C2000 CANOPEN 应用范例
伺服电机的canopen协议例程
伺服电机的CANopen协议例程一、什么是CANopen协议1.1 CAN总线介绍CAN(Controller Area Network)总线是一种串行通信协议,最初由德国Bosch公司开发,用于汽车电子系统之间的通信。
CAN总线具有高可靠性、实时性和抗干扰能力强的特点,因此在工业控制、航空航天、机器人等领域得到了广泛应用。
1.2 CANopen协议概述CANopen是基于CAN总线的一种高层通信协议,它定义了在CAN总线上进行设备之间通信的规范。
CANopen协议提供了一套标准的通信对象和服务,使得不同厂家的设备能够方便地进行通信和集成。
CANopen协议广泛应用于工业自动化领域,特别是伺服电机控制系统中。
二、伺服电机的CANopen协议应用2.1 伺服电机控制系统简介伺服电机是一种能够精确控制位置、速度和力矩的电机。
伺服电机控制系统通常由伺服电机、驱动器和控制器组成。
控制器通过发送控制指令给驱动器,驱动器再将指令转换为电机的运动控制信号,从而实现对电机的精确控制。
2.2 CANopen在伺服电机控制系统中的应用CANopen协议在伺服电机控制系统中扮演着重要的角色。
它定义了伺服电机控制系统中各个设备之间的通信方式和数据格式,使得不同厂家的伺服电机、驱动器和控制器能够进行互联互通。
通过CANopen协议,控制器可以向驱动器发送位置、速度、力矩等控制指令,驱动器则将实际的运动状态反馈给控制器,实现闭环控制。
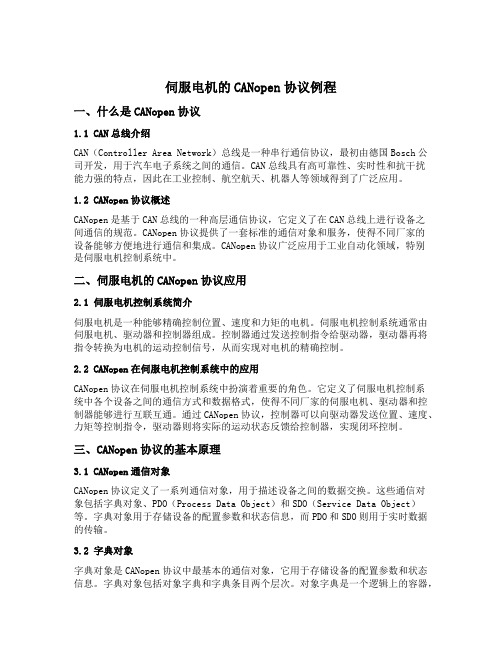
三、CANopen协议的基本原理3.1 CANopen通信对象CANopen协议定义了一系列通信对象,用于描述设备之间的数据交换。
这些通信对象包括字典对象、PDO(Process Data Object)和SDO(Service Data Object)等。
字典对象用于存储设备的配置参数和状态信息,而PDO和SDO则用于实时数据的传输。
3.2 字典对象字典对象是CANopen协议中最基本的通信对象,它用于存储设备的配置参数和状态信息。
CANopen通信

Device Profile CiA Device Profile CiA Device Profile CiA
DSP-401
DSP-404
DSP-XXX
OSI Layer 7 應用層
CiA DS-301 通訊概況
OSI Layer 2 資料連結層
CAN 控制器
CAN 2.0A
OSI Layer 1 物理層
Index Sub
Definition
Value
R/W Size
0x1A00 0 0. Number
PDO SDO SYNC Time Stamp EMCY Boot-up NMT
初始化 ○
预运转
○ ○ ○ ○
○
(15) 自动进入重置应用状态
(16) 自动进入重置通讯状态
A: NMT
B: Node Guard
C: SDO
D: Emergency
E: PDO
F: Boot-up
运转
停止
○
○
○
○
○
○
○
3
C2000 之 CANopen 通讯简介
(1) 初始化
(15) 重置應用
(16) 重置通訊
(9) (10)
( 11 )
D
(3)
(4) (5)
(6) 運 轉A B C D
(7) 停止 AB
(8)
(1) 开启电源后,自动进入初始状态 (2) 自动进入预运转状态 (3) (6)启动远程节点 (4) (7) 进入预运转状态 (5) (8) 停止远程节点 (9) (10) (11) 重置节点 (12) (13) (14)重置通讯
型态数目
Cyclic
台达新推出内建CANOpen主站的C2000变频器

梯起重等行业 。
