DSP复习资料
DSP 复习资料

DSP 复习资料:1、DSP(digital singnal processor)是一种独特的微处理器,是以数字信号来处理大量信息的器件。
其工作原理是对数字信号进行修改、删除、强化,并在其他系统芯片中把数字数据解译回模拟数据或实际环境格式。
它不仅具有可编程性,而且其实时运行速度可达每秒数以千万条复杂指令程序,远远超过通用微处理器,是数字化电子世界中日益重要的电脑芯片。
它的强大数据处理能力和高运行速度,是最值得称道的两大特色。
2、DSP芯片一般具有如下主要特点:在一个指令周期内可以完成一次乘法和一次加法;可以并行执行多个操作;快速的中断处理和硬件I/O支持;存储器采用哈佛结构;主要用于信号处理。
3、一个典型的DSP系统应包括抗混叠滤波器、数据采集A/D转换器、数字信号处理器DSP、D/A转换器和低通滤波器等组成。
4、按数据格式分为定点DSP和浮点DSP两类。
按数据的定点格式工作的DSP芯片称为定点DSP;按数据的浮点格式工作的DSP芯片称为浮点DSP。
其中C2x、C24x称为C2000系列,主要用于数字控制系统; C54x、C55x称为C5000系列,主要用于功耗低、便于携带的通信终端; C62x、C64x和C67x称为C6000系列,主要用于高性能复杂的通信系统,如移动通信基站。
5、链接命令文件(·cmd文件)指定存储器的结构和段的定位,有MEMORY和SECTIONS两条指令。
MEMORY伪指令用来定义目标系统的存储器配置空间,包括对存储器各部分命名,以及规定它们的起始地址和长度。
SECTIONS伪指令用来指定链接器将输入段组合成输出段方式,以及输出段在存储器中的位置,也可用于指定子段。
6、DSP系统中流水线操作是各指令以机器周期为单位相差一个时钟周期,连续并行工作的情况。
其本质是DSP多条总线彼此独立地同时工作,使得同一条指令在不同机器周期内占用不同总线资源。
同时,不同指令在同一机器周期内占用不同总线资源。
DSP复习资料

7、简答SARAM和DARAM的联系和区别
区别前者1个机器周期内只能被访问1次后者1个机器周期内能被访问2次,可同时进行读操作和写操作。
联系都可当数据存储器和程序存储器使用
第三章
1、数的定标是指定点DSP芯片处理小数时,由程序员来确定一“小数点”的位置。
SXM的中文名称是符号扩展模式位;当SXM=1时,设置符号扩展模式,即高24位扩展为符号位。用指令表示SSBXSXM;当SXM=0时,设置符号不扩展模式,即高24位用0填充;用指令表示RSBXSXM
4、DSP芯片的乘法运算,常需要用到舍入处理方法书上p47
方法是在低16位的最高位加1,然后将低16位清除,将高16位作为结果。(将该数加0.5,之后再将小数部分去除,即舍入处理方法,也称上取整。)
{*SWWSR=0X2000
}
(3)P108为什么要用volatile类型的数据?
答:对程序进行编译时,代码优化器会避免存储区访问而删除一些语句,为了保留这些语句,可以使用volatile关键字可确保编译器不会对这些变量进行优化。
3、P112申明一个函数是中断函数,要使用中断关键字interrupt(怎么考??)
