基于MATLAB的车牌定位系统(含全套CAD图纸)
(完整版)基于matlab的车牌识别(含子程序)
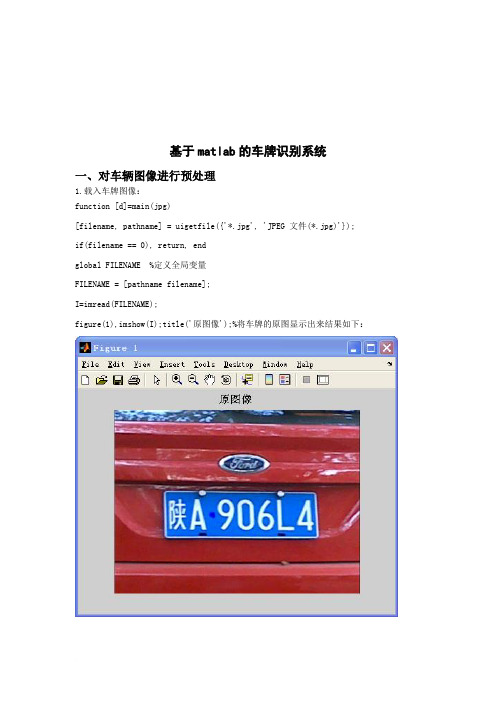
基于matlab的车牌识别系统一、对车辆图像进行预处理1.载入车牌图像:function [d]=main(jpg)[filename, pathname] = uigetfile({'*.jpg', 'JPEG 文件(*.jpg)'});if(filename == 0), return, endglobal FILENAME %定义全局变量FILENAME = [pathname filename];I=imread(FILENAME);figure(1),imshow(I);title('原图像');%将车牌的原图显示出来结果如下:2.将彩图转换为灰度图并绘制直方图:I1=rgb2gray(I);%将彩图转换为灰度图figure(2),subplot(1,2,1),imshow(I1);title('灰度图像');figure(2),subplot(1,2,2),imhist(I1);title('灰度图直方图');%绘制灰度图的直方图结果如下所示:3. 用roberts算子进行边缘检测:I2=edge(I1,'roberts',0.18,'both');%选择阈值0.18,用roberts算子进行边缘检测figure(3),imshow(I2);title('roberts 算子边缘检测图像');结果如下:4.图像实施腐蚀操作:se=[1;1;1];I3=imerode(I2,se);%对图像实施腐蚀操作,即膨胀的反操作figure(4),imshow(I3);title('腐蚀后图像');5.平滑图像se=strel('rectangle',[25,25]);%构造结构元素以正方形构造一个seI4=imclose(I3,se);% 图像聚类、填充图像figure(5),imshow(I4);title('平滑图像');结果如下所示:6. 删除二值图像的小对象I5=bwareaopen(I4,2000);% 去除聚团灰度值小于2000的部分figure(6),imshow(I5);title('从对象中移除小的对象');结果如下所示:二、车牌定位[y,x,z]=size(I5);%返回I5各维的尺寸,存储在x,y,z中myI=double(I5);%将I5转换成双精度tic %tic表示计时的开始,toc表示计时的结束Blue_y=zeros(y,1);%产生一个y*1的零阵for i=1:yfor j=1:xif(myI(i,j,1)==1)%如果myI(i,j,1)即myI的图像中坐标为(i,j)的点值为1,即该点为车牌背景颜色蓝色 %则Blue_y(i,1)的值加1Blue_y(i,1)= Blue_y(i,1)+1;%蓝色像素点统计endendend[temp MaxY]=max(Blue_y);%Y方向车牌区域确定%temp为向量white_y的元素中的最大值,MaxY为该值的索引PY1=MaxY;while ((Blue_y(PY1,1)>=5)&&(PY1>1))PY1=PY1-1;endPY2=MaxY;while ((Blue_y(PY2,1)>=5)&&(PY2<y))PY2=PY2+1;endIY=I(PY1:PY2,:,:);%x方向车牌区域确定%%%%%% X方向 %%%%%%%%%Blue_x=zeros(1,x);%进一步确定x方向的车牌区域for j=1:xfor i=PY1:PY2if(myI(i,j,1)==1)Blue_x(1,j)= Blue_x(1,j)+1; endendendPX1=1;while ((Blue_x(1,PX1)<3)&&(PX1<x))PX1=PX1+1;endPX2=x;while ((Blue_x(1,PX2)<3)&&(PX2>PX1))PX2=PX2-1;endPX1=PX1-1;%对车牌区域的校正PX2=PX2+1;dw=I(PY1:PY2-8,PX1:PX2,:);t=toc;figure(7),subplot(1,2,1),imshow(IY),title('行方向合理区域');%行方向车牌区域确定figure(7),subplot(1,2,2),imshow(dw),title('定位裁剪后的车牌彩色图像');的车牌区域如下所示:三、字符分割及处理1.车牌的进一步处理对分割出的彩色车牌图像进行灰度转换、二值化、均值滤波、腐蚀膨胀以及字符分割以从车牌图像中分离出组成车牌号码的单个字符图像,对分割出来的字符进行预处理(二值化、归一化),然后分析提取,对分割出的字符图像进行识别给出文本形式的车牌号码。
