滑移线理论及应用
第八章-滑移线
第8章 滑移线理论及应用§8. 1 平面应变问题和滑移线场滑移线理论是二十世纪20年代至40年代间,人们对金属塑性变形过程中,光滑试样表面出现 “滑移带”现象经过力学分析,而逐步形成的一种图形绘制与数值计算相结合的求解平面塑性流动问题变形力学问题的理论方法。
这里所谓“滑移线”是一个纯力学概念,它是塑性变形区内,最大剪切应力max (τ)等于材料屈服切应力(k )的轨迹线。
对于平面塑性流动问题,由于某一方向上的位移分量为零(设du Z =0),故只有三个应变分量(x d ε、y d ε、xy d γ),也称平面应变问题。
根据塑性流动法则,可知p m y x Z -==+==σσσσσ2/)(2 (8-1)式中,m σ为平均应力;p 称为静水压力。
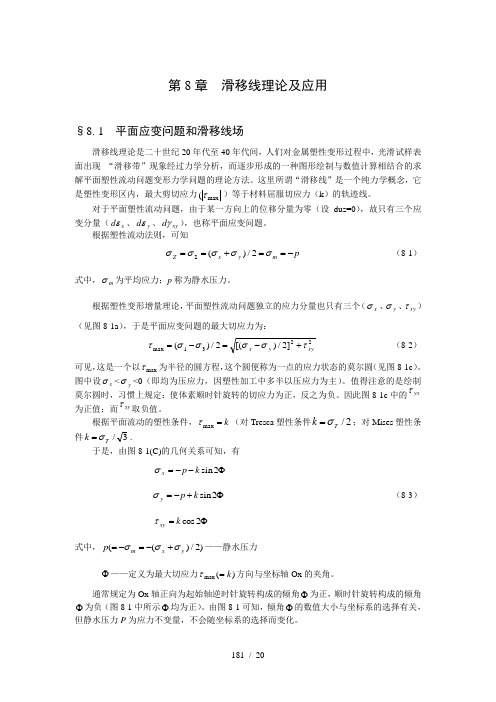
根据塑性变形增量理论,平面塑性流动问题独立的应力分量也只有三个(x σ、y σ、xy τ)(见图8-1a ),于是平面应变问题的最大切应力为:2231max ]2/)[(2/)(xy y x τσσσστ+-=-= (8-2)可见,这是一个以max τ为半径的圆方程,这个圆便称为一点的应力状态的莫尔圆(见图8-1c )。
图中设x σ<y σ<0(即均为压应力,因塑性加工中多半以压应力为主)。
值得注意的是绘制莫尔圆时,习惯上规定:使体素顺时针旋转的切应力为正,反之为负。
因此图8-1c 中的yx τ为正值;而xy τ取负值。
根据平面流动的塑性条件,k =max τ(对Tresca 塑性条件2/T k σ=;对Mises 塑性条件3/T k σ=.于是,由图8-1(C)的几何关系可知,有 Φ--=2sin k p x σΦ+-=2sin k p y σ (8-3)Φ=2cos k xy τ式中,)2/)((y x m p σσσ+-=-=——静水压力Φ——定义为最大切应力)(max k =τ方向与坐标轴Ox 的夹角。
通常规定为Ox 轴正向为起始轴逆时针旋转构成的倾角Φ为正,顺时针旋转构成的倾角Φ为负(图8-1中所示Φ均为正)。
第4章 滑移线场理论
点起、始位置的另一族两条滑移线的曲率变化量 (如dRβ)等于该点所移动的路程(如dSα)。
11
4.3 塑性区应力边界条件:
自由表面
Principle of Metal Forming
12ቤተ መጻሕፍቲ ባይዱ
接触表面之:
摩擦切应力为零
摩擦切应力为某中间值
Principle of Metal Forming
13
摩擦切应力为最大值
7
由称Saint-Venant塑性流动方程
Principle of Metal Forming
8
4.2 滑移线的性质
4.2.1 H.Hencky方程 也称沿线特性,描述滑移线上各点的平均应力变化规律。
Principle of Metal Forming
由上式知,任一族中任一条滑移线上 两点的平均应力符合下列关系式:
一条滑移线(如β1或β2 )相交两点的倾角差和静水压力变化量均保
Principle of Metal Forming
持不变。
若单元三个节点角ω、σm知,则第四点知。 推论: 异族截区内,一直皆直。
10
4.2.3 H.Hencky第二定理
一动点沿某族任意一条滑移线移动时,过该动
Principle of Metal Forming
