串联滞后-超前校正剖析
自动控制原理课程设计--串联超前—滞后校正装置

目录一、设计目的-------------------------------------------------------------1二、设计要求-------------------------------------------------------------1三、实现过程-------------------------------------------------------------33.1系统概述-------------------------------------------------------- 33.1.1设计原理------------------------------------------------- 33.1.2设计步骤------------------------------------------------- 43.2设计与分析----------------------------------------------------- 53.2.1校正前参数确定--------------------------------------- 53.2.2确定校正网络的传递函数--------------------------- 53.2.3 理论系统校正后系统的传递函数和BODE 图-- 73.2.4系统软件仿真------------------------------------------ 8四、总结------------------------------------------------------------------15五、参考文献-------------------------------------------------------------16自动控制原理课程设计报告一、设计目的(1)掌握控制系统设计与校正的步骤和方法。
20 第二十讲 相位滞后和滞后-超前校正

-90 -180
PM = 45°
图.20.3 K=316的校正前系统
要求相位裕度 PM = 45º 发生在频率 ω = 5 rad/s处。 1 相位滞后校正: 用相位滞后环节将在ω = 5 rad/s频率处校正前系统的增益减小为 0db 。 2 在相位滞后校正过程中, 假设不会改变复 合后的相位。
60
1
10
100
M db
40
20 0
40db
0
′ ω gc
φ
-90 -180
PM = 50°
图.20.4 确定新的增益穿越频率
确定τ : 两个转折频率低于频率ωgc’=3。 这由以下两个因素来确定: (1) 较高的转折频率 1/ τ 需要满足校正装置 在该转折频率处引起的相位滞后量不超过 设计过程中相位裕度要求的10%。 通常 1/ τ = ωgc’/10。 (2) 较低的转折频率不能太小, 要保持带宽 不变。 通常1/ τ = ωgc’/10。
10
M db
40
校正后幅值
40db
20 0
φ
0
ωp
ωm
ωZ
校正后相位
ω gc
PM = 50°
-90 -180 -270
图.20.5 校正后系统的伯德图
2 1.8 1.6 1.4
幅值
1.2 1.0 0.8 0.6 0.4 0.2 0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 2
伯德图的特征
1. 滤波器仅产生衰减而增益没有改变 (α< β ) 2. 低频幅值为1,而高频幅值为
β ∆M = −20lg α
3. 相位先滞后,后超前, 但高频 和低频时的相位皆为零。 4. 最大相位滞后和最大相位超前 发生在各自滤波器的转折频率之间。
自控原理超前滞后校正
定常系统的频率法超前校正1问题描述用频率法对系统进行校正,是利用超前校正网络的相位超前特性来增大系统的相位裕量,从而提高系统的稳定性,致使闭环系统的频带扩展,以达到改善系统暂态响应的目的。
但系统频带的加宽也会带来一定的噪声干扰,为了系统具有满意的动态性能,高频段要求幅值迅速衰减,以减少噪声影响。
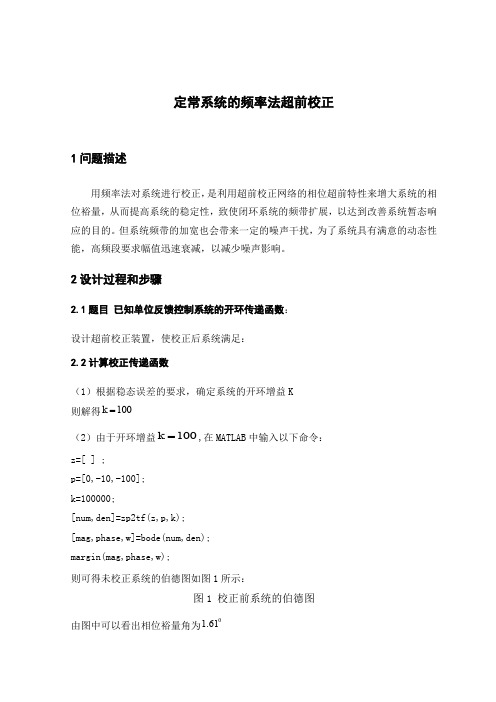