基于matlab图像处理的车牌识别系统_毕业设计论文

基于matlab图像处理的车牌识别系统目录摘要 (1)第一章绪论 (3)1.1研究背景及意义 (3)1.2车牌系统简介 (4)1.2.1国内外现状 (5)1.2.2车牌识别难点 (6)1.3 MATLAB的简介 (7)1.3 MATLAB语言特点 (8)第二章图像预处理 (8)2.1 图像采集 (8)2.2 图像预处理 (9)2.2.1 图像灰度化 (9)2.2.2 图像增强 (11)第三章车牌定位与分割 (12)3.1 车牌定位 (13)3.2 车牌分割 (17)3.3 车牌进一步处理 (17)第四章字符分割和归一化 (18)4.1 字符分割 (19)4.2 字符归一化 (19)4.3 字符识别 (20)第五章汽车号牌识别系统实现与分析 (22)5.1 系统实现 (22)5.2 系统分析 (25)总结 (28)参考文献 (29)致谢 (30)摘要随着二十一世纪到来,经济快速发展和人们生活水平显著提高,汽车逐渐成为家庭的主要交通工具。
汽车的产量快速增多,车辆流动也变得越来越频繁,因此给交通带来了严重问题,如交通堵塞、交通事故等,智能交通系统(Intelligent Transportation System)的产生就是为了从根本上解决交通问题。
在智能交通系统中车牌识别技术占有重要位置,车牌识别技术的推广普及必将对加强道路管理、城市交通事故、违章停车、处理车辆被盗案件、保障社会稳定等方面产生重大而深远的影响。
该设计主要研究基于MATLAB软件的汽车号牌设别系统设计,系统主要包括图像采集、图像预处理、车牌定位、字符分割、字符识别五大核心部分。
系统的图像预处理模块是将图像经过图像灰度化、图像增强、边缘提取、二值化等操作,转换成便于车牌定位的二值化图像;利用车牌的边缘、形状等特征,再结合Roberts 算子边缘检测、数字图像、形态学等技术对车牌进行定位;字符的分割采用的方法是将二值化后的车牌部分进行寻找连续有文字的块,若长度大于设定的阈值则切割,从而完成字符的分割;字符识别运用模板匹配算法完成。
如何使用Matlab技术进行车牌识别

如何使用Matlab技术进行车牌识别车牌识别技术是一种在现代交通管理、安保等领域应用广泛的技术。
通过使用Matlab软件,我们可以轻松实现车牌识别功能。
本文将介绍如何使用Matlab技术进行车牌识别。
一、图像预处理在进行车牌识别之前,首先需要对图像进行预处理。
图像预处理的目的是提取车牌信息并减小噪声干扰。
在Matlab中,我们可以使用一系列图像处理函数来实现图像预处理,包括图像二值化、边缘检测、形态学操作等。
这些函数可以帮助我们提取车牌轮廓,并去除背景和噪声。
二、车牌定位车牌定位是车牌识别的关键步骤之一。
通过车牌定位,我们可以找到图像中的车牌区域,并将其与其他区域进行区分。
在Matlab中,可以使用图像分割、形态学滤波等技术来实现车牌定位。
这些技术可以帮助我们提取车牌的形状、颜色和纹理等特征,并将其与其他区域进行区分。
三、字符分割一旦我们成功地定位了车牌区域,就需要将车牌中的字符进行分割。
字符分割是车牌识别中的一个重要环节。
通过将车牌中的字符进行分割,我们可以得到单个字符的图像,为后续的字符识别做准备。
在Matlab中,可以使用一系列图像处理函数来实现字符分割,包括边缘检测、连通性分析和投影分析等。
这些函数可以帮助我们将车牌中的字符与其他区域进行分离。
四、字符识别字符识别是车牌识别的核心任务。
通过对字符进行识别,我们可以得到车牌中的文本信息。
在Matlab中,可以使用模式识别、神经网络或者深度学习等技术来实现字符识别。
这些技术可以帮助我们训练一个分类器,将字符图像与对应的字符进行匹配。
通过匹配算法,我们可以得到车牌的文本信息。
五、车牌识别结果展示在进行车牌识别之后,我们可以将识别结果进行展示。
通过将识别结果与原始图像进行对比,我们可以验证车牌识别的准确性。
