机器人程序框架说明
机器人操作系统的开源框架介绍

机器人操作系统的开源框架介绍机器人操作系统(Robot Operating System,ROS)是一个开源的框架,用于构建机器人软件系统。
它提供了一组工具和库,用于帮助开发者快速构建、测试和部署机器人应用程序。
本文将详细介绍几个常用的ROS开源框架,包括ROS核心、ROS通信库、ROS感知库和ROS控制库,并探讨它们在机器人操作系统中的作用和优势。
一、ROS核心ROS核心提供了一系列用于构建和管理机器人软件的基础功能。
其中包括ROS Master,作为ROS节点之间的中央协调者,负责管理节点之间的通信。
此外,ROS还提供了包管理工具ROS Package,用于管理、组织和共享代码。
ROS的核心架构基于节点(Node)的概念,每个节点代表一个独立的进程,可以通过ROS Master进行通信。
开发者可以使用不同语言(如C++、Python等)编写节点,并将它们组合成复杂的机器人系统。
二、ROS通信库ROS通信库提供了节点之间进行消息传递的机制。
它定义了一套通用的消息格式和服务类型,让不同节点之间能够进行高效地数据交换和调用。
常用的ROS通信库包括roscpp和rospy。
roscpp是ROS的C++通信库,提供了一系列的API,用于创建和管理ROS节点、发布和订阅消息、调用服务等。
而rospy则是ROS的Python通信库,它同样提供了类似的功能,使开发者可以选择更为灵活的编程方式。
三、ROS感知库ROS感知库提供了一系列的工具和算法,用于机器人的感知能力,包括图像处理、激光扫描和目标识别等。
开发者可以利用这些库来构建各种感知应用,如视觉导航、目标跟踪等。
其中,常用的ROS感知库包括OpenCV和PCL。
OpenCV是一个广泛应用于计算机视觉领域的库,提供了各种图像处理和计算机视觉算法。
PCL(点云库)是一个用于处理三维点云数据的库,可用于机器人的环境感知和建图。
四、ROS控制库ROS控制库提供了机器人运动控制方面的工具和算法,包括运动规划、轨迹控制和运动学模型等。
epson机械手程序讲解
epson机械手程序讲解Epson机械手是一种工业机器人,通常用于自动化生产线上的装配、搬运和加工等任务。
它们可以根据预先设定的程序执行各种复杂的动作,从而提高生产效率和质量。
下面我将从不同角度讲解Epson机械手的程序。
首先,Epson机械手的程序可以通过专门的机器人编程软件进行编写和编辑。
这些软件通常提供了图形化的用户界面,使操作人员可以直观地创建机器人动作序列,设置运动路径、速度、加减速度和姿态等参数。
此外,一些软件还支持基于模拟的程序验证,以确保程序的准确性和安全性。
其次,Epson机械手的程序通常包括了各种运动指令、逻辑控制和传感器反馈等元素。
例如,可以通过编程指定机械手的起始位置、目标位置和中间路径,还可以添加逻辑判断,使机械手根据不同的情况执行不同的动作,同时还可以集成传感器反馈,实现对工件位置、质量等信息的实时监测和响应。
此外,Epson机械手的程序还可以与其他设备进行接口和通讯,实现自动化生产线的协调作业。
通过编写程序,可以实现机械手与输送带、加工设备、检测设备等的联动操作,从而实现整个生产过程的自动化控制和优化。
最后,Epson机械手的程序还需要考虑安全性、稳定性和可维护性等方面。
在编写程序时,需要充分考虑机械手在工作过程中的安全保护措施,避免发生意外伤害。
同时,还需要考虑程序的稳定性和可维护性,确保程序的稳定运行和便于日常维护和升级。
总的来说,Epson机械手的程序编写涉及到多个方面,包括机器人编程软件的使用、运动控制、逻辑控制、传感器接口、设备通讯、安全性和稳定性等。
通过合理的程序设计和编写,可以充分发挥Epson机械手在自动化生产中的作用,提高生产效率和质量。
第4章KUKA机器人编程ppt课件

篮 球 比 赛 是 根据运 动队在 规定的 比赛时 间里得 分多少 来决定 胜负的 ,因此 ,篮球 比赛的 计时计 分系统 是一种 得分类 型的系 统
第 4 章 KUKA机器人 编程
4.1.2 创建程序流程图
程序流程图的作用
1)用于程序流程结构化的工具。 2)程序流程更加易读。 3)结构错误更加易于识别。 4)同时生成程序的文献。
第 4 章 KUKA机器人 编程
子程序
在KUKA机器人编程过程中,可将程序中需要多次使用而不 需发生变化的可独立程序段单独建立为子程序,可避免程序 码重复,节省存储空间,使程序结构化,分解总任务,方便 排除程序错误。
