一种稳定平台中陀螺漂移滤波算法的设计与实现
陀螺仪卡尔曼滤波算法
陀螺仪卡尔曼滤波算法1. 引言陀螺仪是一种用于测量角速度的传感器,广泛应用于惯性导航、无人机控制、姿态估计等领域。
然而,由于传感器噪声和误差的存在,陀螺仪输出的数据往往不够稳定和准确。
为了解决这个问题,人们提出了许多滤波算法,其中最常用且效果良好的就是卡尔曼滤波算法。
本文将介绍陀螺仪卡尔曼滤波算法的原理、实现过程以及应用场景,并对其优缺点进行讨论。
2. 陀螺仪陀螺仪是一种基于角动量守恒原理工作的传感器。
它通常由一个旋转部件和一个测量部件组成。
旋转部件可以是一个旋转的轴或者一个旋转的盘片,当外界施加力矩时,旋转部件会发生相应的转动。
测量部件通过测量旋转部件的角速度来获取外界施加力矩的信息。
陀螺仪输出的数据通常是角速度,单位为弧度/秒。
然而,由于制造工艺和环境因素的限制,陀螺仪的输出往往存在噪声和误差。
这些噪声和误差会对应用场景中的姿态估计、运动控制等任务产生不利影响。
3. 卡尔曼滤波算法卡尔曼滤波算法是一种递归滤波算法,通过利用系统模型和观测数据,对状态进行估计和预测。
它在估计过程中综合考虑了系统模型的预测值和观测数据的测量值,并通过最小均方误差准则来优化估计结果。
陀螺仪卡尔曼滤波算法主要包括以下几个步骤:3.1 状态空间模型首先,需要建立一个状态空间模型来描述陀螺仪系统。
状态空间模型通常由状态方程和观测方程组成。
状态方程描述了系统的演化规律,可以表示为:x(k) = F * x(k-1) + B * u(k-1) + w(k-1)其中,x(k)表示时刻k的系统状态,F是状态转移矩阵,B是控制输入矩阵,u(k)是控制输入,w(k)是过程噪声。
观测方程描述了系统的输出与状态之间的关系,可以表示为:z(k) = H * x(k) + v(k)其中,z(k)表示时刻k的观测值,H是观测矩阵,v(k)是观测噪声。
3.2 初始化在开始滤波之前,需要对滤波器进行初始化。
通常情况下,可以将初始状态和协方差矩阵设置为零向量和单位矩阵。
稳定平台中陀螺漂移自适应实时估计算法_张智永

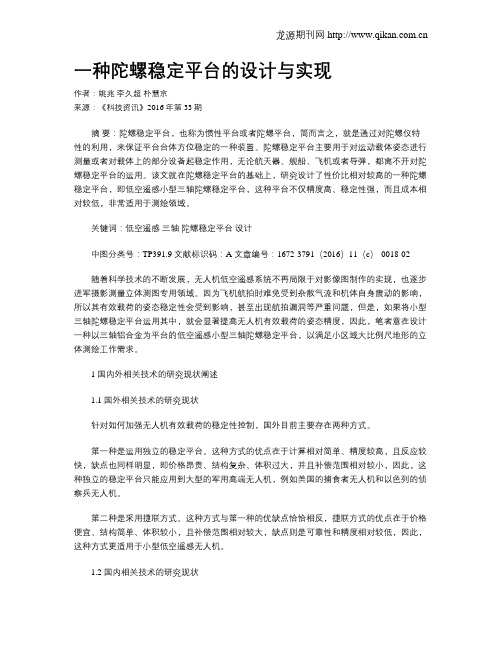
9] 图 2 陀螺稳定平台伺服控制系统结构 [
r o l a t f o r m9 F i . 2 S t r u c t u r e o f s e r v o c o n t r o l s s t e m o f s t a b i l i z e d - - g y p g y
[ ] 3 7 -
, 进行了广泛的研究并取得一定的效
果 。 但就稳定平 台 漂 移 补 偿 而 言 , 还存在如下问 题: 如 低 通 滤 波、 卡尔曼滤 ① 各类信号处理手段, 波、 前向线性预测滤波( F o r w a r d L i n e a r P r e d i c - , 、 小 波 滤 波, 均是抑制陀螺噪声 t i o n F i l t e r F L P) , 的中高频信号 对补偿陀螺常值漂移作用不大 ; ② 从短期来看 , 陀螺常值漂移为固定随机数 , 但长期
。 陀螺作为稳定平台核心测量元件 , 其误
