35 高阶系统分析
自动控制原理课程设计高阶系统的时域分析
目录1系统稳定性分析 (1)2高阶系统的时域响应 (2)2.1系统单位阶跃响应曲线 (2)2.2系统单位斜坡响应曲线 (4)2.3系统单位加速度响应曲线 (5)2.4动态性能指标计算 (6)2.4.1动态性能指标计算 (6)2.4.2动态性能指标计算 (6)2.5 稳态性能指标计算 (9)3根轨迹图绘制 (10)3.1根轨迹数据计算 (10)3.2用MATLAB绘制根轨迹图 (11)4心得体会 (12)参考文献 (13)本科生课程设计成绩评定表高阶系统的时域分析1 系统稳定性分析给定参数系统稳定性分析: 对于开环传递函数))(95()()(2a s s s s b s K s G p ++++=在给定条件K=15,a=2,b=4时用劳斯判据判断系统的稳定性,经过化简可得系统的特征方程为:D(s)=S 4+7S 3+19S 2+33S+60=0其劳斯表为S 41 19 60 S 3 7 33 0 S2 14.3 60 S 1 3.6 0 S 0 60从表中可以看出,第一列系数符号全部为正,故系统是稳定的。
2高阶系统的时域响应K=15,a=2,b=4时,系统的开环传递函数为:G p=15(s+4)s(s2+5s+9)(s+2)=15s+60s4+7s3+19s2+18s系统为Ⅰ型系统,可以跟踪单位阶跃信号、单位斜坡信号,不能跟踪单位加速度信号。
系统响应为C(s)=15s+60s4+7s3+19s2+33s+60R(s)2.1系统单位阶跃响应曲线当输入为单位阶跃函数信号时,R(s)=1S,系统响应为C(s)=15s+60s4+7s3+19s2+33s+60·1S运用MATLAB程序作图如图2-1,程序为:num=[15 60];den=[1 7 19 33 60];G=tf(num,den);step(G);grid on;xlabel('t');ylabel('c(t)');title('单位阶跃响应')图2-1 系统阶跃响应由图中数据可得:上升时间为t=1.02sr峰值时间=1.73stp调节时间=33.1sts超调量σ%=78%稳态误差为=0ess当输入为单位斜坡函数信号时,R(s)=1s2,系统响应为C(s)=15s+60s4+7s3+19s2+33s+60·1s2运用MATLAB程序作图如图2-2,程序为:num=[15 60];den=[1 7 19 33 60];G=tf(num,den);t=0:0.01:10;u=t;lsim(G,u,t);grid on; xlabel('t');ylabel('c(t)');title('单位斜坡响应')图2-2 单位斜坡响应当输入为单位加速度函数信号时,R(s)=1s3,系统响应为C(s)=15s+60s4+7s3+19s2+33s+60·1s3运用MATLAB程序作图如图2-3,程序为:num=[15 60];den=[1 7 19 33 60];G=tf(num,den);t=0:0.01:10;u=(0.5*t.^2);lsim(G,u,t)grid on;xlabel('t');ylabel('c(t)');title('单位加速度响应')图2-3 单位加速度响应2.4动态性能指标计算2.4.1主导极点法控制系统的暂态性能指标通常是零初始条件下,通过系统的阶跃响应的特征定义的,系统的暂态性能指标实际上就是刻画阶跃响应曲线特征的一些量。
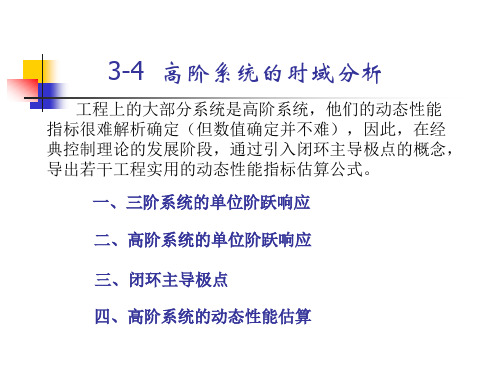
3-5 高阶系统的时域分析
※偶极子: 偶极子: 偶极子 定义:一对非常靠近的零、 定义:一对非常靠近的零、极点会使该极点的 对应留数很小, 对应留数很小,其在系统动态响应中的作用近似相 互抵消,这对零极点叫做偶极子。 互抵消,这对零极点叫做偶极子。
jω
偶极子
− 5σ
−σ
σ
作用:通过增加含有零点的微分环节使某些极 通过增加含有零点的微分环节使某些极 点的作用减小或消失; 点的作用减小或消失;或者增加含有极点的惯性环 节使某些零点的作用减小或消失。 节使某些零点的作用减小或消失。
