第七章_滑移线场理论简介
7滑移线法全解
18.2 滑移线法slip field theory内容:滑移线法原理及应用。
重点:滑移线场slip field 的合理建立。
滑移线: 塑性变形物体内各质点的最大切应力迹线特点: 滑移线(成对出现,相互正交)→滑移线场适用范围:理想刚塑性材料的平面变形问题再适当推广满足条件:静力学+运动学(速度场条件)18.2.1 基本概念18.2.1.1 平面变形的应力⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡⇒=+3212000000031σσεσσ231σσσ+=m塑变屈服时()K =-=3121max σστ莫尔圆为:⎪⎩⎪⎨⎧±=+=-=ωτωσσωσσ2cos 2sin 2sin k k k xym y m x ⎪⎩⎪⎨⎧-==+==k k m mm σσσσσσω32145时18.2.2 最大切应力迹线——滑移线变形平面xoy ,取点P 1及邻近点P 2,P 3,……P 61τ为P 1点最大切应力方向2τ为P 2点的(1τ为P 1P 2折线)当P 1P 2无限邻近时,曲线变为光滑曲线即滑移线。
α族,β族18.2.2.1 ωβα及.1)逆时针方向线组成顺时针方向族线西侧的最大切应力,.βα 图7-32)角方向成线为线4531σσβα3)()同坐标轴逆时针正轴正向为起始顺时针负角以,ox ω18.2.2.2 滑移线方程()()⎪⎩⎪⎨⎧-=+==族βωωωπctg tg tg dxdy dx dy 2Hencky 方程:ωσ~m平面应变应力平衡微分方程为:⎪⎩⎪⎨⎧=+=+∂∂∂∂∂∂∂∂00yxy x y y x x y xσττσ将屈服准则式代入有()⎪⎪⎩⎪⎪⎨⎧=--∂∂=+-∂∂∂∂∂∂∂∂∂∂02cos 2sin 20)2sin 2(cos 2yx m y x m k y k x ωωωωωωσωωσ 未知数:m σ,ω,但难求。
变换坐标系:取滑移线本身作坐标轴轴轴βα,注意:此坐标系具有当沿α线运动时β值不变,即坐标系轴是弯曲的!在α点无限近处有:0=ω αds dx = βds dy =αs x ∂∂=∂∂βs y ∂∂=∂∂0≠∂∂αωs 0≠∂∂βωs 因此变为:()线线βωσαωσββαα02)(02=∂∂+∂∂=∂∂-∂∂s k s s k s m m积分后得:()()⎩⎨⎧=+=-线线βηωσαξωσk k m m 22此式即汉基应力方程(Hencky )18.2.3 滑移线特性18.2.3.1 沿线特性沿α线:ωσ∆=∆k m 2 沿β线:ωσ∆-=∆k m 2证:设一条α线上有a 、b 两点ξωσξωσ=-=-b mb a ma k k 22 ()02=---∴b a mb ma k ωωσσωσ∆=∆∴k m 218.2.3.2 跨线特性()()⎩⎨⎧∆=∆∆=∆C B m D A m BC AD ,σσωω, 证明:先沿α线,A →B 有B B m A mA k K ωωσσ22-=-沿β线B →C 有:c mc B mB k k ωωσσ22+=+ ()c A B mA mc k ωωωσσ--=-∴22(a ) 再沿A →D (β1线)D mD A mA k k ωσσω22+=+D →C (沿线2α)c mc D mD k k ωωσσ22-=-()D C A mA mc k ωωωσσ22-+=-∴(b ) 由于a,b 式相等D B B A ωωωω+=+∴或:B c A D ωωωω-=-⎪⎭⎪⎬⎫-=-∆=∆mB mC mA mD BC AD σσσσωω:同理可证即上式即汉基第一定理即在滑移线网格中,若已知三个结点的m σ、ω值则第四个结点m σ、ω值可以求出。
滑移线法