2设计过程和步骤2.1题目 已知单位反馈控制系统的开环传递函数:设计超前校正装置,使校正后系统满足:2.2计算校正传递函数(1)根据稳态误差的要求,确定系统的开环增益K则解得100k =(2)由于开环增益100k =,在MATLAB 中输入以下命令:z=[ ] ;p=[0,-10,-100];k=100000;[num,den]=zp2tf(z,p,k);[mag,phase,w]=bode(num,den);margin(mag,phase,w);则可得未校正系统的伯德图如图1所示:图1 校正前系统的伯德图由图中可以看出相位裕量角为061.1(3)谐振峰值为%0.161 1.250.4r M σ-=+=, 给定系统的相位裕量值1arcsin()53.1301r M γ==,由于未校正系统的开环对数幅频特性在剪切频率处的斜率为40/db dec -,一般取005~10ε=,在这里取为10,超前校正装置应提供的相位超前量φ,即:5201.611061.11301.531=+-=+-==εγγφφmε是用于补偿因超前装置的引入,使系统的剪切频率增大而增加的相角迟后量。
(4)根据所确定的最大相位超前角m φ,按下式计算相应的α(5)计算校正装置在m w 处的幅值110log α。
由于校正系统的对数幅频特性图,求得其幅值为110log α-处的频率,该频率m φ就是校正后系统的开环剪切频率c w ,即76.80==m c ωω(6)确定校正网络的转折频率和1ω、2ω4946.200644.076.8011=⨯===αωωm T ,(7)画出校正后系统的伯德图,并验算相应的相位裕量是否满足要求?如果不满足,则改变ε值,从步骤(3)开始重新进行计算。
温度控制系统的滞后超前校正

题 目: 温度控制系统的滞后超前校正初始条件:某温箱的开环传递函数为 1.5()(61)sp e G s s s -=+要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)1、 试用Matlab 绘制其波特图和奈奎斯特图,计算相角裕度和幅值裕度;2、 试设计滞后超前校正装置,使系统的相角裕度增加20度。
3、 用Matlab 对校正后的系统进行仿真,画出阶跃相应曲线时间安排:指导教师签名: 年 月 日 系主任(或责任教师)签名: 年 月 日温度控制系统的滞后超前校正1 滞后-超前校正设计目的和原理1.1 滞后-超前校正设计目的所谓校正就是在系统不可变部分的基础上,加入适当的校正元部件,使系统满足给定的性能指标。
校正方案主要有串联校正、并联校正、反馈校正和前馈校正。
确定校正装置的结构和参数的方法主要有两类:分析法和综合法。
分析法是针对被校正系统的性能和给定的性能指标,首先选择合适的校正环节的结构,然后用校正方法确定校正环节的参数。
在用分析法进行串联校正时,校正环节的结构通常采用超前校正、滞后校正和滞后-超前校正这三种类型。
超前校正通常可以改善控制系统的快速性和超调量,但增加了带宽,而滞后校正可以改善超调量及相对稳定度,但往往会因带宽减小而使快速性下降。
滞后-超前校正兼用两者优点,并在结构设计时设法限制它们的缺点。
在此课题中,滞后-超前校正设计的主要目的是使开环传递函数的相角裕度增加20度。
1.2 滞后-超前校正设计原理滞后-超前校正RC 网络电路图如图1所示:图1 滞后-超前校正RC 网络它的传递函数:)1)(1()1)(1()(asT s aT s T s T s G b a b a c ++++=其中a>1,(1+)s T a /(1+aT )s a 为网络的滞后部分,(1+s T b )/(1+s T b /a)为网络的超前部分。
滞后-超前校正RC 网络特性如图2所示图2 滞后-超前校正RC 网络特性无源滞后-超前网络的对数幅频特性如上图,其低频部分和高频部分均起于和终于零分贝水平线。
串联校正
串联校正6.3.1串联超前校正(基于频率响应法)用频率法对系统进行校正的基本思路是:通过所加校正装置,改变系统开环频率特性的形状,即要求校正后系统的开环频率特性具有如下特点:✍低频段的增益充分大,满足稳态精度的要求;✍中频段的幅频特性的斜率为-20dB/dec,并具有较宽的频带,这一要求是为了系统具有满意的动态性能;✍高频段要求幅值迅速衰减,以较少噪声的影响。
用频率法对系统进行超前校正的基本原理,是利用超前校正网络的相位超前特性来增大系统的相位裕量,以达到改善系统瞬态响应的目点。
为此,要求校正网络最大的相位超前角出现在系统的截止频率(剪切频率)处。
对截止频率没有特别要求时。
用频率法对系统进行串联超前校正的一般步骤可归纳为:✍根据稳态误差的要求,确定开环增益K。
✍根据所确定的开环增益K,画出未校正系统的波特图,计算未校正系统的相位裕度 。
✍根据截止频率c ω''的要求,计算超前网络参数a 和T ;关键是选择最大超前角频率等于要求的系统截止频率,即c m ωω''=,以保证系统的响应速度,并充分利用网络的相角超前特性。
显然,c m ωω''=成立的条件是a L L c c c o lg 10)()(==''-ωω (6-35)由上式可求出aa T m ω1= (6-36)由(6-36)求出T。
✍验证已校正系统的相位裕度γ''。