03:03
Aj = [C ( s )( s − p j )]s = p j
进一步理解
Aj = [C ( s )( s − p j )]s = p j
a.零极点相互靠近,则对A 的影响就越小, a.零极点相互靠近,则对Ai的影响就越小,如果 零极点相互靠近 离虚轴较远(衰减速度快) 影响越小; 离虚轴较远(衰减速度快),对c(t)影响越小; 影响越小 b.零极点很靠近, 几乎没影响; b.零极点很靠近,对c(t)几乎没影响; 零极点很靠近 几乎没影响 c.零极点重合——偶极子,对c(t)无任何影响; 无任何影响; c.零极点重合——偶极子, 零极点重合——偶极子 无任何影响 d.极点 附近无零点,且靠近虚轴, d.极点pj附近无零点,且靠近虚轴,则此极点对 极点 c(t)影响大。 影响大。 影响大
03:03
描述系统的微分方程高于二阶的系统为高阶系 统。 工程上通常把高阶系统采用闭环极点的概念适当 地近似成低阶系统(常为二阶)进行分析。 原因: 1、高阶系统的微分方程求解比较困难; 2、在工程设计的许多问题中,过分讲究精确往 往是不必要的,甚至是无意义的。
03:03
高阶系统性能分析
题 目: 高阶系统性能分析 初始条件:设单位系统的开环传递函数为122(1)()(24)(1)p K s G s s s s s ττ+=+++ 要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)1、 当120ττ==时,绘制根轨迹并用Matlab 求取单位阶跃响应、单位斜坡响应,并求取动态和稳态性能指标2、 当12120.2,05,0ττττ====和时,分别绘制闭环系统根轨迹并用Matlab 求取单位阶跃响应、单位斜坡响应,并求取动态和稳态性能指标 3、 当12120,0.20,5ττττ====和时,分别绘制闭环系统根轨迹并用Matlab 求取单位阶跃响应、单位斜坡响应,并求取动态和稳态性能指标 4、 比较上述三种情况的仿真结果,分析原因,说明增加零极点对系统性能的影响。
时间安排:指导教师签名: 年 月 日系主任(或责任教师)签名: 年 月 日高阶系统性能分析1.课设分析1.1课设目的1.了解高阶系统的稳态性能,动态性能与系统开环传递函数零极点的关系。
2.学习并熟悉根据系统开环传递函数作系统根轨迹曲线。
3.学会运用matlab求系统的阶跃响应,斜坡响应,观察系统动态性能。
运用matlab绘根轨迹曲线。
1.2分析过程1.在控制过程中,几乎所有的系统都是高阶系统,即用高阶微分方程描述的系统,其动态性能指标的确定是比较复杂的,工程上常采用闭环主导极点的概念对高阶系统进行近似分析,或直接应用MATLAB软件进行高阶系统分析。
2.在此次高阶系统分析之中,将待求的三个状态进行比较,可以将第一参数状态为原型系统的传递函数,第二类为添加不同零点的开环传递函数,第三类为添加不同极点的开环传递函数。
3.在运用matlab对系统进行创建和时域分析时,进行时域分析的传递函数是闭环传递函数,在绘制根轨迹曲线时参照的传递函数是开环传递函数。
4.系统的稳态性能在本次课设中为稳态位置误差,稳态速度误差,动态性能有五个指标:延迟时间td ,上升时间ts,峰值时间tp,调节时间ts,超调量σ%。
第四节高阶系统分析
5
三阶系统单位阶跃响应
e p3t c(t ) 1 2 ( 2) 1 e nt [ 2 ( 2) 1] 2 2 { ( 2) cos d t sin d t}, t 0 2 ( 2) 1 1
1 10 1 10 1 1 1 C ( s) ( s) s s( s 1)(s 10) s 9 s 1 9 s 10
c(t ) 1 10 t 1 10t e e 9 9
Sunday, March 31, 2019
11
高阶系统的定性分析
