基于MSP430的小车自动保护系统
基于MSP430的多功能小车

基于MSP430的多功能小车摘要:本小车以MSP超低功耗单片机MSP430F168为控制核心,通过各种传感器采集外部信号,经过信号放大及滤波电路对信号进行处理后,利用单片机进行综合判别及对信号的运算处理,通过指令控制执行部件工作。
结合各信号处理及控制电路实现了小车的寻迹、避障、避悬崖、寻光、语音录放等功能,并且能够精确地在停车线附近停车。
本设计采用单片机输出PWM信号给集成驱动芯片来控制直流电机,使用了反射式红外传感器ST188检测红外线信号来矫正行车路线以及躲避障碍物和悬崖,通过光敏电阻检测光强。
多传感器并行工作,MCU 则提供外部检测信号综合处理,并控制小车的正确运行。
关键字:MSP430F168 PWM 寻迹避障避悬崖语音录放前言:多功能小车采用MSP430F168为控制器,采用多传感器进行信息采集,运用反射式红外传感器ST188进行路径检测和速度控制。
另外,采用PWM技术控制小车电机的转向与转速,系统还扩展了语音录放及趋光等功能。
此外,寻迹算法的采用使小车行进性能更加优越。
1.系统方案设计和论证系统可以划分为以下几个基本模块,其模块组成1.1控制核心的选择采用以MSP430F168为控制核心,所有编程语言围绕MSP430F168进行描述。
MSP430F168单片机,功耗低、运算速度快、精度高、外围模块丰富,像该单片机片上自带的比较捕获单元能够方便的产生频率和占空比可调的PWM信号,比其他单片机使用定时器来实现方便得多。
1.2检测方案的选择红外线光电传感器ST188能够检测到一定距离内自身发射的红外线信号,以下各功能模块的实现基于它的这个特性。
寻迹时小车行驶的跑道贴有黑色胶带,通过不同颜色背景对于光线的反射系数不同能够实现对寻迹时黑线的检测;而在避障环节则通过传感器能否接受到自身发出的红外线来判断前方是否存在障碍物;避悬崖实现原理与此类似,只是传感器安装方式不同。
使用ST188可以方便地实现实时监控,有效的防止误触发,灵敏度容易控制,而且可以改变电阻来增加红外光电传感器的探测距离,因此选择方案三。
基于MSP430单片机的智能小车控制系统设计

设计与分析◆Sheji yu Fenxi
电三极管,且将发射管和接收管集为一体,使探测器结构紧凑体,
易于单片机接口;RPR220 内置可见光过滤器可以减少散射光的影
响,不但检测可靠,而且无需另作遮光处理。
2.3 驱动模块
驱动模块主要功能:控制舵机输出转角,驱动小车加减速行
驶。此模块包括舵机驱动模块和电机驱动模块。
日以及小车行驶的速度和ຫໍສະໝຸດ 声波测距的结果。[9] 谭浩强.C 语言程序设计[M].第 2 版.清华大学出版社,2000
3 软件设计
智能小车系统软件设计核心部分包括:自主寻迹控制、超声波 测距和电机转速测量。系统软件设计采用 C 语言,程序是在 ADS1.2 集成开发环境下开发的。
收稿日期:2011-05-28 作者简介:魏声云(1989—),男,江西九江人,研究方向:电子信息 工程。
先根据被测物体的距离范围设定反射脉冲时间间隔,调整振荡器 触发时间。定时器提供触发电路和门电路的控制信号。图 5 为超声 波测距集成模块电路组成框图。
[参考文献] [1] 胡大可.MSP430 系列超低功耗 16 位单片机原理与应用[M].航空
航天大学出版社,2000
功放
40 kHz
定时器
被
[2] 唐磊,邱羽.基于 MSP430 步进电机控制器的设计[J].煤炭技术, 2011(30):50~51
GND
2
LM2596
+
D2
L2 C4
B2
R6
1
2
自主寻迹控制:通过 RPR220 读取道路信息,分析小车所处的 位置和方向,通过增量式 PID 控制算法调节小车的速度及转角,同 时通过电机的差速控制小车行进的转弯。使小车能够准确地寻迹 行驶。程序流程图如图 6 所示。
基于MSP430单片机循迹小车