在Matlab中,可以使用图像绘制函数和文本显示函数来实现车牌识别结果的展示。
通过这些函数,我们可以在原始图像中标注出识别结果,并将结果显示在图像上。
基于MATLAB的车牌识别系统设计与实现
基于MATLAB的车牌识别系统设计与实现刘忠杰;宋小波;何锋;李芬;周培莹;刘百辰【摘要】This paper introduced a design and experimental simulation method of license plate recognition system based on the research of license plate location,license plate character segmentation and license plate character recognition.This method firstly located%通过对车牌定位、车牌字符分割和车牌字符识别进行研究,提出了一种车牌识别系统的设计和实验仿真方法。
该方法首先采用基于Canny算子边缘检测和数学形态学相结合的方法定位出车牌,进行二值化、滤波和形态学开运算后使用投影二分法分割出7个车牌字符,最后使用模板匹配和特征统计相结合的方法识别出车牌字符。
试验表明该方法是有效的、可行的,与传统使用单一算法相比较,该方法大大提高了车牌识别系统的正确率。
【期刊名称】《微型机与应用》【年(卷),期】2011(030)014【总页数】4页(P37-40)【关键词】图像预处理;车牌定位;车牌字符分割;车牌字符识别【作者】刘忠杰;宋小波;何锋;李芬;周培莹;刘百辰【作者单位】常州先进制造技术研究所机器人系统实验室,江苏常州213164;常州先进制造技术研究所机器人系统实验室,江苏常州213164;常州先进制造技术研究所机器人系统实验室,江苏常州213164;常州先进制造技术研究所机器人系统实验室,江苏常州213164;常州先进制造技术研究所机器人系统实验室,江苏常州213164;常州先进制造技术研究所机器人系统实验室,江苏常州213164【正文语种】中文【中图分类】TP391.43随着世界经济和科学技术的不断发展,智能交通系统越来越多地被人们所关注。
基于MATLAB的车牌识别系统的源代码(可以实现)
k=input('Enter the file name:','s');%输入车牌照片im=imread(k);imshow(im);im_gray=rgb2gray(im);im_gray=medfilt2(im_gray,[3,3]);%对图像进行中值滤波Image=im2bw(im_gray,0.2);BW=edge(im_gray,'sobel');%找出图像边缘[imx,imy]=size(BW);%计算图像大小msk=[0 0 0 0 0;0 1 1 1 0;0 1 1 1 0;0 1 1 1 0;0 0 0 0 0;];B0=conv2(double(BW),double(msk));%对边缘区域进行加强se=ones(2,80);B1=imdilate(B0,se);%figure;%imshow(B1);B2=imerode(B1,se);%figure;%imshow(B2);se=ones(20,2);B3=imdilate(B2,se);%figure;imshow(B3);B4=imerode(B3,se);%figure;imshow(B4);se=ones(50,2);B5=imdilate(B4,se);%figure;imshow(B5);B6=imerode(B5,se);%figure;imshow(B6);%对边界图进行小区域连通,使车牌区域连通为一个方块[B,L]=bwboundaries(B6,4);imshow(label2rgb(L,@jet,[.5 .5 .5]))%对连通区域进行标记hold onfor k=1:length(B)%用线条给连通区域标上边界线boundary=B{k};plot(boundary(:,2),boundary(:,1),'w','LineWidth',2)endstats=regionprops(L,'Area','Centroid');%找到每个连通域的质心for k=1:length(B)%循环遍历每个连通域的边界boundary=B{k};%获取一条边界上的所有点delta_sq=diff(boundary).