Principle of Metal Forming
14
4.2 常见的滑移线场类型
正交直线 1 ) 直 线 型
Principle of Metal Forming
2 ) 简 单 型
奇点
有心扇形:直线+圆弧 无心扇形:包络+渐开
15
3 ) 直 简 组 合 型
Principle of Metal Forming
7-2 滑移线速度场理论及应用
ω+dω
P2
vα ω
x
滑移线上邻近两点的速率分解
金属塑性成形原理
盖林格尔速度方程:
dv v d 0 (沿α线) dv vd 0 (沿β线)
(7-12)
此方程式给出了沿滑移线上速度分量的变化特性,它可确定塑性变形 区内的速度分布。
若 α 滑移线为直线,则
d 0, v 常数
直线滑移线场,
v 常数,v 常数
金属塑性成形原理
对于由两族 α与β 连续正交的曲线网络所 构成的滑移线场,则在速度平面上相应有一 由两族连续正交的速度矢端曲线网络所构成 的速度矢端图(速端图),即为速度场。
滑移线和速度矢端曲线之间的关系
金属塑性成形原理
2.几种速度间断线的速端图
(1)滑移线ab为速度间断直线 其一侧为刚性区(“-”) ,另一侧为塑性区(”+‘)。由于ab两侧分别具有同一
(7-10)
金属塑性成形原理
过P点取滑移线为坐标系,以滑移线α、β的切线代替x、y轴,则有:
x , y
x ,y
由于σα,σβ 是最大切应力所在平面上的正应力
m
代入(7-10)得:
0, 0
(7-11a)
d
dt
0 d
0
d
dt
0 d
0
(7-11b)
取滑移线为坐标系
速度,故在速度平面的速度矢端曲线分别归缩为一个点,其速端图如图所示。
a)速度间断直线
b)速端图
图7-22 速度间断直线及其速端图
金属塑性成形原理
(2)滑移线ab为速度间断曲线,两侧分别为刚性区与塑性区 刚性区一侧在速度平面上的速度矢端曲线归缩为一点,而塑性区一侧
滑移线理论及应用PPT课件
17
在同一族(例如a族)的两条滑移线(例如a 1和a 2线)与另 一族(例如β族)的任一条滑移线(例如β1和β2线)的两个 交点上,其切线夹角△ω与平均应力的变化△σm 均保持常数, 如下图所示:
对于图中的节点(1,1)、(1,2)、(2,1)、(2,2)有:
点P1,平面塑性变形时,
最大切应力成对出现,并
相交。
6
三、滑移线和ω 角规定
α 与β 滑移线规定
设α 与β 线构成右手坐标系,
设代数值最大的主应力σ1 作用线在第一与三象限,则:
α 线两侧最大切应力顺时针
方向。 β线两侧最大切应力逆
时针方向。
Hale Waihona Puke 或:σ1方向顺时针转45°得到α线
由σ1的方位线顺时针转45°到达的滑移线称α线,而由σ3线 的方位线顺时针转45°到达的滑移线称为β线。α线与β的方向
代入平面应变问题的微分平衡方程
x yx 0
x y
xy y 0
x y
11
m
x
2k c os2
x
sin2
y
0
m
x
2k s in2
x
cos2
y
0
取滑移线本身作为坐标轴,设为轴a和β轴。这样,滑移 线场中任何一点的位置,可用坐标值a和β表示。当沿着a坐标 轴从一点移动到另一点时,坐标值β不变,当然沿着坐标轴β 从一点移动到另一点时,坐标轴a也不变。
将xy坐标原点置于两条滑移线的交点a上,并使坐标轴x、 y分别与滑移线的切线x` 、y`重合。
第七章-滑移线场理论简介

第一节 塑性平面应变状态下的应力莫尔 圆与物理平面