5、简答C语言程序代码优化有几种方法?其中并行指令属于那种优化方法?并举一例并行指令
算法优化编译优化函数优化属于编译优化ST||LD特点:单字单周期
第六章
1、小题DSP的内部存储器类型可分为随机存取存储器(RAM)和只读存储器(ROM)。其中RAM又可以分为两种类型:单寻址RAM(SARAM)和双寻址RAM(DARAM)。
中断程序没有参数传递,即使说明,也将被忽略
4、小题pragma指令告诉编译器如何处理函数。常用的pragma指令有
DSP复习资料

DSP复习资料1、DSP 芯⽚的结构?答:DSP 是改进的哈佛结构 (80C51是哈佛结构)。
冯.诺依曼结构与哈佛结构的区别是地址空间和数据空间分开与否。
冯诺依曼结构数据空间和地址空间不分开,哈佛结构数据空间和地址空间是分开的。
哈佛结构的特点:使⽤两个独⽴的存储器模块,分别存储指令和数据,每个存储模块都不允许指令和数据并存;使⽤独⽴的两条总线,分别作为CPU 与每个存储器之间的专⽤通信路径,⽽这两条总线之间毫⽆关联。
改进的哈佛结构,其结构特点为:使⽤两个独⽴的存储器模块,分别存储指令和数据,每个存储模块都不允许指令和数据并存,以便实现并⾏处理;具有⼀条独⽴的地址总线和⼀条独⽴的数据总线,利⽤公⽤地址总线访问两个存储模块(程序存储模块和数据存储模块),公⽤数据总线则被⽤来完成程序存储模块或数据存储模块与CPU 之间的数据传输,改进的哈佛结构在哈佛结构的基础上⼜加以改进,即使得程序代码和数据存储空间之间也可以进⾏数据的传送。
TMS320LF2407A 采⽤改进的哈佛结构,芯⽚内部具有六条16位总线,即程序地址总线(PAB )、数据读地址总线(DRAB )、数据写地址总线(DWAB )、程序读总线(PRDB )、数据读总线(DRDB )、数据写总线(DWEB ),其程序存储器总线和数据存储器总线相互独⽴,⽀持并⾏的程序和操作数寻址,因此CPU 的读/写可在同⼀周期内进⾏,这种⾼速运算能⼒使⾃适应控制、卡尔曼滤波、神经⽹络、遗传算法等复杂控制算法得以实现。
结构⽰意图如下:2、什么是流⽔线技术?DSP 是不是具有流⽔线技术(pipeline) ?答:流⽔线技术是将各指令的各个步骤重叠起来执⾏,⽽不是⼀条指令执⾏完成之后,才开始执⾏下⼀条指令。
计算机在执⾏⼀条指令时,总要经过取指、译码、取数、执⾏运算等步骤,需要若⼲个指令周期才能完成。
流⽔线技术是将各指令的各个步骤重叠起来执⾏,⽽不是⼀条指令执⾏完成之后,才开始执⾏下⼀条指令。
DSP复习资料.pdf
3、DSP有哪几种分类方式,可将DSP芯片分成哪几类?答:DSP有三种分类方式:按基础特性分类、按数据格式分类和按用途分类。
按基础特性可分为静态DSP芯片和一致性DSP芯片;按数据格式可分为定点DSP芯片和浮点DSP芯片;按照用途可分为通用型DSP芯片和专用型DSP芯片。
7、冯·诺伊曼结构和哈佛结构的主要区别是什么?与前者相比,哈佛结构有何优势?答:1)主要区别:冯·诺伊曼结构采用单存储空间,即程序指令和数据共用一个存储空间,使用单一的地址和数据总线。
哈佛结构采用双存储空间,程序存储器和数据存储器分开,有各自独立的程序总线和数据总线。
2)哈佛结构优势哈佛结构可独立编址和访问,可对程序和数据进行独立传输,使取指令操作、指令执行操作、数据吞吐并行完成,极大地提高了数据处理能力和指令的执行速度,非常适合于实时的数字信号处理。
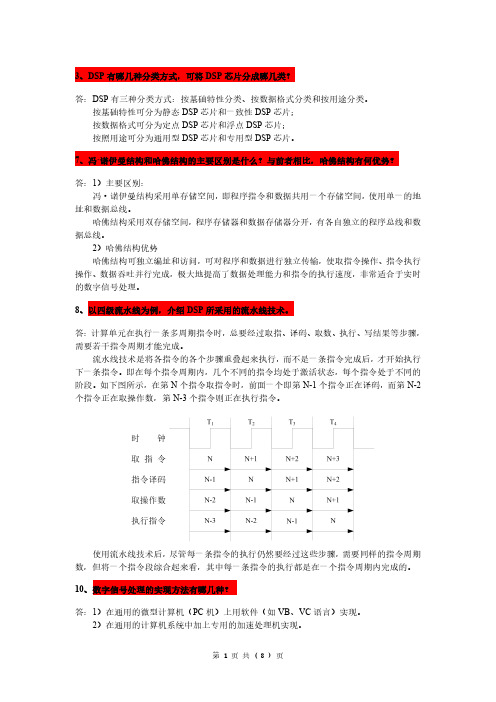
8、以四级流水线为例,介绍DSP所采用的流水线技术。
答:计算单元在执行一条多周期指令时,总要经过取指、译码、取数、执行、写结果等步骤,需要若干指令周期才能完成。
流水线技术是将各指令的各个步骤重叠起来执行,而不是一条指令完成后,才开始执行下一条指令。
即在每个指令周期内,几个不同的指令均处于激活状态,每个指令处于不同的阶段。
如下图所示,在第N个指令取指令时,前面一个即第N-1个指令正在译码,而第N-2个指令正在取操作数,第N-3个指令则正在执行指令。
使用流水线技术后,尽管每一条指令的执行仍然要经过这些步骤,需要同样的指令周期数,但将一个指令段综合起来看,其中每一条指令的执行都是在一个指令周期内完成的。
10、数字信号处理的实现方法有哪几种?答:1)在通用的微型计算机(PC机)上用软件(如VB、VC语言)实现。
2)在通用的计算机系统中加上专用的加速处理机实现。
3)用单片机(如MCS-51、96系列等)实现。