差对平台性能有 很 大 影 响 , 如陀螺常值漂移会造 陀螺相关漂移会 成平台漂移随时 间 呈 线 性 增 长 , 造成平台漂移的随机游走 。 而平台漂移会带来图 像的 扰 动 , 进而造成目标搜索、 捕 获、 跟踪和瞄准 因此必须对陀螺误差进行补偿 。 的困难 , 国内外专家学 者 针 对 陀 螺 误 差 的 分 析 、 建模 和补偿
J u n . 2 5 2 0 1 2V o l . 3 3N o . 6 1 0 4 4 1 0 5 1 - / I S S N 1 0 0 0 6 8 9 3 N 1 1 1 9 2 9 V - C -
稳定平台中陀螺漂移自适应实时估计算法
张智永 * ,周晓尧 ,范大鹏
国防科学技术大学 机电工程与自动化学院 ,湖南 长沙 4 1 0 0 7 3
一种新型陀螺仪滤波算法设计

无论采用传统卡尔曼或是 Sage - Husa 自适应卡尔曼 滤波对陀螺仪数据进行处理,首先都要建立陀螺仪输出数据 的状态方程与观测方程。卡尔曼滤波可分为连续卡尔曼滤波 和离散卡尔曼滤波,对于陀螺仪数据机上处理采用离散卡尔 曼滤波。因此首先给出离散卡尔曼滤波与 Sage - Husa 自
目前对陀螺仪的滤波有三类方案。第一类方案最为简 单,即对陀螺仪数据进行低通滤波或是滑动窗口滤波,低通 滤波的优点是计算量小,缺点是延时较为严重,如果参数设 置不合适,可能造成获取的姿态出现延时,反应“迟钝”。 第二类方法为基于卡尔曼滤波在时间序列模型建模情况下的 滤波算法,即通过对离线陀螺仪数据进行一系列预处理及判 定,然后进行建模滤波。该算法存在的一个缺点就是滤波过 程中的状态噪声与观测噪声是离线分析传感器数据得出的常 值量,手动改变状态噪声与观测噪声能够明显看到滤波效果 的不同。但现实情况是离线数据分析得出的状态噪声与量测 噪声往往只能代表一段时间内陀螺仪噪声的统计特性,在不 同上电时刻或者是不同的时间段,陀螺仪的噪声统计特性都 有可能呈现出不同的变化。使用常值噪声虽然能够简化算法, 达到一定的滤波效果。但是,当运动环境较为恶劣的时候, 有可能会造成滤波效果很弱,甚至发散。若使用卡尔曼滤波 进行数据处理,需要建立数据的状态模型。对于陀螺仪卡尔
industry
李晓东 1 胡少兴 1 任海英 2
1. 北京航空航天大学机械工程及自动化学院;2. 中国船舶工业系统工程研究院 李晓东(1992 -)男,硕士研究生,研究方向:主要从事无人机导航及控制方面研究。
影响力
point
行业关联度
基 金 项 目: 北 京 市 自 然 科 学 基 金 (4162034); 青 海 省 科 技 计 划 项目(2016 - NK - 138)
一种陀螺稳定平台瞄准线漂移的惯性补偿方法

一种陀螺稳定平台瞄准线漂移的惯性补偿方法薛媛元;陈文建;康婷颋;陈颖;张夏疆;杨远成【期刊名称】《应用光学》【年(卷),期】2016(037)002【摘要】针对陀螺稳定平台系统中地球自转引起的瞄准线漂移问题,提出一种基于惯性姿态信息的瞄准线漂移补偿方法.该方法根据惯导系统解算得出的平台地理坐标和姿态信息计算出地球自转角速率在光电稳定平台坐标系上的投影,稳瞄控制单元利用该投影信息自动补偿平台上的速度反馈数据,消除由地球自转造成的瞄准线漂移.