✍由给定的相位裕度值γ,计算超前校正装置提供的相位超前量ϕ,即补偿校正前给定的←+-==↑↑''εγϕϕγmε是用于补偿因超前校正装置的引入,使系统截止频率增大而增加的相角滞后量。
ε值通常是这样估计的:如果未校正系统的开环对数幅频特性在截止频率处的斜率为-40dB/dec ,一般取︒︒=10~5ε;如果为-60dB/dec 则取︒︒=20~15ε。
✍根据所确定的最大相位超前角m ϕ按m ma ϕϕsin 1sin 1-+=(6-37) 算出a 的值。
自控课程设计实验报告串联超前校正滞后装置

课题:串联超前校正滞后装置专业:电气工程及其自动化班级:组长:组员:指导教师:设计日期:成绩:超前校正课程设计报告一、设计目的(1)把握操纵系统设计与校正的步骤和方式。
(2)把握对操纵系统相角裕度、稳态误差、剪切频率、相角穿越频率和增益裕度的求取方式。
(3)把握利用Matlab 对操纵系统分析的技术。
熟悉MATLAB 这一解决具体工程问题的标准软件,能熟练地应用MATLAB 软件解决操纵理论中的复杂和工程实际问题,并给以后的模糊操纵理论、最优操纵理论和多变量操纵理论等奠定基础。
(4)提高操纵系统设计和分析能力。
二、设计要求与内容已知单位负反馈系统的开环传递函数0()(1)(0.251)K G S S S S =++,试用频率法设计串联校正装置,要求校正后系统的静态速度误差系数1v K 5s -≥,系统的相角裕度045γ≥,校正后的剪切频率2C rad s ω≥已知参数和设计要求:1.前期基础知识,要紧包括MATLAB 系统要素,MATLAB 语言的变量与语句,MATLAB 的矩阵和矩阵元素,数值输入与输出格式,MATLAB 系统工作空间信息,和MATLAB 的在线帮忙功能等。
2.操纵系统模型,要紧包括模型成立、模型变换、模型简化,Laplace 变换等等。
3.操纵系统的时域分析,要紧包括系统的各类响应、性能指标的获取、零极点对系统性能的阻碍、高阶系统的近似研究,操纵系统的稳固性分析,操纵系统的稳态误差的求取。
4.操纵系统的根轨迹分析,要紧包括多回路系统的根轨迹、零度根轨迹、纯迟延系统根轨迹和操纵系统的根轨迹分析。
5.操纵系统的频域分析,要紧包括系统Bode图、Nyquist图、稳固性判据和系统的频域响应。
6.操纵系统的校正,要紧包括根轨迹法超前校正、频域法超前校正、频域法滞后校正和校正前后的性能分析。
三、实现进程1、系统概述所谓校正,确实是在系统中加入一些其参数能够依照需要而改变的机构或装置,使系统整个特性发生转变,从而知足给定的各项性能指标。
自动控制原理第六章第三讲超前网络及其串联校正
画未校正系统对数频特性 L ( ) ) 的要求,计算超前网络参数a和T; 根据截止频率 c
/
成立的条件是: L/ (c ) Lc (m ) 10lg a 选择 m c
由上式可求出a ,再由 T
2) 按扰动补偿
Gn (s)
N(s)
R(s) + E(s)
+
G1 (s)
G2 (s)
C(s)
图3-26 按扰动补偿的复合控制系统
C ( s) 扰动作用下的输出:
G2 ( s)[1 G1 ( s)Gn ( s)] N ( s) 1 G1 ( s)G2 ( s)
扰动作用下的误差:E ( s) C ( s)
4、串联滞后 校正 步骤:
确定开环增益K
根据稳态误差的要求
画出待校正系统Bode图,并求待校正系统的 c / ( c / )
h
) 曲线 选不同的 c ,绘制 (c
//
根据 要求 由下式选已校正系统的截止频率 c
指标要求值
) c (c ) (c
如果局部反馈回路本身稳定,且在对系统动态性能起主要影响的 范围内,如能选择结构参数;
使 | G2 ( j)Gc ( j) | 1 则
整个反馈回路的 传递函数等效为:
G2 c ( j )
1 Gc ( s )
1 Gc ( j )
G2 c ( s)
只与校正装置Gc(s)有关,和被包围的G2(s)全然无关, 达到了以1/Gc(s)取代G2(s)的效果。
第六章 线形系统的校正方法
第三讲
•无源滞后-超前网络及其串联校正 •反馈校正、复合校正基本原理
线性系统,超前、滞后校正
L' ' (c ' ' ) 20lg L' (c ' ' ) 0
1 0.1c ' ' T
5)验证已校正系统的相角裕度和幅值裕度是否满足要求。
例
单位负反馈系统的开环传递函数为:
K G0 ( s) s(0.1s 1)(0.2s 1)
设计指标: (1)校正后系统的静态速度误差系数Kv=30 ; (2)开环系统截止频率 c ≥2.3rad/s ; (3)相位裕量γ"≥40°; (4)幅值裕量h"≥10dB ; 试设计串联校正装置。
串联滞后校正
利用滞后网络的高频幅值衰减特性使截止频率降低, 从而使系统获得较大的相位裕量,同时保持低频段 的开环增益不受影响。