4)用FPGA等产品实现数字信号处理算法。
5)用通用的可编程DSP芯片实现。
DSP复习资料
DSP复习资料DSP复习资料填空题:1、TL公司的DSP产品主要有TMS320C2000、TMS320C5000和TMS320C6000系列。
2、程序计数器的值可以通过复位操作、顺序执行指令、分支转移、累加器转移、块重复、子程序调用、从累加器调用子程序,中断操作来改变。
3、COFF目标文件都包含以下三种形式的段,分别是.text文本段、.data数据段、.bass保留空间。
4、DSP的寻址方式有七种分别是立即寻址、绝对寻址、累加器寻址、直接寻址、间接寻址、存储器映像寄存器寻址、堆栈寻址。
5、DSP芯片的开发工具可以分为代码生成工具和代码调试工具两类。
6、子段有两种,用.sect命令建立的是已初始化段,用.usect命令建立的是未初始化段。
7、DROM为1,片内ROM配置程序和存储空间,ST1的CPL为1表示选用堆栈指针SP的直接寻址方式;ST1的C16等于1表示ALU 工作在双精度算式(填0或1)8、DSP具有两个40 位的累加器A和B,累加器A的32-39位是保护位。
9、TMS320C54x DSP的内部总存储空间为192K字,分成了3个可选择的存储空间分别是64K程序存储空间、64K数据存储空间、64K的I/O存储空间。
10、TMS320C54x有4组地址总线分别是PAB、CAB、DAB和EAB总线。
11、链接器对段的处理主要头通过MEMORY 和SECTIONS的两个命令来完成。
12、DSP有3个16位寄存器作为状态控制寄存器,分别是ST0、ST1和PMST。
13、TMS320C54x的三类串行口分别是标准同步串行口、缓冲串行口、时分多路串行口。
14、DSP的内部存储器类型可分为RAM和ROM,其中RAM可以定义为两个类型单寻址RAM(SARAM)和双寻址RAM(DARAM)。
15、在数字信号处理器寻址指令系统中,D mad为16位立即数,表示数据存储器地址,P mad表示程序存储器地址。
DSP期末复习资料_图文(精)

DSP期末复习资料2.DSP芯片的特点:哈佛结构:将程序空间和数据空间分开,可同时取指令和取操作数;(重要)多总线结构:一个机器周期可以多次访问程序空间和数据空间,其内部有P、C、D、E 4个总线;(重要)流水线结构:DSP执行一条指令需要取指、译码、取操作数和执行等几个阶段;(重要)多处理单元:算术逻辑运算单元、辅助寄存器、累加器、硬件乘法器等;特殊的DSP指令、指令周期短、运算精度高、硬件配置强。
3.TMS320系列DSP可分为:C2000(16位/32位定点DSP,主要运用控制领域)、C5000(16位定点DSP,用于高性能、低功耗的中高档应用场合)、C6000(32位DSP,高性能)系列。
4. TMS320C54X的主要特性:⑴多总线结构(1条程序总线、3条数据总线、4条对应地址总线);⑵192K字节可寻址空间(64K字程序存储器、64K字数据存储器以及64K字I/O空间);⑶片内有单寻址RAM(SRAM)和RAM(DRAM存储器。
5.TMS320VC5416-160有1个CPU、6. C54X的总线结构:C54X片内有8条16位主总线、4条程序/数据总线和4条相应的地址总线。
7.当处理器复位时,复位和中断向量都映像到程序空间的FF80h。
8.累加器A和B的差别在于:累加器A的31~16位可用于乘法器的一个输入。
9.桶形移位器的移位数可用一个立即数、状态寄存器ST1的累加器移位方式ASM或者T寄存器中最低的6位数值来定义。
10.指数编码器可以在单个周期内执行EXP指令,求的累加器中数据的指数值,并以2的补码形式存放在T寄存器中,可以用11.C54XCPU有3个状态寄存器:状态寄存器0(ST0)、状态寄存器1(ST1)、处理工作方式状态寄存器(PMST)。
12.C54X中断可分为可屏蔽中断和非屏蔽中断。
所有的软件中断都是非屏蔽的。
13.定时中断的周期:CLKOUT*(TDDR+1)*(PRD+1)14. C54X片内有一个主机接口(HPI)。
DSP复习资料

答:流水线作业就是使取址、译码、取操作数和执行指令等操作重叠执行。 3. 什么是哈佛总线?P1
答:哈佛总线就是程序空间和数据空间分开,分别由各自的地址总线和数据总线; 它可以同时完成获取指令和数据读取操作。 4. 2812 的 SPI 和 SCI 接口的主要异同?