在 工控 领 域 里 ,两 台机 器 以 上 的 变 频器 应 用 ,必须 以 P C 系统 控 制 核 心 , L为 来 满 足逻 辑 演 算 、过 程 控 制 、 计 数 、 计 时 等 复杂 控 制 。 台达 C 0 0系 列 一 改 变 20
随着低 压变频器 市场 的竞争加 剧 , 机械行业用户不仅要求产品具有速度 同
应对 。
机床操作和编程提供更多便利。该纵切
机 还 有各 种 有 用 的 选 项 , 角度 动力 头 、 如 高速 钻 铣 主 轴 和 有 德 马 吉 专 利 的 直 驱 式 旋 风 铣头 。 驱 式 旋风 铣 是 D G 发 的最 直 M开 新 技 术 。 若在 S r n 2 ln a p i t 0 8 i e r纵 切 机 使 用 直 驱 式 旋 风 铣 头 加 工螺 纹 ,表 面 粗 糙度 可 以 达 到 O 1 u m .2 。 S r n 0 8 1 na 可 以提 高 生产 p i t 2— e r i 效率 ,降低 单件 成 本 ,尤 其适 用 于 汽 车 、 液 压 、气 动 元 件 、 电子 和 医 疗 行 业 。
步 的 功 能 , 同 时 也 要 达 到位 置 同 步 的控 制 。 为 满 足用 户对 变频 器 同 步控 制 的 需 求 , 台达 C 0 0系 列 变 频 器 上 搭 载 了 同 20
频器 仅为 纯粹 驱动 的传 统角 色 , 内建 PC L 程序容量达 1 t p 0 K s e ,程序扫描时 问大幅缩短 ,新增多种 高阶应用指 令,
搭配 网络 系 统 可 达 成 分 布 式控 制 与独 立 操 作 等 系 统 功 能 , 并 符 合 CAN0 e P n
D 4 2 范 ,让 C 0 0 动器 整 合 P C S0 规 20 驱 L 可
C2000变频器CAN总线操作流程
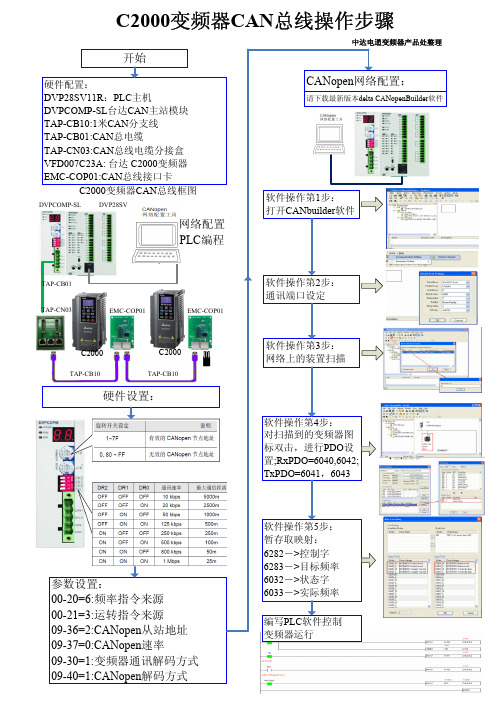
软件操作第5步: 暂存取映射: 6282->控制字 6283->目标频率 6032->状态字 6033->实际频率 编写PLC软件控制 变频器运行
C2000变频器CAN总线操作步骤
中达电通变频器产品处整理
开始
硬件配置: DVP28SV11R:PLC主机 DVPCOMP-SL台达CAN主站模块 TAP-CB10:1米CAN分支线 TAP-CB01:CAN总电缆 TAP-CN03:CAN总线电缆分接盒 VFD007C23A: 台达 C2000变频器 EMC-COP01:CAN总线接口卡 C2000变频器CAN总线框图
C2000
TAP-CB10
软件操作第3步: 网络上的装置扫描
硬件设置:
软件操作第4步: 对扫描到的变频器图 标双击,进行PDO设 置;RxPDO=6040,6042; TxPDO=6041,6043
参数设置: 00-20=6:频率指令来源 00-21=3:运转指令来源 09-36=2:CANopen从站地址 09-37=0:CANopen速率 09-30=1:变频器通讯解码方式 09-40=1:CANopen解码方式
DVPCOMP-SL DVP28SV
CANopen网络配置:
请下载最新版本delta CANopenBuilder软件
软件操作第1步: 打开CANbuilder操作第2步: 通讯端口设定
EMC-COP01 EMC-COP01
TAP-CN03
C2000
TAP-CB10
CANopen绝对值编码器的实际应用

1).可以多主方式工作,网络上任意一个节点均可以在任意时刻主动地向网络上的其 他节点发送信息,而不分主从,通信方式灵活。
2).网络上的节点可分成不同的优先级,可以满足不同的实时要求。
3).采用非破坏性位仲裁总线结构机制,当两个节点同时向网络上传送信息时,优 先级低的 节点主动停止数据发送,而优先级高的节点可不受影响地继续传送数据。
图3-1 预定义连接集ID