Gc ( s )
与超前校正比较
Ts 1
Ts 1
滞后校正既能提高系统的稳态性能,有基本上不改变系 统的动态性能,采用超前校正的系统带宽大于滞后校正 的,带宽越大,抗干扰能力越差。 不过如果采用超前-滞后校正,则更完美。
自由响应:动态电路的完全响应中,已由初条确定待定系数k 的微分方程通解部分,称为电路系统的自由响应, 它的函数形式是由电路系统本身结构决定的,与外加激励无关。 强迫响应:动态电路微分方程的特解形式,仅仅由激励决定, 称为强迫响应;
1)零极点和传递函数对系统性能的影响 2)串联超前校正与串联滞后校正
当零极点相重合,产生零极点对消时,相应的模态也消失
串联超前校正与串联滞后校正
串联超前校正
1)改善系统的动态性能,实现在系统静态性能不受 损的前提下,提高系统的动态性能。 2)通过加入超前校正环节,利用其相位超前特性来 增大系统的相位裕度,改变系统的开环频率特性。 3)一般使校正环节的最大相位超前角出现在系统新 的穿越频率点。 其传递函数为
自控实验报告超前校正(3篇)
第1篇一、实验目的1. 理解超前校正的原理及其在控制系统中的应用。
2. 掌握超前校正装置的设计方法。
3. 通过实验验证超前校正对系统性能的改善效果。
二、实验原理超前校正是一种常用的控制方法,通过在系统的前向通道中引入一个相位超前网络,来改善系统的动态性能。
超前校正能够提高系统的相角裕度和截止频率,从而改善系统的快速性和稳定性。
超前校正装置的传递函数一般形式为:\[ H(s) = \frac{1 + \frac{K}{T_{s}s}}{1 + \frac{T_{s}s}{K}} \]其中,\( K \) 为校正装置的增益,\( T_{s} \) 为校正装置的时间常数。
三、实验设备1. 控制系统实验平台2. 数据采集卡3. 计算机及仿真软件(如MATLAB/Simulink)4. 待校正系统四、实验步骤1. 搭建待校正系统模型:在仿真软件中搭建待校正系统的数学模型,包括系统的传递函数、输入信号等。
2. 分析系统性能:通过仿真软件分析待校正系统的性能,包括稳态误差、超调量、上升时间等。
3. 设计超前校正装置:根据待校正系统的性能要求,设计合适的超前校正装置参数。
4. 仿真验证:将设计好的超前校正装置添加到系统中,进行仿真验证,观察校正后的系统性能。
5. 实验数据分析:对实验数据进行分析,比较校正前后系统的性能差异。
五、实验内容1. 系统模型搭建:搭建一个简单的二阶系统模型,其传递函数为:\[ G(s) = \frac{1}{(s+1)(s+2)} \]2. 系统性能分析:分析该系统的稳态误差、超调量、上升时间等性能指标。
3. 设计超前校正装置:根据系统性能要求,设计一个超前校正装置,其传递函数为:\[ H(s) = \frac{1 + \frac{K}{T_{s}s}}{1 + \frac{T_{s}s}{K}} \]其中,\( K = 2 \),\( T_{s} = 0.5 \)。
4. 仿真验证:将设计好的超前校正装置添加到系统中,进行仿真验证,观察校正后的系统性能。
自动控制原理课程设计--串联超前—滞后校正装置
目录一、设计目的-------------------------------------------------------------1二、设计要求-------------------------------------------------------------1三、实现过程-------------------------------------------------------------33.1系统概述-------------------------------------------------------- 33.1.1设计原理------------------------------------------------- 33.1.2设计步骤------------------------------------------------- 43.2设计与分析----------------------------------------------------- 53.2.1校正前参数确定--------------------------------------- 53.2.2确定校正网络的传递函数--------------------------- 53.2.3 理论系统校正后系统的传递函数和BODE 图-- 73.2.4系统软件仿真------------------------------------------ 8四、总结------------------------------------------------------------------15五、参考文献-------------------------------------------------------------16自动控制原理课程设计报告一、设计目的(1)掌握控制系统设计与校正的步骤和方法。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
