第十五章 虚位移原理
第十五章 虚位移原理(2)

第十五(1)章 虚位移原理虚位移原理应用功的概念分析系统的平衡问题,是研究静力学平衡问题的另一途径。
虚位移原理与达朗贝尔原理结合起来组成动力学普遍方程,为求解复杂系统的动力学问题提供了另一种普遍的方法,构成了分析力学的基础。
本书只介绍虚位移原理的工程应用,而不按分析力学的体系追求其完整性和严密性。
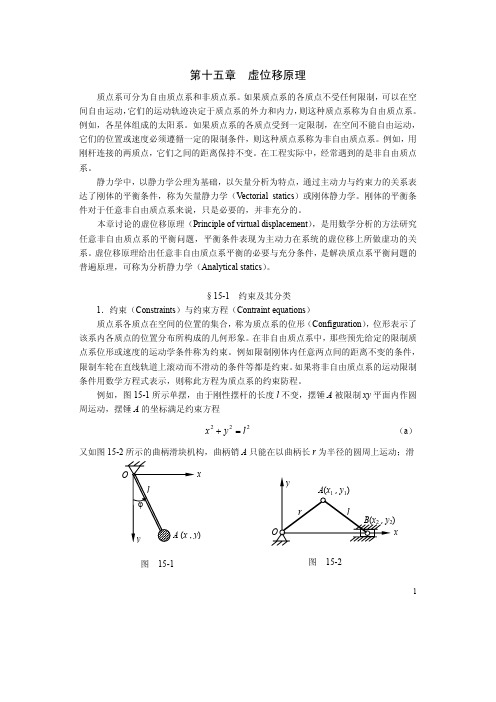
§15-1 约束·虚位移·虚功1.约束及其分类在第一章,我们将限制物体位移的周围物体称为该物体的约束。
为研究上的方便,现将约束定义为:限制质点或质点系运动的条件称为约束,表示这些限制条件的数学方程称为约束方程。
我们从不同的角度对约束分类如下。
(1)几何约束和运动约束 限制质点或质点系在空间的几何位置的条件称为几何约束。
例如图15-1所示单摆,其中质点M 可绕固定点O 在平面Oxy 内摆动,摆长为l 。
这时摆杆对质点的限制条件是:质点M 必须在以点O 为圆心、以l 为半径的圆周上运动。
若以x ,y 表示质点的坐标,则其约束方程为222l y x =+。
又如,质点M 在图15-2所示固定曲面上运动,那么曲面方程就是质点M 的约束方程,即()0,,=z y x f又例如,在图15-3所示曲柄连杆机构中,连杆AB 所受约束有:点A 只能作以点O 为圆心,以r 为半径的圆周运动;点B 与点A 间的距离始终保持为杆长l ;点B 始终沿滑道作直线运动。
这三个条件以约束方程表示为()()0222222==-+-=+B A B A B A A y l y y x x r y x上述例子中各约束都是限制物体的几何位置,因此都是几何约束。
在力学中,除了几何约束外,还有限制质点系运动情况的运动学条件,称为运动约束。
例如,图5-4所示车轮沿直线轨道作纯滚动时,车轮除了受到限制其轮心A 始终与地面保持距离为r 的几何约束r y A =外,还受到只滚不滑的运动学的限制,即每一瞬时有0=-ϖr v A上述约束就是运动约束,该方程即为约束方程。
第十五章虚位移原理

F'
B
A
W
FN s 2Fl 0
2π
s
h
h s 2π
δs FN
FN h W (2Fl 2π ) 0
FN h 2 Fl 0 2π
1 FN 4π Fl h
例题
第15章 虚位移原理
例 题 1
例题
第15章 虚位移原理
2 1 2 1
2
2 1
y
x22 y22 l32 ( x1 x2 ) ( y1 y2 ) l
2 2 2
l2 m1
m2 (x ,y ) 2 2
l3 x
l1
(x1,y1)
例3:曲柄连杆机构 约束方程为:
2 2 xA yA r2
y
r φ
A (xA,yA) l
B x (xB,yB)
xC
xC
例题
第15章 虚位移原理
例 题 7
已知图所示结构,各杆都以光滑铰链连接,且有 AC=CE=BC=CD=DG=GE=l。在点G作用一铅直方向的力F,求 支座B的水平约束反力FBx。
sin ( ) M FAr cos FB r 0 cos
例:图示平面等腰三角形机构,在C点作用主动力P,系统 处于平衡,求A、B两处的约束反力。
A、B两处共有4个反力,应逐个求之。 先求哪个反力,则解除该方向的约束,代 之以对应的反力。暂时不求的则不要解除, 仍保持原约束的性质。
力学小魔术
一根重为F的均质杆简支于A,B支座上,支座的反力 分别为F/2。如果突然将支座B撤去,显然在重力矩 作用下AB杆将绕A点顺时针转动而掉下。现在,允 许在AB杆上采取一些措施,但不能对系统施加绕A 点的外力矩,使得在支座B撤去后,AB杆仍能维持 水平而不掉下。你能做到吗?
