MATLAB实验三_线性系统的根轨迹
实验五 利用MATLAB绘制系统根轨迹

实验五利用MATLAB绘制系统根轨迹一、实验目的(1)熟练掌握使用MA TLAB绘制控制系统零极点图和根轨迹图的方法;(2)熟练使用根轨迹设计工具SISO;(2)学会分析控制系统根轨迹的一般规律;(3)利用根轨迹图进行系统性能分析;(4)研究闭环零、极点对系统性能的影响。
二、实验原理及内容1、根轨迹与稳定性当系统开环增益从变化时,若根轨迹不会越过虚轴进入s右半平面,那么系统对所有的K值都是稳定的;若根轨迹越过虚轴进入s右半平面,那么根轨迹与虚轴交点处的K值,就是临界开环增益。
应用根轨迹法,可以迅速确定系统在某一开环增益或某一参数下的闭环零、极点位置,从而得到相应的闭环传递函数。
2、根轨迹与系统性能的定性分析1)稳定性。
如果闭环极点全部位于s左半平面,则系统一定是稳定的,即稳定性只与闭环极点的位置有关,而与闭环零点位置无关。
2)运动形式。
如果闭环系统无零点,且闭环极点为实数极点,则时间响应一定是单调的;如果闭环极点均为复数极点,则时间响应一般是振荡的。
3)超调量。
超调量主要取决于闭环复数主导极点的衰减率,并与其它闭环零、极点接近坐标原点的程度有关。
4)调节时间。
调节时间主要取决于最靠近虚轴的闭环复数极点的实部绝对值;如果实数极点距虚轴最近,并且它附近没有实数零点,则调节时间主要取决于该实数极点的模值。
5)实数零、极点影响。
零点减小闭环系统的阻尼,从而使系统的峰值时间提前,超调量增大;极点增大闭环系统的阻尼,使系统的峰值时间滞后,超调量减小。
而且这种影响将其接近坐标原点的程度而加强。
【自我实践5-1】在实验内容(2)中控制系统的根轨迹上分区段取点,构造闭环系统传递函数,分别绘制其对应系统的阶跃响应曲线,并比较分析。
1:阻尼比=0.00196,k=5.942:阻尼比=0.246,k=2.163:阻尼比=0.669 k=0.6694:阻尼比=1.0,k=0,3855:阻尼比=1.2(无此阻尼,取-0.2),k=24.5将数据填入实验数据记录表中。
控制系统MATLAB仿真2-根轨迹仿真
Gk ( s)
k g ( s 0.5) s( s 1)( s 2)( s 5)
绘制系统的根轨迹,确定当系统稳定时,参数kg 的取值范围。 num=[1 0.5]; den=conv([1 3 2],[1 5 0]); G=tf(num,den); K=0:0.05:200; rlocus(G,K) [K,POLES]= rlocfind(G) figure(2) Kg=95; t=0:0.05:10; G0=feedback(tf(Kg*num,den),1); step(G0,t)
Root Locus 8
8 6 4 2 0 -2 -4 -6 -8 -8 x x x
6
4
2
Imaginary Axis
0
-2
-4
-6
-8 -8
-6
-4
-2
0 Real Axis
2
4
6
8
-6
-4
-2
0
2
4
6
8
(a) 直接绘制根轨迹
(b) 返回参数间接绘制根轨迹
图1 例1系统根轨迹
二、MATLAB根轨迹分析实例
用户可以通过Control Architecture窗口进行系 统模型的修改,如图9。
图9 rltool工具Control Architecture窗口
也可通过System Data窗口为不同环节导入已 有模型,如图10。
图10 rltool工具System Data窗口
可以通过Compensator Editor的快捷菜单进行 校正环节参数的修改,如增加或删除零极点、 增加超前或滞后校正环节等,如图11。
Step Response 2 1.8 1.6 1.4 1.2
《自动控制原理》第4章 线性系统的根轨迹法
68
4.5 广义根轨迹
根轨迹部分是个半圆,半径是 k *
证明:根轨迹上一点S满足相角条件
s (s j2) (s j2)
代入s j
( j) ( j( 2)) ( j( 2))
arctan arctan 2 arctan 2
K* G(s)
s(s 2)(s 1)