课程设计报告课程名称嵌入式系统原理与设计课题名称智能循迹小车专业通信工程班级 1101班学号姓名指导老师2014 年 1 月 5 日1.系统总设计1.1 功能说明本课题是基于MSP430单片机循迹智能小车的设计与实现,小车系统以MSP430单片机为系统控制处理器,采用红外传感器对赛道进行道路检测,单片机根据检测到的信号的不同状态判断小车的当前状态,通过电机驱动芯片L298N发出控制命令,控制电机的工作状态以实现对小车的控制。
1.2 任务分配情况参与此次项目制作的一共七人,分别是:张振凤,冯志成,肖新加,戴小敏,杨小林,谢鹏华和张莹任务分配情况如表1所示:表1 任务分配情况冯志成张莹红外循迹模块肖新加,代小敏,杨小林电机驱动模块张振凤谢鹏华写程序,各接口的连接,数据的收集及小车的调试1.3 使用说明书产品名称:智能循迹小车技术参数:L298N基本参数:类型:半桥输入类型:非反相输出数: 4电流输出/同道:2A 电流峰值输出:3A工作温度:-25~135°C 器件型号:L298N产品的使用方法:用六节干电池9V直流电压作为供电电源,接通电源,在有黑线的跑道上行走。
注意事项:1、所用电源不能超过9V,以免电压过大,把电机烧坏。
2、小孩使用时,应在大人的陪同下使用,以免被小车的尖锐部分弄伤。
3、轻拿轻放,以免损坏小车器件。
4、长期不使用时,应把电池取出。
生产日期:20xx年xx月xx日2.硬件设计此次项目中硬件部分的设计主要包含以下模块:电源模块,红外循迹模块,电机驱动模块和MSP430f149单片机。
2.1 电源模块模型车通过自身系统,采集赛道信息,获取自身速度信息,加以处理,由芯片给出指令控制其前进转向等动作,各部分都需要由电路支持,电源管理尤为重要。
在本设计中,在本设计中,msp430单片机使用5V电源,电机使用5V电源。
用了6节1.5V的电池,为单片机和电机供电。
如图所示:图1 电源实物图其红线接电机驱动模块上的VDD接口,绿线连接GND接口。
基于MSP430的智能车主动安全系统设计

0 引言
随 着我 网汽 车行 业 的飞 速 发展 , 特 别 是 人们 经 济 生 活 水 平 不断 提高 , 埘汽车 保 有量 不 断 r I 二 升, 数据显示 2 0 1 5年 中 国 汽 车全 年 的汽车 销量 为 2 5 1 3万辆 , 中国已经 成 为汽 车 生产 和 消 费大 国 。随着 而来 的是 人们在 车辆 行驶 过程 中的安全 问 题 日益突 出 , 交通 事故 带给 人们 巨大 的伤 害和损 失 , 研 究数 据 表
a u t o mo b i l e ma n u f a c t u in r g c o mp a n i e s i n r e c e n t s t u d i e s . T h e s ma t r c a r wi t h a c t i v e s a f e t y d e v i c e s i s u s i n g o f MS P 4 3 0 a s t h e c o n t r o l , I t c o n t a i n s u l t r a s o u n d, i n f r a r e d s e n s o r s a n d Bl u e t o o t h t e c h n o l o g y .B y t e s t i n g, t h e s ma r t e a r c a n b e a c h i e v e d wi t h t h e a c t i v e s a f e t y . wh i c h
《自动化与仪器仪表1 2 0 1 6年第 l 2期 ( 总第 2 0 6期)
基 于 MS P 4 3 0的智 能 车主 动 安 全 系 统 设 计
隋 涛 , 朱威 强 , 冯 川 , 王 博
基于MSP430智能小车的设计
第 2 O卷 第 5期
Vo .0 1 2
No5 .