零点的影响 零点不影响响应的形式。零点只影响各项的系数。零点若 靠近某个极点,则该极点对应项的系数就小。 偶极子 若有一对零极点之间的距离是极点到虚轴距离的十分之一 以上,这对零极点称为偶极子。偶极子对瞬态响应的影响可以 忽略。 系数 a j , l , l 取决于零、极点分布。有以下几种情况: 若极点远离原点,则系数小; 极点靠近一个零点,远离其他极点和零点,系数小; 极点远离零点,又接近原点或其他极点,系数大。
c(t ) a0 et (1 cosd t 1 sin d t )
Sunday, March 31, 2019
13
主导极点及应用
[利用主导极点的概念可以对高阶系统的特性做近似的估计分析]
具有主导极点的高阶系统可近似为二阶或一阶系统。此时 高阶系统的特性可用等效低阶系统的特性做近似的估计分析。 高阶系统近似简化原则: 在近似前后,确保输出稳态值不变; 在近似前后,瞬态过程基本相差不大。 具体规则是:在时间常数形式的开环或闭环传递函数上略去小 时间常数。
衰减慢且系数大的项在瞬态过程中起主导作用。
Sunday, March 31, 2019
自动控制原理第三节2_高阶系统
例如:(s)
(s2
n2(s z) 2 ns n2 )(s
p)
如果: z 5以及 p 5
n
n
z p
则:
(s)
p(s2
z n 2 2 ns n2 )
n
j d jd
说明:假设输入为单位阶跃函数,则化简前后的稳态值如下
lim s 1 s (s2
s0
n2(s z) 2 ns n2 )(s
[例如]: p1,2 1 n1 jn1
1
2 1
jd
为某高阶系统
的主导极点,则单位阶跃响应近似为:
c(t) a0 et (1 cosdt 1 sin dt)
利用主导极点的概念可以对高阶系统的特性做近似的估计分析。 高阶系统近似简化原则: 在近似前后,确保输出稳态值不变;
在近似前后,瞬态过程基本相差不大。
阶系统的单位阶跃响应取决于闭环系统的零、极点分布。
[定性分析]:
对于闭环极点全部位于s左半平面的高阶系统(否则系统不 稳定),极点为实数(指数衰减项)和共轭复数(衰减正弦项) 的衰减快慢取决于极点离虚轴的距离。远,衰减的快;近,衰 减的慢。所以,近极点对瞬态响应影响大。
高阶系统分析,主导极点
系数 a j , l , l 取决于零、极点分布。有以下几种情况: 若极点远离原点,则系数小; 极点靠近一个零点,远离其他极点和零点,系数小; 极点远离零点,又接近原点或其他极点,系数大。
C(s)
(s)
1 s
(s2
n2 p3 2 ns n2 )(s
p3 )
1 s
1 s
s2
A1s A2
2 ns n2
s
A3 p3
式中:A1, A2 , A3 系)有关。
高阶系统稳定性分析(1)
在零初始状态下,对上式两边进行拉氏变换,即
(n m)
(an s n an 1s n 1 a1s a0 )C ( s) (bm s m bm1s m1 bs b0 ) R( s)
得高阶系统的闭环传递函数为
C (s) bm s m bm1s m1 b1s b0 Gc (s) n , nm n 1 R( s ) s an1s a1s a0
① 高阶系统的单位阶跃响应,是由稳态和暂态分 量组成,稳态分量决定系统的稳态精度, ② 高阶系统的响应由许多分量组成,它们与系统 的零点、极点的分布有关。各分量的动态变化过程 又与分量的极点到虚轴的距离,以及极点附近有无 零点有关。距虚轴越近,而且其附近又无零点的极 点,称其为主导极点(Leading Poles),它对应的暂 态分量对整个响应的影响最大,而其他极点对应的 分量对整个响应的影响就小。
(n m)
自动控制原理
得高阶系统的闭环传递函数为
pi是互不相等的实数根,则系统单 位阶跃响应的拉氏变换式为
自动控制原理
若n阶高阶系统有r对共轭复数极点,则有q (q=n-2r)个实数极点,此时
可得系统的单位阶跃响应为 C(s)=φ(s)R(s) 将上式进行拉氏反变换,并令ωk=1/Tk,得
自动控制原理
自动控制原理
由高阶系统的传递函数,可方便地知道系统的零点和 极点分布,根据系统主导极点的作用,便可对高阶系统进行