EALLOW; PieVectTable.TINT0=&cpu_timer0_isr; GpioMuxRegs.GPAMUX.all=0x0000; GpioMuxRegs.GPADIR.all|=0x0001; EDIS; InitCpuTimers(); ConfigCpuTIMER(&CpuTimer0,100,2000000); StartCpuTimer0; IER|=M_INT1; PieCtrlRegs.PIEIER1.bit.INTx7=1; EINT; ERTM; for(;;) { GpioDataRegs,GPATOGGLE.bit.GPIOA0=1; CpuTimer0.InterruptCount==CpuTimer0.InterruptCount ; } } interrupt void cpu_timer0_isr(void) { CpuTimer0.InterruptCount++; PieCtrlRegs.PIEACK.all= PIEACK_GROUP1; } 15. 拨码键盘地址 0x88000,LED 显示器地址 0x88001,编程实现:拨码为 1,相应灯亮;反 之则灭。 答:#include “DSP2812x_Device.h” #include “DSP2812x_Examples.h” void InitsysCtrl(void); void main(void) { InitsysCtrl(); DINT; IER=0x0000; IFR=0x0000; unsigned int temp; while(1) { temp=*(int*)0x88000; *(int*)0x88001=temp; } } void InitsysCtrl(void) { EALLOW;
dsp复习资料
一,Dsp 的硬件结构:⑴1组程序总线(PB),3组数据总线(CB,DB,EB),4组地址总线(PAB,CAB,DAB,EAB).⑵40位算术逻辑单元alu{C16=0工作在双精度算术运算方式,C16=1工作在双16位方式}ALU 溢出后状态寄存器ST0的OVM=1时,用32位最大正数007FFFFFFFH 或最大负数FF80000000H 加载累加器,溢出后溢出标志位OVA 或OVB=1直到复位!⑶1个40位桶行移位寄存器,⑷2个独立40位ACCA 和ACCB{ACCA 和ACCB 差别在于A 的31~16位可以用途乘法器的一个输入}.⑸17X17并行乘法器与40位的专用加法器相连,用于MAC 运算.⑹比较/选择/存储单元(CSSU)用于加法比较运算,⑺指数单元EXP(40位),⑻有16bit 状态寄存器ST0,ST1和工作方式状态寄存器PMST.二,存储结构:①哈佛结构(ROM 和RAM 分开),②三个独立64kb,ROM,RAM,I/O 空间,程序空间通过PMST 的MP/MC\和OVLY 控制,MP 控制使用内部存储器,MP=0,4000H-EFFFH 程序存储空间定义为外部存储器,FF00H-FEFFH 为内部,FF00H-FFFFH 为内部ROM 存储器,工作方式为微型计算机,MP=1,4000H-FFFFH 全部定义为外部存储器,工作方式为处理器模式.当OVLY=0时,0000H~3FFFH 全部定义为外部程序存储空间,程序空间不使用内部RAM,此时内部RAM 只作为数据存储器使用,OVLY=10000H~007FH 保留,程序无法使用,0080H~3FFFH 定义为内部DARAM,即内部RAM 被映射到程序存储空间和数据存储空间.③片上外设:2个通用I/O,XF(外部标志输出信号.控制外设工作)和BIO(控制分支转移信号,监测外部状态).BIO=0时执行转移指令.④定时器:4位预分频器和16位减法计数器组成,定时设定寄存器TIM(16bit)→0024H,复位/定时TIM 装入PRD(定时寄存器→0025H,存放定时常数)寄存器的值,然后减1计数,TIM 减到0后产生TINT 中断,TCR(定时控制寄存器→0026H)用来控制定时器的控制位和状态位,包括定时分频TDDR,预标定时计数器PSC,控制位TRB 和TSS 等.周期=时钟T*(TDDR+1)*(PRD+1).⑤时钟发生器:内部振荡器和锁相环PLL{⑴硬件配置PLL,通过[CLKMD1,CLKMD2,CLKMD3R 的状态,]⑵软件设置[通过16位的CLKMD →58H 控制]},⑥主机接口HPI:{控制寄存器HPIC,地址寄存器HPIA,数据锁存器HPID,HPI 内存},三,外设接口:软件等待状态寄存器SWWSR →0028H,复位时SWWSR →7FFFH,四,中断:1,可屏蔽中断{INT0-3,串行口中断,定时器中断TINT0-1,DMA 中断(DMAC4,DMAC5).HPINT(HPI 中断)}.2,非可屏蔽中断{外部中断投复位和‾NMI ‾(可用软件中断)}中断标志寄存器IFR 和中断屏蔽寄存器IMR{中断向量地址的计算[中断向量地址是由PMST 寄存器中的IPTR(中断向量指针,9bits)和左移2位后的中断向量序号(中断向量序号为0~31,左移两位后变成7位)所组成]例如INT0的中断序号为16(10H)左移两位后成40H 若IPTR=0001H,则中断地址为00C0H,复位时IPTR 全为1,所以硬件复位后程序总是从0FF80H 执行}.