虚位移原理

1 1 3 2 Q Q M 0 2 2 4 l
FA 850 N
P
Q
Q
M
rE
A B C D
若求 E处支座反力, 则 系统的虚位移分析如 图示.
FE
l 4
E
q=400N/m , P = 200N .
M = 200 m.N . l = 8m
l 8
l 8
l 8
l 8
l 8
第十五章 虚位移原理
虚位移的英文名词是 virtual displacement . 意 思是‘ 可能的位移’. 不管是‘ 虚’ 也好, 还 是‘ 可能 ’ 也好, 它的力学含义是: 仅为约束 条件所允许的位移.
引言
质点被约束在某一平面上, 其 上有力的作用.
显然, 在此平面上有无限多为 约束所允许的 位移.
FBx B F1'yC F1yG FyG 0
式中 F1 = F1'= kδ0
2 FB l sin k 0 l cos 3k 0 l cos 3 Fl cos 0 FB 3 Fctg k 0 ctg 2
F1
y
在图示坐标下 E
D
F1'
k
yG 3l sin yC l sin x B 2 l cos
ix
·C A θ θ B
( F
FB
x
x i Fiy yi ) 0
yG 3l cos yC l cos x B 2l sin
f ( xi , yi , zi ) 0 或
f ( x, y, z ) 0
2. 虚位移
定义: 在给定瞬时, 质点系在约束条件允许下所能实现的任意假想 的无限小的位移.
虚位移原理

的投影应相等,即
|rA | sin ( ) |rB | cos
可见 A,B 两点的虚位移大小之比等于
|rA | cos |rB | sin ( )
根据虚位移原理的平衡方程,有
W FA | rA | FB | rB | 0
yB
d
cos2
yC yB
O
例题4
y l B
θ
FA A
rA
rB x
C d
FC rC
38
例题
虚位移原理
例题4
应用虚位移原理得 y
W FA sin xA FA cos yA FCyC 0
(FAl
sin
2
FAl
cos2
Fc d
cos2
)
0
O
因 0 ,故有
FC
l d
cos2
FA
l B
θ
d FC
)
0
y MAA φ
δφ
F1 F2 FG
B
C
F3
H E
D
因广义坐标的独立变分δφ为任意微量
δyF1
δyG1 δyD1 δyH1
0
δyB1
故
MA
2F1
8 3
F2
4 3
F3
1867
N m
44
例题
虚位移原理
例题5
2. 为了求出固定端A的约束力FA, 应将A端约束换成铅直滚轮,而把固定 端的铅直约束力FA视作为主动力。
三、虚位移
在质点系运动过程的某瞬时,质点系在约束允许的条件 下,可能实现的任何无限小位移,称为质点系(在该瞬时) 的虚位移。
第15章虚位移原理例题

已知ctgθ=2。
解:将杆BD截断,暴露出内力
F
、F
给出力
P
、
F
处的虚位移 rD、rB
几何法: rC cos rD
C
rC cos(90 2 ) rB cos
A
θ
θ rC D F Fθ
rB
B
由虚功原理 PrD FrB 0 0
PrC cos F 2sinrC 0 (P cos 2F sin )rC 0
P
rD
F P ctg P