电子设 计工 程
El cr n c De i n En i e rn e to i sg g n e i g
21 0 2年 3月
Ma . 0 2 r2 1
基于 MS 4 0智能 小车 的设计 P3
李坤峰 , 成 华 傅
L n f n ,F C e gh a IKu —e g U h n — u
(ih a nvr t o c n e&E gn ei ,i n 30 , hn ) Scu nU i sy fS i c e i e nier g Zg g6 0 0 C i n o 4 a
Ab t a t An i tl g n a e c b d, i h i b s d O e MS 4 0 2 7 . h a s su t s n c rn i gt c n lg s r c : el e t ri d s r e wh c a e f t P 3 F 2 4 T e e ru e l a o i a gn h oo y t n i c s i s h r e o a h e e a t ma i b tc e a od n e n t h a i h o g oc d l r a c s h it n e b t e n t e c r c iv u o t o s l v i a c ,a d a e s me t c a t me t r u h v i emo u e t b o d a t e d sa c e w e h a o t a d t eo s ce I r e k e dsa c o f ce y t mp rt r ,t et mp r tr e s r t e l i ee t n o n b t l . n o d r oma e t itn en t e td b e e a u e h e e au e s n o h r a- med t ci f h a t h e wi t o
基于 MSP430控制的智能小车设计
f 2 1 黄智伟 . 全 国大 学生电子设计 竞赛训 练教程 【 M ] . 北京 :电子工业 出版社 ,2 0 0 5
Hu a n g Z h i we i . T h e N a t i o n a l U n d e r g r a d u a t e El e c t r o n i c D e s i g n C o n t e s t T r a i n i n g T u t o r i a l [ M] .B e i j i n g :P u b l i s h i n g Ho u s e o f
过 长 的后 果 ,严 重 的影 " M/ J ' 车 的快 速 性 和 稳 定 性 。 为 了解 决 这 个 问题 ,可 以 在 P I D调 速 控 制 中 加入 B AN G — B AN G控 制 思 想 :根 据 e r r o r l 的 大 小 ,如果 正 大 ,则 正 转 给全 额 占空 比 ;如 果 负 大 , 则 自 南停 车或 给一 个 反 转 占空 比 ;否 则 就 采 用 P I D 计算 的 占空 比 。
2 01 1 , 1(6 ) :5 4 —6 4 .
[ 4 1 许 大巾 ,胡益 康 . 电机控 制 【 M] . 浙 江 :浙江大 学出版社 ,2 0 0 5 .
Xu D a z h o n g ,h e Y i k a n g . Mo t o r c o n t r o l [ M] . Z h e j i a n g :Z h e j i a n g Un i v e r s i t y p r e s s ,2 0 0 5
。
I
t|
* 毒
3 控 制算 法 P l D 的 实 现
基于MSP430F5529的循迹壁障无线控制智能小车设计_毕业设计论文
华中科技大学电子与信息工程系2013年TI杯电子设计大赛项目总结报告项目名称:基于MSP430F5529的智能小车设计团队成员:通信工程通信工程通信工程课题名称:智能小车自动控制系统【摘要】本次课程设计以MSP430超低功耗单片机系列MSP430F5529为主控制器,附加电机、电池、传感控制模块等,完成二驱小车自由运动、检测黑白线实现沿轨道自动运行、能够避开障碍物、无线控制等功能,F5529的I/O口丰富,使得各个功能模块之间信息交流快捷方便。