理想刚塑性体的平面应变问题1金属塑性加工变形的特点:材料的塑性变形很大弹性变形可以忽略冲模对金属块状材料的作用(塑性成形)塑性极限状态的荷载理论分析方法:滑移线法213滑移线的几何性质当滑移线沿着与之相交的另一族滑移线过渡到同族的另一条滑移线时,和的变化为常量。
θσHencky 第一定理:沿滑移线性质:9沿着滑移线平均应力的变化与夹角的变化成比例θσ9当滑移线为直线,均沿着滑移线为常数θσ9在被两根滑移线所截的另一族滑移线中,若某一段为直线,则被截的所有滑移线段都为直线简单滑移线场1. 均匀滑移线场αβ和线为两族相互正交的直线,代表均匀应力状态2. 中心扇形滑移线场滑移线场为同心圆族和在圆心共点的直线族组成,代表简单应力状态18滑移线场求解问题的例题1. 刚性平冲头压入半平面的极限荷载2. 单边受压力的楔形体3. 两侧带缺口板条的拉伸19212. Geiringer 速度方程速度场满足的条件:0=⋅+⋅dy dv dx dv y x 沿线:αβ沿线:0tan =⋅+y x dv dv θ0cot =⋅−y x dv dv θ沿线:αβ沿线:0=⋅−θβαd v dv 0=⋅+θαβd v dv Geiringer 方程几何意义:沿滑移线方向线应变率为零23 应力场必须满足平衡条件塑性区的应力满足屈服条件;刚性区应力点不在屈服面之外 应力要满足应力边界条件¾塑性区速度和应变率是连续的, 而在刚性区应变率为零;¾体积不可压缩¾速度满足速度边界条件¾在力边界,速度使外力所做的功大于零塑性区应力和应变率满足Levy-Mises 方程解的性质。
第七章_滑移线场理论简介

1 2K 3 2K p;
ma
1 ( 1 3 ) K p 2
根据亨盖应力方程
ma mb 2K
K p ( K ) 2 K ( p 2 K (1
) 4 4
2
)
平面变形挤压
平面变形挤压:挤压 前后的宽度不变。挤 压的程度用挤压前后 的面积比来表示,称 为挤压比。对于平面 变形挤压,可由挤压 前后料厚度之比表示。
xy 0
cos 2 0
4
4
τ=0 β
自由表面 α β
τ=0
4
4
自由表面 β
4
α σm K K σm
σm
K
K
σm
σ1
σm K K
σ1=2K
代数值最大的 主应力σ1的作用线
σ3
σm K K
σ3=-2KLeabharlann σmσmαα
1 2 K , 3 0
代数值最大的主应力 σ1(=0)的作用线
m 2k 沿线 m 2k 沿 线
, 在同一条滑移线上为常数
ma mb 2k (a b ) 正号用于 线,负号 线
ma mb 2k (a b )
若滑移线场已经确定,且已知一条滑移线上任一点 的平均应力,则可确定该滑移线上各点的应力状态
一族滑移线与表面相切,另一族与之正交
σn= σm
摩擦切应力为 K的接触面
σn= σm
摩擦切应力为 K的接触面
α
0 β α α σm σ3 σ3 K β β
0
σm K σ1 α
塑性力学知识点

《塑性力学及成形原理》知识点汇总第一章绪论1.塑性的基本概念2•了解塑性成形的特点第二章金属塑性变形的物理基础1.塑性和柔软性的区别和联系2.塑性指标的表示方法和测量方法3.磷、硫、氮、氢、氧等杂质元素对金属塑性的影响4.变形温度对塑性的影响;超低温脆区、蓝脆区、热脆区、高温脆区的温度范围补充扩展:1.随着变形程度的增加,金属的强度硬度增加,而塑性韧性降低的现象称为:加工硬化2.塑性指标是以材料开始破坏时的塑性变形量来表示,通过拉伸试验可以的两个塑性指标为:伸长率和断面收缩率3.影响金属塑性的因素主要有:化学成分和组织、变形温度、应变速率、应力状态(变形力学条件)4.晶粒度对于塑性的影响为:晶粒越细小,金属的塑性越好5.应力状态对于塑性的影响可描述为(静水压力越大):主应力状态下压应力个数越多,数值越大时,金属的塑性越好6.