^2;perimeter=sum(sqrt(sum(delta_sq,2)));%计算边界周长area=stats(k).Area;%获取边界所围面积metric=27*area/perimeter^2;%计算匹配度metric_string=sprintf('%2.2f',metric);%要显示的匹配度字串if metric>=0.85&&metric<=1.15&&area>1000%截取出匹配度接近1且面积大于1000像素的连通域centroid=stats(k).Centroid;plot(centroid(1),centroid(2),'ko');%提取该连通域所对应在二值图像中的矩形区域goalboundary=boundary;s=min(goalboundary,[],1);e=max(goalboundary,[],1);goal=imcrop(Image,[s(2) s(1) e(2)-s(2) e(1)-s(1)]);endtext(boundary(1,2)-35,boundary(1,1)+13,metric_string,'Color','g','FontSize',14,'FontWeight','bold') ;%显示匹配度字串endgoal=~goal;%对截取图像进行反色处理figure;imshow(goal);[a,b]=size(goal);for i=a/2:-1:1 %从图像水平中轴开始向上扫描,当白点数少于每行总点数的1/10时,停止扫描,并将该行定义为车牌字符区域的上限num=0;for j=1:bif goal(i,j)==1num=num+1;endendif num<(b*0.1)line_up=i;break;endendfor i=a/2:a %从图像水平中轴开始向下扫描,当白点数少于每行总点数的1/10时,停止扫描,并将该行定义为车牌字符区域的下限num=0;for j=1:bif goal(i,j)==1num=num+1;endendif num<(b*0.1)line_down=i;break;endendgoal=goal(line_up:line_down,1:b);%根据之前定义的上下限截取车牌字符区域figure;imshow(goal);%显示车牌字符区域[a,b]=size(goal);row=zeros(18);now=1;flag=0;for j=1:b %对截取出的字符区域进行竖列扫描,并取每列总点数的1/10作为阈值点,当每列的白点数从阈值以上掉落到阈值以下或从阈值以下上升到阈值以上时,记录该列的横坐标num=0;for i=1:aif goal(i,j)==1num=num+1;endendif flag==0if num<0.1*arow(now)=j;now=now+1;flag=1;endelseif num>0.1*arow(now)=j;now=now+1;flag=0;endendendif row(3)-row(2)>10 %判断扫描出的第二块区域(扫描到的第二列与第三列之间)是否包含有效字符,如包含,则将扫描到的第二列定义为字符分割的起始列;否则,则定义第一列为起始列now=2;elsenow=1;endfigure;l1=0;l2=0;for k=1:8m=row(now);n=row(now+1);temp=goal(1:a,m:n);point=0;%扫描每一个字符图片的白点数for i=1:afor j=1:n-mif temp(i,j)==1point=point+1;endendendif point>0.4*a*(n-m)&&n>m %当扫描到的白点数小于总点数的2/5时放弃输出(有可能是车牌上的点状分隔符)l2=l2+1;%l2用来记录识别出的字符数subplot(1,7,l2);x(k)=code(temp);%调用子程序进行字符扫描,并返回字符的ASCII码x(k)=uint8(x(k));if x(k)>0 %当所选区域不为空时进行输出l1=l1+1;%l1用来记录输出的字符数s(l1)=char(x(k));endtemp(32,32)=0;imshow(temp);endnow=now+2;endy=char(s);%将得到的ASCII码重新转换为字符并在屏幕上输出fprintf('\r\n该车辆的车牌号为:\r\n');disp(y);fprintf('\r\n输出的字符数为:%4d\r\n',l1);fprintf('识别出的字符数为:%4d\r\n',l2);。