五,指令系统:1,寻址方式{i.立即寻址.[用于初始化(LD#80H,A)].ii.绝对寻址[①数据存储器(dmad)寻址(mvkd exam1,*ar5)②程序存储器(pmad)寻址(mvpd table,*ar2)③端口(pa)寻址(PORTR FIFO,*AR5)④*(1K)寻址(LD *(PN),A))].iii.累加器寻址{是用累加器中的数值作为地址来读写程序存储器,READA Smem,WRITASmen}.iv.直接寻址{ADD @x,A}.v.间接寻址[(寻址范围0~64kb)利用辅助寄存器内容作为地址访问存储器(C54x 有8个16bits 辅助寄存器AR0-AR7)]vi.存储器映像寄存器(MMR))寻址{LDM,MVDM,MVMD,MVMM,POPM,PSHM,STLM,STM}vii.堆栈寻址{PSHD,PSHM,POPD,POPD}.常用缩写{Smem:16位的单寻址操作数,Xmem:16位双寻址操作数,Ymem:16位双寻址操作数,PA:16位立即数,src:源累加器,dst:目的累加器,lk:16位长立即数},六,软件开发过程:.text 文本段,.data 数据段,.bss 保留空间,通常对未初始化变量保存,.sect 建立包含代码和数据的自定义段,.usect 为未初始化变量保留存储空间的自定义段,.word 用来设置一个或多个16位带符号整型常数,.int 设置无符号整型常数.title 后面是双引号的程序名,.end 结束汇编命令,汇编程序举例:㈠堆栈的使用:100单元的堆栈,size .set 100 \stack .usect “stk ”,size\STM #stack+size SP.㈡加减乘,①Z=X+Y-W,SUM:LD @x,A\ADD @y,A\SUB @w,A\STL A,@z.②y=mx+b,ld @m,t\mpy @x,A\add @b,A\stlA,@y.③y=x1*a1+x2*a2,ld @x1,t\mpy @a1,B\ld @a2,t\mpy @x2,b\stlB,@y\sth B,@y+1④y= a i 4i =1x i stm #a,ar1\stm #x,ar2\stm #2,ar3/ld *ar1+,t\mpy *ar2+,A\loopl:ld *ar1+,tMpy *ar2+,b/max A/banz loop,*ar3-㈢数组初始化x[5]=[1,2,3,4,5].data\tbl:.word 1,2,3,4,5\.sect “.vector ”\B START\.bss x,5\.text\START:stm #x,ar5\rpt #4\MVPD TBL,*AR5.㈣设计对称FIR 滤波器(N=8).title “firs5”\.mmregs\.def start\.bss y,1\x_old .usect “data1”,4\x_new .uscet “data2”,A\size .set 4\PA0 .set 0\PA1 .set 1\.data/COEF .word 1*32768/10,2*32768/10\.text/start:ld #y,dp\ssbxfrct\stm #x_new,ar2\stm #x_old+(size-1),ar3\stm #size,bk\stm #-1,ar0\POPTR PA1,#x_new\FIR5: ADD *AR2+0%,*AR3+0%,A\RPTZ B,#(size-1)\FIRS *AR2+0%,*AR3+0%,COEF\STH B,@y\MAR *+AR2(2)%\MAR *AR3+%\MVDD *AR2,*AR3+0%\BD FIR5\POPRTR PA1,*AR2\.end 用线性缓冲法和直接寻址法实现FIR 滤波器:N=5,Y(n)=a0x(n)+a1x(n-1)+a2x(n-2)+a3x(n-3)+a4x(n-4)程序:.title “fir1.asm ”\.mmrges\.def start\.bss y,1\XN .usect “XN ”,1\XNM1 .usect “XNM1”,1\XNM2 .usect “xnm2”,1\xnm3 .Usect “xnm3”,1\xnm4 .usect “xnm4”,1\a0 .usect “a0”,1\a1 .usect “a1”,1\a2 .usect “a2”,1\a3 .usect “a3”,1\a4 .usect “a4”,1\pa0 .set 0\pa1 .set 1\.data\table: .word1*32768/10\.word -3*32768/10\.word 5*32768/10\.word -3*32768/10\.word 1*32768/10\.text\start: ssbxfrct\stm #a0,ar1\rpt #4\mvpd table,ar1+\ld #xn,dp\portr pa1,@xn\fir1:ld @xnm4,t\Mpy @a4,a\ltd @xnm3\mac @a3,a\ltd @xnm2\mac @a2,a\ltd @xnm1,a\mac @a1,a\ltd @xn,a\mac @a0,a\ltha,@y\portw @y,pa0\bd fir1\portrpa1,@xn\.end 循环缓冲区和双操作数寻址方法实现:.title “firs ”\.mmregs\.def start\.bss new_data.1\.bss y,1\xn .usect “xn ”,5\a0 .usect “a0”,5\.data\tsble:.word 1*32768/10\.word 2*32768/10\.word 3*32768/10\.word 4*32768/10\.word 5*32768/10\.text\start:ssbxfrct\stm @a0,ar1\rpt #4\mvpd table,*ar1+\stm #xn+4,ar3\stm #a0+4,ar4\stm 5,bk\stm #-1,ar0\ld ##new_data\fir4:rptz a,#4\mac *ar3+0%,*ar4+0%,a\stha,@y\bd fir4\ldnew_data,bstl b,*ar3+0%\.end。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
10、链接命令文件主要内容是什么? 答:链接器命令文件主要包含如下内容: (1)输入文件名,就是要链接的目标文件和文档库文件,或者是其它的命令文件。如果要 调用另一个命令文件作为输入文件, 此句一定要放在本命令文件的最后, 因为链接器不能从 新调用的命令文件返回。 (2)链接器选项。这些选项既可以用在链接器命令行,也可以编在命令文件中。它们在命 令文件中的使用方法与在命令行中相同。 (3)MEMORY 和 SECTIONS 都是链接器命令,用来指定目标存储器结构和地址分配。如 果链接命令文件中没有 MEMORY 和 SECTIONS 命令 (默认情况) , 则链接器就从地址 0080h 一个段接着一个段进行配置。 12、简述混合编程的三种主要方法。 答:(l)独立编写 C 程序和汇编程序,分开编译或汇编形成各自的目标代码模块,然后用 链接器将 C 模块和汇编模块链接起来 (2)在 C 语言程序中使用汇编程序的变量和常数及函数 (3)直接在 C 语言程序的相应位置嵌入汇编语句。 1、简述汇编语句有哪两种格式。 答:汇编语句有两种格式,一种是常见的助记符格式,另一种是代数指令格式。 1)助记符格式 [标号] [ :] 操作码助记符 [操作数列表] [;注释] 2)代数指令格式 [标号] [ :] 代数指令 [;注释] 4、如何确定操作数是地址还是立即数或间接地址? 答:汇编器允许在操作数前使用前缀来指定操作数(常数、符号或表达式)是地址还是立即 数或间接地址。 1)前缀#。操作数作为立即数。即使操作数是寄存器或地址,也当作立即数处理。此 时,汇编器将地址处理为一个值,而不当做地址处理。 2)前缀*。操作数作为间接地址。汇编器将此操作数作为间接地址对待,它将操作数中 的内容作为地址; 3)前缀@。表示其后的操作数是采用直接寻址或绝对地址寻址的地址。在代数指令中 不能省略,但是在助记符指令中可以省略。 2、TMS320C5000 提供了哪几种数据寻址模式? 答:C5000 共有 7 种有效的数据寻址方式。 1)立即寻址:指令中嵌有固定的数,主要用于初始化。 2)绝对寻址:利用 16 位地址寻址存储单元。 3)累加器寻址:把累加器的内容作为地址。 4)直接寻址:利用数据存储器页指针和堆栈指针寻址。 5)间接寻址:利用辅助寄存器作为地址指针。
第 2 页 共 ( 8 ) 页