Node-ID由系统集成商定义。Node-ID范围是1~127(0不允许被使用)。 如下表格CANopen预定义主/从连接集CAN标识符分配表。Байду номын сангаас
我们读取到一组编码器数据是《0x181 0x30 0x1F 0x00 0x00》,我们应该如何 理解呢?首先,“0x”只是一个符号,它代表了紧跟着的数据是十六进制的(等同于 在数据后面直接标“H”,上述表达式也可以表述为 《181H 30H 1FH 00H 00H》),“181”我们查看上表后发现,它包含在PDO1 (发送)里面,它代表了是由编码器发出的过程数据对象,表上显示是“181H~1FFH”, 这是因为COB-ID包含了节点号信息,地址1对应着181H,地址2对应了182H,以此类 推,最大127个节点。“0x30 0x1F 0x00 0x00”就代表了数据内容,在CAN协议内, 帧数据是低位在前,高位在后的。所以上述数据直接读取后得出编码器送出1F30H, 这就代表了编码器的当前位置值。
功能:主要用于主节点对从节点的参数配置。用来在设备之间传输大 的低优先级数据,典型的是来配置CANopen网络上的设备。
通讯方式:客户机/服务器 它用于访问对象字典的入口。对CANopen对象进行读写。 读/写操作一般由客户端初始化,由服务器服务。
C2000使用手册

TMS320C2000系列DSP寄存器及初始化TMS320LF240X系列DSP使用时,在掌握了其工作原理和过程之后,就要熟练使用DSP自带的一些资源如:IO口、DSRM、SRAM、EVA、,EVB、SCI、SPI、ADC和WD等等;对这些资源的使用很重要的一点就是对其合理配置和初始化,初始化的关键就是对其相关寄存器的设置,设置寄存器必须了解各位的含义,记住每位的含义是不大现实的;为此,我们专门设计了DSP初始化子程序,注明每个模块所用到的寄存器以及每位的含义,以方便设计。
=================================================DSP系统初始化=================================================ARB---辅助寄存器指针缓冲器:当ARP被加载到ST0,除了使用LST指令外,原有的ARP值被复制到ARB中当通过LST#1指令加载ARB时,也把相同的ARB值复制到ARPARP---辅助寄存器指针:ARP选择间接寻址时当前的辅助寄存器AR当ARP被加载时,原有的ARP值被复制到ARB 寄存器中在间接寻址时,ARP可由存储器相关指令改变,也可由LARP,MAR,和LST指令改变当执行LST#1指令时,ARP也可加载每ARB相同的值C---- 进位位:此位在加法结果产生进位时被置为1,或在减法结果产生借位时被清0否则,除了执行带有16 位移位的ADD或SUB指令外,C在加法后被清除或在减法后被设置在ADD或USB指令时,ADD仅可对进位位进行置位而SUB仅可对进位位进行清除,而不会对进位位产生其他影响移1位和循环指令也可影响进位位C,以及SETC、CLRC和LST指令也可影响C条件转移、调用和返回指令可以根据C的状态进行执行复位时C 被置1CNF---片内DARAM配置位:若CNF=0,可配置的双口RAM区被映射到数据存储空间若CNF=I,可配置的双口RAM 区被映射到程序存储空间CNF位可通过SETC CNF,CLRC CNF和LST指令修改R/S/复位时CNF置为0 