(完整版)MATLAB车牌识别
目录1.引言 (2)2.设计概述 (3)2.1车牌识别技术 (3)2.2 车牌识别技术的发展 (3)2.3 车牌识别技术的国内外研究现状 (4)2.4 主要应用领域 (6)3.设计方案 (7)4.车牌识别系统的matlab实现 (8)4.1 图像的读取 (8)4.2 图像预处理 (9)4.2.1灰度变换 (9)4.2.2 图像校正 (10)4.3 牌照分割 (10)4.3.1 图像边缘提取及二值化 (11)4.3.2 BP神经网络 (14)4.4 车牌提取 (15)5.设计结果及分析 (16)5.1程序运行结果 (16)5.2程序结果分析 (17)总结体会 (18)参考文献 (19)附录1 (20)附录2 (28)1.引言伴随着世界各国车辆数量的增加,城市交通状况日益受到人们的重视。
如何有效地进行交通管理,越来越成为各国政府的相关部门所关注的焦点。
针对这一问题,人们运行先进的信息处理技术、导航定位技术、无线通信技术、自动控制技术、图像处理和识别技术及计算机网络技术等科学技术,相继研发了各种交通道路监视管理系统、车辆控制系统及公共交通系统。
这些系统将车辆和道路综合起来进行考虑,运行各种先进的技术解决道路交通的问题,统称为智能交通系统( Intelligent Transportation System,简称ITS)。
ITS 是20世纪90年代兴起的新一代交通运输系统。
它可以加强道路、车辆、驾驶员和管理人员的联系,实现道路交通管理自动化和车辆行驶的智能化,增强交通安全,减少交通堵塞,提高运输效率,减少环境污染,节约能源,提高经济活力。
智能交通系统以车辆的自动检测作为信息的来源,因而对车牌照等相关信息的自动采集和处理的一门新的交通信息获取技术——车牌识别(License Plate Recognition ,LPR) 技术逐渐发展起来,成为信息处理技术的一项重要研究课题。
车牌自动识别是智能交通管理系统中的关键技术之一。
车牌识别的matlab程序的难点与解决方法(一)
车牌识别的matlab程序的难点与解决方法(一)车牌识别的matlab程序的难点与解决引言车牌识别是图像处理领域的一个重要应用,它可以在不同场景下自动识别和提取车辆的车牌信息。
在实际应用中,针对车牌识别的matlab程序存在着一些难点,本文将详细介绍这些难点及相应的解决方法,以帮助资深的创作者更好地实现车牌识别程序。
难点一:车牌识别算法选择子标题一:基于颜色特征的车牌识别算法•难点:车牌颜色在不同光照条件下会发生变化,导致识别算法的准确性下降。
•解决方法:采用颜色空间的变换(例如RGB到HSV),通过调整阈值和颜色范围,去除非车牌区域的干扰。
子标题二:基于边缘检测的车牌识别算法•难点:车牌边缘与周围物体边缘相似,容易造成误判。
•解决方法:利用形态学操作(如膨胀和腐蚀)来实现边缘闭合,并通过设定合适的阈值对边缘进行提取,降低误判概率。
子标题三:基于字符分割的车牌识别算法•难点:字符之间存在粘连和重叠情况,增加了字符分割的难度。
•解决方法:基于连通区域分析的方法,通过计算字符之间的间距和像素个数,对重叠和粘连的字符进行分割。
难点二:噪声影响的处理子标题一:图像预处理•难点:采集到的车牌图像可能存在噪声和模糊问题。
•解决方法:使用图像增强算法(如直方图均衡化和高斯滤波)对车牌图像进行预处理,提高图像的质量。
子标题二:光照不均匀的情况•难点:车牌图像在不同光照条件下会出现明暗不均的问题。
•解决方法:使用自适应阈值化算法,根据图像局部区域的光照情况对图像进行二值化处理,提高车牌识别的准确性。
难点三:多样化的车牌样式和字体子标题一:车牌样式的差异•难点:不同地区和不同国家的车牌样式存在差异,增加了车牌识别的难度。
•解决方法:基于模板匹配的方法,通过建立车牌模板库,对不同样式的车牌进行匹配比对,提高识别的准确性。
子标题二:字体的多样性•难点:不同车牌使用的字体风格各不相同。
•解决方法:使用字符特征提取算法,通过对字符轮廓和特征点的统计分析,识别不同字体的字符。