(1)对高阶系统的零点和极点经过主导极点处理,使 系统保留1~3个主导极点,忽略非主导极点。将高阶系统近 似处理成为一阶、二阶或三阶系统,将一阶、二阶系统的时 (2)通常认为,主导极点离虚轴的距离与非主导极点 离虚轴的距离之比小于1/5,且附近不存在零点。若极点与 零点的距离与它们本身的模之比小于1/10,则称这对零点与 极点为偶极子。与附近的零点形成偶极子的极点,对系统响 应的影响可忽略不计。 自动控制原理
高阶系统的零、极点分析
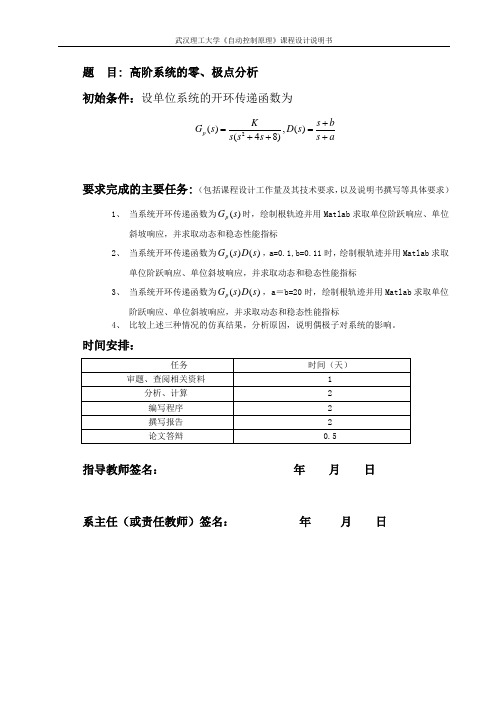
题 目: 高阶系统的零、极点分析 初始条件:设单位系统的开环传递函数为2(),()(48)p K s bG s D s s s s s a+==+++要求完成的主要任务: (包括课程设计工作量及其技术要求,以及说明书撰写等具体要求)1、 当系统开环传递函数为()p G s 时,绘制根轨迹并用Matlab 求取单位阶跃响应、单位斜坡响应,并求取动态和稳态性能指标2、 当系统开环传递函数为()()p G s D s ,a=0.1,b=0.11时,绘制根轨迹并用Matlab 求取单位阶跃响应、单位斜坡响应,并求取动态和稳态性能指标3、 当系统开环传递函数为()()p G s D s ,a =b=20时,绘制根轨迹并用Matlab 求取单位阶跃响应、单位斜坡响应,并求取动态和稳态性能指标4、 比较上述三种情况的仿真结果,分析原因,说明偶极子对系统的影响。
时间安排:指导教师签名: 年 月 日系主任(或责任教师)签名: 年 月 日摘要本次课程设计的主要任务是对高阶系统零、极点的分析。
一个控制系统的好坏,主要是从系统的稳定性、准确性和快速性三个方面来进行描述的。
此次课程设计主要是利用MATLAB绘制高阶系统的根轨迹,了解高阶系统零、极点的分布情况,求取高阶系统的单位阶跃响应和单位斜坡响应,并分析系统的动态和稳态性能指标。
通过增加系统零、极点,求解不同闭环传递函数下系统的各项性能指标,来分析总结零、极点和偶极子对于高阶系统的影响。
关键字:劳斯稳定判据根轨迹零极点稳定要求性能指标高阶系统的零、极点分析1系统稳定性分析劳斯稳定判据:系统稳定的充分必要条件是劳斯表中的第一列数的符号完全相同。
如果劳斯表中的第一列的符号不完全相同,则系统不稳定。
而且,系统正实部特征根的个数等于劳斯表第一列数的符号变化次数。
根据已知条件可知,所研究系统的开环传递函数:22()()()()(48)(48)()k p K s b K s b G s G s D s s s s s a s s s s a ++=∙=∙=++++++ 由开环传递函数可得其闭环特征方程为:432(4)(84)(8)0s a s a s a K s bK +++++++=劳斯表如下:4s 1 84a + bK 3s 4a + 8a K + 02s 2416324a a K a++-+ bK1s 224163241632[(8)(4)]44a a K a a Ka K a bK a a++-++-⨯+-+⨯++ 00s bK根据劳斯判据可知,系统稳定,则劳斯表中第一列数的符号完全相同。
3.3高阶系统的时域分析
j 1
k 1
式中,q+2r=n, q为实数极点的个数;r为共轭复数极点的对数。
部分分式展开,并设0<ζk<1,取拉氏反变换,并整理
q
r
h(t) A0
Ajesjt
B e kkt k
c os ( k
1
2 k
)t
j 1
k 1
r k 1
Ck
k
Bk kk
3、 调节时间的计算
ts
1
n
ln
2
n
si
m s1 zi
i2 n
i1 m
s1 si
zi
i2
i 1
结论:
(1)闭环零点越接近虚轴,峰值时间越小,超调量 和调节时间越大;
(2)闭环非主导极点的作用是增大峰值时间,但可 减小系统的超调量和调节时间。
高阶系统的增益常常调整到使系统具有一对闭环共轭 主导极点,这时可以用二阶系统的动态性能指标来估 算高阶系统的动态性能。