通过试验方法绘制的塑性一一温度曲线,成为塑性图第三章金属塑性变形的力学基础第一节应力分析1.塑性力学的基本假设2.应力的概念和点的应力状态表示方法3.张量的基本性质4.应力张量的分解;应力球张量和应力偏张量的物理意义;应力偏张量与应变的关系5.主应力的概念和计算;主应力简图的画法J i TJ公式(3-14)应力张量不变量的计算J2=-®x b y+b y<!z+bF x)*Xy+Y z+l Zx2 2 2 J^-\-^z - 2 xy*zx-(=yz Vy zx,;xy)公式(3-15)应力状态特征方程O' 3 一2_ J 2b 一 J 3 = 0(当已知一个面上的应力为主应力时,另外两个主应力可以采用简便计算公式(3-35) 的形式计算)6. 主切应力和最大切应力的概念计算、 1公式(3-.25).最大切应力-max ^(匚max -二min )7. 等效应力的概念、特点和计算任意坐标系中公式(3- 31a ) = I 、(;「x -^y )2 •(二y8. 单元体应力的标注;应力莫尔圆的基本概念、画法和微分面的标注 9. 应力平衡微分方程第二节应变分析1 .塑性变形时的应变张量和应变偏张量的关系及其原因 2. 应变张量的分解,应变球张量和应变偏张量的物理意义 2. 对数应变的定义、计算 和特点,对数应变与相对线应变的关系 3. 主应变简图的画法 3. 体积不变条件公式(3- 55)用线应变-= 0 ;用对数应变(主轴坐标系中)r 亠二2 i 3=04 .小应变几何方程xex 公式(3- 66) ^ = —; yzycw站 ;二—; Z - , ZX一Z第三节 平面问题和轴对称问题-;「2 ) '2 -3)'("」3 -1)= 3J 2-z)2 -(二 z -;「x )2 6( Xy ;z •:)xyyx2 cy ex y2 czcy仝J (兰.吕 xz2 ex cz 主轴坐标系中 公式(3- 31)3 V.2 81 .平面应变状态的应力特点;纯切应力状态的应力特点、单元体及莫尔圆公式(3-86) CT z =石2 =舟(W 十也)=CT m 第四节屈服准则1 .四种材料的真实应力应变曲线 2. 屈雷斯加屈服准则公式(3-96) T max=^ = K3. 米塞斯屈服准则公式(3)0(). ®x _<!y )2 十(<!y _6)2 +(— _6)2 十6(玩";z "ZX ) =2 箱 2 =6K 2(□-二2)2 (二2 -二3)2 (二3 -二 1)2 =2打=6K 24 .两个屈服准则的相同点和差别点5 . ;「1 -匚3 - -;「s ,表达式中的系数1的取值范围第五节塑性变形时应力应变关系1 .塑性变形时应力应变关系特点 2. 应变增量的概念,增量理论公式(3- 125) 唱=仃詁丸公式(3- 129) d 上三⑺ J )] ; d xy=3^ xy22 -d ;y 二仝[;「y -2匚 6)] ; d yz 二弓仝 yza 2 2 ad 呂 1 丄 v 3 d s d ;z[6 -;Lx ;「y )] ; d zx zxcr 2 23 .比例加载的定义及比例加载须满足的条件第六节塑性变形时应力应变关系公式(3- 102)1 .真实应力应变曲线的类型第四章金属塑性成形中的摩擦1 •塑性成形时摩擦的特点和分类; 摩擦机理有哪些?影响摩擦系数的主要因素 2. 两个摩擦条件的表达式3•塑性成形中对润滑剂的要求;塑性成形时常用的润滑方法第五章塑性成形件质量的定性分析1. 塑性成形件中的产生裂纹的两个方面2. 晶粒度的概念;影响晶粒大小的主要因素及细化晶粒的主要途径3. 塑性成形件中折叠的特征第六章滑移线场理论简介1. 滑移线与滑移线场的基本概念;滑移线的方向角和正、负号的确定2. 平面应变应力莫尔圆中应力的计算;匚x 二一 K sin 2公式(7-1) a y =cr m +K sin 2oxy= K cos2 ■3. 滑移线的主要特性;亨盖应力方程公式(7-.5).二 ma -Sb »2K 「ab4. 塑性区的应力边界条件;滑移线场的建立练习题一、应力01-1的单元体和应力莫尔圆,并标注微分面。