在机械结构上,我们选购用一个万用轮代替两个前轮的小车,大幅度提高了小车的灵敏度。
利用单片机产生PWM波,控制小车速度,选用L298N驱动芯片驱动电路,使用三路红外对接管检测黑白线,使用一个超声波实现测距壁障功能,使小车能够自动左转避开障碍物,使用无线控制模块,可实时控制小车运动。
基于可靠的硬件设计和更加优化的软件算法,在实现本课设基本要求的基础上,可实现部分扩展功能。
【关键词】:MSP430F5529 循迹无线控制超声波测距壁障Abstract This curriculum project uses MSP430F5529, in the series of MSP430 ultra low power single chip microcomputer, as its main controller. In addition, the realization of the controller’s function can not leave motor, battery, sensing control template and so on, for example, free movement of the two drive vehicle, and automatic operation along runway by testing black and white lines, avoiding obstacles, wireless operation and other functions. The quick and easy information exchanging among each functional template has to thank to the abundance of I/O of F5529. On mechanical structure, two front wheels of the mini car are replaced by a universal wheel, so as to improve its sensitivity by large margin. PWM is used to control motor and single chip microcomputer to make PWM wave, in order to control its speed. The car can stop and turn left to avoid obstacles because L298N driving chip drives circuit, three infrared ray on pipes is used to test black and white lines, and an ultrasonic template is chosen to realize ranging barrier function. With wireless operating template, movement of the mini car can reach real-time control. Besides finishing basic requirement of this curriculum project, some broadening functions can also be achieved based on reliable hardware design and better software algorithm.Key words: MSP430F5529 tracking wireless control ultrasonic wave ranging counterguard目录1 概述 (3)2 设计目标 (3)3 团队组成与任务分工 (4)4 方案论证 (4)4.1 电机驱动模块 (4)4.2 循迹模块 (5)4.3 无线模块 (5)4.4 测距壁障模块 (5)5 系统总体设计 (7)5.1 总体设计思路 (7)5.2 主要器件选择 (7)5.3 主要元器件清单 (8)7 系统各模块设计与实现 (15)7.1 电机驱动模块 (15)7.2 循迹模块 (16)7.3 无线模块 (16)7.4 超声波测距壁障模块 (17)9 心得与总结 (26)10 致谢 (27)11 参考文献 (27)12 附录 (27)1.概述随着控制技术及计算机技术的发展,智能车系统将在未来工业生产和日常生活中扮演重要的角色。