DP----数据存储器页指针:9位的DP寄存器与一个指令字的低七位一起形成一个16位的直接寻址地址INTM---中断模式位:当INTM被置为0时,所有的未屏蔽中断使能当它被置1,所有可屏蔽中断禁止OV----溢出标志位:该位保存一个被锁存的值,用以指示CALU中是否有溢出发生一旦发生溢出,OV位保持为1直到下列条件中的一个发生时才能被清除OVM---溢出方式位:当OVM=0时,累加器中结果正常溢出当OVM=1时,根据遇到溢出的情况,累加器被设置为它的最大正值或负值SETC指令和CLRC指令分别对该位进行置位和复位PM----乘积移位方式:若PM=00,乘法器的32位乘积结果不移位直接装入CALU若PM=01,PREG输出左移1位后装入CALU,最低位LSB以0填充若PM=10,PREG输出左移4位后装入CALU,最低位LSB以0填充若PM=11,时PREG输出进行符号扩展右移六位SXM----符号扩展方式位:当SXM=1时,数据通过定标移位器传送到累加器时将产生符号扩展SXM=0将抑制符号扩展SXM位对某些指令没有影响TC---- 测试/控制标志位:在下述情况之一,TC位被置1:由BIT或BITT指令测试的位为1当利用NORM指令测试时,累加器的两个最高有效位"异或"功能为真条件转移、调用和返回指令可根据TC位的条件来执行BIT、BITT、CMPR、LST和NORM指令影响TC位XF---- XF引脚状态位:该位决定XF引脚的状态SETCXF指令可对位XF进行置位,而CLRCXF指令可对其进行清0复位时XF置1SCSR1--系统控制和状态寄存器1---地址7018HD15---保留位D14---CLKSRC。
canopen应用案例

canopen应用案例
CanOpen是CAN总线上的一种高级通信协议,广泛应用于工业自动化领域。
下面我们将介绍几个CanOpen应用案例:
1. 焊接设备控制系统
该控制系统使用CanOpen协议实现了所有焊接设备的自动化控制。
每个焊接设备都通过CAN总线连接到一个CanOpen节点,节点之间可以实现实时数据交换。
通过CanOpen协议规定的数据类型、对象字典和服务,可以实现远程节点的配置、控制和诊断。
2. 电动汽车电池管理系统
电动汽车电池管理系统需要对车载电池进行实时监测和控制,以保证电池的安全和性能。
该系统使用CanOpen协议实现了电池管理单元和控制器之间的通信,可以实时获取电池的电压、温度、电量等参数,并根据控制器的指令进行充放电控制。
3. 工业机器人控制系统
工业机器人控制系统需要对机器人的运动轨迹、速度、力度等参数进行实时控制。
该控制系统使用CanOpen协议实现了机器人控制器和各个关节的通信。
通过CanOpen协议规定的PDO和SDO数据传输方式,可以实现高速、实时的数据传输。
4. 液压系统控制
液压系统控制需要对液压泵、电磁阀、油温传感器等设备进行精确控制。
该控制系统使用CanOpen协议实现了液压控制器和各个液压设备的通信。
通过CanOpen协议规定的服务和PDO数据传输方式,可
以实现实时的控制和反馈。
canopen eds 例子

canopen eds 例子
CANopen是一种基于CAN总线的高级通信协议,用于工业控制
系统中的设备之间的通信。
EDS(Electronic Data Sheet)是CANopen设备描述文件的一种格式,它描述了CANopen设备的通信
参数、对象字典、功能码等信息。
下面我会举一个简单的CANopen EDS的例子来帮助你理解。
假设我们有一个简单的CANopen设备,比如一个温度传感器。
它的EDS文件可能包含以下信息:
1. 设备的标识信息,比如制造商、设备类型等。
2. 通信参数,比如设备的节点ID、波特率等。
3. 对象字典,描述了设备支持的各种数据对象,比如温度数值、设备状态等。
4. PDO(Process Data Object)映射,描述了设备支持的PDO
通信方式,即实时数据的传输方式。
举个简单的例子,假设温度传感器的EDS文件中包含了一个温
度数据对象,它的索引是0x6200,数据类型是16位整数,表示温
度值。
这个EDS文件还会定义这个对象的访问权限、单位等信息。