百科知识精选滑移线
基本信息英文名:slip line中文名:滑移线隶属:塑性力学定义:试样表面出现的线纹时间:二十世纪20年代至40年代间简介材料在屈服时,试样表面出现的线纹称为滑移线。
滑移线理论是二十世纪20年代至40年代间,人们对金属塑性变形过程中,光滑试样表面出现"滑移带"现象经过力学分析,而逐步形成的一种图形绘制与数值计算相结合的求解平面塑性流动问题变形力学问题的理论方法.这里所谓"滑移线"是一个纯力学概念,它是塑性变形区内,最大剪切应力)等于材料屈服切应力(k)的轨迹线。
解释1、2节点相对位置判断构件接触碰撞点的轨迹称为滑移线.主节点所在的一侧称为主线主线上相邻节点之间的线段称为主段。
2、在塑性状态平面应变问题中,平面上每一点都存在两个相交的剪切破坏面,把各点的剪切破坏面连接起来,就可以得到两族相互正交曲线α和β,即称为滑移线。
3、0前言在塑性状态平面应变问题中,平面上每一点都存在两个相交的剪切破坏面,把各点的剪切破坏面连接起来,就可以得到两族相互正交曲线α和β,即称为滑移线.滑移线法按照其性质和边界条件,求出塑性区的应力和位移速度的分布,最后求出极限荷载。
4、滑移带晶体材料的滑移面与晶体表面的交线称为滑移线,滑移部分的晶体与晶体表面形成的台阶称为滑移台阶.由这些数目不等的滑移线或滑移台阶组成的条带称为滑移带。
5、塑料变形体内各点最大剪应力的轨迹称为滑移线.由于最大剪应力成对正交因此滑移线在变形体内成两族互相正交的线网组成所谓滑移线场。
6、这样的两组曲线在X、Y平面上形成一个曲线网称为滑移线.当物体处于屈服状态时,各点的最大剪应力达到K值,塑性变形就沿着这些曲线进行滑移。
7-2 滑移线速度场理论及应用
ω+dω
P2
vα ω
x
滑移线上邻近两点的速率分解
金属塑性成形原理
盖林格尔速度方程:
dv v d 0 (沿α线) dv vd 0 (沿β线)
(7-12)
此方程式给出了沿滑移线上速度分量的变化特性,它可确定塑性变形 区内的速度分布。
若 α 滑移线为直线,则
d 0, v 常数
直线滑移线场,
v 常数,v 常数
金属塑性成形原理
对于由两族 α与β 连续正交的曲线网络所 构成的滑移线场,则在速度平面上相应有一 由两族连续正交的速度矢端曲线网络所构成 的速度矢端图(速端图),即为速度场。
滑移线和速度矢端曲线之间的关系
金属塑性成形原理
2.几种速度间断线的速端图
(1)滑移线ab为速度间断直线 其一侧为刚性区(“-”) ,另一侧为塑性区(”+‘)。由于ab两侧分别具有同一
(7-10)
金属塑性成形原理
过P点取滑移线为坐标系,以滑移线α、β的切线代替x、y轴,则有:
x , y
x ,y
由于σα,σβ 是最大切应力所在平面上的正应力
m
代入(7-10)得:
0, 0
(7-11a)
d
dt
0 d
0
d
dt
0 d
0
(7-11b)
取滑移线为坐标系
速度,故在速度平面的速度矢端曲线分别归缩为一个点,其速端图如图所示。
a)速度间断直线
b)速端图
图7-22 速度间断直线及其速端图
金属塑性成形原理
(2)滑移线ab为速度间断曲线,两侧分别为刚性区与塑性区 刚性区一侧在速度平面上的速度矢端曲线归缩为一点,而塑性区一侧
第七章 滑移线场理论与简介作业题答案
4/5
所以单位挤压力 p 速端图如右图所示:
P 。 K (1 ) (负号表示受压) HL 2
D 0
v0
O左
v1
O右
4
4
B M
由速端图可知 v1 2v0
O上
F