设单位反馈高阶系统具有一对共轭复数闭环主导极点: 系统单位阶跃响应的近似表达式:
s1,2 s jd , 0 1
C(s) M (s) 1 N(s) s
1
2 k
e kk t
s in( k
表明
1
2 k
)t,
t
0
(1)响应由一阶系统和二阶系统的时间响应函数项组成。当所 有闭环极点都位于左半s开平面时,系统是稳定的。
(2)零极点对系统性能的影响。
三、闭环主导极点
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
11
2012-03-16
时域分析法--高阶系统分析
6
∑ ∴ c(t ) = a0 + n1 a j e − p jt j =1
高高阶阶系系统统分分析析,,单单位位阶阶跃跃响响应应
n2
n2
∑ ∑ +
β e −ζ lωnl t l
cos ω nl
1−ζl2t +
γ
e −ζ lωnl t
l
sin
ω nl
1−ζl2t
s→0
ωn2z + 2ζωns + ωn2 ) p
=
z p
2012-03-16
时域分析法--高阶系统分析
10
小结
零、极点位置对高阶系统单位阶跃响应曲线的影响情况。 极点位置决定衰减快慢,零点和极点同时决定各项系数 的大小
主导极点 高阶系统简化为二阶系统的原则
2012-03-16
时域分析法--高阶系统分析
0 −ωn 1−ζ 2
2012-03-16
时域分析法--高阶系统分析
2
单位阶跃响应的表达式和曲线:
三三阶阶系系统统单单位位阶阶跃跃响响应应
C(s) = Φ(s) ⋅ 1 =
ωn2 p3
⋅1
s (s 2 + 2ζωn s + ωn 2 )(s + p3 ) s
=1+
A1s + A2
+ A3
s s 2 + 2ζωn s + ωn 2 s + p3
i =1 n2
, n1 + 2n2 = n, m ≤ n
∏ ∏ (s + p j ) (s 2 + 2ζ ωl nl s + ω nl 2 )
j =1
l =1
其单位阶跃响应函数为:
∑ ∑ C(s) = Φ(s) ⋅ 1 s
=
a0 s
+
n1 j =1
aj s+ pj
+
n2 l =1
βl (s + ζ lωnl ) + γ lωnl 1 − ζ l 2 s 2 + 2ζ lωnl s + ωnl 2
3
4
5
6
7
8
9
10 11 12
三阶系统单位阶跃响应曲线(阻尼系数=0.5)
由图可见,当系统阻尼系数不变时,随着实数极点向虚轴
方向移动,即随着β值下降,响应的超调量不断下降,而峰值 时间、上升时间和调节时间不断加长。
在β小于等于1时,即闭环实数极点的数值小于闭环复数 极点的实部数值时,三阶系统将表现出明显的过阻尼特性。
第四节 高阶系统分析
在控制工程中,几乎所有得控制系统都是高阶系 统,即用高阶微分方程描述的系统。
对于不能用一、二阶系统来近似的高阶系统来 说,其动态性能指标的确定是比较复杂的。
工程上常采用闭环主导极点的概念对高阶系统进 行近似分析,从而得到高阶系统动态性能指标的估算 公式。
2012-03-16
时域分析法--高阶系统分析
c(t) β = ∞ β =2
1
β = 0.1
0
图中,β = ∞ 表示无 − p3 极点,由图可 见,加入极点− p3后,当 ζ 不变时,超
ωnt 调量下降了,但调节时间增加了。
2012-03-16
时域分析法--高阶系统分析
4
h(t) 1 .4
1.2
1
0.8
0.6
0.4
β值下降
0.2
0
ωnt
0
1
2
瞬态性能指标主要由它决定。
具有主导极点的高阶系统可近似为二阶系统。
[例如]:假设 − p1,2 = −ζ1ωn1 ± jωn1
1
−
ζ
2 1
=
−σ
±
jωd
为某高阶系统的主导极点,
则单位阶跃响应近似为:
c(t) ≈ a0 + e−σt (β1 cos ω d t + γ 1 sin ω d t)
利用主导极点概念可以对高阶系统特性做近似的估计分析。
式中:θ