2
FNB
P1
Hale Waihona Puke r1 rBP2rC rB
M
rB
FNB
P1
r1 rB
P2
rC rB
M
rB
M
FNB
而
r1 rB
1 2
,
rC rB
181
,
rB
rG
4
1rB
rE
6
1rB
rC
12
1rB
1 12
181
11 96
FNB
1 2
P1
11 8
P2
11 96
M
例11: 书15-15
用虚位移原理求图示桁架中杆BD的内力,
例9:三铰拱上有载荷作用力P及力偶M, 各尺寸如图,求B铰的约束力。 解:(1)求B 铰水平约束力:
解除B 铰的水平约束,代之以水平力FBx 分析主动力:M,P,FBx ,
给虚位移,求虚位移关系:
C*为刚体CDB的瞬心,
刚体CDB的虚转角也为 。 rD a (1)
rB 2a (2)
列虚功方程:
re
300
cos
第十五章 虚位移原理
虚位移原理
质点系可分为自由质点系和非质点系。如果质点系的各质点不受任何限制,可以在空 间自由运动, 它们的运动轨迹决定于质点系的外力和内力, 则这种质点系称为自由质点系。 例如,各星体组成的太阳系。如果质点系的各质点受到一定限制,在空间不能自由运动, 它们的位置或速度必须遵循一定的限制条件,则这种质点系称为非自由质点系。例如,用 刚杆连接的两质点,它们之间的距离保持不变。在工程实际中,经常遇到的是非自由质点 系。 静力学中,以静力学公理为基础,以矢量分析为特点,通过主动力与约束力的关系表 达了刚体的平衡条件,称为矢量静力学(Vectorial statics)或刚体静力学。刚体的平衡条 件对于任意非自由质点系来说,只是必要的,并非充分的。 本章讨论的虚位移原理(Principle of virtual displacement) ,是用数学分析的方法研究 任意非自由质点系的平衡问题,平衡条件表现为主动力在系统的虚位移上所做虚功的关 系。虚位移原理给出任意非自由质点系平衡的必要与充分条件,是解决质点系平衡问题的 普遍原理,可称为分析静力学(Analytical statics) 。 §15-1 约束及其分类
f j ( x1 , y1 , z1 ; "; xn , y n , z n ) = 0
§15-2 1.虚位移(Virtual displacement)
( j = 1, 2, ", s )
(15-3)
虚位移与自由度
由于约束的限制,非自由质点或质点系中的质点,其运动不可能完全自由。即约束限 制了质点某些方向的位移,但也容许质点沿另一些方向的位移。因此,我们定义: 质点或质点系在给定位置(或瞬时) ,为约束所容许的任何无限小位移,称为质点或 质点系在该位置的虚位移。质点的虚位移记为
虚位移原理 哈工大理论力学课件

求:机构平衡时加在被压物体上的力.
解: 以手柄、螺杆和压板组成的系统为研究对象 受力如图.
给虚位移 与s
F
s 2 h
F'
W F F N s 2 F l 0
s
W F2F lF 2N h0
FN
因是任意的
2FlFNh 0
2
FN4lLeabharlann hF例15-2
已知:图中所示结构,各杆自重不计,在G点作用一铅直向上的
或记为
WFi0
此方程称虚功方程,其表达的原理称虚位移原理或虚功原理.