试验结果显示,使用该补偿方法后的方位漂移及俯仰漂移分别是1.69 mrad/h 和1.84 mrad/h,远小于不加该补偿方法时的方位漂移6.89 mrad/h及俯仰漂移7.32 mrad/h,证明该方法可有效补偿瞄准线漂移.【总页数】6页(P177-182)【作者】薛媛元;陈文建;康婷颋;陈颖;张夏疆;杨远成【作者单位】西安应用光学研究所,陕西西安710065;西安应用光学研究所,陕西西安710065;西安应用光学研究所,陕西西安710065;西安应用光学研究所,陕西西安710065;西安应用光学研究所,陕西西安710065;西安应用光学研究所,陕西西安710065【正文语种】中文【中图分类】TN206;TP273【相关文献】1.一种扩散硅压力传感器温度补偿方法——漂移电流源外补偿法 [J], 孟令昆;曹兆臣2.一种新颖的瞄准线高精度稳定补偿方法研究 [J], 王惠林;纪明;齐华3.机载光电观瞄系统的瞄准线指向线性运动补偿方法 [J], 闫明;刘栋;王惠林;边赟;刘国栋;高贤娟4.惯性导航系统中陀螺漂移率的复合补偿方法 [J], 滕云鹤5.惯性导航系统陀螺仪斜坡漂移的估计及补偿方法探讨 [J], 蔡开仕;庄良杰因版权原因,仅展示原文概要,查看原文内容请购买。
六轴陀螺仪融合算法和滤波算法

六轴陀螺仪融合算法和滤波算法六轴陀螺仪是一种高精度的传感器,它可以实时测量物体的角速度和角位移,因此在许多应用领域都有广泛的应用。
然而,由于六轴陀螺仪会受到一些外界因素的干扰,因此需要进行融合算法和滤波算法的处理,以提高陀螺仪的精度和稳定性。
下面我们就来看一看六轴陀螺仪融合算法和滤波算法的实现方法。
1. 融合算法六轴陀螺仪同时测量了角速度和角位移,但是这两个参数的测量精度有所不同。
由于角速度的变化速度很快,陀螺仪测量的精度比较高,但角位移的计算则要通过积分来实现,误差积累较快,因此精度较低。
因此,我们需要采用一种融合算法来实现精度更高的角位移测量。
常用的融合算法有卡尔曼滤波算法和姿态解算算法。
1.1 卡尔曼滤波算法卡尔曼滤波算法是一种递归滤波算法,它利用系统的状态和误差的协方差矩阵来计算状态的最优估计值和估计误差。
在六轴陀螺仪中,可以利用卡尔曼滤波算法来对角位移进行融合处理。
具体的实现步骤如下:1. 首先初始化系统的状态和误差矩阵;2. 然后利用六轴陀螺仪的角速度测量值来预测下一时刻的状态值和误差矩阵;3. 接着利用加速度计等其他传感器的数据来进一步校正状态值和误差矩阵,完成融合计算。
利用卡尔曼滤波算法可以实现比较精确的角位移测量,但计算复杂度较高,要求系统能够实时处理大量的数据。
1.2 姿态解算算法姿态解算算法是一种基于向量旋转的解算方法,可以把六轴陀螺仪、加速度计等传感器的测量值转换成实体在空间中的姿态角。
姿态解算算法主要包括基于欧拉角的算法和基于四元数的算法。
其中,基于四元数的算法由于精度高、抗干扰性能好等优点,被广泛应用于飞行器、机器人、遥控设备等领域。
姿态解算算法的实现步骤如下:1. 计算六轴陀螺仪的角速度;2. 利用欧拉公式或四元数公式将角速度转换成旋转矢量;3. 利用加速度计等其他传感器的数据确定重力矢量;4. 利用旋转矢量和重力矢量计算实体在空间中的姿态角。