例 6-5 设某单位反馈系统,其开环传递函数 K G0 ( s) s( s 1)(0.125s 1) 要求Kv=20(1/s),相位裕度γ=50°,调节时间ts不超过4s,试 设计串联滞后-超前校正装置,使系统满足性能指标要求。 解:确定开环增益K=Kv=20 作未校正系统对数幅频特性渐近曲线,如图6-22所 示。由图得未校正系统截止频率ωc=4.47rad/s,相位 裕度γ=-16.6°。 20 20 lg 0 ωc=4.47rad/s c c
20 20 9.1 2.2 c
此时,滞后-超前校正网络的传递函数可写为 s (1 )(1 s ) a Gc ( s ) 9.1s (1 )(1 0.11s )
a
根据相角裕度要求,估算校正网络滞后部分的转折频率ωa。 校正后系统的开环传递函数
20(1 Gc ( s )G0 ( s ) s (1 0.125s )(1 s ) )(1 0.11s )
(Ta s 1)(Tb s 1) Gc (s) Tb (Ta s 1)( s 1)
j
-αωb前校正的设计步骤如下: 根据稳态性能要求,确定开环增益K; 绘制未校正系统的对数幅频特性,求出未校正系统的 截止频率ωc、相位裕度γ及幅值裕度h; 使中频段斜率为-20dB/dec ,确定ωb。通常,在未校正 系统对数幅频特性上,选择斜率从-20dB/dec 变为-40dB/dec 的转折频率作为校正网络超前部分的转折频率ωb。这种选 法可以降低已校正系统的阶次,且可保证中频区斜率为20dB/dec,并占据较宽的频带。
tan1 21.2 2.2 tan1 0.11 2.2 51.21
调节时间
ts
1 1 [2 1.5( 1) 2.5( 1) 2 ] 3.75( s) c sin sin
满足系统的稳态、动态性能指标要求。
h
h
γ
a
50 tan1 0.11 c
校正后系统的开环传递函数
Gc ( s)G0 ( s) 20(1 2.33s) s(1 0.125s)(1 21.2s)(1 0.11s)
校验已校正系统的各项性能指标。 静态速度误差系数 Kv=20(1/s) 相角裕度 180 tan1 2.33 2.2 90 tan1 0.125 2.2
。 根据响应速度要求,选择校正后系统的开环截止频率 c
) 20lg Tbc 0 根据等式 20lg L0 (c
滞后-超前网络的 最大幅值衰减量
未校正系统在 处的幅值量 c
超前部分在c 处贡献的幅值
''
求出衰减因子1/α。 根据相角裕度要求,估算校正网络滞后部分的转折频率ωa。 校验已校正系统的各项性能指标。
1 1 [2 1.5( c 1) 2.5( 1) 2 ] 2.11rad / s ts sin sin
试选取 c 2.2rad / s
) 20lg Tbc 0 根据等式 20lg L0 (c 20 0 20lg 20 lg 20 lg c c c
180 90 tan1 c tan1 0.125 c 16.6
原系统不稳定,不能满足性能指标要求。
在未校正系统对数幅频特性上,选择斜率从-20dB/dec 变为-40dB/dec的转折频率作为校正网络超前部分的转折 频率:ωb=1。
。 根据响应速度要求,选择校正后系统的开环截止频率 c
系统校正前的 单位阶跃响应
系统校正后的 单位阶跃响应
6.5 串联滞后-超前校正(基于频率特性法)
这种校正方法兼有滞后校正和超前校正的优点,即已 校正系统响应速度快,超调量小,抑制高频噪声的性能也 较好。当未校正系统不稳定,且对校正后的系统的动态和 静态性能(响应速度、相位裕度和稳态误差)均有较高要求 时,显然,仅采用上述超前校正或滞后校正,均难以达到 预期的校正效果。此时宜采用串联滞后-超前校正。 串联滞后-超前校正的基本思想是,利用校正装置的超 前部分来增大系统的相位裕度,以改善其动态性能;利用 它的滞后部分来改善系统的静态性能,两者分工明确,相 辅相成。
a a
9.1s
校正后系统的相角裕度 1 c 180 tan 90 tan1 0.125 c
a
tan
1
9.1 c
求得 a 0.43rad / s 滞后-超前校正网络的传递函数
(1 2.33s)(1 s) Gc ( s) (1 21.2s)(1 0.11s)