平面应变时,独立的应力
分量为 x 、 y 和 xy 。
z
2
x
y
2
m
2
1 2
(1
3)
z
1 2
( x
y)
应力莫尔圆中大圆的圆心 为( m ,0),半径为
R
K
1 2
(1
3)
x
2
y
2
xy2
1 m k 2 m 3 m k
ma mb 2K
K p (K) 2K( )
44
p 2K(1 )
2
平面变形挤压
平面变形挤压:挤压
y
前后的宽度不变。挤
压的程度用挤压前后
的面积比来表示,称
为挤压比。对于平面
变形挤压,可由挤压
前后料厚度之比表示。
2
xy
x xy
xy x
x
a
x
K
K
m
m
m
xy
ya)b)来自摩擦切应力为某一中间值的接触面处的滑移线
2、常见的滑移线场类型
直线滑移线场——两族正交的直线 简单滑移线场——一直一曲
有心和无心扇形场 直线与简单滑移线场组合 正交曲线滑移线场
均匀应力场
有心扇形场
无心扇形场
直线与简单滑移线场组合
沿同一条滑移线的速度间断值为常数,其方 向随滑移线而改变
dv1 v1 d 0 dv2 v2 d 0
v1 v2
dv1 dv2
v1 v2 v 常数
第五节 滑移线场理论在塑性成形中的 应用举例
应用滑移线理论求解塑性成型问题,其 本质就是根据应力边界条件求解滑移线场和 应力状态,并根据速度边界条件求出和滑移 线场相匹配的速度场以进行校核。
滑移线名词解释
滑移线名词解释滑移线是指在流体力学中,流体流动时,流体中的某一点随着时间的推移而发生位置变化的线。
这个概念在飞行器设计中非常重要,因为滑移线可以用来描述飞行器的稳定性和控制性能。
在本文中,我们将详细解释滑移线的概念、特性和应用。
一、滑移线的概念滑移线是在流体力学中用来描述流体流动的一种线。
在飞行器设计中,滑移线通常指飞行器中心重心和气动中心之间的一条线。
当飞行器受到外界扰动时,它会发生滑移和偏航运动,滑移线的位置和方向可以用来描述飞行器的运动状态。
二、滑移线的特性1. 滑移线的位置滑移线的位置取决于飞行器的气动特性和重心位置。
在大多数情况下,滑移线位于飞行器的重心前方,因为气动中心通常在重心前面。
滑移线的位置可以通过实验和计算得出,对于不同的飞行器来说,滑移线的位置也不同。
2. 滑移线的方向滑移线的方向取决于飞行器的气动特性和机翼的布局。
在大多数情况下,滑移线与机翼的平面垂直,因为机翼产生的升力和阻力一般都在机翼平面内。
然而,对于某些机翼布局不规则的飞行器,滑移线的方向可能会产生变化。
3. 滑移线的稳定性滑移线的稳定性是指飞行器在受到外界扰动时,滑移线的位置和方向是否会发生变化。
在理想情况下,飞行器应该具有稳定的滑移线,即受到扰动时滑移线的位置和方向不会发生明显变化。
如果滑移线不稳定,飞行器就会变得难以控制,甚至容易失控。
三、滑移线的应用1. 飞行器稳定性分析滑移线可以用来分析飞行器的稳定性和控制性能。
通过测量飞行器的滑移线位置和方向,可以判断飞行器的稳定性是否良好,以及是否需要进行调整。
2. 飞行器控制设计滑移线还可以用来设计飞行器的控制系统。
通过控制飞行器的滑移线位置和方向,可以使飞行器保持稳定,避免发生滑移和偏航运动,从而提高飞行器的控制性能。
3. 飞行器改进设计滑移线还可以用来指导飞行器的改进设计。
通过分析飞行器的滑移线位置和方向,可以发现飞行器存在的问题和缺陷,从而提出改进措施,使飞行器更加稳定和安全。
《材料成型原理》.