N
5/5
第七章 滑移线场理论与简介作业题答案
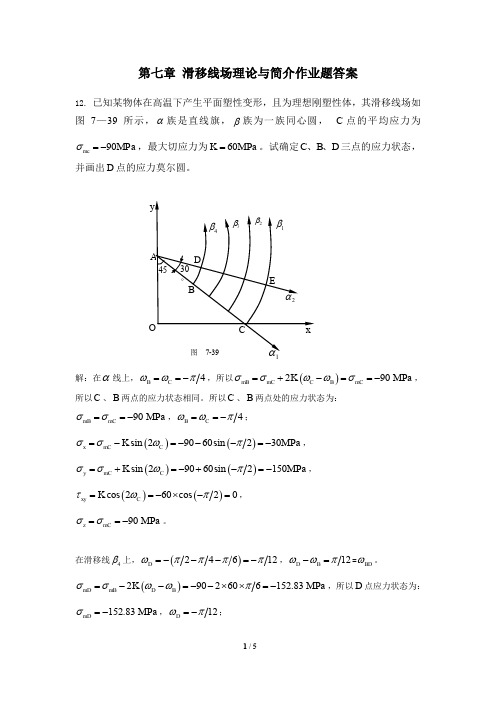
12. 已知某物体在高温下产生平面塑性变形,且为理想刚塑性体,其滑移线场如
图 7 — 39 所示, 族是直线旗, 族为一族同心圆, C 点的平均应力为
mc 90MPa ,最大切应力为 K 60MPa 。试确定 C、B、D 三点的应力状态,
并画出 D 点的应力莫尔圆。
对于滑移线 OFB 上的一点,设其方向 角为 ( 4 3 4 ) ,其平均应力为
m mB 2K ( B ) K (1 ) 2K ( 4) K (2 3 2 1)
因此,沿 x 方向的应力分量为
ቤተ መጻሕፍቲ ባይዱ
x m K sin 2 K (2 3 2 1) K sin 2
p
2b
b
a
在族滑移线场中任意取出一条滑移线 ab ,使其 a 点在接触面上, b 点处在已知应力 状态的自由表面上。 a, b 两点应力状态如下图所示:
2/5
p
3
3 4
4
1
a 点处应力状态
b 点处应力状态
根据判断滑移线线族性的规则,可以确定滑移线 ab 为 线。 在 a 点: a 所以
H 2h
C D
45 °
F
O
v0
材料成型原理 名词解释
滑移线场:当方形压头加载于均质、各向同性的塑性材料(土壤)时,最大剪应力轨迹在材料中的空间分布称为滑移线场。
滑移线场实际上就是一个剪切构造网络真实应力:拉伸(或压缩)试验时,变形力与当时实际截面积(而不是初始截面积)之比。
其数值是随变形量、温度与应变速率而变化的。
理想塑性:材料在常应力并不显示加工硬化,而只做塑性流动应力球张量:由一点处三个线应变(见应变)的平均应变所组成的应变张量。
金属充型能力:液态金属充满铸型型腔,获得尺寸精确、轮廓清晰的成型件的能力。
金属材料的焊接性:—定焊接技术条件下,获得优质焊接接头的难易程度,即金属材料对焊接加工的适应性称为金属材料的焊接性平衡凝固:指凝固过程中的每个阶段都能达到平衡,即在相变过程中有充分时间进行组元间的扩散,以达到平衡相的成分。
偏析:合金中各组成元素在结晶时分布不均匀的现象称为偏析滑移线:在塑性力学中,变形体塑变区最大切应力的迹线。
冷变形:在再结晶温度以下(通常是指室温)的变形。
热变形:在再结晶温度以上的变形。
温变形:在再结晶温度以下,高于室温的变形熔渣的碱度焊接熔渣中碱性氧化物质量分数的总和与酸性氧化物质量分数总和的比值,叫焊接熔渣的碱度焊接热循环:在焊接热源作用下,焊件上某点的温度随时间变化的过程。
简单加载:加载过程中各应力分量按同一比例单调增长,应力主轴方向固定不变应力偏张量:应力偏张量是塑性变形时物体内一点的应力张量的分量随坐标变化而改变,但其应力张量不变量却是固定不变的,因此应力张量不变量可以反映物体变形状态的实质。
溶质再分配系数:凝固过程中固-液界面固相侧溶质质量分数与液相中溶质质量分数之比,称为溶质再分配系数。
焊接热影响区:在焊接热循环作用下,焊缝两侧处于固态的母材发生明显的组织和性能变化的区域,称为焊接热影响区。
最小阻力定律:塑性变形体内有可能沿不同方向流动的质点只选择阻力最小方向流动的规律。
超塑性:是指材料在一定的内部条件和外部条件下,呈现出异常低的流变抗力、异常高的流变性能的现象。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
换言之:同一族上的两条滑移线与另一族的任一 条滑移线相交,在两点处切线间的夹角与平均应 力的变化均为常数 若单元网格上的三个节点上的值 m , 为已知, 则第四个节点上的 m , 即可求出
推论:若一族的一条滑移线的某一 区段为直线段,则被另一族滑移线 所截得的该滑移线的所有相应线段 皆为直线
第七章 滑移线场理论 简介