基于Matlab的车牌识别(完整版)
基于Matlab的车牌识别摘要:车牌识别技术是智能交通系统的重要组成部分,在近年来得到了很大的发展。
本文从预处理、边缘检测、车牌定位、字符分割、字符识别五个方面,具体介绍了车牌自动识别的原理。
并用MATLAB软件编程来实现每一个部分,最后识别出汽车车牌。
一、设计原理车辆车牌识别系统的基本工作原理为:将摄像头拍摄到的包含车辆车牌的图像通过视频卡输入到计算机中进行预处理,再由检索模块对车牌进行搜索、检测、定位,并分割出包含车牌字符的矩形区域,然后对车牌字符进行二值化并将其分割为单个字符,然后输入JPEG或BMP格式的数字,输出则为车牌号码的数字。
车牌自动识别是一项利用车辆的动态视频或静态图像进行车牌号码、车牌颜色自动识别的模式识别技术。
其硬件基础一般包括触发设备、摄像设备、照明设备、图像采集设备、识别车牌号码的处理机等,其软件核心包括车牌定位算法、车牌字符分割算法和光学字符识别算法等。
某些车牌识别系统还具有通过视频图像判断车辆驶入视野的功能称之为视频车辆检测。
一个完整的车牌识别系统应包括车辆检测、图像采集、车牌识别等几部分。
当车辆检测部分检测到车辆到达时触发图像采集单元,采集当前的视频图像。
车牌识别单元对图像进行处理,定位出车牌位置,再将车牌中的字符分割出来进行识别,然后组成车牌号码输出。
二、设计步骤总体步骤为:基本的步骤:a.车牌定位,定位图片中的车牌位置;b.车牌字符分割,把车牌中的字符分割出来;c.车牌字符识别,把分割好的字符进行识别,最终组成车牌号码。
车牌识别过程中,车牌颜色的识别依据算法不同,可能在上述不同步骤实现,通常与车牌识别互相配合、互相验证。
(1)车牌定位:自然环境下,汽车图像背景复杂、光照不均匀,如何在自然背景中准确地确定车牌区域是整个识别过程的关键。
首先对采集到的视频图像进行大范围相关搜索,找到符合汽车车牌特征的若干区域作为候选区,然后对这些侯选区域做进一步分析、评判,最后选定一个最佳的区域作为车牌区域,并将其从图象中分割出来。
车牌识别的matlab程序-(详细注释,并有使用注意点)
附录车牌识别程序clear ;close all;%Step1 获取图像装入待处理彩色图像并显示原始图像Scolor = imread('3.jpg');%imread函数读取图像文件%将彩色图像转换为黑白并显示Sgray = rgb2gray(Scolor);%rgb2gray转换成灰度图figure,imshow(Scolor),title('原始彩色图像');%figure命令同时显示两幅图figure,imshow(Sgray),title('原始黑白图像');%Step2 图像预处理对Sgray 原始黑白图像进行开操作得到图像背景s=strel('disk',13);%strel函数Bgray=imopen(Sgray,s);%打开sgray s图像figure,imshow(Bgray);title('背景图像');%输出背景图像%用原始图像与背景图像作减法,增强图像Egray=imsubtract(Sgray,Bgray);%两幅图相减figure,imshow(Egray);title('增强黑白图像');%输出黑白图像%Step3 取得最佳阈值,将图像二值化fmax1=double(max(max(Egray)));%egray的最大值并输出双精度型fmin1=double(min(min(Egray)));%egray的最小值并输出双精度型level=(fmax1-(fmax1-fmin1)/3)/255;%获得最佳阈值bw22=im2bw(Egray,level);%转换图像为二进制图像bw2=double(bw22);%Step4 对得到二值图像作开闭操作进行滤波figure,imshow(bw2);title('图像二值化');%得到二值图像grd=edge(bw2,'canny')%用canny算子识别强度图像中的边界figure,imshow(grd);title('图像边缘提取');%输出图像边缘bg1=imclose(grd,strel('rectangle',[5,19]));%取矩形框的闭运算figure,imshow(bg1);title('图像闭运算[5,19]');%输出闭运算的图像bg3=imopen(bg1,strel('rectangle',[5,19]));%取矩形框的开运算figure,imshow(bg3);title('图像开运算[5,19]');%输出开运算的图像bg2=imopen(bg3,strel('rectangle',[19,1]));%取矩形框的开运算figure,imshow(bg2);title('图像开运算[19,1]');%输出开运算的图像%Step5 对二值图像进行区域提取,并计算区域特征参数。