7.3
(一)汉基第一定理 在同一族的两条滑移线(例如α1和 α2线)与另一族的任一条滑移线( β1或 β2线)的两个交点上,其切线夹角 与 平均应力的变化均保持常数。 在图6-4中,由α族的α1转到α2时, 则沿β族的β1 、β2 ,有 Δ ω =ω2,1 -ω1,1=ω2,2 -ω1,2 =…=常数 Δ σቤተ መጻሕፍቲ ባይዱ=σm2,1 -σm1,1=σm2,2 -σm1,2=…=常 数
x xy 0 x y y xy 0 y x
m 2K cos 2 sin 2 0 x x y m 2K sin 2 cos 2 0 y x y
m 2K 1 S
m 2 K 2 S
7.2 汉基(Hencky)应力方程
如果以上两式分别沿滑移线积分,则
1 S 常数
沿线积分 沿线积分
2 S 常数
则汉基(Hencky)应力方程
m 2K m 2K
X轴和y轴设在滑移线上,则:
0, dx dS , dy dS
, x S y S
7.2 汉基(Hencky)应力方程
m 2K 0 S S m 2K 0 S S
m 2K 0 S m 2K 0 S
汉基积分或汉基方程为: m 2 K (沿α线) m 2 K (沿β线) 汉当沿α族(或β族)中同一条滑移线移动时,任意函数ξ(或 η)为常数,只有从一条滑移线转到另一条时, ξ(或η)值才 变。由汉基积分可以推出,沿同一滑移线上平均应力的变化, 与滑移线的转角成正比,比例常数为2K。 即为: a bb沿滑移线的转角,而 ma 表示从点 mb 2K - ωb) a 过渡到点 即式中 (ωa σma- σmb表示相应点间平均应力的变化。此式指出了滑移线 上平均应力的变化规律。当滑移线的转角愈大时,平均应力的 变化愈大。若滑移线为直线,即转角为零,则各点的 平均应力相等。
第七章 滑移线理论及应用
§7. 1 滑移线的概念
K
sin
2
xy K cos 2
对于主应力状态有
4
1
2
m m
K
3 m K
对于理想刚塑性材料,由于 K 为常值,因此
,塑性变形体内各点的应力莫尔圆大小相等,
应力状态的差别只在于平均应力值 m的不同
,即各点应力莫尔圆的圆心在 轴上的位置
最大切应力的方向与第一主应力 的夹角为
与 ox 轴成 夹角;
4
,
作用在最大切应力平面上的正应力大小等于中间主应 力或平均应力 :
2
m
1 2
(
1
2)
1 2
(
x
y )
由应力状态和应力莫尔圆可知,各应力分量
可以 m 、
用表示
x y
m m
K sin 2
这是给定两条相交的滑移线为初始线,求 作整个滑移线场的边值问题,即所谓黎曼 (Riemann)问题。就是根据已知两条相交 的滑移线,要求进一步求出一个区域内的 滑移线场。
已知两条滑移线 O' A 和 O' B 要求出区
域 O' ACB 的滑移线场
按给定的转角 等分成若干微小段,得到
相应滑移线网的节点,并分别给与编号,沿
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
证明:设α、β线上任一点的曲率半径分别为R α 、R β ,由 曲率半径的定义知:
1/ R / S 和 1/ R / S ΔSβ沿弧S α的变化率为:
d (S ) dS
d (R ) dS
R S
R
S
根据汉盖第一定理有,
d (S dS
)
R S
当曲线四边形单元趋近无限小时
tg
Am AB
沿β2线从点B→点C
pB 2kB pc 2kc
于是,得沿路径A→B→C和静水压力差
同理
PC PA 2k(A C 2B )
PC PA 2k(2D A C ) 由上两式可得
C B D A
同理
pC pB pD pA
二、汉盖第二定理
一动点沿某族任意一条滑移线移动时,过该动点起、始 位置的另一族两条滑移线的曲率变化量(如dRβ)等于该点 所移动的路程(如dSα)。 1
线的方向。
二、滑移线场绘制的数值计算方法
滑移线数值计算方法的实质是:利用差分方程近似代 替滑移线的微分方程,计算出各结点的坐标位置,建立滑 移线场,然后利用汉盖应力方程计算各结点的平均应力p 和角。
根据滑移线场块的邻接情况,滑移线场的边值有三类。
