基于嵌入式TCP/IP协议栈的六自由度平台控制系统
基于ARM核的嵌入式TCP/IP协议栈简化实现

Smp i e aiain o mb d e C / P P oo o tc s d O i l d Re l t fE i f z o e d d T P I r tc lS a k Ba e i ARM o e l C r
X a. nr LU J . n 一,WA G Y .u l U H i u I i g g, i na 。 N i aI h ]
维普资讯
第 1 期 0
徐海军等 : 于 A M核的嵌人式 T WI
基 于 A M 核 的嵌 入 式 T P I 议 栈 简 化 实现 R C /P协
徐海军 ,刘金 刚 ,王益华
( ・ 算机 科 学 联 合研 究 院,北 京 103 ;2 中国科 学 院 计 算技 术研 究 所 计 1 00 7 .
smpi ep oo o t c s c mmu i ai nmo e , rh t cu e s h me i l y t r t c l a k’ o f h s n c t d l a c i t r ,c e .An e t i a e ie o o s mi g cr u t f o e d t n, h s p rgv sal w c n u n i i o h p c
n t r o ew0 k c mmu iai n b s d O h c o r c s o fS ms n 3 4 B X, i h t k sRT g 1 AS a h sc ll y ri tr n c t a e i t emir p o e s ro a  ̄ gS C 4 O wh c a e L 0 9 sp y i a a e n e — o l fc .F n l I c sf l o t g t e e e d d iC i u n t e mir p o e s ra d r aie i h l ewo k c mmu iai g b a e i al s ̄ e sul p r n mb d e L n x o h co rc so n e l srg t n t r o y c y i h  ̄ z y nc t y n S c e p o r mmi g t c iv h e in g a y tsi g ok t rga n ,i a h e et e d sg o lb e t . n
六自由度飞行模拟器运动系统设计研究

六自由度飞行模拟器运动系统设计研究一、内容概要随着科技的发展,飞行模拟器在航空领域的应用越来越广泛。
六自由度飞行模拟器作为一种高性能的飞行模拟器,其运动系统的设计对于提高飞行模拟器的性能和用户体验具有重要意义。
本文主要研究了六自由度飞行模拟器运动系统的设计方案,包括运动控制系统、传感器系统、执行器系统等方面的设计。
通过对现有技术的分析和对未来发展趋势的预测,提出了一种适用于六自由度飞行模拟器的运动系统设计方案。
首先本文介绍了六自由度飞行模拟器的基本原理和结构特点,为后续的运动系统设计提供了理论基础。
然后详细阐述了运动控制系统的设计,包括控制策略的选择、控制器的设计和算法优化等方面。
在此基础上,本文探讨了传感器系统的设计,重点关注了惯性导航系统、力矩传感器和加速度计等关键传感器的选型和布局。
此外本文还对执行器系统进行了深入研究,包括电动缸、舵机和驱动器等关键部件的设计和优化。
为了提高飞行模拟器的稳定性和精度,本文还对运动系统的标定方法进行了研究,提出了一种基于模型预测控制(MPC)的自适应标定方法。
本文对所提出的六自由度飞行模拟器运动系统设计方案进行了验证和实验,结果表明所设计的系统能够满足飞行模拟器的需求,具有良好的性能和稳定性。
本文通过研究六自由度飞行模拟器运动系统的设计方案,为提高飞行模拟器的性能和用户体验提供了有益的参考。