子程序示例:
DEF MAIN() INI LOOP
GET_PEN() PAINT_PATH() PEN_BACK() GET_PLATE() GLUE_PLATE() PLATE_BACK() IF $IN[1] THEN
DEF PICK_CUBE() ;该程序将方块从库中取出 ;作者:Max Mustermann ;创建日期:2016.01.03 INI … END
篮 球 比 赛 是 根据运 动队在 规定的 比赛时 间里得 分多少 来决定 胜负的 ,因此 ,篮球 比赛的 计时计 分系统 是一种 得分类 型的系 统
篮 球 比 赛 是 根据运 动队在 规定的 比赛时 间里得 分多少 来决定 胜负的 ,因此 ,篮球 比赛的 计时计 分系统 是一种 得分类 型的系 统
第 4 章 KUKA机器人 编程
1)FOLD通常在创建后首先显示成关闭状态:
DEF Main()
…
INI
;KUKA FOLD 关闭
SET_EA
一文看懂RPA的技术架构及原理

一文瞧懂RPA的技术架构及原理众所周知,作为一款软件或平台,RPA(机器人流程自动化)就是用来替代人类员工实施基于规则的高度重复性工作的程序,而非实体存在的流程处理机器。
但由于它的新颖性,许多人可能会对RPA及其构成感到困惑。
典型的RPA平台至少会包含开发、运行、控制等三个组成部分。
RPA三件套•开发工具开发工具主要用于建立软件机器人的配置或设计机器人。
通过开发工具,开发者可以为机器人执行一系列的指令与决策逻辑进行编程。
就像雇佣新员工一样,新创建的机器人对公司的业务或流程将会一无所知。
这就需要我们在业务流程上培训机器人,然后才能发挥出其特有的功能,提高工作效率。
大多数开发工具为了进行商业发展,通常需要开发人员具备相应的编程知识储备,如循环、变量赋值等。
不过,好消息就是,目前大多数RPA软件代码相对较低,使得一些没有IT背景但训练有素的用户也能快速学习与使用。
开发工具里还包括——记录仪:也称之为“录屏”,用以配置软件机器人。
就像Excel中的宏功能,记录仪可以记录用户界面(UI)里发生的每一次鼠标动作与键盘输入。
插件/扩展:为了让配置的运行软件机器人变得简单,大多数平台都提供许多插件与扩展应用。
可视化流程图:一些RPA厂商为方便开发者更好地操作RPA开发平台,会推出流程图可视化操作。
比如UiBot开发平台就包含三种视图,流程视图、可视化视图、源码视图,分别对应不同用户的需求。
•运行工具当开发工作完成后,用户可使用该工具,来运行已有软件机器人,也可以查阅运行结果。
•控制中心主要用于软件机器人的部署与管理。
包括开始/停止机器人的运行,为机器人制作日程表,维护与发布代码,重新部署机器人的不同任务,管理许可证与凭证等。
当需要在多台PC上运行软件机器人的时候,也可以用控制器对这些机器人进行集中控制,比如统一分发流程,统一设定启动条件等。
RPA机器人的工作流程●流程开发及配置:开发人员制定详细的指令并将她们发布到机器上,具体包括应用配置、数据输入、验证客户端文件、创建测试数据、数据加载以及生成报告。
ros完整的使用流程
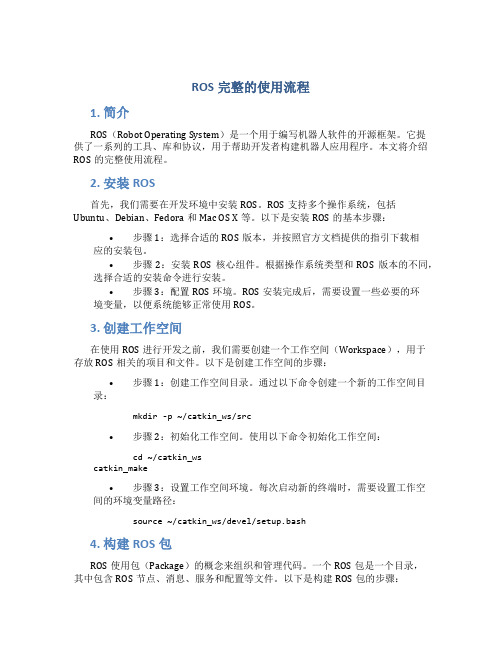
ROS完整的使用流程1. 简介ROS(Robot Operating System)是一个用于编写机器人软件的开源框架。
它提供了一系列的工具、库和协议,用于帮助开发者构建机器人应用程序。
本文将介绍ROS的完整使用流程。
2. 安装ROS首先,我们需要在开发环境中安装ROS。
ROS支持多个操作系统,包括Ubuntu、Debian、Fedora和Mac OS X等。
以下是安装ROS的基本步骤:•步骤1:选择合适的ROS版本,并按照官方文档提供的指引下载相应的安装包。
•步骤2:安装ROS核心组件。
根据操作系统类型和ROS版本的不同,选择合适的安装命令进行安装。
•步骤3:配置ROS环境。
ROS安装完成后,需要设置一些必要的环境变量,以便系统能够正常使用ROS。
3. 创建工作空间在使用ROS进行开发之前,我们需要创建一个工作空间(Workspace),用于存放ROS相关的项目和文件。
以下是创建工作空间的步骤:•步骤1:创建工作空间目录。
通过以下命令创建一个新的工作空间目录:mkdir -p ~/catkin_ws/src•步骤2:初始化工作空间。