26
法则五:根轨迹的分离点与分离角
分离点:几条根轨迹在[s]某一点相遇后又分开 的点。
说明有重根
27
实轴上的分离点(常见)
如果根轨迹位于实轴上相邻的两个开环极点之间, 其中一个可以是无限极点,则在这两个极点之间至 少存在一个分离点;
如果根轨迹位于实轴上相邻的两个开环零点之间, 其中一个可以是无限零点,则在这两个零点之间至 少存在一个分离点;
开环极点:
p1 0 p2 0 p3 2 p4 5
(2)实轴上的根轨迹 (3)根轨迹分支数
4
59
G0 ( s)
s2(s
k* 2)(s
5)
(4)渐近线
4条
渐近线与实轴的夹角
a
4
3
4
3
4
4
渐近线与实轴的交点(σa , 0)
4
pi
a
i 1
4
1.75
60
G0 ( s)
s2(s
k* 2)(s
法则二:根轨迹的分支数,对称性和 连续性
• 根轨迹的分支数与开环有限零点数m和有限 极点数n中的大者相等,它们是连续的并且 对称于实轴。
22
法则三:根轨迹的渐近线(n>m)
• 当开环有限零点数m小于有限极点数n时, 有n-m条根轨迹分支沿着与实轴交点 ,
实验五根轨迹分析
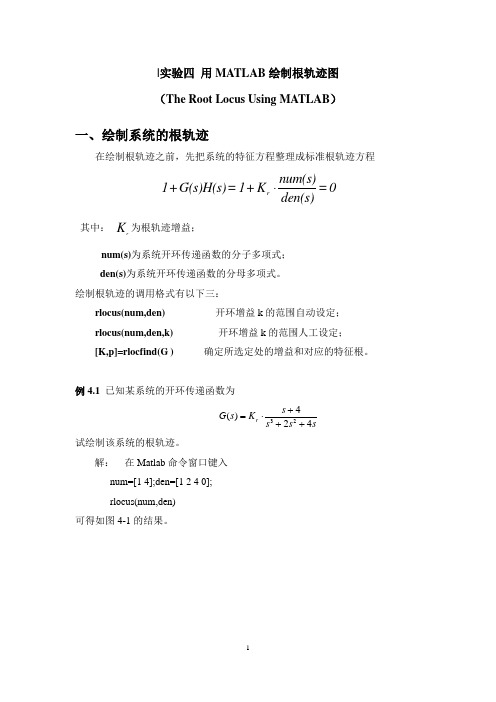
|实验四 用MATLAB 绘制根轨迹图 (The Root Locus Using MATLAB )一、绘制系统的根轨迹在绘制根轨迹之前,先把系统的特征方程整理成标准根轨迹方程r num(s)1+G(s)H(s)=1+K =0den(s)⋅其中:rK为根轨迹增益;num(s)为系统开环传递函数的分子多项式;den(s)为系统开环传递函数的分母多项式。
绘制根轨迹的调用格式有以下三:rlocus(num,den) 开环增益k 的范围自动设定; rlocus(num,den,k) 开环增益k 的范围人工设定; [K,p]=rlocfind(G ) 确定所选定处的增益和对应的特征根。
例4.1 已知某系统的开环传递函数为s s s s K s r 424)(23+++⋅=G试绘制该系统的根轨迹。
解: 在Matlab 命令窗口键入 num=[1 4];den=[1 2 4 0]; rlocus(num,den)可得如图4-1的结果。
-5-4-3-2-11-10-8-6-4-20246810Real AxisI m a g i n a r y A x i sRoot Locus图4-1由于采用rlocus()函数绘制根轨迹时,不同的根轨迹分支之间只区分颜色而不区分线形,所以打印时是不容易分辨各个分支的,需要在运行Matlab 程序时注意观察曲线的颜色。
■例4-2 若要求例4-1中的r K 在1到10之间变化,绘制相应的根轨迹。
解 在MATLAB 命令窗口键入 num=[1 4];den=[1 2 4 0];k=[1:0.5:10]; rlocus(num,den,k)可得如图4-2.的结果。
-4.5-4-3.5-3-2.5-2-1.5-1-0.500.5Root LocusReal AxisI m a g i n a r y A x i s图4-2例4-3 设系统的开环传递函数为)22)(3(()(2+++=s s s K s s rs H G )试绘制其闭环系统的根轨迹图并在图上找出几点的相关数据。
Matlab仿真实验教程

MATLAB的实验仿真目录实验一MATLAB在控制系统模型建立与仿真中的应用 (1)实验二典型系统的时域响应分析 (13)实验三线性控制系统的根轨迹与频域分析 (17)实验四线性系统的校正 (22)附录一 MATLAB6.5 控制系统工具箱函数和结构化的控制语句 (30)附录二 SIMULINK 基本模块介绍 (34)实验一MATLAB 在控制系统模型建立与仿真中的应用一、MATLAB 基本操作与使用1. 实验目的1) 掌握MATLAB 仿真软件的安装及启动,熟悉MATLAB工作环境平台。
2) MATLAB 命令窗口,包括工具条以及菜单选项的使用;MATLAB 语言的基本规定,包括数值的表示、变量命名规定、基本运算符、预定义变量以及表达式等。