= tg −1
时域分析法--高阶系统分析
1−ζ 2 ζ
3
三三阶阶系系统统单单位位阶阶跃跃响响应应
[分析]:三阶系统的单位阶跃响应由三部分组成:稳态项,共
轭复极点形成的振荡分量,实极点构成的衰减指数项分量。
影响瞬态特性的有两个因素:
第一是
β = p3 ζωn
,它表示 − p3和− p1,− p2
高阶系统近似简化原则:
在近似前后,确保输出稳态值不变; 在近似前后,瞬态过程基本相差不大。
2012-03-16
时域分析法--高阶系统分析
9
例如:Φ(s)
=
(s2
+
ωn2(s + z) 2ζω n s + ω n2 )(s
+
p)
如果: z > 5以及 p > 5
ζω n
ζω n
− z −×p
1
一、典型三阶系统的瞬态响应
传递函数:
Φ(s)
=
(s
2
+
ωn2 2ζωns +ωn
2
)(Ts
+1)
,
当 0 < ζ <1 时,极点分布如下:
− p1 = −ζωn − jωn 1− ζ 2 ,
− p2 = −ζωn + jωn 1− ζ 2 ,
−
p3
=
−
1 T
−×p2
− p3×
−
×
ζω
n
− p1
ωn 1−ζ 2
2012-03-16
时域分析法--高阶系统分析
5
二、高阶系统分析
高高阶阶系系统统分分析析
高阶系统的传递函数为:
Φ(s)
=
bm s m an s n
+ +
bm−1s m−1 + ... + b0 an−1s n−1 + ... + a0
,m
≤
n
∏ 写成零极点形式:
m
kg (s + zi )
Φ(s) = n1
l =1
l =1
可见:c(t)不仅与 p j ,ζ l ,ωnl (闭环极点)有关,而且与系数
a j , βl ,γ l 有关(这些系数都与闭环零、极点有关)。
高阶系统的单分析]: 对于闭环极点全部位于s左半平面的高阶系统(否则系统不 稳定),极点为实数(指数衰减项)和共轭复数(衰减正弦项) 的衰减快慢取决于极点离虚轴的距离。远,衰减的快;近,衰 减的慢。所以,近极点对瞬态响应影响大。
则:
Φ(s) ≈
p(s2
zω n 2 + 2ζω n s + ω n2 )
×
− ζω n
×
jω d − jωd
说明:假设输入为单位阶跃函数,则化简前后的稳态值如下
Q
lim
s
⋅
1 s
⋅
(
s
2
s→0
ωn2(s + z) + 2ζωns + ωn2 )(s +
p)
=
z p
而 lim s ⋅ 1⋅ s (s2
2012-03-16
时域分析法--高阶系统分析
7
高高阶阶系系统统分分析析,,主主导导极极点点
系数 a j , βl ,γ l 取决于零、极点分布。有以下几种情况: 若极点远离原点,则运动模态的系数小; 极点靠近一个零点,远离其他极点和零点,系数小; 极点远离零点,又接近原点或其他极点,系数大。
的相对位置。
当 β >>1 时,表示− p3离虚轴远,− p1,− p2 离虚轴近,系
统的瞬态特性主要由− p1,− p2 决定,呈二阶系统的特性。
反之,当 β <<1 时,表示 − p3 离虚轴近,− p1,− p2 离虚轴远, 系统的瞬态特性主要由 − p3决定,呈一阶系统的特性。
第二个因素是阻尼系数,同前。如下图所示:
衰减慢且系数大的项在瞬态过程中起主导作用。
[主导极点]:满足下列条件的极点称为主导极点。
存在一对离虚轴最近的共轭极点; 附近无零点; 其他极点距虚轴的距离是它的5倍以上。
2012-03-16
时域分析法--高阶系统分析
8
主主导导极极点点及及应应用用
主导极点在c(t)中的对应项衰减最慢,系数最大,系统的
式中: A1, A2 , A3 与
ζ ,ωn, β
= p3
ζωn
有关。
(与实极点与共轭极点的位置关系有关)
∴ c(t ) = 1 − A1e −ζω nt sin( ω n 1 − ζ 2 t − θ ) 1−ζ 2
2012-03-16
+
A2e −ζωnt sin ωn ωn 1−ζ
1−ζ
2
2t
+
A3e − p3t