另外,EDS文件还包含了设备支持的各种功能码,比如NMT(网
络管理)、SDO(服务数据对象)等,以及它们的参数和使用方法。
总的来说,一个CANopen EDS文件包含了设备的详细描述信息,使得CANopen主站可以准确地与设备进行通信和控制。
希望这个例
子能帮助你更好地理解CANopen EDS文件的作用和内容。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
应用范例:通过DVPCOPM-SL(CANOPEN主站)控制C2000变频器¢控制要求当X0=ON 时,启动变频器,使其以40Hz 的频率正方向运转;当X1=ON 时,变频器停止输出,并设置目标频率为0Hz。
¢DVPCOPM-SL和C2000变频器硬件连接示意图产品名称产品说明DVPCOPM-SL 台达CANOPEN主站模块VFD-C 台达C2000变频器EMC-COP01 C2000变频器CANOPEN通讯卡TAP-CB01 标准CANOPEN总线主干线电缆TAP-CB03 标准CANOPEN总线分支线电缆TAP-CN03 CANOPEN总线电缆分接盒¢C2000 变频器参数设置参数设置值说明00-20 6 频率指令来源由CANOPEN通讯卡控制。
00-21 3 运转指令来源由CANOPEN通讯卡控制09-36 2 C2000变频器CANOPEN地址。
09-37 0 C2000变频器CANOPEN通讯速率选择。
0:1Mbps1: 500Kbps2: 250Kbps3: 125Kbps4: 100 Kbps5: 50Kbps09-30 0 变频器通讯解码方式选择。
0:20XX区域的地址有效。
1: 60XX区域的地址有效。
09-40 0 CANOPEN解码方式选择。
0:由C2000自己定义。
1:CANOPEN标准DS402规范。
09-45 0 C2000主从站模式选择。
0:C2000做CANOPEN从站。
1:C2000做CANOPEN主站。
¢此范例中按照下表分别对DVPCOPM-SL 主站模块、C2000变频器进行设置模块名称节点地址通讯速率DVPCOPM-SL 主站模块01 1M bpsC2000变频器02 1M bps备注:DVPCOPM-SL通讯速率、节点地址及接线可参考DVPCOPM-SL手册。
¢使用CANopenBuilder网络配置工具配置CANOPEN网络Ø EDS文件的添加EDS文件为文字档,用以描述设备的参数信息。
CANopenBuilder软件中导入C2000变频器的EDS后,软件才可以识别及配置C2000变频器。
1. 打开Delta CANopenBuilder 软件,软件界面如下图所示。
2. 在弹出EDS操作对选择『工具(T)』菜单,点选『EDS操作』会弹出EDS操作对话框。
3. 如下图所示,在弹出EDS操作对话框中,点击“下一步”按钮。
4. 如下图所示,点击“浏览”按钮选择EDS的存放路径。
5. 点击上图所示的“浏览”按钮后,选择C2000变频器的EDS后,点击“打开”按钮。
6. 如下图所示,为C2000变频器选择图标。
7. 如下图所示,点击“完成”按钮,完成C2000变频器EDS在CANopenBuilder软件中的导入。
Ø 主从站参数配置1. 打开Delta CANopenBuilder 软件,软件界面如下图所示。
2.选择『设置(S )』菜单,点选『通讯设置』,再选择『系统通道』,弹出“串口设定”界面。
串口设定说明:项目 说明默认值 通讯端口 设置与SV PLC 通讯的计算机串口COM1 通讯地址 设置SV PLC 的通讯地址 01 通讯速度 设置计算机与 SV PLC 的通讯速率 9600 bps数据位 7 校验位设置计算机与 SV PLC 的通讯协议偶校验停止位 1模式设置计算机与SV PLC 的通讯模式ASCII ModeCANopenBuilder组态软件中的通信速度,数据位,校验位,停止位以及模式的选择须与PLC主机设置一致。