3) MATLAB图形绘制功能、M 文件程序设计和线性控制系统传递函数模型的建立等。
2. 实验仪器PC计算机一台,MATLAB软件1套3. 实验内容1) MATLAB 的启动这里介绍MATLAB 装入硬盘后,如何创建MATLAB 的工作环境。
方法一MATLAB 的工作环境由matlab.exe 创建,该程序驻留在文件夹matlab\bin\中。
它的图标是matlab。
只要从<我的电脑>或<资源管理器>中去找这个程序,然后双击此图标,就会自动创建如图1所示的MATLAB6.5 版的工作平台。
Command Window图1 在英文Windows 平台上的MATLAB6.5 MATLAB工作平台方法二假如经常使用MATLAB,则可以在Windows 桌面上创建一个MATLAB 快捷方式图标。
具体办法为:把<我的电脑>中的matlab 图标用鼠标点亮,然后直接把此图标拖到Windows桌面上即可。
此后,直接双击Windows 桌面上的matlab 图标,就可建立图1所示的MATLAB工作平台。
2) MATLAB工作环境平台桌面平台是各桌面组件的展示平台,默认设置情况下的桌面平台包括 6 个窗口,具体如下:① MATLAB 窗口MATLAB6 比早期版本增加了一个窗口。
自动控制仿真作业

兰州理工大学《自动控制原理》MATLAB分析与设计仿真实验报告院系:电信学院班级:自动化(4)班姓名:罗庆学学号:09220420时间:2011年11月22日电气工程与信息工程学院《自动控制原理》MATLAB分析与设计仿真实验任务书(2010)一.仿真实验内容及要求:1.MATLAB软件要求学生通过课余时间自学掌握MATLAB软件的基本数值运算、基本符号运算、基本程序设计方法及常用的图形命令操作;熟悉MATLAB仿真集成环境Simulink的使用。
2.各章节实验内容及要求1)第三章线性系统的时域分析法∙对教材P136.3-5系统进行动态性能仿真,并与忽略闭环零点的系统动态性能进行比较,分析仿真结果;∙对教材P136.3-9系统的动态性能及稳态性能通过的仿真进行分析,说明不同控制器的作用;∙在MATLAB环境下完成英文讲义P153.E3.3。
∙对英文讲义中的循序渐进实例“Disk Drive Read System”,在100K时,试采=a用微分反馈使系统的性能满足给定的设计指标。
2)第四章线性系统的根轨迹法∙在MATLAB环境下完成英文讲义P157.E4.5;∙利用MATLAB绘制教材P181.4-5-(3);∙在MATLAB环境下选择完成教材第四章习题4-10或4-18,并对结果进行分析。
3)第五章线性系统的频域分析法利用MATLAB绘制本章作业中任意2个习题的频域特性曲线;4)第六章线性系统的校正利用MATLAB选择设计本章作业中至少2个习题的控制器,并利用系统的单位阶跃响应说明所设计控制器的功能。
5)第七章线性离散系统的分析与校正∙利用MATLAB完成教材P383.7-20的最小拍系统设计及验证。
∙利用MATLAB完成教材P385.7-25的控制器的设计及验证。
二.仿真实验时间安排及相关事宜1.依据课程教学大纲要求,仿真实验共6学时,教师可随课程进度安排上机时间,学生须在实验之前做好相应的准备,以确保在有限的机时内完成仿真实验要求的内容;2.实验完成后按规定完成相关的仿真实验报告;3.仿真实验报告请参照有关样本制作并打印装订;4.仿真实验报告必须在本学期第15学周结束之前上交授课教师。
根轨迹法(自动控制原理)

i1
l 1
nm
规则4:实轴上的根轨迹
➢ 实轴上的开环零点和开环极点将实轴分为若干段,对其中任一段,如果其右
边实轴上的开环零、极点总数是奇数,那么该段就一定是根轨迹的一部分。
❖ 该规则用相角条件可以证明,设实轴上有一试验点s0。 ➢ 任一对共轭开环零点或共轭极点(如p2,p3),与其对应的相角(如θ2,θ3)
第四章 根轨迹法
4.1 根轨迹的基本概念 4.2 绘制典型根轨迹 4.3 特殊根轨迹图 4.4 用MATLAB绘制根轨迹图 4.5 控制系统的根轨迹分析
内容提要