第一节 塑性平面应变状态下的应力莫尔 圆与物理平面
平面应变时,独立的应力 分量为 x 、 y 和 xy 。
z 2
x y
2
1 1 m 2 ( 1 3 ) z ( x y ) 2 2
应力莫尔圆中大圆的圆心 为( m ,0),半径为
建立滑移线场从已知的边界条件开始 已知两相交滑移线OA和OB,作出该两条滑 移线所包围的塑性区OACB内的滑移线场
滑移线场的节点编号是用一有序数组(m, n)表示,其中m为 线的序号,n为β 线 的序号
第四节 滑移线场的速度场理论
据滑移线场的几何性质和给定的应力边界条件,就可以做
但是这样求得的应力解,仅是满足了静力许可条件,是否
一族滑移线与表面相切,另一族与之正交
σn= σm
摩擦切应力为 K的接触面
σn= σm
摩擦切应力为 K的接触面
α
0 β α α σm σ3 σ3 K β β
0
σm K σ1 α
σ1 K β σm
K
σm 0 K
σm
代数值最大的 σm 主应力σ1的作用线
σ1
0
K σm
K
σ3
σm
K
σ1
σ3
摩擦切应力为K的接触表面的滑移线
x y 1 2 R K (1 3 ) xy 2 2
2
1 m k 2 m 3 m k
x m k sin 2 y m k sin 2 xy k cos 2
x y tan 2 2 xy
二、滑移线场的建立
1、塑性区的应力边界条件
常见的应力边界条件有以下四种类型 (1)不受力的自由表面
1 2 K , 3 0 1 0, 3 2 K
x m k sin 2 y m k sin 2 xy k cos 2
β
自由表面处的滑移线
1 0, 3 2K
(2)无摩擦的接触表面
τ=0
4
σ3
无摩擦的接触表面
0 β
4
xy 0
与不受力的接触表面一样
α β
σm σ1
σ3 K K
σm
σ1
代数值最大的 主应力σ1的作用线
0 σm K K σ3
σm α
无摩擦接触表面处的滑移线
(3)摩擦力为K的接触表面 cos 2 1 0或 /2 xy K
1 2K 3 2K p;
ma
1 ( 1 3 ) K p 2
根据亨盖应力方程
ma mb 2K
K p ( K ) 2 K ( p 2 K (1
) 4 4
2
)
平面变形挤压
平面变形挤压:挤压 前后的宽度不变。挤 压的程度用挤压前后 的面积比来表示,称 为挤压比。对于平面 变形挤压,可由挤压 前后料厚度之比表示。
8.75时,达到了极限状态, p/(2K)不再随
普朗特场
1 0 2
希尔场
20
根据判断滑移线族性质的规则,可确定滑移线ab为 在b点 根据屈服准则
b
4
线
, 1 0;
1 3 2K ;
3 2K ;
1 mb ( 1 3 ) K 2 在a点 a , 3 p; 4 根据屈服准则 1 3 2K ;
若滑移线为直线,则此直线上各点的应力状态相同
若两族滑移线均为直线,则此区域内各点的应力状 态相同,称为均匀应力场
2、亨盖第一定理
同一族的一条滑移线转 到另一条滑移线时,则 沿另一族的任一条滑移 线方向角的变化 及 m 均 平均应力的变化 为常数
1,1 2,1 1,2 2,2 常数 m m1,1 m 2,1 m1,2 m 2,2 常数
锻压时的滑移线场
无摩擦条件下平面应变压入时的滑移线场 (a)b=h (b)b=2h(3) b<h(1<h/b<8.75)
锻压时的滑移线场
b=nh (其中n 1) 时的滑移线场属于薄件压缩,当 n=1,2,……为整数时,沿每一边交界面各有n个均 匀场。
p /(2K ) 1
b<h 当b<h时,存在扇形场和曲线滑移场,随着 h/b的增大,扇形场和曲线滑移场扩大,p/(2K)随 之增加,这是厚件压缩的特征。
一、滑移线场的主要特性