对于具有理想约束的质点系,其平衡的充分必要条件是:
作用于质点系的所有主动力在任何虚位移中所作的虚功的和
等于零. 解析式为
F xx ii F yy ii F zz ii 0
例15-1
已知:如图所示,在螺旋 压榨机的手柄AB上作用一在水平 面内的力偶( F, F ),其力矩 M2Fl,螺杆
W N W N i F N r ii 0
光滑固定面约束、光滑铰链、无重刚杆,不可伸长 的柔索、固定端、轮子只滚不滑等约束为理想约束.
§ 15-2 虚位移原理
设质点系处于平衡,有
即
F i F Ni 0
F iri F Ni ri0
F F iirr ii 0 F N ir i 0
二、虚位移的计算
1、几何法
这里仅讨论定常约束的情形。在此条件下,真实
位移是虚位移中的一个。因此可以用求实位移的方法
来求各质点虚位移之间的关系。这种方法又称虚速度
法。例如:
rB vBt vB rA vAt vA
C
y
A
O
rA
B rB
虚位移原理
虚位移原理
虚位移原理是波动理论中的重要概念之一,它用来描述波的传播过程中的位移现象。
根据虚位移原理,当波传播到某一位置时,该位置上的物质并不发生实际的位移,而是被波动所“激发”产生了相对于平衡位置的微弱位移现象。
虚位移原理的提出主要是为了解释波动现象中的一些奇特现象,特别是在波的干涉和衍射现象中的一些观察结果。
在干涉现象中,当两个波相遇时,它们会产生明暗相间的干涉条纹。
根据虚位移原理,这些干涉条纹实际上是由波动所引起的位移造成的,而不是由物质实际的位移所引起的。
因此,虚位移原理解释了为什么在干涉实验中物质并没有发生实际的位移。
在衍射现象中,当波通过一个孔或一个边缘时,波会“弯绕”到非直线传播的路径上。
也是根据虚位移原理,我们可以解释为什么波在通过一个小孔时会扩散开来,形成衍射图样。
根据虚位移原理,通过小孔的波通过“弯绕”的方式传播,使得波的幅度在不同位置上有所变化,从而形成了衍射图样。
总的来说,虚位移原理为我们理解波动现象提供了一个重要的概念和解释框架。
它帮助我们解释了很多波动现象中观察到的奇特现象,并在波动理论的发展中起到了重要的作用。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
F r F
i i
Ni
ri 0
如果质点系具有理想约束,则约束力在虚位移中所作的虚功和 为零,即 FNi ri 0 WFi Fi ri 0 (15-1)
西南交大一般力学教研室
动力学:第十五章 虚位移原理原理
所以可得结论:对于具有理想约束的质点系,其平衡的充分 必要条件是:作用于质点系的所有主动力在任何虚位移中所 作的虚功的和为零。这个结论称为虚位移原理,也称虚功原 理,式(15-1)又称虚功方程。该方程也可写成解析式:
x A r cos , y A r sin xB r cos l 2 r 2 sin 2 , y B 0
广义坐标选定后, 质点系中每一质点的直 角坐标都可表示为广义
坐标的函数。
西南交大一般力学教研室
动力学:第十五章 虚位移原理原理
例如:双锤摆。设只在铅直平面内摆动。
西南交大一般力学教研室
动力学:第十五章 虚位移原理原理
一般地,受到s个约束的、由n个质点组成的质点系,其 自由度为 k 3n s 通常,n 与 s 很大而k 很小。为了确定质点系的位置,用适当选 择的k 个参数(相互独立),要比用3n个直角坐标和s个约束方 程方便得多。 用来确定质点系位置的独立参数,称为广义坐标。 广义坐标的选择不是唯一的。广义坐标可取线位移(x, y, z, s 等) 也可取角位移(如 ,, 等)。在完整约束情况下,广义坐标的 数目就等于自由度数目。 一般地,设有由n个质点组成的质点系,具有k个自由度,取q1、 q2、……、qk 为其广义坐标,质点系内各质点的坐标及矢径可表 为广义坐标的函数。