姿态解算算法的优点是计算速度快、可靠性高,但缺点是对噪声抗干扰能力较弱,需要加入滤波算法进行处理。
一种陀螺稳定平台的设计与实现
一种陀螺稳定平台的设计与实现作者:姚兆李久超朴慧京来源:《科技资讯》2016年第33期摘要:陀螺稳定平台,也称为惯性平台或者陀螺平台,简而言之,就是通过对陀螺仪特性的利用,来保证平台台体方位稳定的一种装置。
陀螺稳定平台主要用于对运动载体姿态进行测量或者对载体上的部分设备起稳定作用,无论航天器、舰船、飞机或者导弹,都离不开对陀螺稳定平台的运用。
该文就在陀螺稳定平台的基础上,研究设计了性价比相对较高的一种陀螺稳定平台,即低空遥感小型三轴陀螺稳定平台,这种平台不仅精度高、稳定性强,而且成本相对较低,非常适用于测绘领域。
关键词:低空遥感三轴陀螺稳定平台设计中图分类号:TP391.9 文献标识码:A 文章编号:1672-3791(2016)11(c)-0018-02随着科学技术的不断发展,无人机低空遥感系统不再局限于对影像图制作的实现,也逐步进军摄影测量立体测图专用领域。
因为飞机航拍时难免受到杂散气流和机体自身震动的影响,所以其有效载荷的姿态稳定性会受到影响,甚至出现航拍漏洞等严重问题,但是,如果将小型三轴陀螺稳定平台运用其中,就会显著提高无人机有效载荷的姿态精度,因此,笔者意在设计一种以三轴铝合金为平台的低空遥感小型三轴陀螺稳定平台,以满足小区域大比例尺地形的立体测绘工作需求。
1 国内外相关技术的研究现状阐述1.1 国外相关技术的研究现状针对如何加强无人机有效载荷的稳定性控制,国外目前主要存在两种方式。
第一种是运用独立的稳定平台。
这种方式的优点在于计算相对简单、精度较高,且反应较快,缺点也同样明显,即价格昂贵、结构复杂、体积过大,并且补偿范围相对较小,因此,这种独立的稳定平台只能应用到大型的军用高端无人机,例如美国的捕食者无人机和以色列的侦察兵无人机。
第二种是采用捷联方式。
这种方式与第一种的优缺点恰恰相反,捷联方式的优点在于价格便宜、结构简单、体积较小,且补偿范围相对较大,缺点则是可靠性和精度相对较低,因此,这种方式更适用于小型低空遥感无人机。
一种稳定平台中陀螺漂移滤波算法的设计与实现
通过卡尔曼滤波方法对陀螺仪的随机漂移进行处理时,首先需对陀螺仪的输出信号进行预处理并使其 满足平稳随机序列,然后建立相应的时序模型,并对其检验适用性. 这类建模方法在文献[2-3]中已经给出了 说明. 另外本文综合考虑了系统实时性要求及模型适用性要求等方面因素,故采用 AR(1)模型对陀螺仪随 机噪声进行建模分析.
系统运行时,轻轻旋转 MPU6050 陀螺模块,使陀螺输出的反馈信号不为零,然后利用同样的方法对原始 数据和滤波后的数据进行采集. 为了更明显的观察,分别对原始数据和滤波后的数据进行 MATLAB 仿真. 得到如图 4 所示的动态工作仿真图. 3.3 分析总结
通过滤波前后数据仿真图的对比可以看出,MPU6050 陀螺模块无论是处在静态工作状态还是动态工作 状态,都能有效抑制信号中的扰动现象,使陀螺输出的反馈信号趋向平稳,有效地提高了系统在运行时的工 作精度. 所以卡尔曼滤波算法是提高稳定控制系统精度的关键部分,且在实际应用中简单方便.