使用以下命令初始化工作空间:cd ~/catkin_wscatkin_make•步骤3:设置工作空间环境。
每次启动新的终端时,需要设置工作空间的环境变量路径:source ~/catkin_ws/devel/setup.bash4. 构建ROS包ROS使用包(Package)的概念来组织和管理代码。
一个ROS包是一个目录,其中包含ROS节点、消息、服务和配置等文件。
以下是构建ROS包的步骤:•步骤1:进入工作空间的src目录,使用以下命令创建一个新的包:cd ~/catkin_ws/srccatkin_create_pkg my_package rospy std_msgs•步骤2:在包中添加源代码。
将编写的ROS节点脚本或其他源代码复制到包的src目录中。
•步骤3:构建包。
乐博士刷卡机器人搭建手册

乐博士刷卡机器人搭建手册摘要:1.乐博士刷卡机器人简介2.搭建乐博士刷卡机器人所需材料3.搭建步骤3.1 准备工具和材料3.2 组装机器人框架3.3 安装电路板和电机驱动器3.4 连接电源和电池3.5 安装传感器和执行器3.6 编写程序和测试4.搭建注意事项5.结论正文:一、乐博士刷卡机器人简介乐博士刷卡机器人是一款集趣味性、教育性和实用性于一体的机器人。
它可以通过刷卡进行简单的指令操作,实现前进、后退、左转、右转等动作。
此外,还可以通过编程实现更多复杂的功能。
这款机器人适合编程初学者、机器人爱好者以及青少年学生使用,可以帮助他们学习编程知识、培养动手能力和提高创新意识。
二、搭建乐博士刷卡机器人所需材料1.乐博士刷卡机器人套件2.镊子、螺丝刀等工具3.5V 电源和电池4.Arduino 编程板和数据线5.电机驱动器和步进电机6.传感器(如红外传感器、超声波传感器等)7.执行器(如直流电机、伺服电机等)8.面包板和杜邦线9.相关电子元件(如电阻、电容等)三、搭建步骤3.1 准备工具和材料在搭建乐博士刷卡机器人之前,首先需要准备好所需的工具和材料,如镊子、螺丝刀等工具,以及乐博士刷卡机器人套件、电源、电池等。
3.2 组装机器人框架将乐博士刷卡机器人套件中的各种零部件按照图纸进行组装,注意要确保各个连接处的螺丝紧固。
组装完成后,机器人框架应该稳定且牢固。
3.3 安装电路板和电机驱动器将Arduino 编程板和电机驱动器安装到机器人框架上,确保它们之间的连接稳定可靠。
同时,将电源和电池连接到电路板上,为机器人提供电源。
3.4 连接电源和电池将电源和电池连接到电路板上,为机器人提供电源。
注意要确保电源线连接牢固,防止接触不良。
3.5 安装传感器和执行器根据需要,安装红外传感器、超声波传感器等传感器,以及直流电机、伺服电机等执行器。
将它们与Arduino 编程板和电机驱动器相连接,确保连接稳定可靠。
3.6 编写程序和测试使用Arduino 编程语言编写程序,实现刷卡机器人的基本功能。
ros 教学大纲

ROS(机器人操作系统)教学大纲导言本教学大纲旨在引导学习者了解ROS(机器人操作系统)的基本概念、原理和使用方法。
ROS是一个灵活、模块化的开源软件框架,被广泛应用于机器人研究和开发。
通过学习ROS,学习者可以掌握机器人软件开发的基本技能,并且能够快速构建机器人应用程序。
一、ROS基础知识1.什么是ROS?–ROS定义:ROS是一种机器人软件开发框架,它提供了一系列工具、库和约定,用于简化机器人软件开发过程。
–ROS的特点:模块化、工具丰富、易于扩展、跨平台、开源社区支持。
2.ROS的核心概念–节点(Node):ROS程序的最小执行单元。
–主题(Topic):节点之间进行信息传递的通道。
–消息(Message):在主题中传递的数据类型定义。
–服务(Service):节点之间进行请求和响应的机制。
–参数(Parameter):节点之间共享的配置信息。