在未来的研究中,可以进一步优化运动系统的设计方案,以满足不同应用场景的需求。
1.1 研究背景和意义飞行模拟器技术在现代航空、航天等领域具有重要的应用价值,它可以为飞行员提供真实的飞行环境和训练条件,帮助他们熟悉各种飞行操作和应对紧急情况。
六自由度飞行模拟器是一种高级的飞行模拟器,它可以模拟飞机在空间中的六个自由度(平移、俯仰、滚转、偏航)的运动,为飞行员提供更加真实和全面的飞行体验。
然而目前市场上的六自由度飞行模拟器运动系统存在一些问题,如运动稳定性差、响应速度慢、精度不高等,这些问题限制了飞行模拟器的实际应用效果。
基于TMS320DM642的嵌入式TCP/IP协议栈的实现

T FN P I
1 4
3
∞ m
Ⅷ1 咄
模块
∞ I O
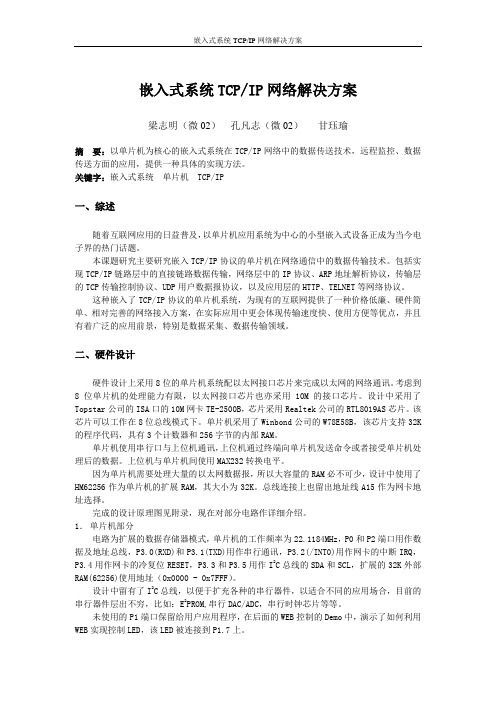
图 3 D 6 2与 L T 7 设备 的连接 M4 X9 1
图 1T Pl c/P协议栈 软件模 型 第 三 层 是传 输 层 ,完 成 数 据 报 的传 输 控 制 。该 层 主 要 包 括 T P 议和 U P协议 。TP提供 可靠 的数 据传 输 ,而 UP提供 不可 C协 D C D
( )系 统结 构 一
硬件 系 统结构 如 图 2 示 。 所
主 频 高达 60 H ,片上 集 成 以太 网接 口 ,不 仅 在硬 件上 将嵌 入 式 0M z
产 品 的网 络应 用 成 本减 少 5% 0 。本 文 采用 T 公 司 的 T S2 D6 2 I M 3 0M 4 芯 片设 计与 It l 司 的 LT 7 网卡 的硬 件 接 口 电路 ,并 在 D P ne 公 X91 S
络 的连 通 情况 。
Ⅸ 呻3 D ]
 ̄lI ' gK
D 6 2与 L T 7 A的连 接如 图 3所示 。 M4 X91
¨
RD03 X [: ]
T 阡
l l
6
模块
町x
T XE N
TF PN O
9
8
cS R
IgW P"
1 6
1
R B XV
发 器 L T 7 A X91。
D6 2 T 公 司推 出 的一 款 面 向数字 多媒 体应 用 的 D P M4 是 I S ,因 集 成 了 以太 网 MC接 口,所 以需 要一 个 物理 层 网络 处 理芯 片 。本 A
ne X91 M4 I接 第 二层 是 网络层 ,完 成 I P数据 报 的封装 和转 发 ,并根据 帧 的 文 采 用 了 It l公司 的 LT 7A芯 片 。D6 2的 M I 口不 支 持 类 型 (C P C IM 、TP或 U P )进行 相 应 处 理 。I 议提 供 了一种 T E ,它通 过 CC包指 出网络包 错误 , 因此将 LT 7A的 TE D等 P协 XR R X9 1 XR引 高效 、不 可靠和 无连 接 的传输 方式 。本 系统 不支 持对 I 包 的分 片 脚 直接 接低 电平 置为无 效 。 P 和重 组 。地址 解析 协议 A P实现 I R P地址 到 M C 址 的动态 转换 。 A地 IM CP协 议定 义 了一套 差错 报 文和 控制 报文 ,在 该 系统用 于 测试 网
基于NI实时控制器的六自由度平台测控系统设计与实现
基于NI实时控制器的六自由度平台测控系统设计与实现王效亮;张芳;曾宪科;栾婷;陈成峰【摘要】六自由度平台测控系统是六自由度平台的电气控制部分,它通过对六路液压缸的实时闭环控制,实现对平台位姿的控制;该测控系统采用NI的计算机,配置多种类型的PXI板卡,实现了对平台的电压、电流、数字IO、CAN总线等多种接口类型的测量和控制,满足了可靠性需求;采用了典型的上下位机控制,分别进行实时计算与任务管理,解决了实时性的控制需求;采用NI的虚拟仪器Labview开发测控软件,完成实时计算平台的正解与反解模块,作动器闭环控制等功能,增强系统的功能和灵活性;目前六自由度平台测控系统的硬件部分和软件部分都已经通过了调试,对系统进行了正弦运动和暂态特性测试,实验结果表明,运行速度快,满足了平台的控制要求.