5)控制宏扩展列表。 使用一个宏分 3 个过程:定义宏、调用宏和扩展宏。 5、什么是段,段的作用是什么? 答:所谓段,是指连续的占有存储空间的一个数据或代码块。 汇编语言源程序按段组织, 每行汇编语句都从属于一个段, 并由段汇编伪指令表明该段的属 性。一个目标文件中的每一个段都是分开的和各不相同的。段(Sections)是 COFF 格式目 标文件中最重要的概念,也是目标文件中的最小单位。每个目标文件都分成若干个段。 6、汇编程序中,系统默认段有哪些?各段的具体作用是什么? 答:所有的 COFF 格式目标文件都至少包含以下 3 种形式的默认段: .text 段 通常包含可执行代码; .data 段 通常包含初始化数据; .bss 段 通常为未初始化变量保留存储空间。 7、自定义段、子段的含义是什么,如何编写和定义? 答:自定义段也叫做命名段,是由.sect 和.usect 命令建立,需要自己定义段名的段。它们除 了被分开汇编外,其它方面和默认的.text、.data 和.bss 段在使用上相同。另外,不能用不同 的伪指令处理名字相同的段。 子段是大段中的小段。子段可以通过.sect 和.usect 伪指令产生。子段命名的句法为: 基段名: 子段名 当汇编器在基段名后面发现冒号, 则紧跟其后的段名就是子段名。 子段的定位方法和段 相同,既可以单独为其分配存储单元,也可以在相同的基段名下与其他段组合在一起。子段 也有 2 种类型:用.sect 命令建立的初始化段和用.usect 命令建立的段是未初始化段。 8、汇编器对段是如何处理的? 答: 汇编器的任务是在汇编过程中, 根据汇编命令用适当的段将各部分程序代码和数据连在 一起,构成目标文件。汇编器对段的处理功能主要是根据段名,确定汇编语言程序中的各部 分属于哪个特定的段,最终形成几个独立的段。其功能包含两层含义: (1)相同段名放在连续空间; (2)不同段名各自独立。 9、链接器对段是如何处理的? 答:链接器在处理段的时候,有如下两个主要任务: 1)把一个或多个 COFF 目标文件(.obj 文件)中的各种段作为链接器的输入段,经链接后 在一个可执行的 COFF 输出模块中建立各个输出段。 2) 在程序装入时对其重新定位,为各个输出段选定存储器地址。 为完成如上任务,链接器提供了两条命令支持,即: 1)MEMORY 命令。此条命令用来定义目标系统的存储器配置空间,包括对存储器各部 分命名,以及规定它们的起始地址和长度; 2)SECTIONS 命令。此命令告诉链接器如何将输入段组合成输出段,以及将输出段在 存储器中的什么位置。
第 4 页 共 ( 8 ) 页
6)存储器映像寄存器寻址:修改映射像存器中的值,不影响当前数据存储器页指针和 堆栈指针的值。 7)堆栈寻址:用来管理系统堆栈中的操作,即把数据压入和弹出系统堆栈。由标号域、 操作码助记符域、操作数域和注释域组成。 3、什么是立即寻址,什么是绝对寻址,二者的区别是什么? 答:所谓立即寻址,就是指令中包含了立即操作数,操作数紧随操作码存放在程序存储器中 的寻址方式。 如果指令中包含的是寻找操作数的 16 位单元地址,那么称这种寻址方式为绝对寻址。 二者区别是: 立即寻址的操作数随操作码存放在程序存储器中, 故在执行时没有寻找数 据地址的过程,因此运行速度快,而绝对寻址需要根据操作数地址来寻址操作数,故运行速 度慢;立即寻址的操作数需要占用程序存储空间,而绝对寻址则不需要;立即寻址的操作数 不能改变,常用于表示常数和初始化寄存器,而绝对寻址的操作数可以任意改变,常用于非 实时的场合。 5、什么是直接寻址,直接寻址如何形成 16 位数据单元地址? 答:直接寻址就是利用数据页指针 DP 或堆栈指针 SP 寻址。 CPL=0 时,处理器将 DP 的 9 位基地址与指令中的 7 位偏移地址连接起来,形成 16 位 的数据存储空间存储单元的地址。 CPL=1 时,选择 SP 的 16 位基地址加上指令中的 7 位偏移地址,形成 16 位的数据存 储空间存储单元的地址。 6、什么是间接寻址,间接寻址有哪些句法? 答:间接寻址就是利用辅助寄存器(AR0~AR7)作为地址指针进行寻址。间接寻址可 分为单操作数间接寻址和双操作数间接寻址 11、C54x 的中断分为哪几类? 答:总体来说,C54x 中断可以分成可屏蔽中断和非屏蔽中断两大类。 第一类:可屏蔽中断。这些都是可以用软件来屏蔽或开放的中断。 第二类:非屏蔽中断。这些中断是不能够屏蔽的。C54x 对这一类中断总是响应的,并 及时从主程序转移到中断服务程序。C54x 的非屏蔽中断包括所有的软件中断以及两个外部 硬件中断 RS (复位)和 NMI (也可以用软件进行 RS 和 NMI 中断)。 12、C54x 的可屏蔽中断如何实现中断屏蔽与解屏蔽? 答:1)中断屏蔽: ST1 寄存器中的 INTM=l,所有可屏蔽中断被禁止。 2)中断开放:(以下两个条件需要同时满足) (1)ST1 寄存器中的 INTM =0,所有可屏蔽中断开放; (2)当中断屏蔽寄存器(IMR)的任何一位为 l 就会开放相应的中断。 13、C54x 的中断向量地址如何形成?