二、ROS安装与配置1.安装ROS–安装步骤(根据不同操作系统版本)–ROS版本选择与兼容性考虑2.基本配置–设置ROS环境变量–创建工作空间(workspace)–创建与配置ROS包(package)三、ROS基本操作1.创建ROS包和节点–创建ROS包–创建ROS节点–编写ROS节点(包括发布者和订阅者)2.使用ROS工具–roscore:启动ROS核心服务–roslaunch:启动ROS程序–rosrun:执行ROS节点–rostopic:查看和发布主题信息–rosservice:查看和调用服务信息3.ROS消息通信–创建和定义自定义消息类型–发布和订阅消息–消息过滤与转换四、ROS进阶使用1.ROS插件与库的应用–RViz:可视化工具–Gazebo:物理仿真环境–MoveIt!:机器人运动规划–Rqt:ROS图形界面插件2.ROS软件开发实践–代码管理与版本控制–调试ROS程序–ROS单元测试–优化与性能调试3.ROS与外部设备连接–连接传感器和执行器–使用ROS控制硬件–外部设备驱动开发五、ROS应用实例1.ROS在移动机器人中的应用–建图与导航–避障和路径规划–自主控制与任务执行2.ROS在机械臂控制中的应用–运动规划与轨迹控制–物体抓取与放置–协作操作与任务规划3.ROS与视觉处理的结合–图像处理与识别–视觉定位与跟踪–目标检测与识别六、ROS开发与社区资源1.ROS开发工具–ROS Development Studio(ROSDS)–ROS Industrial–ROS Packages索引2.ROS社区与资源–ROS Answers:问答社区–ROS Wiki:官方文档–ROS Packages:用户共享包–ROS Discourse:讨论论坛以上为ROS教学大纲的范例,通过学习该大纲,学习者可以了解ROS的基础知识、安装与配置、基本操作、进阶使用、应用实例以及开发与社区资源。
机器人编程操作说明书

机器人编程操作说明书1. 简介机器人是一种自动执行特定任务的设备,它能够通过编程来实现各种操作。
本操作说明书将为您提供机器人编程的详细指导,帮助您了解机器人的操作流程和编程技巧。
2. 准备工作在开始机器人编程之前,确保以下准备工作已完成:- 确认机器人已正确连接电源,并保持在正常工作状态。
- 确保机器人所需的传感器和执行器已正确安装并连接到控制器。
- 请提前安装好机器人编程软件,并确保其与机器人的连接正常。
3. 编程环境设置首先,打开机器人编程软件,并按照以下步骤进行环境设置:步骤一:选择正确的机器人型号和版本。
步骤二:根据机器人的连接方式,选择正确的通信接口(如串口、以太网等)。
步骤三:确认机器人与编程软件的连接正常。
步骤四:设置编程环境的其他参数(如编程语言、编码格式等)。
4. 编程流程机器人编程的基本流程如下:步骤一:定义任务目标和需求。
明确机器人需要完成的任务,并分析其具体需求。
步骤二:设计程序框架。
根据任务目标和需求,设计一个合适的程序框架,确定程序的主要结构和逻辑。
步骤三:编写程序代码。
根据程序框架,使用机器人编程软件编写相应的程序代码,实现机器人的动作和控制。
步骤四:调试和优化。
在编写完成后,对程序进行调试和优化,确保程序能够正常运行并达到预期效果。
5. 编程技巧以下是一些常用的机器人编程技巧,供您参考:- 使用合适的传感器:根据任务需求选择适合的传感器,用于感知环境和获取相关数据。
- 控制器的配置:根据机器人的特性和任务需求,对控制器进行适当的配置和参数调整。
- 逻辑控制语句:使用各种逻辑控制语句(如条件语句、循环语句等)实现复杂的控制逻辑。
- 函数调用和模块化编程:使用函数和模块化编程的方法,提高程序的可读性和可维护性。
- 编写注释:对于复杂的程序代码,编写清晰明了的注释,方便他人理解和维护。
6. 错误处理和故障排除在机器人编程过程中,可能会出现一些错误和故障。
以下是一些常见的问题及其排除方法:- 语法错误:请仔细检查程序代码中的语法是否正确,并根据编译器的提示进行修改。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
ABB机器人程序框架说明(海南马自达HMC7180焊装线项目)1.基本信号表2.机器人程序框架及说明基本信号表ABB与福臻信号对接图(Under)运行时序图DI_AutomodeDI_StartWeldDI_ShuttleRunDO_InSafeAreaDO_RobInConvDO_FinishWeld程序运行时信号变化如下所示:DI_Automode, DO_Automode总是为1,DI_Estop, DO_EStop 总是为0循环开始前,DI_StartWeld=0,DO_InSafeArea=1,DO_FinishWeld=0,DO_RobInConv=0,开始焊接时,DI_StartWeld=1 →DO_InSafeArea=0,DO_RobInConv=1 →焊接工作→DO_FinishWeld=1 →DI_StartWeld=0 →DO_FinishWeld=0 →DO_RobInConv=0, DO_InSafeArea=1 →下一次循环运行时序图DI_AutomodeDI_StartWeld1DI_StartWeld2DI_ShuttleRunDO_InSafeAreaDO_RobInConvDO_FinishWeld1DO_FinishWeld2程序运行时信号变化如下所示:DI_Automode, DO_Automode总是为1,DI_Estop, DO_EStop 总是为0循环开始前,DI_StartWeld=0,DO_InSafeArea=1,DO_FinishWeld=0,DO_RobInConv=0,开始焊接时,DI_StartWeld=1 →DO_InSafeArea=0,DO_RobInConv=1 →焊接工作 1 →DO_FinishWeld1=1 → DI_StartWeld1=0 → DO_FinishWeld1=0 → DI_StartWeld2=1 →焊接工作2 → DO_FinishWeld2=1 → DI_StartWeld2=0 → DO_FinishWeld2=0 → DO_RobInConv=0, DO_InSafeArea=1 →下一次循环运行时序图DI_AutomodeDI_StartWeldDI_ShuttleRunDO_InSafeAreaDO_RobInConvDO_FinishWeld程序运行时信号变化如下所示:DI_Automode, DO_Automode总是为1,DI_Estop, DO_EStop 总是为0循环开始前,DI_StartWeld=0,DO_InSafeArea=1,DO_FinishWeld=0,DO_RobInConv=0,开始焊接时,DI_StartWeld=1 →DO_InSafeArea=0,DO_RobInConv=1 →焊接工作→DO_FinishWeld=1 →DI_StartWeld=0 →DO_FinishWeld=0 →DO_RobInConv=0, DO_InSafeArea=1 →下一次循环运行时序图DI_AutomodeDI_StartWeld1DI_StartWeld2DI_ShuttleRunDO_InSafeAreaDO_RobInConvDO_FinishWeld1DO_FinishWeld2在2个焊接循环之间执行放料DI_LoadRqDI_PartReadyDO_PutdownOver程序运行时信号变化如下所示:DI_Automode, DO_Automode总是为1,DI_Estop, DO_EStop 总是为0循环开始前,DI_StartWeld=0,DO_InSafeArea=1,DO_FinishWeld=0,DO_RobInConv=0,开始焊接时,DI_StartWeld=1 →DO_InSafeArea=0,DO_RobInConv=1 →焊接工作 1 →DO_FinishWeld1=1 → DI_StartWeld1=0 → DO_FinishWeld1=0 → DI_StartWeld2=1 →焊接工作2 → DO_FinishWeld2=1 → DI_StartWeld2=0 → DO_FinishWeld2=0 → DO_RobInConv=0, DO_InSafeArea=1 →下一次循环放料时信号变化如下所示:DI_LoadRq=1 →机器人取料放料→DI_PartReady=1 →DO_PutdownOver=1 →DI_PartReady=0, DI_LoadRq=0 → DO_PutdownOver=0 →进入焊接循环运行时序图DI_AutomodeDI_StartWeldDI_ShuttleRunDO_InSafeAreaDO_RobInConvDO_FinishWeld程序运行时信号变化如下所示:DI_Automode, DO_Automode总是为1,DI_Estop, DO_EStop 总是为0循环开始前,DI_StartWeld=0,DO_InSafeArea=1,DO_FinishWeld=0,DO_RobInConv=0,开始焊接时,DI_StartWeld=1 →DO_InSafeArea=0,DO_RobInConv=1 →焊接工作→DO_FinishWeld=1 →DI_StartWeld=0 →DO_FinishWeld=0 →DO_RobInConv=0, DO_InSafeArea=1 →下一次循环备注:机器人2个输出为自动输出,在机器人系统内将此2个信号挂在系统输出上。