【期刊名称】《计算机测量与控制》【年(卷),期】2019(027)002【总页数】6页(P24-28,33)【关键词】六自由度平台;软件;SIT仿真模型【作者】王效亮;张芳;曾宪科;栾婷;陈成峰【作者单位】北京精密机电控制设备研究所,北京 100081;北京精密机电控制设备研究所,北京 100081;北京精密机电控制设备研究所,北京 100081;北京精密机电控制设备研究所,北京 100081;北京精密机电控制设备研究所,北京 100081【正文语种】中文【中图分类】TP273+.50 引言六自由度平台是一种模拟航天器空间运动姿态的模拟器,在其行程范围内可以模拟任意空间运动。
六自由度是平台具有六个自由运动的维度,即纵向、升降、横向、俯仰、横滚、偏航[1]。
通过对6个液压作动器的精确控制和解藕算法,实现对平台的6个自由度的位姿控制。
其系统示意图如图1所示。
图1 六自由度平台示意图六自由度运动平台可以实现对既定的轨迹的跟踪,作为运动仿真平台有着广泛的应用:1)可以作为航空飞行模拟器;2)可以作为机器人的模拟运动机构;3)在娱乐界可以作为体感模拟娱乐机;4)用作飞机、船舶、潜艇、航天器等运动载体中相关仪器设备的试验。
TCP_IP嵌入式单片机网络智能监控系统的开发与实现

TCP/IP嵌入式单片机网络智能监控系统的开发与实现发布时间:2021-04-02T14:12:28.370Z 来源:《科学与技术》2020年第31期作者:伍思源吴杏思黎东生龚坤松[导读] 在电子信息技术快速发展的过程中,对网络的各资源进行监控的技术也在逐渐的提高,伍思源吴杏思黎东生龚坤松广东石油化工学院广东茂名 525000摘要:在电子信息技术快速发展的过程中,对网络的各资源进行监控的技术也在逐渐的提高,以期能够通过自动化处理实现远程监控、访问以及数据传输工作。
鉴于此,本文主要对TCP/IP协议下,嵌入式单片机网络智能监控系统的开发内容进行了有关分析,确保实现数据信息的自动化监控处理,以供参考。
关键词:网络智能监控系统;嵌入式单片机;TCP/IP;系统开发在TCP/IP协议下,嵌入式单片机完成网络连接、信息数据传输,能够很好的抵抗外界磁场干扰,同时网络通信过程中能够确保通信故障、传输中断可以实现自动修复。
嵌入式单片机和网络用户的PC客户端连接,以此实现对网络信息的监控和传输。
1.网络和嵌入式单片机连接方式的确定网络和嵌入式单片机进行连接时,主要使用32位高档单片机+RTOS、网关+专用网、32位嵌入式微处理器+TCP/IP协议栈等通信方式,通过全面的考虑,确定的连接方式为32位ARMRTL8019AS微控制器+TCP/IP网络协议,以此建立嵌入式单片机网络智能监控系统。
确定的这一网络连接方式,与其他的系统连接方式相比,能够使专门使用的网络布线得到优化,数据处理软件的安装流程得以简化,系统开发的成本得到节省,同时还能够保证有多个嵌入式系统进行数据传输、网络连接。
该连接方式是32位ARM微控制器控制CSMA/CD协议局域网,进而达到嵌入式单片机和网络客户端通信的目的。
2.客户端和TCP/IP网络服务器之间的数据传输在TCP/IP协议下开发的网络监控系统,一般都是1对多、1对1的通信模式,PC上位机、ARM嵌入式微处理器等设备主要通过以太网进行连接。
lwip原理

lwip原理lwip原理是指轻量级IP协议栈(Lightweight IP),是一种适用于嵌入式系统的TCP/IP协议栈。
本文将介绍lwip原理的基本概念、工作流程和应用场景。
一、基本概念lwip原理基于TCP/IP协议栈,是一种开源的网络协议栈。
它具有轻量级、高效性和可移植性的特点,适用于嵌入式系统的资源有限环境。