第 1 页 共 ( 8 ) 页
3)用单片机(如 MCS-51、96 系列等)实现。 4)用 FPGA 等产品实现数字信号处理算法。 5)用通用的可编程 DSP 芯片实现。 5、CCS 开发环境提供了哪些图形显示功能,如何使用? 答:CCS 可以提供 4 类图形显示,即时域/频域图、星座图、眼图和图像显示。 在 CCS 菜单栏中选择 View→Graph 命令,弹出一个图形类型选择级联菜单,选择图像 显示类型并输入相关信息即可使用。 1、简述 DSP 程序调试的三种常用方法。 答:1)利用软件仿真器进行调试。 这种方式不需要目标硬件,只需在 PC 机上就可以运行。它可以仿真 C54x DSP 芯片包 括中断以及输入/输出在内的各种功能,从而可以在非实时条件下完成对用户程序的调试。 2)利用硬件仿真器进行调试。 这种方式需要用户提供带 C54x DSP 芯片的系统级目标板。C54x 的硬件扫描仿真器采 用 JTAG IEEE 1149.1 标准,仿真插头共有 14 个引脚,扫描仿真器通过仿真头将 PC 机中的 用户程序代码下载到目标系统的存储器中, 并在目标系统内实时运行, 这给程序调试带来了 很大的方便。 3)利用评价模块进行调试 C54x 评价模块(EVM 板)是一种带有 DSP 芯片的 PC 机 ISA 插卡。卡上还配置有一 定数量的硬件资源,用户建立的程序,可以在 EVM 板上运行。通过运行,可以评价 DSP 芯片的性能,以确定 DSP 芯片是否满足应用要求。 2、简述汇编伪指令的种类和作用。 答:汇编伪指令是汇编语言程序的一个重要组成部分,一个汇编语言程序中,可能包含多种 汇编伪指令,其作用是为程序提供数据,并且控制汇编的过程。根据其功能可分为如下 8 种伪指令: 1)段定义伪指令; 2)常数初始化伪指令; 3)段程序计数器(SPC)定位伪指令; 4)输出列表格式伪指令; 5)引用其他文件的伪指令; 6)条件汇编伪指令; 7)汇编时符号定义伪指令; 8)其他汇编伪指令。 3、简述汇编宏指令的功能以及使用宏的过程。 答:编译器支持宏语言,允许用户利用宏来创建自己的指令。宏语言的主要功能包括: 1)定义自己的宏和重新定义已存在的宏; 2)简化较长的或较复杂的汇编代码; 3)访问归档器创建的宏库; 4)处理一个宏中的字符串;
使用流水线技术后, 尽管每一条指令的执行仍然要经过这些步骤, 需要同样的指令周期 数,但将一个指令段综合起来看,其中每一条指令的执行都是在一个指令周期内完成的。 10、数字信号处理的实现方法有哪几种? 答:1)在通用的微型计算机(PC 机)上用软件(如 VB、VC 语言)实现。 2)在通用的计算机系统中加上专用的加速处理机实现。
3、DSP 有哪几种分类方式,可将 DSP 芯片分成哪几类? 答:DSP 有三种分类方式:按基础特性分类、按数据格式分类和按用途分类。 按基础特性可分为静态 DSP 芯片和一致性 DSP 芯片; 按数据格式可分为定点 DSP 芯片和浮点 DSP 芯片; 按照用途可分为通用型 DSP 芯片和专用型 DSP 芯片。 7、冯·诺伊曼结构和哈佛结构的主要区别是什么?与前者相比,哈佛结构有何优势? 答:1)主要区别: 冯·诺伊曼结构采用单存储空间, 即程序指令和数据共用一个存储空间, 使用单一的地 址和数据总线。 哈佛结构采用双存储空间, 程序存储器和数据存储器分开, 有各自独立的程序总线和数 据总线。 2)哈佛结构优势 哈佛结构可独立编址和访问,可对程序和数据进行独立传输,使取指令操作、指令执行 操作、数据吞吐并行完成,极大地提高了数据处理能力和指令的执行速度,非常适合于实时 的数字信号处理。 8、以四级流水线为例,介绍 DSP 所采用的流水线技术。 答:计算单元在执行一条多周期指令时,总要经过取指、译码、取数、执行、写结果等步骤, 需要若干指令周期才能完成。 流水线技术是将各指令的各个步骤重叠起来执行, 而不是一条指令完成后, 才开始执行 下一条指令。即在每个指令周期内,几个不同的指令均处于激活状态,每个指令处于不同的 阶段。如下图所示,在第 N 个指令取指令时,前面一个即第 N-1 个指令正在译码,而第 N-2 个指令正在取操作数,第 N-3 个指令则正在执行指令。