1)特征线问题 这是给定两条相交的滑移线为初始线,求作整个滑移线
滑移线的曲率变化量(如dRβ )等于该点所移动的路程(如dSα); • 同族滑移线必然有个相同的曲率方向。
§8.5 应力边界条件和滑移线场的绘制
一、应力边界条件
1)自由表面 塑性加工时塑性区可能扩展到自由表面,如平冲头压入半无限体工件(见
图 8-10a)。因为自由表面(设为 x 轴)上的法向应力( n y 0 )和切 应力( k 0 )。根据式(8-3),可知滑移线性边界点上的k 角和静水压力别
为:
2k cos1( k / k) / 2(8.11) pk n k sin(2k ) 0 k x k k sin(2k ) 2k 可见,变形区的自由表面上的 k / 4 和 pk k 。
依照 8-1 节所述方法,可绘制出自由表面上任一点应力的莫尔圆,并根据
y 为主应力 1 (即自由表面的外法线方向)确定 线、 线方向。
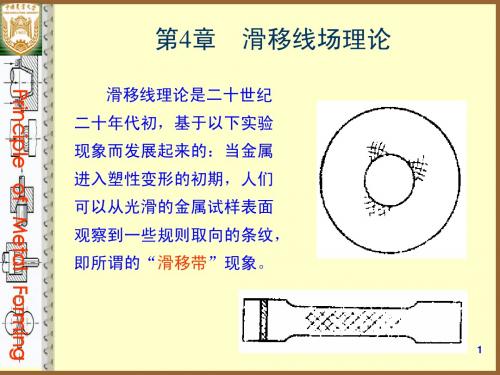
实验表明,条纹上各点的切线方向正好是该点的最 大切应力方向。同时,金属塑性变形的微观机理研究表 明,这些条纹也恰好是金属晶体滑移变形的实际滑移面 与金属试样表面的交线,滑移线的名称即由此而来。据 此,塑性力学上把塑性流动平面内,最大切应力等于屈 服切应力的轨迹线称为滑移线。由于各点的最大切应力 平面是成对正交的,因此滑移线在塑性流动平面内为两 族正交的曲线。
3)混合问题
这是给定一条α线OA,和与之相交的另一条不是滑移线 的某曲线OB(可能是接触边界线或变形区中的对称轴线) 上倾角值Ф1(见图8-9)。如对称轴线上,其Ф1等于π/4。
先假设找到了给定滑移线上点 O 附近的第一条 1 线,它与滑移线 和边界
线的交点为 a1(1,0)和 b1(1,1),根据以弦代弧的几何关系,得 a1Ob1 (1/ 2)[(0,0) (1,0)] (0,0) / 2
由图8-1(C)的几何关系可知,有
x p k sin 2 y p k sin 2 xy k cos 2
式中静水压力 p( m ( x y ) / 2) Ф——定义为最大切应力τmax (= k)方向与坐标轴Ox的夹角
图 8-1c 中 P' C 为最大主应力 1 的作用方向, P' D 为最小主 应力 3 的作用方向。定义 为 P' I, max( k) 作用方向; 为 P' Ⅱ, max k 的作用方向。
由于金属塑性变形的基本机制是晶体在切应力作用 下沿着特定的晶面和晶向而产生滑移,滑移结果在试样 表面显露出滑移台阶,因此,滑移线是金属塑性变形时, 发生晶体滑移的可能地带。只有特定的晶面和晶向的切 应力达到金属的临界屈服切应力时才会使晶体产生滑移 变形。
现在,滑移线理论成为了求解理想刚塑性体平面应变问 题的重要方法之一,广泛应用于长宽比较大的矩形工件的平 锤压缩、宽板平辊轧制和板条平面挤压、拉拔等变形力和应 力分布的计算上。
Ob1a1 / 2 (1,1) / 2 / 2 (1,1) / 2 Oa1b1 / 2 / 2 / 2
由于三角形三个内角之和为 ,因此得
(0,0) (1,1)
式中, 和 分别为所预选的 、 线的倾角差。 于是由汉盖第一定理,可计算出点 a1 和 b1 的静水压力
自 1 作用方向顺时针旋转 / 4 ,即为 方向;逆时针方向旋 转 ( / 4) 即为 方向。据此,根据已知的 1:
α线
dy tg dx
β线 dy tg( / 2) ctg
dx
图8-2 x-y坐标系与α-β滑移经网络
§8.3汉盖(Hencky)应力方程
由平面应变问题的微分平衡方程
x yx 0
x y
xy y 0
x y 得
p 2k cos2 2k sin 2 0
x
x
y
p 2k sin 2 2k cos2 0
y
x
y
第一式乘以cosФ,第二式乘以sin Ф ,然后两相加,经整 理变换后得沿α线的微分方程
p 2k 0 或 ( p 2k) 0
y(m,n) [Ay(m,n 1) By(m 1,n) ABx(m 1,n) ABx(m,n 1)]/(A B)