lwip原理提供了TCP/IP协议栈中的网络层和传输层功能,支持IP、ICMP、UDP和TCP等协议。
二、工作流程lwip原理的工作流程包括网络接口驱动、协议栈处理和应用程序接口。
1. 网络接口驱动网络接口驱动负责与硬件设备进行通信,包括数据的发送和接收。
它提供了与硬件设备的接口函数,通过这些函数将数据传输到网络中或接收网络中的数据。
2. 协议栈处理协议栈处理是lwip原理的核心部分,它包括网络层和传输层的处理。
网络层处理主要负责IP数据包的路由和转发,通过路由表确定数据包的下一跳地址。
传输层处理主要负责数据的可靠传输,包括UDP和TCP协议的处理。
在网络层和传输层之间,lwip原理使用了一个缓冲区来存储数据包。
当数据包到达网络层时,lwip原理会根据目的地址查询路由表,确定数据包的下一跳地址,并将数据包传递给传输层进行处理。
在传输层,lwip原理根据协议类型选择相应的协议处理函数进行处理,如UDP协议或TCP协议。
3. 应用程序接口应用程序接口是lwip原理与应用程序之间的接口,应用程序可以通过这个接口进行网络通信。
lwip原理提供了一系列的API函数,应用程序可以调用这些函数来发送和接收数据。
通过应用程序接口,应用程序可以实现各种网络应用,如Web服务器、FTP服务器等。
三、应用场景lwip原理适用于嵌入式系统中的网络通信应用。
它具有资源占用少、效率高的特点,适用于资源有限的嵌入式系统。
以下是lwip原理的一些应用场景:1. 物联网设备随着物联网的发展,越来越多的设备需要进行网络通信。
基于NI实时控制器的六自由度平台测控系统设计与实现

基于 NI实时控制器的六自由度平台测控系统设计与实现摘要:六自由度平台作为一种全新的模拟器,用于航天空间运动姿态方面的模拟和规划,在六自由度平台的行程范围内,可以凭借其强大的功能去重新演绎各种空间运动,有着六种自由运动的维度,通过对六个液压作用气的精确控制和解耦算法,可以实现不同自由度的位子控制。
而本文将着重分析依托NI虚拟器基础上的六自由度平台测控系统,了解该系统运行的可靠性和安全性。
以通用计算机作为核心,在硬件平台基础上,由用户设计定义,具有仿真面板,有测试软件实现测试功能的一种全新计算机仪器系统,也有着强大的功能优势。
关键词:NI实时控制器;六自由度;系统设计前言:六自由度并联运动平台有着结构稳定、效率高且承载能力大等多方面的特点,兴起以来逐渐广泛地应用到如汽车、飞机等一些运动模拟实验设备,也取得了十分理想的成果。
在六自由度运动平台测控系统中,需要积极满足其高时效性和精确度,更要具备极强的图形图像交互功能。
而基于NItime的六自由度运动进程平台测控系统可满足六自由度运动平台实时测控的高要求[1]。
1.基于NI实时控制器的六自由度平台概述及系统结构1.概述六自由度运动平台可以实现对于原有轨迹的在线跟踪和监测,作为一种可以为航空飞行提供飞行模拟或是运动人模拟的机构,在应用到航空航天领域的同时,也能够运用在人们的日常生活中,作为一种娱乐体感游戏的形式出现,有着强大的功能,而本文依托NItime虚拟器分析六自由度运动平台的控制策略,能够缓解以往可靠性、时效性不高等控制问题。
以通用计算机作为核心的应届平台上,可以由用户自定义,且有着以下几点优势,首先使用了基于NItime虚拟仪器后,能够灵活配置各类关卡,增加了硬件的灵活性与多样性。
其次,选择了Lab view开发软件,能够简化传统的软件研发方式,Lab view作为一种新型的图形化编程工具,也是所见即所得的可视化工具,建立了人机界面后能够提供大量的控制对象内容,有利于图形化编程语言的落实。
嵌入式系统TCPIP网络解决方案资料
嵌入式系统TCP/IP网络解决方案嵌入式系统TCP/IP网络解决方案梁志明(微02)孔凡志(微02)甘珏瑜摘要:以单片机为核心的嵌入式系统在TCP/IP网络中的数据传送技术,远程监控、数据传送方面的应用,提供一种具体的实现方法。