设置正确后,点击『确定』按钮,返回主界面。
4. 选择『网络(N)』菜单,点击『在线』指令。
如果与SV 主机的连接正常,则会出现如下图所示画面。
5.按“确定”按钮对CANopen网络进行扫描,正常情况下弹出扫描进度条,如下图所示。
当扫描出需要配置的主站和从站后,点击“OK”按钮。
6. 点击上图所示的“OK”按钮后,CANopen网络中主站和从站的图标都会显示在软件界面上,如下图所示。
Ø 主站参数设置选择『网络(N)』菜单,点击『主站参数』选项,弹出下图所示对话框。
工作模式:选择DVPCOPM-SL模块的工作模式,可选择Master Mode或Slave Mode,本例中为MasterMode 。
同步周期:当从站PDO传输类型为同步传输时,须在此设置同步周期。
本例PDO传输采用异步传输,故可不考虑此参数。
主站heartbeat时间:设定DVPCOPM-SL主站发送心跳报文的周期。
本例中设为200 ms。
设定参数值后,点击“确定”按钮。
Ø 从站设备参数设置1. 双击C2000变频器从站图标,跳出如下图所示对话框。
2. 配置PDO:添加PDO:在“EDS文件提供的PDO”一栏中选择某一PDO,双击该PDO或点击右侧的“添加”按钮,可将选择的PDO添加到“已配置的PDO”中。
删除PDO:在“已配置的PDO”一栏中,选择某一PDO,点击右侧的“删除”按钮,可将选择的PDO从“已配置的PDO”中删除。
PDO映射:在“已配置的PDO”一栏中,选择某一PDO,双击该PDO或点击右侧的“PDO映射”按钮,会弹出“PDO映射…”对话框。
如下图所示,从站设备的所有参数都显示在“EDS提供的参数”一栏内。
选择“EDS提供的参数”一栏中的某一参数,点击按钮可将该参数从“已映射的参数”一栏内删除。
“已映射的参数”一栏中最多可以添加8个字节长度的参数。
备注:C2000变频器只有20XX和21XX区域的地址可以进行PDO映射,其他参数不可以通过PDO映射,但可以通过SDO读写。
C2000变频器20XX区域的地址对应的索引为2020,21XX区域的地址对应的索引为2021。
PDO属性:在“已配置的PDO”一栏中,选择某一PDO,点击右侧的“属性”按钮,会弹出如下所示界面。
在此界面中可设置PDO的COB-ID以及传输类型,及采用异步传输时TxPDO的Event timer。
PDO COB-ID设置规则如下表所示:RXPDO编号COB-ID(HEX) TXPDO编号COB-ID(HEX) RXPDO1 200+从站站号TXPDO1 180+从站站号RXPDO2 300+从站站号TXPDO2 280+从站站号RXPDO3 400+从站站号TXPDO3 380+从站站号RXPDO4 500+从站站号TXPDO4 480+从站站号PDO传输模式说明如下表所示传输类型传输模式说明255 异步模式当RxPDO或TxPDO的数据发生变化时立即上传至总线,主站收到TxPDO的数据或从站收到RxPDO的数据后立即生效。
0 同步非周期对于RxPDO,数据发生变化时立即上传至总线,从站收到RXPDO的数据要等到收到下一个同步消息后有效。
对于TxPDO,数据发生变化时立即上传至总线,主站收到TxPDO数据后立即生效。
PDO传输模式为同步模式时,同步消息有CANOPEN主站周期发送。
1~240 同步周期以同步5为例,每5个同步消息后(同步1则是1个同步消息后),将RxPDO或TxPDO数据传输至总线。
对于RxPDO,从站收到RXPDO的数据要等到收到下一个同步消息后有效。
对于TxPDO,主站收到TxPDO数据后立即生效。
PDO传输模式为同步模式时,同步消息有CANOPEN主站周期发送。
