrostatic depth control mechanism was also used. The first torpedo trial was in 1871. The torpedo did run, but difficulty was encountered in obtaining a water-tight hull and an air-tight air flask. Azimuth control was a problem although the depth mechanism worked well.The origin of AUV¶s should probably be linked to the Whitehead Automobile ³Fish´ Torpedo. Robert Whitehead is credited with designing, building, and demonstrating the first Torpedo in Austria in 1866. Torpedoes are named after the Torpedo fish, which is an electric ray capable of delivering a stunning shock to its prey. Whitehead¶s first torpedo achieved a speed of over 3.0 m/s and ran for 700 m. The vehicle was driven by compressed air andcarried an explosive charge. If one ignores the fact that it carried an explosive charge, it might be considered the first AUV.Other early AUVs were developed at the Massachusetts Institute of Technology in the 1970s. One of these is on display in the Hart Nautical Gallery in MIT. At the same time, AUVs were also developed in the Soviet Union[1] (although this was not commonly known until much later).OVERVIEW:Mobile robots have the capability to move around in their environment and are not fixed to one physical location. In contrast, industrial robots usually consist of a jointed arm (multi linked manipulator) and gripper assembly (or end effector) that is attached to a fixed surface.Mobile robots are the focus of a great deal of current research and almost every major university has one or more labs that focus on mobile robot research. Mobile robots are also found in industry, military and security environments. They also appear as consumer products, for entertainment or to perform certain tasks like vacuum. CLASSIFICATION:Mobile robots may be classified by the environment in which they travel:y Land or home robots. (humanoid, or resembling animals or insects).y Aerial robots are usually referred to as unmanned aerial vehicles (UAVs)y Underwater robots are usually called autonomous underwater vehicles (AUVs)y Polar robots, designed to navigate icy, crevasse filled environmentsVEHICLE DESIGNS:Bluefin-12 AUVHundreds of different AUVs have been designed over the past 50 or so years, but only a few companies sell vehicles in any significant numbers. There are about 10 companies that sell AUVs on the international market, including Kongsberg Maritime, Hydroid (now owned by Kongsberg), Bluefin Robotics, International Submarine Engineering Ltd. and Hafmynd.Vehicles range in size from man portable lightweight AUVs to large diameter vehicles of over 10 metres length. Once popular amongst the military and commercial sectors, the smaller vehicles are now losing popularity. It has been widely accepted by commercial organizations that to achieve the ranges and endurances require d to optimize theefficiencies of operating AUVs a larger vehicle is required. However, smaller, lightweight and less expensive AUVs are still common as a budget option for universities.Some manufacturers have benefited from domestic government sponsorship including Bluefin and Kongsberg. The market is effectively split into three areas: scientific (including universities and research agencies), commercial offshore (oil and gas etc.) and military application (mine countermeasures, battle space preparation). The majority of these roles utilize a similar design and operate in a cruise mode. They collect data while following a preplanned route at speeds between 1 and 4 knots.Commercially available AUVS include various designs such as the small REMUS 100 AUV developed by Woods Hole Oceanographic Institution in the US and now marketed by Hydroid, Inc.; the larger HUGIN 1000 and 3000 AUVs developed by Kongsberg Maritime and Norwegian Defense Research Establishment; the Bluefin Robotics 12-and-21-inch-diameter (300 and 530 mm) vehicles and the International Submarine