关键字:嵌入式系统单片机 TCP/IP一、综述随着互联网应用的日益普及,以单片机应用系统为中心的小型嵌入式设备正成为当今电子界的热门话题。
本课题研究主要研究嵌入TCP/IP协议的单片机在网络通信中的数据传输技术。
包括实现TCP/IP链路层中的直接链路数据传输,网络层中的IP协议、ARP地址解析协议,传输层的TCP传输控制协议、UDP用户数据报协议,以及应用层的HTTP、TELNET等网络协议。
这种嵌入了TCP/IP协议的单片机系统,为现有的互联网提供了一种价格低廉、硬件简单、相对完善的网络接入方案,在实际应用中更会体现传输速度快、使用方便等优点,并且有着广泛的应用前景,特别是数据采集、数据传输领域。
二、硬件设计硬件设计上采用8位的单片机系统配以太网接口芯片来完成以太网的网络通讯。
考虑到8位单片机的处理能力有限,以太网接口芯片也亦采用10M的接口芯片。
设计中采用了Topstar公司的ISA口的10M网卡TE-2500B,芯片采用Realtek公司的RTL8019AS芯片。
该芯片可以工作在8位总线模式下。
单片机采用了Winbond公司的W78E58B,该芯片支持32K 的程序代码,具有3个计数器和256字节的内部RAM。
单片机使用串行口与上位机通讯,上位机通过终端向单片机发送命令或者接受单片机处理后的数据。
上位机与单片机间使用MAX232转换电平。
因为单片机需要处理大量的以太网数据报,所以大容量的RAM必不可少,设计中使用了HM62256作为单片机的扩展RAM,其大小为32K。
总线连接上也留出地址线A15作为网卡地址选择。
完成的设计原理图见附录,现在对部分电路作详细介绍。
1.单片机部分电路为扩展的数据存储器模式,单片机的工作频率为22.1184MHz,P0和P2端口用作数据及地址总线,P3.0(RXD)和P3.1(TXD)用作串行通讯,P3.2(/INT0)用作网卡的中断IRQ,P3.4用作网卡的冷复位RESET,P3.3和P3.5用作I2C总线的SDA和SCL,扩展的32K外部RAM(62256)使用地址(0x0000 - 0x7FFF)。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
c o mmu n i c a t i o n b a s e d o n e mb e d d e d T CP / I P p r o t o c o l s t a c k b e t we e n c o o r d i n a t i o n l a y e r a n d mo n i t o r w o r k s t a t i o n wa s e mp h a —
侯 耀, 李声晋 , 卢 刚, 周 勇
( 西 北 工业 大 学 , 陕西西安 7 1 0 0 7 2 ) 摘 要: 设 计 了 六 自 由度 ( 6 - D O F ) 平 台的控制系统 , 采用分 布式控制架 构和分 层化设计 思想 , 将 整 个 系 统 划 分
为协调层 与驱动层并进行测试分析 。介绍 了系统各功 能层 的模块 化软硬 件设计 , 重点 实现 了协 调层和监 控工作 站
之间的基于嵌入式 T C P / I P协议 栈 的 工业 以太 网通 讯 。测 试 结 果 表 明协 调 层 和 监 控 工 作 站 之 间 通 讯 正 常 , 满 足 系 统 设计要求 。 关键词 : 六 自由度 平 台 ; 嵌入式 T C P / I P协 议 栈 ; 工 业 以太 网通 讯 中 图分 类 号 : T M3 8 3 . 4 文 献标 识 码 : A 文章 编 号 : 1 0 0 4 - 7 0 1 8 ( 2 0 1 3 ) 0 5 — 0 0 6 2 - 0 6
