航空摄影陀螺稳定平台_许江宁
陀螺稳定平台在影视拍摄中的应用

的 划分 方式 。
按照 陀螺 的种类 划分 ,常见 的有机械 式陀螺 稳定平 台、 光 纤陀螺稳定平 台、微 机 电陀螺 稳定平 台等。早期 的稳定平
0 引 言
近年来 ,大型活动 的电视直播 ,电影中宏大场景的拍摄 , “ 马拉松赛” 公路 自行车赛 ” 帆船 比赛”等长距离、大范 、“ 、“ 围的体 育赛事 ,都需要借助移 动载体对 目标 进行全方位 多角
使 拍 摄视 轴 稳 定 在 空 间坐 标 系 中给 定 的方 向。
限 制较小 ,适合在 摇臂、车载 、船载 、轨 道、悬索等速 度较 慢 ,风 阻较小的场合。为了减 少风 阻对平 台稳定效果 的影 响。 封闭式稳定平 台的框架和摄像 机包裹在一个 类似球体 的密闭 壳体 中 ( 又称为 “ 吊舱”) , 摄像机的尺寸和重量受到一定限制 , 有 的甚 至只能安 装指 定型号 的摄像 机 ,适合直升机 、固定翼 飞机等速度较快 ,风阻较大的场合。
台多采 用挠 性陀螺 ( 机械式陀螺 的一种 ) ,目前主流 的、精度
较 高的是光纤 陀螺稳 定平 台,精度相 对较低 的平 台则采用微
机 电陀螺。
按照陀螺稳定平 台被稳定 轴数 , 可分为单轴 、 双轴、 三轴 、
全 姿态 ( 四轴 ) 稳定平台。 按照陀螺稳定 平台结构形式 可分为开放式 和封闭式稳定
究和应用方面 的差距很 大。 目前 国内从事陀螺稳 定技术研究
摘 要 : 本 文介 绍 了 陀螺 摄 像 稳 定平 台 的 不 同 分 类 方 法 ,
的单位不 少,但有 关其在影视拍摄 中应用研究 的报道却很少。 国内几乎没有相 关的产 品投入 市场 ,因此 国外 厂商通过各种 方式垄断了国内陀螺摄像稳定平 台市场。
航空陀螺仪
航空陀螺仪一、陀螺仪的基本知识陀螺玩具旋转时,能够直立在地上;而且转得愈快,立得也愈稳;即使给它一个冲击,也只是晃动而不会倒下。
陀螺的这种特性可以被利用来做成仪表用来测量飞机的姿态角、航向角和角速度。
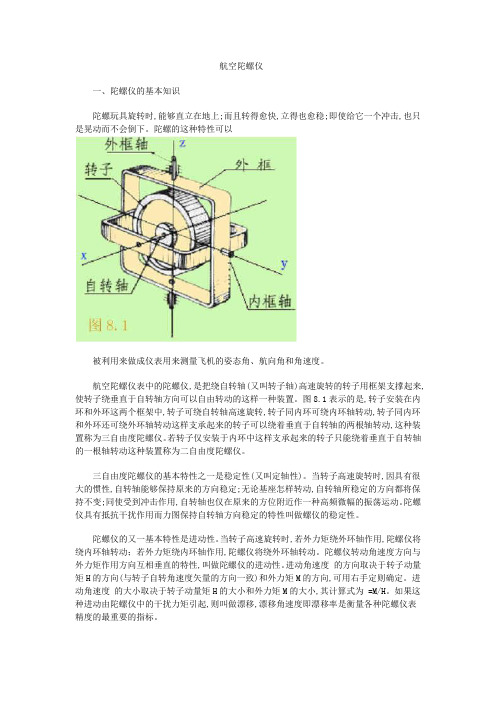
航空陀螺仪表中的陀螺仪,是把绕自转轴(又叫转子轴)高速旋转的转子用框架支撑起来,使转子绕垂直于自转轴方向可以自由转动的这样一种装置。
图8.1表示的是,转子安装在内环和外环这两个框架中,转子可绕自转轴高速旋转,转子同内环可绕内环轴转动,转子同内环和外环还可绕外环轴转动这样支承起来的转子可以绕着垂直于自转轴的两根轴转动,这种装置称为三自由度陀螺仪。
若转子仅安装于内环中这样支承起来的转子只能绕着垂直于自转轴的一根轴转动这种装置称为二自由度陀螺仪。
三自由度陀螺仪的基本特性之一是稳定性(又叫定轴性)。
当转子高速旋转时,因具有很大的惯性,自转轴能够保持原来的方向稳定;无论基座怎样转动,自转轴所稳定的方向都将保持不变;同使受到冲击作用,自转轴也仅在原来的方位附近作一种高频微幅的振荡运动。
陀螺仪具有抵抗干扰作用而力图保持自转轴方向稳定的特性叫做螺仪的稳定性。
陀螺仪的又一基本特性是进动性。
当转子高速旋转时,若外力矩绕外环轴作用,陀螺仪将绕内环轴转动;若外力矩绕内环轴作用,陀螺仪将绕外环轴转动。