Engineering Ltd. Explorer. Most AUVs follow the traditional torpedo shape as this is seen as the best compromise between size, usable volume, hydrodynamic efficiency and ease of handling. There are some vehicles that make use of a modular design, enabling components to be changed easily by the operators.The market is evolving and designs are now following commercial requirements rather than being purely developmental. The next stage is likely to be a hybrid AUV/ROV that is capable of surveys and light intervention tasks. This requires more control and the ability to hover. Again, the market will be driven by financial requirements and the aim to save money and expensive ship time.Today, while most AUVs are capable of unsupervised missions most operators remain within range of acoustic telemetry systems in order to maintain a close watch on their investment. This is not always possible. For example, Canada has recently taken delivery of two AUVs (ISE Explorers) to survey the sea floor underneath the Arctic ice in support of their claim under Article 76 of the United Nations Convention of the Law of the Sea. Also, ultra-low-power, long-range variants such as underwater gliders are becoming capable of operating unattended for weeks or months in littoral and open ocean areas, periodically relaying data by satellite to shore, before returning to be picked up.As of 2008, a new class of AUVs are being developed, which mimic designs found in nature. Although most are currently in their experimental stages, these biomimetic (or bionic) vehicles are able to achieve higher degrees of efficiency in propulsion and maneuverability by copying successful designs in nature. Two such vehicles are Festo's AquaJelly and Evologics' Bionik Manta.SENSORS:AUV Model with sonar scanningSonar (originally an acronym for SOund Navigation And Ranging) is a technique that uses sound propagation (usually underwater, as in Submarine navigation) to navigate, communicate with or detect other vessels. Two types of technology share the name "sonar": passive sonar is essentially listening for the sound made by vessels; active sonar is emitting pulses of sounds and listening for echoes. Sonar may be used as a means of acoustic location and of measurement of the echo characteristics of "targets" in the water. Acoustic location in air was used before the introduction of radar. Sonar may also be used in air for robot navigation.AUVs carry sensors to navigate autonomously and map features of the ocean. Typical sensors include compasses, depth sensors, sidescan and other sonars, magnetometers, thermistors and conductivity probes. A demonstration at Monterey Bay in California inSeptember 2006 showed that a 21-inch (530 mm) diameter AUV can tow a 300 feet (91 m) long hydrophone array while maintaining a 3-knot (5.6 km/h) cruising speed. NAVIGATION:Long Base Line navigation system (LBL)Discription: Operation of a Long Baseline (LBL) underwater acoustic positioning system for ROV. Interrogator (A) mounted on the ROV transmits an acoustic signal that is received by baseline transponders (B, C, D, E). The reply of the baseline transponders is received by (A). Either the time-of-flight or the corresponding distances A-B, A-C, A-D and A-E are transmitted via the ROV umbilical (F) to the surface, where the ROV position is computed and displayed on a tracking screen.AUVs can navigate using an underwater acoustic positioning system. When operating within a net of sea floor deployed baseline transponders this is known as LBL navigation When a surface reference such as a support ship is available, ultra-short baseline (USBL) or short-baseline (SBL) positioning is used to calculate where the subsea vehicle isrelative to the known (GPS) position of the surface craft by means of acoustic range and bearing measurements. When it is operating completely autonomously, the AUV will