a r c h i t e c t u r e a nd l a y e r e d c ha n g e d e s i g n t h o u g h t . The s y s t e m wa s d i v i d e d i n t o c o o r di n a t i o n l a y e r a n d d iv r e l a y e r a n d t e s t e d. Mo d u l a r h a r d wa r e a n d s o f t wa r e d e s i g n o f f un c t i o n a l l a y e r s o f s y s t e m we r e i n t r o d u c e d, me a n wh i l e t h e i n d us t r i a l Et h e r n e t
0 引 言
目前工 程实 际 中广泛 使用 的六 自由度平 台是 英
国工 程师 S t e w a r t 于1 9 6 5年提 出 的 , 称为 S t e w a t机 r 构 。它广 泛应用 于 运 动仿 真 与 模 拟 、 并 联 机 床 和微 细加 工等 领域 。本 文在 总结 了六 自由度平 台的研究 现状 后 , 首先 为其控 制 系统设计 了合 理 的架构 , 其次
s i z e d . T h e t e s t r e s u l t s i n d i c a t e t h a t t h e c o mmu n i c a t i o n b e t we e n c o o r d i n a t i o n l a y e r a n d mo n i t o r wo r k s t a t i o n i s n o r ma l a n d
( N o r t h w e s t e r n P o l y t e c h n i c a l U n i v e r s i t y , X i a n 7 1 0 0 7 2 , C h i n a )
A b s t r a c t : A c o n t r o l s y s t e m f o r 6 - D O F ( s i x d e g r e e s o f f r e e d o m)m o t i o n p l a t o f r m w a s d e s i g n e d u s i n g d i s t i r b u t e d c o n t r o l
6 - DOF Mo t i o n P l a t f o r m Co n t r o l S y s t e m Ba s e d o n Em b e d d e d TCP / I P P r o t o c o l S t a c k
H O U Y a o , L I S h e n g - i f n , L U G Ⅱ , Z HO U y 0
…
…
。
/
驱动
恍
…
…
…
…
…
…
…
…
…
…
一
…
…
…
Hale Waihona Puke _- - ………
…
…
…
…
…
微特电棚 2 0 1 3 年 第 4 l 卷 第 5 期
… 二-… ・ … … … … … … … … … … …
一
基 于嵌入式 . I '
基于嵌入式 T C P / I P协 议 栈 的 六 自 由度 平 台 控 制 系 统
me e t s t h e r e q ui r e me n t o f t h e s ys t e m.
Ke y wo r d s : 6 - DOF mo t i o n p l a t f o m ;e r mb e d d e d TC P / I P p r o t o c o l s t a c k ;i n d u s t r i a l E t h e r n e t c o mmu n i c a t i o n