基于MSP430单片机距离保护系统的设计
基于MSP430单片机距离保护系统的设计摘要:本文介绍了一种基于MSP430单片机的距离保护系统设计。
该系统可以有效地检测并显示周围环境中的障碍物距离,并及时发出警报声以提醒驾驶员注意安全。
系统的实现采用了超声波传感器和MSP430单片机进行数据采集和处理。
实验结果表明,该系统具有高灵敏度、准确性和稳定性,能够满足距离保护的相关要求。
关键词:MSP430单片机;距离保护;超声波传感器;警报声;安全一、介绍目前,汽车行业对距离保护系统的需求越来越高。
距离保护系统可以在行驶中帮助驾驶员监测道路上的障碍物和其他车辆,提高驾驶的安全性和稳定性。
超声波传感器是距离保护系统的一种常用传感器,可以通过发射和接收超声波信号来测量障碍物距离。
MSP430单片机是一种微控制器,具有低功耗、高性能和丰富的外设接口,可以用于智能控制、数据采集和处理等方面。
在本文中,我们将介绍一种基于MSP430单片机的距离保护系统设计。
该系统可以通过超声波传感器检测周围环境中的障碍物距离,并将数据显示在液晶屏上。
同时,系统还可以发出警报声以提醒驾驶员注意安全。
本文的结构如下:第二部分介绍系统的设计原理和实现方法;第三部分是实验结果和分析;第四部分是总结和展望。
二、设计及规划该系统主要由MSP430单片机、超声波传感器、液晶屏和蜂鸣器等组成。
为了实现障碍物距离的测量和显示,本系统采用了一种超声波传感器。
超声波传感器可以通过发射超声波信号,并测量反弹回来的信号,计算出障碍物与传感器的距离。
具体来说,传感器将高频信号转换成超声波信号,经过一段时间后,反射回来的信号被传感器转换成电信号,并由MSP430单片机进行采集和处理。
MSP430单片机通过测量发送和接收信号之间的时间差来计算障碍物与传感器的距离。
图2显示了超声波传感器测量距离的原理。
本系统使用MSP430单片机进行数据采集和处理。
MSP430单片机具有低功耗、高性能和丰富的外设接口,可以用于智能控制、数据采集和处理等方面。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于MSP430的小车自动保护系统【摘要】本小车以MSP超低功耗单片机系列MSP430F449为核心,模拟我国自主研发的ATP列车自动保护系统,完成寻迹、检测站台(金属)、避障、测速并显示等功能。
采用PWM 驱动芯片控制电机,使小车在一个的圆形轨道上行驶,利用接近开关检测站台控制停车,红外传感器检测黑线模拟的轨道及障碍物进行避障,能够实时显示当前速度和停靠时间。
基于可靠的硬件设计和稳定的软件算法,整个系统的电路结构简单,可靠性能高,测试结果满足要求。
【关键词】MSP430;A TP;寻迹;避障;测速0 引言为保证列车的正常运行,我国自主研发了ATP列车自动保护装置。
ATP (Automatic Train Protection),是指列车自动保护装置,主要功能是防止列车相撞列车运行方式:正常情况下,列车是以一定的间隔时间与间隔距离追踪运行的。
ATP子系统采用自动闭塞方式,也就是将轨道线路划分成若干个小区间,称为闭塞分区。
每个闭塞分区都装有轨道电路,轨道电路内有列车检测信号的发送和接受装置,以及机车信号的发送装置。
本设计就是模拟ATP列车自动保护系统制作的。
采用PWM驱动芯片控制电机,使小车在一个半径4米的圆形轨道上行驶,利用接近开关检测站台控制停车,红外传感器检测黑线模拟的轨道及障碍物进行避障,能够实时显示当前速度和停靠时间。