根据平面塑性应变状态的特点,可知其应力分量 完全可用 m 和K来表示。而K为材料常数,故只要能 找到沿滑移线上的 m 的变化规律,即可求得整个变形 体(或变形区)的应力分布。这就是应用滑移线法求 解平面塑性变形问题的实质。
1、亨盖应力方程
亨盖应力方程给出了滑移线场内质点平均应力 的变化与滑移线转角 ω 的关系式。
出滑移线场,然后根据亨盖的应力方程可得应力解。
满足运动许可条件,并未得到证明。滑移线场的解应该同时 满足静力许可条件和运动许可两方面的条件。
对于塑性加工问题,其边界条件往往不是单一的而是混合
的,即在一部分边界上给定了应力,而在另一部分边界上给 定了速度,在这种情况下,除了要要应用亨盖应力方程外,
y
第二节 滑移线与滑移线场的基本概念
塑性区内每点的应力状态可用平均应力 m 和最大切应力 K 表示,每点的切应力都是成双存在、互等且互相垂直的。 将塑性区内每点的最大切应力方向连接起来,得到两族相 互正交的曲线,称为滑移线,滑移线所遍及的整个塑性区构 成的场,称为滑移线场。
第一主方向顺时针转 / 4 所得的滑移线为 线 线两旁的最大剪应力 组成顺时针方向
σ1方向(第一主方向)
K
K
σ3方向
4
σ3方向 σ1方向
K
K
α
σ1 K K
β
σ1
K
判断σ1、σ3方向 判断变化趋势
β
确定滑移线族别
4
α
按最大切应力K的时针转向或按第一主方向确定滑移线族别
滑移线的微分方程
线
dy tg dx
线
dy tg ( ) ctg dx 2
第三节 滑移线场的应力场理论
还需要建立速度方程。
速度间断
若塑性区与刚性区之间或塑性区内相邻两区 之间可能有相对滑动,即速度发生跳跃,此 现象称速度不连续,或称速度间断。 由于材料的连续性和不可压缩的要求,速度 间断线两侧的法向速度分量必须相等,否则 将出现裂缝或者重叠,而切向分量可以产生 间断。 速度间断线必定是滑移线。 沿同一条滑移线的速度间断值为常数。
(4)摩擦力为某一中间值的接触表面
0 xy K
xy
0
1 1 xy cos 2 K
y
r
y
y
m
K
xy
m
K
321Fra bibliotek xy0
x
xy
K K
xy
x
x
a
m
x
m
m
y
xy
a)
b)
摩擦切应力为某一中间值的接触面处的滑移线
沿同一条滑移线的速度间断值为常数,其方 向随滑移线而改变
dv v d 0
1 1
dv v d 0
2 2
v v
1
2
dv dv
1
2
v v v 常数
1 2
第五节 滑移线场理论在塑性成形中的 应用举例
应用滑移线理论求解塑性成型问题,其 本质就是根据应力边界条件求解滑移线场和 应力状态,并根据速度边界条件求出和滑移 线场相匹配的速度场以进行校核。
m 2k 沿线 m 2k 沿 线
, 在同一条滑移线上为常数
ma mb 2k (a b ) 正号用于 线,负号 线
ma mb 2k (a b )
若滑移线场已经确定,且已知一条滑移线上任一点 的平均应力,则可确定该滑移线上各点的应力状态
xy 0
cos 2 0
4
4
τ=0 β
自由表面 α β
τ=0
4
4
自由表面 β
4
α σm K K σm
σm
K
K
σm
σ1
σm K K
σ1=2K
代数值最大的 主应力σ1的作用线
σ3
σm K K
σ3=-2K
σm
σm
α
α
1 2 K , 3 0
代数值最大的主应力 σ1(=0)的作用线
平冲头压入半无限高坯料
当h/b
h/b而增大,这是由于此时的塑性变形区不能渗透到 水平轴上,仅能产生在接触表面附近的一定区域内, h/b的增大对塑性变形区不再产生影响,我们把这种 压缩称为平板压入半无限体( h/b >10)。 在自由锻造中,剁刀切断大型钢坯或用压铁在大锻 件上局部压入等锻造工步中,由于钢坯尺寸很大、 且剁刀与压铁的长度远大于宽度,金属变形状态与 平冲头压入半无限体内的问题相近,可以认为是平 面应变状态。