surface and take its own GPS fix. Between position fixes and for precise maneuvering, an inertial navigation system on board the AUV measures the acceleration of the vehicle and Doppler velocity technology is used to measure rate of travel. A pressure sensor measures the vertical position. These observations are filtered to determine a final navigation solution. An emerging alternative is using an inertial navigation system in conjunction with either a GPS receiver, or an additional magnetic compass for Dead Reckoning whenever the GPS signal is lost.P RO P ULSION:AUV PropellerAUVs can rely on a number of propulsion techniques, but propeller based thrusters or Kort_nozzles are the most common by far. These thrusters are usually powered by electric motors and sometimes rely on a lip seal in order to protect the motor internals from corrosion. One consideration which impacts this process of waterproofing is the decision to use brushedmotors or brushless motors. This same consideration also impacts reliability, efficiency, and cost.P OWER:Most AUVs in use today are powered by rechargeable batteries (lithium ion, lithium polymer, nickel metal hydride etc), and are implemented with some form of Battery Management System. Some vehicles use primary batteries which provide perhaps twice the endurance²at a substantial extra cost per mission. A few of the larger vehicles are powered by aluminum based semi-fuel cells, but these require substantial maintenance, require expensive refills and produce waste product that must be handled safely. An emerging trend is to combine different battery and power systems with Ultra-capacitors.A PP LICATIONS:Until recently, AUVs have been used for a limited number of tasks dictated by the technology available. With the development of more advanced processing capabilities and high yield power supplies, AUVs are now being used for more and more tasks with roles and missions constantly evolving.COMMERCIAL:GAVIA Commercial AUV for oil rigsThe Gavia is the global provider of commercial AUVs known for its performance and adoptability. Best for surveying work as well as oil rig maintenance.The oil and gas industry uses AUVs to make detailed maps of the seafloor before they start building subsea infrastructure; pipelines and sub sea completions can be installed in the most cost effective manner with minimum disruption to the environment. The AUV allows survey companies to conduct precise surveys or areas where traditional bathymetric surveys would be less effective or too costly. Also, post-lay pipe surveys are now possible.MILITARY:Starfish 2 U.S.A. navyA typical military mission for an AUV is to map an area to determine if there are any mines, or to monitor a protected area (such as a harbor) for new unidentified objects. AUVs are also employed in anti-submarine warfare, to aid in the detection of manned submarines.On the military side of the equation, AUVs have been under development for decades, and they are now reaching an operational status. Their initial fleet application will be for mine hunting, which was also the case for fleet introduction of ROVs. However, in the case of AUVs, they will operate from a submarine and not a surface ship. The U.S. Navy¶s submarine launched AUV is the Long Term Mine Reconnaissance System (LMRS), which is scheduled for initial operation in 2003.RESEARCH:Sea duane 2 AUV from Flinders University Adelaide Australia.There is a ton of development in research sector of AUVs but the latest goes to Sea Duane 2 of Flinders University Australia. SD2 is used for underwater surface scanning and life assessment of deep sea organisms.Scientists use AUVs to study lakes, the ocean, and the ocean floor. A variety of sensors can be affixed to AUVs to measure the concentration of various elements or compounds, the absorption or reflection of light, and the presence of microscopic life. HOBBY:Many