陀螺仪转动角速度方向与外力矩作用方向互相垂直的特性,叫做陀螺仪的进动性。
进动角速度的方向取决于转子动量矩H的方向(与转子自转角速度矢量的方向一致)和外力矩M的方向,可用右手定则确定。
进动角速度的大小取决于转子动量矩H的大小和外力矩M的大小,其计算式为 =M/H。
如果这种进动由陀螺仪中的干扰力矩引起,则叫做漂移,漂移角速度即漂移率是衡量各种陀螺仪表精度的最重要的指标。
至于二自由度陀螺仪的特性,就与三自由度陀螺仪不同。
二自由度陀螺仪少了垂直于内环轴和自转轴方向的转动自由度。
这样,当基座绕着这个缺少自由度的轴线转动时,通过内环轴上一对轴承的推动,就强迫陀螺仪跟随基座转动;与此同时,基座作用于内环两端轴承上的推力形成了推力矩将强迫陀螺绕内环轴进动,使自转轴趋于基座转动角速度的方向重合。
5-五亿像素_AMC5100倾斜航摄与实景真三维建模方案

六、上海航遥信息技术有限公司简介
6.2 资质证书与代理
甲级测绘航空摄影资质 乙级摄影测量与遥感资质 Bentley公司CPA授权代理商 上海市高新技术企业 上海市高新成果转换企业 ISO9000质量管理体系认证 信息安全管理体系
一、倾斜航空摄影解决方案—大飞机篇
1.8 AMC5100(AMC580)的精度
一、倾斜航空摄影解决方案—大飞机篇
1.9 AMC5100(AMC580)的业绩
二、倾斜航空摄影解决方案—直升机篇
2.1 AMC850/AMC1036
可安装于各类直升机平台,包括阿古斯塔、小松鼠、 R44、直9等……
二、AMC倾斜数码航摄仪系列
三、倾斜航空摄影解决方案—无人机篇
3.4 ARC524/ARC336/ARC536
ARC524/ARC336已承担执行的倾斜航空摄影任务: 各类文物保护目标点 高校校园 智慧社区 部队场站 拆迁目标 小区域规划 各类目标百十余个 ……
三、倾斜航空摄影解决方案
上海航遥信息技术有限公司 为什么致力于推出系列 倾斜航摄仪产品?
一、倾斜航空摄影解决方案—大飞机篇
1.7 AMC5100(AMC580)的业绩
AMC580累计获取航空影像超过50w张,已承担执行的 倾斜航空摄影任务:
上海市陆家嘴地区 浙江省台州市、西湖区 英国牛津市、斯旺西市 江苏省丹阳市 广东省深圳市 河南省新乡市 湖南省张家界景区、南岳景区、衡阳市 青海省西宁市 陕西省汉中市 ……
角速度陀螺信号测量及标定方法研究开题

毕业设计开题报告
学 生 姓 名:
学 号:
学院、系:
、电子与计算机科学技术
专业:
设 计 题 目:
角速度陀螺信号测量及标定方法研究
指导教师:
2010年 12月 10日
毕业设计开题报告
1.结合毕业设计情况,根据所查阅的文献资料,撰写2000字左右的文献综述:
文献综述
一、本课题的研究背景及意义
[19]陆阳;高精度加速度计采集单元的设计及关键器件的研究[D];哈尔滨工程大学;2009年.
[20]马云峰;MSINS/GPS组合导航系统及其数据融合技术研究[D];东南大学;2006年.
[21]任顺清;冯士伟;马向斌;加速度计的全组合标定方法[J];中国惯性技术学报;2007年06期.