在
实
际
的
陀
螺
随
机
漂
移
数
据
处
理
中
,X
a k
=
[ω
k
]rk T ,rk 为陀螺的随机漂移量,ωk 为陀螺的实际角速率
值,Γk,k - 1 、φk,k - 1 、Hk 均为单位矩阵,Πk,k - 1 是建立陀螺随机漂移模型的参数值 .[5]
2 滤波器性能的检验
2.1 仿真验证 本文以 MPU6050 陀螺仪模块为仿真试验对象来进行检测. MPU6050 是一个数位运动处理硬件加速引
收稿日期:2013-11-03 基金项目:苏州市科技计划项目“集图像采集功能的新型 3G 网络环境监测小型浮标研制”(SGZ2012064);国家自然科学
基于双正交小波的稳定平台系统中陀螺信号滤波应用研究
中 图 分类 号 : 66 1 U 6 2
文 献 标 识 码 : A
文章编号 : 0 1 0—82 (0 7 0 0 3 0 0 89 20 )4— 0 2— 5
Ap ia in o y o Sin lPr c si g i a iie a f r s d o pl to fG r g a o e sn n St b l d Plto m Ba e n c z
‘
i gb t o a t e s s mmer , n i rv d f tr g meh d o d l s u r a e n bo to o a w v lti p e e t d C mb — n oh c mp c n s y t a mp o e l i to fmo ue q a e b s d o ir g n l a ee s r s n e . o i  ̄ ien h nn 0 ci r n a d t e df r n e o o i o e e, ai be t rs od f n t n i a o td h x e i na e u t s o h i g3 " rt i n h i e e td c mp st n lv l a v r l h e h l u ci s d p e F e e p r eo i i a o me tlr s l h w t e s meh d c n ei n t in ln ie o OG e e t ey a d at i etra c r c h n IR f tra d o l o u a wa ee l r to a l mia e sg a o s f F f ci l n t n b t c u a y ta I l n rh g n l v ltf t . v a e i e ie Ke r s bo t o o a w v ]t sa i z d pa fr ; b r p i g r ; os e u t n y wo d : irh g n l a ee ; tbl e lt m f e t y o n i r d ci i o i o c e o
光电稳定平台中陀螺随机漂移的处理方法
光电稳定平台中陀螺随机漂移的处理方法
朱华征;周晓尧;张文博;范大鹏
【期刊名称】《中国惯性技术学报》
【年(卷),期】2009(17)2
【摘要】在详细分析陀螺随机漂移对光电稳定平台精度影响的基础上,提出了Allan方差与功率谱相结合的分析和评价标准,采用了时间序列分析法进行建模.针对光电稳定平台不同的应用环境,分别比较了陀螺随机漂移的处理方法.实验证明,前向线性滤波在中高频段的噪声滤除方面,要优于低通滤波器;同时在保留低频段的有用信号和了解噪声特性方面,要优于卡尔曼滤波:而且在实时的在线应用方面,要优于小波滤波.结果表明:前向线性滤波适合于高带宽光电稳定平台系统的实时在线应用.【总页数】6页(P225-230)
【作者】朱华征;周晓尧;张文博;范大鹏
【作者单位】国防科学技术大学机电工程与自动化学院,长沙,410073;国防科学技术大学机电工程与自动化学院,长沙,410073;国防科学技术大学机电工程与自动化学院,长沙,410073;国防科学技术大学机电工程与自动化学院,长沙,410073
【正文语种】中文
【中图分类】U666.1
【相关文献】
1.非平稳时间序列的陀螺随机漂移数据处理方法 [J], 谢聂;朱家海;胡炜涛