roboticists construct AUVs as a hobby. Several competitions exist which allow these homemade AUVs to compete against each other while accomplishing objectives. Like their commercial brethren, these AUVs can be fitted with cameras, lights, or sonar. As a consequence of limited resources and inexperience, hobbiest AUVs can rarely compete with commercial models on operational depth, durability, or sophistication. Finally, these hobby AUVs are usually not oceangoing, being operated most of the time in pools or lakebeds.FUTURE P OSSIBILITIES:³The trouble with our times is that the future is not what it used to be´. ±Paul Valery AUVs are now at an early stage of acceptance. As they work their way into the phase of operational acceptance on a commercial level, their numbers will grow. Academia i s not only using AUVs but also spinning off firms to supply commercial versions. And the US Navy is gearing up to push the technology, ensuring that cost-effective systems are available for use by the fleet in the future.Finding better ways of observing and reporting on the interior of the ocean, its seafloors and coastal boundaries remain principal objectives of the oceanographic community. Utilizing productive and affordable technologies that offer a new perspective of the ocean by providing sampling methodologies that merge the high spatial resolution of ship-based surveys with the endurance and temporal resolution of moorings may be one ³better way´ The broad use of this technology by the ocean science community is hopefully in our future.C&C Technologies, Inc.¶s AUV Hugin has proven that the cost of deep water survey operations can be reduced by 40% to 60% by using AUV¶s rather than conventional methods, while improving the quality of the data that is collected [12]. Given the budgetary constraints that face the oceanographic community and the need for high quality data, it is unwise to ignore this potential.REFERENCE:1.³Autonomous underwater vehicles´ ± Stefan Ericson et.al., Bluefin Robotics,Cambridge, U.S.A.2.³Individual and swarm style AUVs´ ± Dr. Uwe R. Zimmer, Australian NationalUniversity - Canberra, Australia3.³Underwater imaging, AUVs´ ± Dr. Steve Tetlow, Cranfield University - Cranfield ,U.K.4.³Sonar for underwater inspection´ - Morten Lind, Technical University of Denmark -Lyngby, Denmark。
大型开放式网络课程

感谢观看
国外的开放课程几乎都是在本校内受欢迎的课程,教授也几乎都是在本领域颇有建树的专家。据了解,耶鲁 大学每门开放课的制作费高达三四万美元,麻省理工学院每门开放课的制作费也需两万美元。将免费提供资源。 斯坦福大学校长约翰·L·汉尼希(John L. Hennessy)在最近的一篇评论文章中解释说:“由学界大师在堂授 课的小班课程依然保持其高水准。但与此同时,网络课程也被证明是一种高效的学习方式。如果和大课相比的话, 更是如此。”
2013年2月,新加坡国立大学与美国公司Coursera合作,加入大型开放式网络课程平台。新加坡国立大学是 第一所与Coursera达成合作协议的新加坡大学,它2014年会先通过该公司平台推出量子物理学和古典音乐创作的 课程。
2013年8月底,Coursera上首次出现来自台湾大学和香港中文大学的中文课程。2013年5月,中国内地高校 走出MOOC第一步,清华大学与北京大学老师把部分课程搬上edx,复旦大学及上海交通大学也在同年7月与 Coursera正式签约。
2012年,美国的顶尖大学陆续设立网络学习平台,在网上提供免费课程,Coursera、Udacity、edX三大课 程提供商的兴起,给更多学生提供了系统学习的可能。
2013年,香港科技大学、北京大学、清华大学、香港中文大学等相继提供网络课程。这意味着,更多大卫‧怀利在犹他州州立大学教授早期的大型开放式网络课程,或称为大型开放式网络课程原型, 一个开放给全球有兴趣学习的人来参与的研究生课程。在成为开放课程之前,这门课本来只有5个研究生选修,后 来变成有50个来自8个国家的学生选修。
2011年秋天大型开放式网络课程有重大突破:超过160000人透过赛巴斯汀‧索恩新成立的知识实验室(现称 Udacity)参与索恩和彼得‧诺威格所开设的“人工智能导论”课程。MOOC(大型开放式网络课程)
移动机器人开发技术(激光SLAM)第10课 机器人的定位及控制
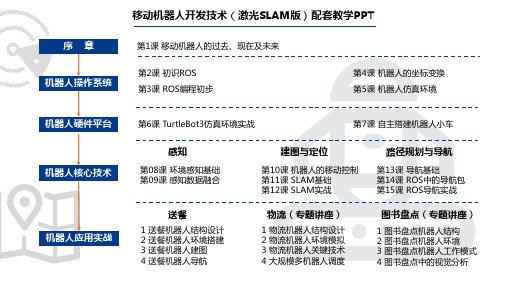
视觉
IMU
光电编码器
...
建立全局地图
机器人定位
路径规划
移动控制
速度控制
转向控制
之前内容
本讲内容
我在哪? 我要去哪里? 我该如何去?
2
机器人控制系统
北邮移动机器人与智能技术实验室 编
第10课 机器人的移动控制
2.1 机器人控制系统结构
机器人控制系统是指由控制主体、控制客体和控制媒体组成的具有自身目标和功能的管理系统: 非线性系统。引起机器人非线性因素很多,机器人的结构、传动件、驱动元件等都会引起系统的非线性。 多节点组成的一个多变量控制系统,且各节点间具有耦合作用。 是一个时变系统,其动力学参数随着运动位置的变化而变化。 是一个最优化系统,根据环境和任务要求选择最优化输出
行动
五官
传感器
大脑
处理器
大脑
处理器
外设
身体
人类
机器
最优化处理
目标识别
控制
数据处理
计算
流程
自主系统的目标是在无人干预的环境中工作。系统需要能够理解自身及周围环境,才能确定要采取的路径,以及让系统遵循该路径所要 下达的正确命令。
自主系统模型
感知
决策
行动
流程
真实的世界环境
多传感器
传感器标定及数据融合
局部地图
2
自主系统模型
机器人控制系统
第10课 机器人的移动控制
北邮移动机器人与智能技术实验室 编
3
机器人移动模型
4
控制数据的通信模型
5
控制机器人移动
6
误差修正与精确控制
1
自主系统模型
北邮移动机器人与智能技术实验室 编
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Raw Materials