据此,可依次逐渐求得场内全部结点的坐标,依编码连线, 从而绘制出等倾角差为ΔФ的滑移线网。
2)特征值问题
这是已知一条不为滑移线的边界AB上任一点的应力 分量(σx、σy、τxy)的初始值,求作滑移线场的问题,即 所谓柯西(Cauchy)问题。
第8章 滑移线理论及应用
§8.1 概述 §8.2 平面应变问题和滑移线场 §8.3 汉盖(Hencky)应力方程——滑移线
的沿线力学方程 §8.4 滑移线的几何性质 §8.5 应力边界条件和滑移线场的绘制 §8.6 三角形均匀场与简单扇形场
组合问题及实例
§8.1 概述
滑移线理论是根据平面应变的变形力学特点,通过联 解精确平衡微分方程与精确塑性条件,求得理想刚塑性体 平面应变问题变形力以及变形区内应力分布的一种图解与 数值计算相结合的方法。
d (S ) dS
R S
比较上两式,可得 R 1 同理 R 1
S
S
滑移线的基本性质:
• 滑移线为最大切应力等于材料屈服切应力为k的迹线,与主应力迹线相交 成π/4角;
• 滑移线场由两族彼此正交的滑移线构成,布满整个塑性变形区; • 滑移线上任意一点的倾角Ф值与坐标的选择相关,而静水压力p的大小与
[(
x
y
)
/ 2]2
2 xy
这是一个以τmax为半径的圆方程,这个圆便称为一点的 应力状态的莫尔圆。
a
b
c
图8-1 平面应变问题应力状态的几何表示
(a)塑性流动平面(物理平面),(b)α-β正交曲线坐标系的应力特点, (c)应力莫尔圆
根据平面流动的塑性条件, τmax = k(对Tresca塑性条件k = σT/2;对Mises塑性条件 k T / 3
类似变换可得沿β线的微分方程
p 2k 0 或 ( p 2k) 0
沿某一α线积分,得到 pa 2ka pb 2kb C1( ) 常数
或得关系式 pa pb 2k(b a )
同理
pa 2ka pb 2kb C2() 常数
或得关系式
pa pb 2k(a b)
坐标选择无关; • 沿一滑移线上的相邻两点间静水压力差( Δ pab)与相应的倾角差
(ΔФab)成正比; • 同族的两条滑称线(如α1和α2线)与另族任意一条滑称线(如β1或β 2线)
相交两点的倾角差ΔФ ,和静水压力变化量Δp均保持不变; • 一点沿某族任意一条滑移线移动时,过该动点起、始位置的另一族两条
如图8-8所示,将边界线AB分成若干等分,等分点的编码 为(1,1)、(2,2)、……(m, m)。由莫尔圆的关系式, 计算出该边界上等分点的参数p(m, m)和 Φ(m, n)。
pk ( x y ) p(m, m)
k (1/ 2)tg1[( x y ) /(2 xy)] (m,m)
近二十多年来,又推广到了主应力互为异号的平面应力 问题和轴对称问题等等方面。
d x
§8.2平面应变问题和滑移线场
对于平面塑性流动问题,由于某一方向上的位移分量为零
(设duZ=0),故只有三个应变分量(d x 、 d y 、d xy ),
也称平面应变问题。平面应变问题的最大切应力为:
max ( 1 3 ) / 2
y(m, x(m,
n) n)
y(m, n x(m, n
1) 1)
ctgv
式中
v (1/2)[ (m - 1, n) (m, n)] (m - 1, n) /2 A
v (1/2)[ (m, n - 1) (m, n)] (m, n - 1) /2 B
则得
x(m,n) [ y(m,n 1) y(m 1,n) Ax(m 1,n) Bx(m,n 1)]/(A B)
滑移线理论是二十 世纪二十年代初,基于 以下实验现象而发展起 来的:当金属进入塑性 变形的初期,人们可以 从光滑的金属试样表面 观察到一些规则取向的 条纹,即所谓的“滑移 带”现象。
实验表明,条纹上各点的切线方向正好是该点的最大 切应力方向。同时,金属塑性变形的微观机理研究表明, 这些条纹也恰好是金属晶体滑移变形的实际滑移面与金属 试样表面的交线,滑移线的名称即由此而来。据此,塑性 力学上把塑性流动平面内,最大切应力等于屈服切应力的 轨迹线称为滑移线。由于各点的最大切应力平面是成对正 交的,因此滑移线在塑性流动平面内为两族正交的曲线。
4)滑动摩擦接触表面