毕业设计开题报告
(4)不确定因子的误差标定
(5)角速度和加速度的精确解算
二、拟采用的研究手段
1.测量角速率和加速度
初步拟定利用科里奥利(Coriolis)加速度来测量角速度,科里奥利效应原理如图1所示。假设某人站在一个旋转平台的中心附近,他相对地面的速度用图1箭头的长度所示。如果移动到平台外缘的某一点,他相对地面的速度会增加,如图1较长的箭头所示。由径向速度引起的切向速度的速率增加,这就是科里奥利加速度。设角速度为w科里奥利加速度的一半,另一般来自径向速度的改变,二者总和为2wv旋转平台必须施加一个大小为2Mwv科里奥利加速度,并且该人将受到大小相等的反作用力。的力来产生。如果人的质量为M,该,平台半径为r,则切向速度为wr,如果以速度v沿径向r移动,将产生一个切向加速度wv,这是陀螺仪通过使用一种类似于人在一个旋转平台移出或移入的谐振质量元件,利用科里奥利效应来测量角速度。
一种陀螺稳定平台自适应模糊-PID复合控制方法

一种陀螺稳定平台自适应模糊-PID复合控制方法朱倚娴;陆源;许江宁;程向红【摘要】机械摩擦、器件工作饱和区等不确定因素会导致陀螺稳定平台系统参数的波动和非线性特性,为解决非线性因素对稳定平台控制系统性能的影响,提出了一种自适应模糊-PID复合控制方法。
引入自适应因子δ实现模糊控制和PID控制的复合,误差较大时增强模糊控制的作用以加快系统响应,误差较小时增强PID 控制的作用以实现无静差调节。
采用自调整量化因子ker(er)、kec(ec)实现基本论域的在线调整,提高了模糊控制器的灵敏度。
仿真结果表明,在干扰冲击和短时常值干扰情况下,自适应模糊-PID复合控制与常规模糊控制相比,抗干扰能力显著增强,平台稳定精度提高0.4'左右。
%System parameters of gyro stabilized platform are unpredictable because of the uncertainty factors such as mechanical friction, the saturation characteristic of the driver module, etc. To suppress the error caused by the nonlinear characteristics, an adaptive fuzzy-PID hybrid control method is proposed. The adaptive factorδis set up to combine fuzzy control and PID control. When the large attitude error of the platform is detected, the effect of fuzzy control is enhanced to decrease the system response time. And the conventional PID control effect is enhanced to eliminate the static error when the attitude error is small. Self-adjusting quantitative factors ker(er) andkec(ec) are proposed to adjust the basic domain of the fuzzy controller online, which improves the sensitivity of the control loop. The simulation results show that, in both cases of pulse and step interference,theadaptive fuzzy-PID hybrid controlcan improve the accuracy of platform attitude about 0.4 arc min and enhance its capability of anti-jamming compared to ordinary fuzzy control.【期刊名称】《中国惯性技术学报》【年(卷),期】2014(000)003【总页数】5页(P317-321)【关键词】陀螺稳定平台;模糊控制;PID;自调整量化因子;复合控制【作者】朱倚娴;陆源;许江宁;程向红【作者单位】东南大学仪器科学与工程学院微惯性仪表与先进导航技术教育部重点实验室,南京 210096;东南大学仪器科学与工程学院微惯性仪表与先进导航技术教育部重点实验室,南京 210096;海军工程大学电气与信息工程学院,武汉430033;东南大学仪器科学与工程学院微惯性仪表与先进导航技术教育部重点实验室,南京 210096【正文语种】中文【中图分类】TP273准确测量地球各点的重力加速度值,对我国的国防建设、经济建设和科学发展有着十分重要的意义。
光学仪器 跟踪、瞄准、光电对抗设备

JT15试验样机的寻北测量精度,使由于测量周期变化造成的寻北误差减小了10倍以上。
图10表3参3(于晓光) V241.552007054891航空摄影陀螺稳定平台=Gyro stabilized platform f or aeri al photography[刊,中]/许江宁(海军工程大学导航工程系.湖北,武汉(430033)),朱涛//仪器仪表学报.―2007,28(5).―914917采用三个二自由度挠性陀螺仪构成陀螺稳定平台,实现中等精度的电控罗经、高精度的方位水平仪和稳定平台等功能。
陀螺稳定平台对飞机飞行条件依赖较小,能承受30g冲击加速度,正常启动时间10min,水平精度0.2!,方位漂移精度0.2!/h,方位任意预置并连续显示,其整体技术性能优于LEICA公司PAV30型陀螺稳定平台。