➢ 根轨迹法是一种图解法,它是根据系统的开环零 极点分布,用作图的方法简便地确定闭环系统的 特征根与系统参数的关系,进而对系统的特性进 行定性分析和定量计算。
规则3:渐近线
❖ 当n>m时,根轨迹一定有n-m支趋向无穷远;当n<m时,根轨迹一定有m-n支 来自无穷远。可以证明:
➢ 当n≠m时,根轨迹存在|n-m|支渐近线,且渐近线与实轴的夹角为:
所有渐近线交于k实轴上(2的k一n点1,)m1其8坐00标,为 k 0,1,2,,| n m | 1
n
m
pi zl
之和均为360°,也就是说任一对共轭开环零、极点不影响实轴上试验点s0的相 角条件。
➢ 对于在试验点s0左边实轴上的任一开环零、极点,与其对应的相角(如θ4,φ3) 均为0。
➢ 而试验点s0右边实轴上任一开环零、极点,与其对应的相角(如θ1,φ1,φ2) 均为180°。
所以要满足相角条件,s0右边实轴上的开环零、极点总数必须是奇数。
❖ 1948年伊凡思(W.R.Evans)提出了根轨迹法,它不 直接求解特征方程,而用图解法来确定系统的闭环 特征根。
第四章 根轨迹法 matlab simulink与控制系统仿真 第三版 课件
二、根轨迹对称于实轴
闭环极点为 实数→在实轴上 复数→共轭→对称于实轴
返回子目录
28
三、根轨迹的起点与终点
起于开环极点,终于开环零点。
由根轨迹方程有:
m
i 1 n
(s (s
zi ) pi)
1 K*
i1
29
起点 K* 0 → spi 0→ s pi
终点 K* → szi 0 → s zi
n
1
m
1
i1 dpi j1 dzj
z 式中: j 为各开环零点的数值;
p i 为各开环极点的数值。
50
例4-6
•已知系统的开环传递函数
G(s)H(s) K*(s1) s23s3.25
试求闭环系统的根轨迹分离点坐标d,并概 略绘制出根轨迹图。
51
解:根据系统开环传递函数求出开环极点
p 1 1 .5j1 ,p 2 1 .5j1
• 在实际应用中,用相角方程绘制根轨迹, 而模值方程主要用来确定已知根轨迹上某一点
的 K * 值。
20
例4-1
已知系统的开环传递函数 G (s)H (s)2K/(s2)2
试证明复平面上点 s1 2j4 ,s2 2j4 是该系统的闭环极点。
证明: 该系统的开环极点 p1 2, p2 2
若系统闭环极点为 s1 , s2
分离角计算公式
d1 l[2 (k1)π jm 1
n
dzj dsi]
il1
(4-45)
56
式中:
d 为分离点坐标;
z j为开环零点; si为当 kkd时,l除 个重极点外 其他 nl个非重根。
所谓会合角是指根轨迹进入重极点处 的切线与实轴正方向的夹角。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
武汉工程大学实验报告
专业班号
组别 01 指导教师
姓名同组者(个人)
选定图中根轨迹与虚轴的交点,单击鼠标左键得: selected_point =
0.0059 + 9.8758i
k =
选定图中根轨迹与虚轴的交点,单击鼠标左键得:
selected_point =
0.0237 + 8.3230i
k =
第二步、添加共轭极点-3+j2和-3-j2得到G(s)=1/[s(s2+2s+2)( s2+6s+13)]得其单位阶跃响应波形为
然后逐步添加如下:
第一步、添加共轭极点-6+j8和-6-j8得到G(s)=1/[(s+1)(s2+12s+100)],运行后可得其单位阶跃响应波形为
第三步、添加零点-12得到G(s)=(s+12)/[(s+1)(s2+12s+100)(s+10)], 运行后可得其单位阶跃响应波形为
然后逐步添加如下:
第一步、添加极点-1/0.0714得到G(s)=1/[s(0.0714s+1)], 运行后可得其单位阶跃响应
第三步、添加极点-20得到G(s)=1/[s(0.0714s+1)( 0.012s2+0.1s+1)(0.05s+1)],运行后可得
要求:正文用小四宋体,1.5倍行距,图表题用五号宋体,图题位于图下方,表题位于表上方。