DO_Estop EstopDO_Automode AutoOnProfibus 配置Base17outputs 16inputs 1wordsABB与福臻信号对接图(Main/Arc/Measure)Main_R1 (Address: 61) & Main_R2 (Address: 62)运行时序图DI_AutomodeDI_StartWeld1DI_StartWeld2DI_StartWeld3DI_ShuttleRunDO_InSafeAreaDO_RobInConvDO_FinishWeld1DO_FinishWeld2DO_FinishWeld3程序运行时信号变化如下所示:DI_Automode, DO_Automode总是为1,DI_Estop, DO_EStop 总是为0循环开始前,DI_StartWeld=0,DO_InSafeArea=1,DO_FinishWeld=0,DO_RobInConv=0,开始焊接时,DI_StartWeld1=1 →DO_InSafeArea=0,DO_RobInConv=1 →焊接工作 1 →DO_FinishWeld1=1 → DI_StartWeld1=0 → DO_FinishWeld1=0 →吊具下降,DI_StartWeld2=1 →焊接工作2 →DO_FinishWeld2=1 →DI_StartWeld2=0 →DO_FinishWeld2=0 →吊具上升,DI_StartWeld3=1 →焊接工作 3 →DO_FinishWeld3=1 →DI_StartWeld3=0 →DO_FinishWeld3=0 → DO_RobInConv=0, DO_InSafeArea=1 →下一次循环Main_R5 (Address: 65) & Main_R6 (Address: 66)机器人7,8运行时序图DI_AutomodeDI_StartWeld1DI_StartWeld2DI_StartWeld3DI_ShuttleRunDO_InSafeAreaDO_RobInConvDO_FinishWeld1DO_FinishWeld2DO_FinishWeld3机器人5,6运行时序图DI_AutomodeDI_StartWeld1DI_ShuttleRunDO_InSafeAreaDO_RobInConvDO_FinishWeld1机器人7,8程序运行时信号变化如下所示:DI_Automode, DO_Automode总是为1,DI_Estop, DO_EStop 总是为0循环开始前,DI_StartWeld=0,DO_InSafeArea=1,DO_FinishWeld=0,DO_RobInConv=0,开始焊接时,DI_StartWeld=1 →DO_InSafeArea=0,DO_RobInConv=1 →焊接工作 1 →DO_FinishWeld1=1 → DI_StartWeld1=0 → DO_FinishWeld1=0 →吊具下降,DI_StartWeld2=1 →焊接工作2 →DO_FinishWeld2=1 →DI_StartWeld2=0 →DO_FinishWeld2=0 →吊具上升,DI_StartWeld3=1 →焊接工作 3 →DO_FinishWeld3=1 →DI_StartWeld3=0 →DO_FinishWeld3=0 → DO_RobInConv=0, DO_InSafeArea=1 →下一次循环机器人7,8放料时信号变化如下所示:DI_LoadRq=1 →机器人取料放料→DI_PartReady=1 →DO_PutdownOver=1 →DI_PartReady=0, DI_LoadRq=0 → DO_PutdownOver=0 →进入焊接循环机器人5,6程序运行时信号变化如下所示:DI_Automode, DO_Automode总是为1,DI_Estop, DO_EStop 总是为0循环开始前,DI_StartWeld=0,DO_InSafeArea=1,DO_FinishWeld=0,DO_RobInConv=0,开始焊接时,DI_StartWeld=1 →DO_InSafeArea=0,DO_RobInConv=1 →焊接工作→DO_FinishWeld=1 →DI_StartWeld=0 →DO_FinishWeld=0 →DO_RobInConv=0, DO_InSafeArea=1 →下一次循环Arc_R1 (Address: 69) & Arc_R2 (Address: 70)运行时序图DI_AutomodeDI_StartWeldDI_ShuttleRunDO_InSafeAreaDO_RobInConvDO_FinishWeld程序运行时信号变化如下所示:DI_Automode, DO_Automode总是为1,DI_Estop, DO_EStop 总是为0循环开始前,DI_StartWeld=0,DO_InSafeArea=1,DO_FinishWeld=0,DO_RobInConv=0,开始焊接时,DI_StartWeld=1 →DO_InSafeArea=0,DO_RobInConv=1 →焊接工作→DO_FinishWeld=1 →DI_StartWeld=0 →DO_FinishWeld=0 →DO_RobInConv=0, DO_InSafeArea=1 →下一次循环运行时序图DI_AutomodeDI_StartWeldDI_ShuttleRunDO_InSafeAreaDO_RobInConvDO_FinishWeld程序运行时信号变化如下所示:DI_Automode, DO_Automode总是为1,DI_Estop, DO_EStop 总是为0循环开始前,DI_StartWeld=0,DO_InSafeArea=1,DO_FinishWeld=0,DO_RobInConv=0,开始焊接时,DI_StartWeld=1 →DO_InSafeArea=0,DO_RobInConv=1 →焊接工作→DO_FinishWeld=1 →DI_StartWeld=0 →DO_FinishWeld=0 →DO_RobInConv=0, DO_InSafeArea=1 →下一次循环运行时序图DI_AutomodeDI_StartMeasDI_ShuttleRunDO_InSafeAreaDO_RobInConvDO_FinishMeas程序运行时信号变化如下所示:DI_Automode, DO_Automode总是为1,DI_Estop, DO_EStop 总是为0循环开始前,DI_StartMeas=0,DO_InSafeArea=1,DO_FinishMeas=0,DO_RobInConv=0,开始焊接时,DI_StartMeas=1 →DO_InSafeArea=0,DO_RobInConv=1 →焊接工作→DO_FinishMeas=1 →DI_StartMeas=0 →DO_FinishMeas=0 →DO_RobInConv=0, DO_InSafeArea=1 →下一次循环机器人程序框架说明1.底板线U1,U2,U5,U6,U9,U10,车身线M9,M10机器人程序主程序结构:PROC main()!Mazda Under Line Robot1!Last Modified 5/27/2004 9:34PMInitAll;初始化WHILE TRUE DOIF Di_StartWeld=1 AND Di_AutoMode=1 AND Di_ShuttleRun=0 THEN 判断焊接条件是否成立SPOTWELD;进入焊接工序,包含与总线通讯ENDIFCycleCheck;循环检查ENDWHILEENDPROC主要子程序结构:初始化程序 InitAllPROC InitAll()WriteTP;在示教器上显示基本信息VelSet 100,2000;AccSet 70,70;速度加速度控制Movehome;机器人移至Home点TPErase;Reset DO_FinishWeld;Reset Do_RobInConv;初始化信号ClkStop Timer;ClkReset Timer;ENDPROC焊接工序子程序PROC SPOTWELD()ClkStart Timer;Reset DO_FinishWeld;MoveJ phome,vBig,z50,tc1\WObj:=rb1xu;!It's safe to run this routine from phome!especially in op-modeReset DO_InSafeArea;Set Do_RobInConv;进入焊接程序,复位安全信号MoveJ。