2.光电平台中微型挠性陀螺组件的改进与实现 [J], 王平;杨静;倪丽莎;张广鹏
3.光纤陀螺在机载光电稳定平台中的应用 [J], 余珊珊;夏军
4.光电稳定跟踪平台中微机电陀螺滤波方法研究 [J], 张文博;李凯;朱尤攀;范大鹏
5.光电陀螺稳定平台中的分数阶伪微分反馈控制 [J], 丁策;尹传力;汪永阳
因版权原因,仅展示原文概要,查看原文内容请购买。
光电稳定平台中陀螺随机漂移的处理方法_朱华征
∫ P (ω ) = +∞ e− jωτ R (τ ) dτ , −∞
∫ R (τ ) = 1 +∞ ejωτ P (ω ) dω
频段的有用信号和了解噪声特性方面,要优于卡尔曼滤波;而且在实时的在线应用方面,要优于小波滤波。
结果表明:前向线性滤波适合于高带宽光电稳定平台系统的实时在线应用。
关 键 词:光电稳定平台;陀螺;随机漂移;Allan 方差;滤波
中图分类号:U666.1
文献标志码:A
Processing of gyro drift for opto-electronic stabilization platform
对于平台设计人员而言,不必一味地强调陀螺的精度,应根据设计指标及具体的载体环境来选择合适的陀螺,这 就需要设计人员深入了解陀螺在稳定平台中的作用,以及陀螺漂移的分析、建模和处理方法。基于此,本文仔细分析 了陀螺随机漂移对稳定平台精度的影响,采用 Allan 方差与功率谱相结合的评价标准,针对平台不同应用的条件,比较 了陀螺随机漂移处理的四种滤波方法:数字低通滤波、卡尔曼滤波、前向线性滤波和小波滤波;并进行了实验验证。
那么,根据 Allan 方差的定义求出均方差,在最小均方意义下, 拟合式(7)并计算出 Allan 方差参数 N 、B 、K 、R 、Q 。
2.2 陀螺随机漂移建模
通常,陀螺随机漂移是非平稳的随机过程,处理这类随机
过程较成熟的建模方法是时间序列分析法。
时间序列分析是对一组离散随机数据序列,进行时域和频
2π −∞
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
通过卡尔曼滤波方法对陀螺仪的随机漂移进行处理时,首先需对陀螺仪的输出信号进行预处理并使其 满足平稳随机序列,然后建立相应的时序模型,并对其检验适用性. 这类建模方法在文献[2-3]中已经给出了 说明. 另外本文综合考虑了系统实时性要求及模型适用性要求等方面因素,故采用 AR(1)模型对陀螺仪随 机噪声进行建模分析.
准 差 的 作 用 及 其 特 性 可 知 ,误 差 标 准 差 的 降 低 表 明 了 所 采 集 的 数 据 的 离 散 程 度 降 低 ,稳 定 性 有 了 很 大 的 提
升. 因此采用这样的处理方法可以实现数据的稳定处理.
3 系统测试
为了便于观察卡尔曼算法在整个系统中的滤波效果,结合系统对陀螺输出数据进行仿真. 下面主要对 静态工作和动态工作时的数据进行仿真. 3.1 静态工作数据仿真
未加滤波算法时,采集陀螺仪的 X 轴数据并将其导入 MATLAB,从而得到 X 轴原始角速度的仿真图,如 图 1 所示,角度的跳动在±2°位置左右. 理想状态下的 X 轴数据应该是过 0 水平线,在实际测量中,通过 X 轴 原始角速度仿真图可以看出,陀螺仪在静态情况下,X 轴输出信号是在 0 均值的水平线上随时间作无规律跳 动的随机变量.
参考文献:
[1] 袁广民,李晓莹,常洪龙,等. MEMS 陀螺随机误差补偿在提高姿态参照系统精度中的应用[J]. 西北工业大学学报,2008,26 (6):777-781.
[2] 吉训生,王寿荣. MEMS 陀螺仪随机漂移误差研究[J]. 宇航学报,2006,27(4):640-642. [3] 杨叔子,吴雅. 时间序列分析的工程应用[M]. 武汉:华中理工大学出版社,2007:87-93. [4] 吴富梅,杨元喜. 基于高阶 AR 模型的陀螺随机漂移模型[J]. 测绘学报,2007,36(4):389-394. [5] 戴洪德,周绍磊. 卡尔曼滤波及其实时应用[J]. 应用数学,2010(4):42-91.