f j ( x1, y1, z1,, xn , yn , zห้องสมุดไป่ตู้ ) 0 ( j 1,2,, s)
式中n为质点系的质点数,s为完整约束的方程数。
西南交大一般力学教研室
动力学:第十五章 虚位移原理原理
2.虚位移 系统中质点在平 M 衡时本来是不动 的,但我们设想 在约束允许条件 下,给某质点一个任意的、极其微小的位移。 某瞬时,质点系中的质点发生的为约束允许的任意的无限小位 移,称为质点系(在该瞬时)的虚位移。 虚位移可以是线位移,也可以是角位移。通常用变分符号 表 示虚位移。 实位移是在一定条件下真正实现的位移,它除了与约束条件有 关外,还与时间、主动力以及运动的初始条件有关;而虚位移 仅与约束条件有关,在定常约束下,实位移只是所有靴位移中 的一个,而虚位移可以有多个,甚至无穷多个。
( Fxi xi Fyi yi Fziz i ) 0 (15-2)
*上面的推导证明了虚位移原理的必要性,下面给出其充分性:
充分性:即质点系满足 Fi ri 0,质点系一定平衡。若 Fi ri 0 , 而质点系不平衡,则至少有第i个质点不平衡。
Fi FNi FRi 0
西南交大一般力学教研室
动力学:第十五章 虚位移原理原理
而对于非定常约束,如图所示,由于实位 移与时间有关,而虚位移是将时间固定后 ,约束允许的位移,此时实位移不再是虚 位移之一。 *质点系中各质点的虚位移之间存在着一 定的关系, 确定这些关系通常有两种方法: (一) 几何法。由运动学知,质点的位移与速度成正比,可以 用分析速度的方法分析各点虚位移之间的关系。
西南交大一般力学教研室
动力学:第十五章 虚位移原理原理
4.理想约束 如果在质点系的任何虚位移上,所有约束力所做虚功的和 等于零,称这种约束为为理想约束。质点系受有理想约束 的条件:
W
N
W
Ni
F
Ni
ri 0
*在动能定理一章中已分析过光滑固定面约束、光滑铰链、无 重刚杆、不可伸长的柔索、固定端等约束均为理想约束,现从
2、解析法
将C、A、B点的坐标表示成
广义坐标 的函数,得
对广义坐标 求变分,得各点
虚位移在相应坐标轴上的投影:
xC acos , yC asin x A l cos , y A lsin x B 2acos , y B 0
xC asin , yC acos x A lsin , y A l cos x B 2asin , y B 0
(i 1,2, n)
z i
zi zi zi q1 q 2 q k q1 q2 qk
3.虚功 力在质点发生的虚位移上所作的功称为虚功,记为 W 。 W F r或W Fxx Fyy Fzz
虚功有正功和负功,它尽管和实位移中的元功采用了同一符 号W,但它们之间有本质区别,虚功是假象的,不是真实 发生的。在静止质点系或机构中,力没有做任何功,但力可 以有虚功。
西南交大一般力学教研室
动力学:第十五章 虚位移原理原理
rC a , rA l xC asin , yC acos x A lsin , y A l cos x B 2asin , y B 0
f ( x, y, z ) o
当约束对质点或质点系的运动情况进行限制 时,这种约束条件称为运动约束。如图4,车 轮作纯滚动。
yA r 几何约束 0 A r 运动约束 v A r 0或x
西南交大一般力学教研室
动力学:第十五章 虚位移原理原理
(2)定常约束和非定常约束 当约束条件与时间有关,并随时间变化时,这 类约束称为非定常约束。 如图,初始时摆长 l0 , 匀速v拉动绳子。则 该方程中显含时间t x 2 y 2 (l0 vt) 2 约束条件不随时间改变的约束为定常约束。定常约束方程中不 显含时间,前面的例子中约束条件都是定常约束。 (3)其他约束 若约束方程中含有坐标对时间的导数,且方程不可能积分为有 限形式,即约束方程中含有的坐标导数项不是某一函数全微分, 这类约束称为非完整约束。反之,若约束方程中不包含坐标对 时间的导数,或者约束方程中的微分项可以积分为有限形式, 这类约束称为完整约束。例如上述做纯滚动的车轮的约束就是 完整约束。