Polycarbonate (1/8”, 1/4”)
Looks
really cool Not too hard to machine, unless it gets hot and softens 1/8” can be sheared and hand punched 1/4” can be cut using scroll saw and drilled Good for mounting gears
Raw Materials
Pegboard Hardboard Baltic Birch Plywood Sheet Aluminum Polycarbonate Prototyping Foam
Raw Materials
Pegboard (1/4” thick)
Great
for initial testing – already has ¼” holes on 1 inch spacing Useful in some specific applications, generally limited Can be cut with anything sharper than a butter knife
Bolts and machine screws
sizes
from ¼” down
Wood screws
Glue (hot glue, superglue, wood glue) Tape
Fasteners
Use the bolts! We have plenty
Washers
Raw Materials
Prototyping foam (2” blue foam)
Large
sheets available Good for bulky parts Cuts easily with hot knife Also can be sculpted with hot knife for
Maintenance
Be nice to your labmates
Bring
tools back as soon as you are done Put bolts into correct bin, or the mix bin to be sorted later. Just not into the wrong bin Drill bits have nice racks. Use them! Again, be nice to the benches! Take care when soldering, use scrap under workpiece when drilling
Quick,
Tools
Mitre saw
More
accurate wood cuts, any angle Use clamps for best result
Drill press
Wood,
plastic, metal (carefully) Clamp small or light pieces Punch is preferable for sheet metal – if you have to
Techniques: Metal bending
To bend without the brake, make guide cuts using snips (and holes along bend line for wide pieces)
This makes it bend where you want it to
protect softer materials like wood (one each at top, bottom)
Many ¼”-20 bolts, but also from #10-#2
Try to pick most appropriate size. Sometimes longer
are great for temporary fasteners, as well as permanent ones Use lock washers to prevent loosening from vibrations – teeth bite into surface of material and nut
Mechanical Issues
January 4th, 2005
Aaron Sokoloski
Agenda
The Maslab Workshop
Raw Materials Other Materials
Fasteners Tools Safety & Maintenance
Fasteners
Wood glue – best with wood screws for
permanent joints.
Make
a solid piece out of multiple pieces When glue dries, stronger than the wood around it. Dry time is long, though
larger range of motion
Techniques
• Many possibilities with wood and bolts
Simple Rotating Gripper
Techniques: Mounting IR and Servos
IR range finder
Servomotor
drill, make sure the piece will not cut you if it binds Make sure to use harder drill bits for metal
Tools
Shear / Brake
Cuts
thin materials only (1/16 sheet aluminum and polycarbonate)
interesting / irregular shapes
Other materials
Wooden dowels Hollow metal tubing Springs PVC pipe Foam pipe insulation Gears Others…
Fasteners
bolts can eliminate need for additional pieces For loose but permanent connection, tighten 2 nuts against each other
Fasteners
Bolts continued
Bolts
Safety
Байду номын сангаас
Wear goggles when in shop area
You
may not be using a dangerous tool, but someone else might
If you’re unsure about a tool’s use, ask! Use fan when soldering Be nice to the benches
Tools
Hacksaws, wood saw
Cut
wood, PVC, cardboard
brass tubing – turn and tighten gradually but inaccurate
Pipe cutter (small red gadget)
Cuts
Rotary cutting tool
Superglue – quick and dirty, or use with other fasteners for permanence
Fasteners
If you’re not sure how well a joint will work, use scrap and test it Testing mechanical parts is a good idea in general, just like software Design for assembly and re-assembly
Raw Materials
Hardboard (1/4” thick)
Pegboard,
without the holes Better for intermediate designs (cheap!)
Hardboard used during development can be
Mechanical issues
Motors Techniques
Principles
Other resources
Design
The Maslab Workshop
Goal:
Be able to build a simple robot with the tools and materials provided in the Maslab Workshop
Tools
Scroll Saw
Thin
(1/4”) wood and polycarbonate only Makes curved cuts Don’t force the blade in any direction, medium
pressure will cut