擎,包含 3 轴陀螺仪、3 轴加速器,并可通过 I2C 端口连接其他磁力传感器、加速器等. 可处理运动感测的复杂 数据,降低了运动处理运算对操作系统的负荷,并为应用开发提供了架构化的 API.
本文采用该模块的零偏不稳定性参数对漂移误差模型的准确性和滤波器的有效性进行验证. 在仿真验 证时,首先根据 MPU6050 陀螺的参数设置 MATLAB 的卡尔曼滤波程序中的参数,分别为陀螺仪 0.0015°/s,加 速计 0.7 mg,测量噪声 0.0030°/s 和 35 mg. 在数据采集时,先将陀螺放在一个平稳的桌面上,尽量使陀螺仪 输出值是零值或者处在某个特定的常值. 采集此时陀螺仪 X 轴的数据,比较加入卡尔曼滤波算法前后的数 据稳定性,从而判定滤波的性能.
系统运行时,将 MPU6050 陀螺模块放置在平稳的桌面上,使其处在静止工作状态,真实反馈信号为零. 然后以 1000 HZ 的采样频率对 MPU6050 模块中输出的角度值进行采集,将采集数据以. txt 形式导入 MAT⁃ LAB 中生成模型,可以得到如图 3 所示的静态工作仿真图. 3.2 动态工作数据仿真
2
王小英,林志,连军政:一种稳定平台中陀螺漂移滤波算法的设计与实现
83
在陀螺仪随机漂移误差中主要包括系统中产生的有色噪声和系统运行时陀螺自身产生的测量白色噪
声 .[4] 通过 AR(1)模型描述陀螺仪的随机漂移误差后,将 AR(1)模型改为状态空间模型,然后采用状态扩增
法,得到状态空间方程.
设系统方程为
X
a k
=
éëêWX Kkùûú
(4)
并得到新的系统方程及观测方程:
éëêWX kkùûú
=
éφ ê ë
k, k
0
-
1
ΠΓ kk,,kk--11ùûú
éëêWX kk
-
1ùú 1û
+
é0ù ë1û
ξk
-
1
(5)
[ ] Zk = Hk 0 éëêWXkkùûú + Vk
(6)
式中:Vk 是当均值为零值时的白噪声序列,满足卡尔曼滤波的要求并能进行相应滤波方程的推导.
Design and Implementation of a Gyro Drift Filtering Algorithm of Stabilized Platform
WANG Xiao-ying, LIN Zhi, LIAN Jun-zheng
(School of Electrical and Automation Engineering, Changshu Institute of Technology, Changshu 215500, China)
系统运行时,轻轻旋转 MPU6050 陀螺模块,使陀螺输出的反馈信号不为零,然后利用同样的方法对原始 数据和滤波后的数据进行采集. 为了更明显的观察,分别对原始数据和滤波后的数据进行 MATLAB 仿真. 得到如图 4 所示的动态工作仿真图. 3.3 分析总结
通过滤波前后数据仿真图的对比可以看出,MPU6050 陀螺模块无论是处在静态工作状态还是动态工作 状态,都能有效抑制信号中的扰动现象,使陀螺输出的反馈信号趋向平稳,有效地提高了系统在运行时的工 作精度. 所以卡尔曼滤波算法是提高稳定控制系统精度的关键部分,且在实际应用中简单方便.
2015 年
HZ 采 集 数 据 改 为
1000 HZ 的 采 样 数
据进行仿真. 分别对
5° 、15° 、50° 、150° 振
幅的陀螺信号进行
数 据 仿 真 ,采 集 原 始
工作中直接建模得
到的滤波前的数据
和加入卡尔曼算法
改善后的滤波后的 数 据 ,将 二 者 采 集 的
图 1 X 轴原始角速度仿真图
收稿日期:2013-11-03 基金项目:苏州市科技计划项目“集图像采集功能的新型 3G 网络环境监测小型浮标研制”(SGZ2012064);国家自然科学
基金项目“基于蚂蚁智能搜索行为的多细胞自动跟踪及其应用研究”(61273312);江苏省大学生创新训练计划 项目“海洋浮标陀螺稳定控制摄像系统的研制”(201410333005Z) 通讯联系人:王小英,副教授,工学博士,研究方向:嵌入式系统、图_wang@.