虚功的角度,这些约束也为理想约束。
西南交大一般力学教研室
动力学:第十五章 虚位移原理原理
1)光滑支承面
2)光滑铰链
3)刚体的纯滚动
WN N r 0
W
Ni
N r N r 0
4)无重刚杆。5)不可伸长的柔索。
W
Ni
( N F ) rC 0
西南交大一般力学教研室
动力学:第十五章 虚位移原理原理
§15-2 虚位移原理
如图,设一质点系静止平衡,任取一质点,则 该质点也处于静止平衡状态,有
Fi FNi 0
若给质点系某虚位移,则作用与该质点上力的 虚功之和为
Fi ri FNi ri 0
对质点系所有质点,都可以得到上面同样的等式,把这些等式 相加,得
( x1 , y1 ) , ( x 2 , y 2 ) x1 y1 a 2 ( x 2 x1 ) 2 ( y 2 y1 ) 2 b 2
2 2
两个自由度 取广义坐标,
x1 asin , y1 acos x2 asin bsin , y2 acos bcos
在 FRi 方向上产生实位移 dri ,取 ri dri ,则 对质点系:(Fi FNi ) ri 0 而理想约束下
( Fi FNi ) ri FRi ri 0
F
Ni
ri 0
F r
i
i
0 与前题条件矛盾 故
F r
i
i
0 时质点系必处于平衡。
西南交大一般力学教研室
动力学:第十五章 虚位移原理原理
虽然虚位移原理的条件是质点系应具有理想约束,但也可以用 于有摩擦的情况,只要把摩擦力当作主动力,在虚功方程中计 入摩擦力所作的功即可。
dr v dt
(二) 解析法。质点系中各质点的坐标可表示为广义坐标的函数 ( q1,q2,……, qk),广义坐标分别有变分 q1 ,q2 ,,qk ,各 质点的虚位移 ri 在直角坐标上的投影可以表示为
西南交大一般力学教研室
动力学:第十五章 虚位移原理原理
xi xi xi xi q1 q 2 q k q1 q2 qk yi yi yi yi q1 q 2 q k q1 q2 qk
西南交大一般力学教研室
动力学:第十五章 虚位移原理原理
[例1] 分析图示机构在图示位置时, 点C、A与B的虚位移。
(已知 OC=BC= a, OA=l )
解:此为一个自由度系统,取 OA杆与x 轴夹角为广义坐标。 1、几何法
rC a rA l rC PC a 1 rB PB 2asin 2sin
提供了另一种普遍方法,构成了分析力学的基础。
西南交大一般力学教研室
动力学:第十五章 虚位移原理原理
§15-1
例如:
约束 • 虚位移 • 虚功
平面单摆
曲柄连杆机构
xA2 yA2 r 2
( xB xA )2 ( yB y A )2 l 2 , yB 0
x2 y 2 l 2
1.约束及其分类 为研究方便,对静力学中约束概念重新定义,即限制质点或质 点系运动的各种条件称为约束。表示这些限制条件的数学方程 称为约束方程。下面从不同角度对约束分类。
西南交大一般力学教研室
动力学:第十五章 虚位移原理原理
(1)几何约束和运动约束 限制质点或质点系在空间的几何位置的条件称 为几何约束。如前述的平面单摆和曲柄连杆机 构中的限制条件都是几何约束。 又如图3,质点M在固定曲面上运动,其曲面 方程就是该质点的约束方程,即
*5.自由度、广义坐标 一个自由质点在空间的位置:( x, y, z ) 一个自由质点系在空间的位置:( xi , yi , zi ) (i=1,2……n) 3n 对一个非自由质点系,受s个完整约束,(3n-s )个独立坐标。 确定一个受完整约束的质点系的位置所需的独立坐标的数目, 称为该质点系的自由度的数目,简称为自由度。