3. 设置“错误控制协议”:在“节点配置”界面中点击“错误控制协议”,进入如下界面。
此范例中,选择Heartbeat 协议,“主站监控超时时间”设为200 ms ,“从站Heartbeat 产生时间”设为100ms 。
设定参数后,点击『确认』按钮后返回“节点配置…”对话框。
错误控制设定对话框中的参数含义见下表。
4. 此范例参数配置RxPDO1的映射参数如下图所示项目 说明备注Guard 时间主站按Guard Time 设定的时间间隔去轮询从站, Node GuardingLife Time Factor Life Time 因子,Life time= Guard time x LifeTime factor 。
如果从站在Life Time 时间内没有被主站轮询到,主站就认为该从站掉线。
当选择“Heartbeat ”后,就不能再选择“Node Guarding ”。
从站Heartbeat 产生时间从站按“从站Heartbeat 产生时间”周期发送Heartbeat 报文给主站。
Heartbeat主站监控超时时间如果主站在“主站监控超时时间”没有收到从站的Heartbeat 报文,主站就认为该从站掉线。
主站监控超时时间要大于从站Heartbeat 产生时间。
节点列表 CANOPEN 网络中配置的所有节点都显示在节点列表内。
无Heartbeat 监控配置此“错误控制设定”的节点可以监控“Heartbeat 监控”栏内配置的节点是否掉线。
“Heartbeat 监控”栏内只能配置一个节点。
'b3将选择的节点添加到“Heartbeat 监控”一栏内;无'b3将选择的节点从“Heartbeat 监控”一栏内删除。
无编辑按钮 选择“Heartbeat 监控”一栏内的某一节点,点击“编辑”按钮可以更改监控时间。
无确认按钮 点击“确认”按钮后返回“节点配置”对话框,“错误控制设定”对话框内设置的参数被保存。
无 取消按钮点击“取消”按钮后返回“节点配置”对话框,“错误控制设定”对话框内设置的参数无效。
无TxPDO1的映射参数如下图所示如下图所示,RxPDO1和TXPDO1的传输类型选择255(异步模式)。
5. 所有参数设置完成后,在“节点配置…”界面中点击“确定”。
Ø 节点列表配置1. 双击“DVPCOPM Master”图标,弹出如图所示的“节点列表配置”对话框。
可以看到左边的列表中有当前可用节点VFD-C Drives,右边有一个空的“节点列表”。
2. 选中VFD-C Drives 从站,点击“>”按钮将该从站加入节点列表。
在下方的输入输出映射表中看到从站的IO 数据对应到SV 主机内的D 寄存器地址。
如下图所示。
3. 确认无误后,点击『确定』按钮,然后将配置下载到DVPCOPM-SL 主站模块内。
下载时,如果 SV 主机处于RUN 模式,会弹出“警告”对话框,如下图所示。
4. 点击『是』按钮,将配置下载至主站模块,确认PLC 处于RUN 模式。
¢ 保存配置数据选择『文件(F )』菜单中『保存(S)』命令,将当前的网络配置保存。
¢ DVPCOPM-SL 主站模块和从站设备的 IO 数据映射 DVPCOPM-SL 主站模块 → C2000变频器DVPCOPM-SL 主站模块寄存器 CANOPEN 总线数据传输从站设备元件装置D6282H C2000变频器命令字高字节D6282LC2000变频器 C2000变频器命令字低字节D6283H C2000变频器频率字高字节D6283L C2000变频器频率字低字节C2000变频器→DVPCOPM-SL 主站模块DVPCOPM-SL主站模块寄存器CANOPEN总线数据传输从站设备元件装置D6032H C2000变频器状态字高字节D6032L C2000变频器状态字低字节D6033H C2000变频器输出频率字高字节D6033L。