1 系统设计1.1 基本要求1.1.1 制作一个半径4米的圆形轨道,可用黑色胶带(宽度在1-2cm之间)铺设在地面来模拟轨道。
轨道下方需分开放置5枚一角硬币以示站台,旁边架设标识分别为站台1至站台5。
要求每两个站台之间距离不得小于2米。
1.1.2 制作一辆列车(可用一般小车构架),能够沿着铺设的轨道正常行驶,不能脱轨。
并可以设置速度(10cm/s至25cm/s之间);每到一个站台可以停靠一段时间(2秒到10秒之间)。
要求列车停靠位置与站台的偏移不超过10cm(不允许后退)。
1.1.3 前方障碍物在100cm之外绿灯亮,以示安全车距;前方障碍物在35~100cm时黄灯亮,以示预警车距;前方障碍物在35cm之内红灯亮,以示危险车距,并能够自动停止。
误差不大于5cm。
检测到障碍排除后能继续自动运行,障碍物为遥控小车或者同种类型的列车。
1.1.4 设列车与障碍物的距离为S,预设车速为Vpreset。
当S<100cm时,要求列车速度V=(S-20)×Vpreset/80以防止追尾事件发生。
1.1.5 列车运行过程中能够实时显示当前速度,停靠时间;当小于安全距离100cm时,列车能够实时显示与障碍物之间的距离。
1.2 系统方案的确定根据题目要求,将控制对象及检测目标划分为不同模块,即障碍物检测、站台(金属)检测、路面轨道检测、速度时间检测等模块。
针对不同模块的控制要求分别采用不同的设计方案实现。
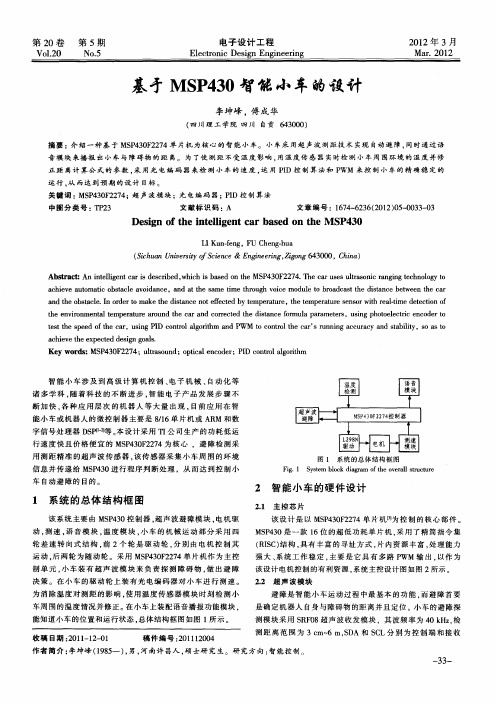
系统组成及原理框图如图1所示。
其中收发一体式红外管用来检测小车的运行轨迹,金属探测传感器用来检测轨道下的硬币,红外对管用来检测小车前进方向的障碍物,编码器用于检测小车行驶的速度,并将测量数据传送至单片机进行处理,然后由单片机根据所检测的各种数据实现对电动车的智能控制。
这种方案能实现对电动车的运动状态进行实时控制,控制灵活、可靠,精度高,可满足对系统的各项要求。
图1 系统方案框图图2 电机驱动电路2 硬件电路设计与实现2.1 电机驱动模块电机驱动电路我们选用两半桥驱动芯片BTS7960 构建的全桥驱动电路,BTS7960是集成的大电流半桥驱动,其内部包含了一片NMOS、一片PMOS 和一片半桥门集驱动。
其两路PWM 输入信号由MSP430单片机直接提供,使电路布线更简单,同时降低了系统的不稳定因素。
通过改变PWM 的占空比来改变电机转速的快慢,通过控制输出电压的大小、正负控制电机的正反转,达到直道加速、弯道减速、刹车等效果。
如图2所示。
2.2 轨道寻迹模块由六个Tcrt5000红外传感器构成探测器固定在底盘前沿,贴近地面。
正常行驶时,发射管发射红外光照射地面,光线经白纸反射后被接收管接收,输出高电平信号;电动车经过黑线时,发射端发射的光线被黑线吸收,接收端接收不到反射光线,传感器输出低电平信号后送MSP430单片机处理,判断执行哪一种预先编制的程序来控制车的行驶状态。
模块电路图如图3所示。
图3 轨道寻迹模块2.3 金属检测模块采用LJKD8N金属接近开关来检测硬币,当金属接近时,高频磁场在金属中产生了涡流,使得LC谐振回路的震荡幅度下降到阈值电压,开关输出信号。
LJKD8N为直流三线NPN常闭,电路如图4所示。
图4 金属检测模块2.4 避障模块采用两组红外传感器,分别偏左和偏右一个小角度,使红外能检测到圆弧上的障碍。
利用555定时器发出可调制的38KHz红外线,将红外接收头的信号送给单片机,单片机检测到信号后让小车做出停车动作。
避障模块如图5所示。
图5 避障模块图6 555定时器构成的38K调制信号2.5 测速模块我们通过对编码器脉冲计数的方法来实现对小车速度的检测:在靠近小车右轮的轴上装光电编码器,这样当小车前进,车轮转动时,光电编码器跟随车轮同步转动,产生脉冲送给单片机,单片机捕捉脉冲信号并对其进行计数。
在一特定时间内读出脉冲总数,将该总数除以车轮转动一圈移过的脉冲数目,便可以计算出车轮的转动圈数,再乘以车轮周长,得到行驶路程,再除以计数时间,最后得到小车的速度。
2.6 电源模块小车采取单电源供电,由于传感器需采用5V 供电,主控制芯片采用3.3V供电,故电源模块的电路如图7所示。