图5表1参8(于晓光)V241.622007054892三维空间中的偏振光导航方法=Polar ized light based navigat ion in three dimensional space[刊,中]/卢鸿谦(哈尔滨工业大学控制理论与制导技术研究中心.黑龙江,哈尔滨(150001)),黄显林//光学技术.―2007,33(3).―412415提出了偏振光/GPS/SINS组合导航方法,推导了偏振光辅助测姿原理并进行了仿真验证。
提出了多模块改善能观度的方法。
采用联邦卡尔曼滤波方法实现了组合导航算法,利用Mat lab仿真方式分别对使用单偏振光模块和多偏振光模块的组合导航系统的测姿修正效果和能观度改善效果进行了检验。
结果表明,偏振光辅助测姿方法的引入能够大大改善导航系统的能观度和精度,非平行观测的多偏振光模块可以进一步提高系统性能。
图6参7 (严寒)V448.222007054893小型准直式红外地球模拟器研究=R esear ch on a minia tur e collimating infr ared earth simulator[刊,中]/张国玉(长春理工大学.吉林,长春(130022)),张帆//仪器仪表学报.―2007,28(3).―545549针对卫星同步轨道高度(35786km),采用准直式方案,研制了一种口径为150mm的准直式红外地球模拟器,它能提供17.46!的地球张角,实现了地面上模拟卫星在太空中所看到的地球。
《惯性导航系统》学习指南
学习指南《惯性导航系统》课程包括惯性导航基础、惯性元件、惯性平台、平台式惯导原理、捷联式惯导原理等5个单元的内容.由于本门课程具有:涉及知识面宽,与物理学、工程力学、控制科学、材料学、计算机科学等知识联系紧密;教学内容丰富,数学公式复杂,空间关系抽象,逻辑推理和形象思维要求高的课程特点,导致课程在教学过程易于出现教师难教、学生难学的现象。
为帮助大家学好本门课程,我们给出学习建议,供大家参考。
一、课程前后关系1.前置课程本门课程是电气工程及其自动化和自动化等专业的专业基础课,根据专业人才培养方案和课程自身的知识体系结构,学习本门课程需要具备《物理学》、《理论力学》、《电机学》、《电路原理》、《模拟数字电路》、《自动控制原理》和《陀螺原理》等相关课程的专门知识,这些知识是学好本门课程的重要基础。
2.后续课程本门课程的后续课程主要有《飞行控制系统》、《组合导航系统》、《机载航电设备》等.学好本门课程可以为上述课程的学习打下良好的学习基础。
二、主讲教材与参考教材1.主讲教材本门课程的主讲教材是2008年9月国防工业出版社出版的空军航空机务体系统编教材《惯性导航》。
该教材从惯性导航基础、惯性元件、惯性平台、平台式惯导原理、捷联式惯导原理五个知识模块,系统阐述了惯性导航基本概念、基本原理和基本结构.教材针对惯性导航理论抽象、复杂的特点,特别加强了空间概念、坐标系转换和惯导几何位置关系的物理解释,惯性导航方程、力学编排方程、误差方程、对准方程等复杂公式推导过程的物理本质分析,以便于读者加深对惯性导航内涵和实质的理解。
2.参考教材本门课程为广大读者提供了大量辅助参考资料,参考资料包括参考教材、学位论文、学术论文三个类别。
这些参考资料有助于读者全面了解惯性导航及相关领域的知识结构, 惯性导航理论和技术的发展方向。
以下给出的是主要参考教材清单.(1)《惯性导航与组合导航》,张宗麟,北京,航空工业出版社,2000年8月(2)《惯性导航》,秦永元,北京,科学出版社,2006年5月(3)《捷联惯性导航技术》(英)David H.Titterton,北京,国防工业出版社,2007年12月(4)《惯性器件与惯性导航系统》,邓志红,北京,科学出版社2012年6 月(5)《光纤陀螺仪》,(法)Hrtve G。
光纤陀螺仪的发展及应用

光纤陀螺仪的发展及应用摘要:作为光纤传感器的一种,光纤陀螺仪具有了更多的优点,它具有结构紧凑,灵敏度高,工作可靠等等优点,就是因为这些优点,光纤陀螺仪在很多的领域已经完全取代了机械式的传统的陀螺仪,成为现代导航仪器中的关键部件。
本文主要介绍了光纤陀螺仪的工作原理,特点,分类,应用及发展现状。
关键词:光纤传感器,陀螺仪,光纤陀螺仪,导航系统。
Abstract:As one of the fiber sensors,FOG has more advantages.It has a compact structure,high sensitivity,high reliability and so on.Just because of these advantages,FOG nearly replace all the traditional mechanical gyroscopes and become the critical component of modern navigational instruments.This paper introduces the working principle,the features,sorts,usage and statues of development of the FOG.Key words:fiber sensors,gyroscopes,FOG,navigation system.引言:现代陀螺仪是一种能够精确地确定运动物体的方位的仪器,它是现代航空,航海,航天和国防工业中广泛使用的一种惯性导航仪器,它的发展对一个国家的工业,国防和其它高科技的发展具有十分重要的战略意义。
传统的惯性陀螺仪主要是指机械式的陀螺仪,机械式的陀螺仪对工艺结构的要求很高,结构复杂,它的精度受到了很多方面的制约。
自从上个世纪七十年代以来,现代陀螺仪的发展已经进入了一个全新的阶段。