2
王小英,林志,连军政:一种稳定平台中陀螺漂移滤波算法的设计与实现
85
图 3 静态工作仿真
图 4 动态工作仿真
4 结论
本文针对采用传统陀螺仪建模方式 后 [2-4] 随机误差较大的问题,通过对 MPU6050 陀螺进行试验和仿真, 采 集 其 在 静 态 和 动 态 状 态 下 的 数 据 ,利 用 卡 尔 曼 滤 波 算 法 对 数 据 进 行 处 理 ,并 对 误 差 的 均 值 和 标 准 差 进 行 了比较分析,实验结果表明陀螺仪精度可以在此方法下得到有效提高,是一种可行的简便方法.
在
实
际
的
陀
螺
随
机
漂
移
数
据
处
理
中
,X
a k
=
[ω
k
]rk T ,rk 为陀螺的随机漂移量,ωk 为陀螺的实际角速率
值,Γk,k - 1 、φk,k - 1 、Hk 均为单位矩阵,Πk,k - 1 是建立陀螺随机漂移模型的参数值 .[5]
2 滤波器性能的检验
2.1 仿真验证 本文以 MPU6050 陀螺仪模块为仿真试验对象来进行检测. MPU6050 是一个数位运动处理硬件加速引
图 2 滤波后的 X 轴角速度仿真图
数据进行比较分析,以说明其适用性.
表 1 和表 2 分别是陀螺仪输出角速率的误差均值和误差标准差的数值. 从表 1 滤波前后的数据比较来
看 ,滤 波 前 后 角 速度误差均值的 变化不是很明 显. 甚至出现在 高角度时滤波后 的误差均值大于 滤波前的情况.
但对表 2 的
15
0.6350
0.0936
50
-0.3131
-0.3398
50
0.6350
0.0936
150
-0.3131
-0.6265
150
0.6350
0.0941
角度误差标准差进行比较分析时发现加入卡尔曼滤波算法后误差标准差有了很大程度的降低,滤波前的标
准差在 0.635 左右,滤波后的标准差则稳定在 0.093 左右,滤波后的误差标准差稳定在一个较小范围内. 从标
而 加 入 卡 尔 曼 滤 波 算 法 处 理 数 据 后 ,重 新 运 行 程 序 ,以 同 样 的 方 式 采 集 陀 螺 仪 的 X 轴 数 据 将 其 导 入 MATLAB,得到滤波后的 X 轴角速度仿真图,如图 2 所示,可见其角度的跳动在±1°位置左右. 采用卡尔曼滤 波方式可以很好地抑制陀螺仪的随机漂移误差,降低陀螺的随机噪声,是一种行之有效的降低误差的方法. 2.2 适应性试验
卡 尔 曼 滤 波 器 设 计 中 ,默 认 的 系 统 状 态 仿 真 矩 阵 为 单 位 矩 阵 ,这 样 就 会 使 角 速 率 值 在 一 定 的 角 度 周 期 范围内不会随卡尔曼递推公式变化. 针对这种情况,可以通过提高采样的频率方法来解决. 将之前的 100
84
常熟理工学院学报(自然科学)
摘 要:针对稳定平台工作中陀螺仪漂移问题,采用以陀螺仪角速度传感器的输出量作为观 测 量 ,建 立 陀 螺 仪 漂 移 的 数 学 模 型 和 状 态 方 程 ,然 后 利 用 卡 尔 曼 滤 波 对 含 有 噪 声 的 测 量 数 据 进 行 滤波处理的方式改善漂移问题. 仿真结果表明,该方式可以有效抑制陀螺仪信号中的扰动,提高陀 螺仪稳定平台的工作精度.
关键词:稳定平台;陀螺漂移;卡尔曼滤波 中图分类号:TP391.9 文献标识码:A 文章编号:1008-2794(2015)02-0082-04