利用LM2941制作稳压电源,其中Vin接电池,用电位器可以调节输出电压。
分别用电位器将输出电压调到3.3V和5V,分别给传感器和控制芯片供电。
图7 电源模块2.7 显示模块采用DM12864M汉字图形点阵液晶显示屏,在小车行驶过程中显示行驶速度及停靠站台时间。
3 软件设计3.1 MSP430本系统采用两片MSP430F449“双核”结构。
之所以采用MSP430 单片机,主要时因为该系列单片机有许多优秀的特点,非常适合用于本系统。
首先,MSP430 单片机引入了时钟系统的概念,将CPU、外围功能模块、休眠唤醒机制三者相互独立,这就可以通过软件设置时钟分频实现系统不同程度的休眠,让系统以间歇方式工作最大限度的节省电力,我们小车系统就是使用Basic Timer 定时唤醒。
其次,MSP430单片机内核时16 位RISC 处理器,单指令周期,运算能力,处理能力都具有一定的优势,完全可以满足我们小车寻线、避障、寻光等多个功能的实现,CPU可以在1.8-3.3V宽电压供电。
第三,MSP430系列单片机采用模块化的结构,每一种模块(内部资源)都具有独立而完整的结构,在不同型号的结构中,同一种模块的使用方法和寄存器都时相同的。
这为学习和开发MSP430 单片机提供了便利。
比如说我们的双核系统内部都用到了TA定时器,UART0 串口,这样的话开发时就可以只对底层程序稍作修改用于不同型号的MSP430单片机。
第四,MSP430 内置资源非常地强大,它不仅仅只是一个微处理器系统,还包含了模拟电路、模数/数模转换电路、显示接口等丰富的外设。
要完成对小车的巡线,寻光,避障,显示距离,计时等功能,除了必要的传感器和电机驱动芯片以外,一个完整系统所需的所有外设都集成在了430 芯片上。
两片MSP430单片机几乎提供小车的解决方法。
3.2 寻迹算法采用PID(PD)控制算法,如果某时刻检测到黑线偏左,就要向左转弯;如果检测到黑线偏右,就要向右转。
偏得越多,就要向黑线方向打越大的转角。
这就是比例控制(P)。
遗憾的是,因为小车有惯性。
假设黑线偏左,说明小车偏右了,需要左传舵,等到小车回到中心的时候,停止转舵,可是小车的惯性会使车身继续左转,直到冲过黑线,黑线又偏右。
然后控制过程反复,车身是在左右摇摆中向前行走的。
这种摇摆叫做“超调”,超调越大,控制越不稳定,容易出轨。
为了克服惯性,我们除了位置信息之外,还需要知道轨迹的变化趋势。
我们可以用黑线位置的微分值来提前得到变化趋势。
用本次位置减去前次位置求出差值,就大致知道偏移量的变化趋势。
将该差值和比例相加后一起作为控制量,即可实现提前控制。
这就叫做比例微分控制(PD控制)4 系统测试4.1 测试仪表(表1)表14.2测量结果(表2)5 总结从测试结果来看,PWM技术能够极大地提高电动机的驱动效率;收发一体式红外传感器解决了小车严格按照轨迹(黑线)运行的问题;金属传感器能够准确找到站台的位置并能使小车准确停车,红外传感器能够精确探测到障碍物,为躲避障碍物提供了较好的测量方法;编码器可精确测量运行中的转速。
从运行情况看,采用本方案设计制作的智能小车,系统可靠性较高,运行稳定,定位准确,达到了设计要求。
表2按照要求,小车已经很好地完成了所有题目要求的任务。
本作品涉及到了一系列光机电一体化的技术。
其中机械结构是小车能否稳定运行的基础,硬件电路决定了小车实现的功能,而软件部分则是控制的灵魂,算法的好坏直接决定了完成任务的质量。
在使用MSP430的开发过程中,我也充分体会到了这款单片机的性能优越性和便利性,其单芯片设计方案对提高产品集成,降低系统成本有很大的帮助。
最终核算,整个小车成本不超过300元。
整个项目的研发无疑是一个充满辛苦和愉快的过程。
【参考文献】[1]雷思孝,李伯成,雷向莉.单片机原理及实用技术[M].西安:西安电子科技大学出版社,2004.[2]朱益斌湖学龙,朱亚锋,等.自主式寻迹机器人小车的设计[J].国外电子技术测量,2006.[3]王福瑞,编著.单片微机测控系统设计大全[M].北京:北京航空航天大学出版社,2000.1.[4]吴建平,殷战国,曹思榕,等.红外反射式传感器在自主式寻迹机器人导航中的应用[J].中国测试技术,2004.。