基于MATLAB图像处理的汽车牌照识别系统
基于MATLAB 图像处理的汽车牌照识别系统仇成群(盐城师范学院,江苏盐城224002)汽车牌照识别系统是建设智能交通系统不可或缺的部分。
基于MATLAB 图像处理的汽车牌照识别系统是通过引入数字摄像技术和计算机信息管理技术,采用先进的图像处理、模式识别和人工智能技术,通过对图像的采集和处理,获得更多的信息,从而达到更高的智能化管理程度。
车牌识别系统整个处理过程分为预处理、边缘提取、车牌定位、字符分割、字符识别五大模块,用MATLAB 软件编程来实现每一个部分处理工程,最后识别出汽车牌照[1-4]。
1MATLAB 及其图像处理工具概述MATLAB 是MATrix LABoratory (矩阵实验室)的缩写,是Math Works 公司开发的一种功能强、效率高、简单易学的数学软件。
MATLAB 的图像处理工具箱,功能十分强大,支持的图像文件格式丰富,如*.BMP 、*.JPG 、*.JPEG 、*.GIF 、*.TIF 、*.TIFF 、*.PNG 、*.PCX 、*.XWD 、*.HDF 、*.ICO 、*.CUR 等。
MATLAB 7.1提供了20多类图像处理函数,几乎涵盖了图像处理的所有技术方法,是学习和研究图像处理的人员难得的宝贵资料和加工工具箱。
这些函数按其功能可分为:图像显示、图像文件I/O 、图像算术运算、几何变换、图像登记、像素值与统计、图像分析、图像增强、线性滤波、线性二元滤波设计、图像去模糊、图像变换、邻域与块处理、灰度与二值图像的形态学运算、基于边缘的处理、色彩映射表操作、色彩空间变换、图像类型与类型转换。
MATLAB 还着重在图形用户界面(GUI )的制作上作了很大的改善,对这方面有特殊要求的用户也可以得到满足。
本文将给出MATLAB 的图像处理工具箱中的图像处理函数实现图像处理与分析的应用技术实例。
2基于MATLAB 图像处理的汽车牌照识别系统2.1系统组成基于MATLAB 图像处理的汽车牌照识别系统主要包括车牌定位、字符车牌分割和车牌字符识别三个关键环节。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
毕业设计(论文)题目:汽车牌照定位系统设计与开发诚信承诺书本人郑重声明:所呈交的毕业设计(论文)汽车牌照定位系统设计与开发是本人在导师的指导下独立进行研究所取得的成果,其内容除了在毕业设计(论文)中特别加以标注引用,表示致谢的内容外,本毕业设计(论文)不包含任何其他个人、集体已发表或撰写的成果作品。
班级:计科94学号:0921144作者姓名:2013 年5 月25 日无锡太湖学院信机系计算机科学与技术专业毕业设计论文任务书一、题目及专题:1、题目汽车牌照定位系统设计与开发2、专题二、课题来源及选题依据课题来源:导师指定选题依据:汽车车牌识别系统是近几年发展起来的计算机视觉和模式识别技术在智能交通领域应用的重要研究课题之一。
在车牌自动识别系统中,首先要将车牌从所获取的图像中分割出来实现车牌定位。
这是进行车牌字符识别的重要步骤,定位的准确与否直接影响车牌识别率。
车辆牌照定位与识别是计算机视觉与模式识别技术在智能交通领域应用的重要研究课题之一,该技术应用范围非常广泛,其中包括:(1)交通流量检测;(2)交通控制与诱导;(3)机场、港口等出入口车辆管理;(4)小区车辆管理;(5)闯红灯等违章车辆监控;(6)不停车自动收费;(7)道口检查站车辆监控;(8)公共停车场安全防盗管理;(9)计算出行时间等。
其潜在在市场应用价值极大,有能力产生巨大的社会效益和经济效益。
三、本设计(论文或其他)应达到的要求:软件、技术要求:在基于图像处理的车牌识别技术的基础上设计并开发了一个基于MATLAB的车牌定位系统通过编写MATLAB文件对各种车辆图像处理方法进行分析、比较,最终确定了车牌预处理、车牌粗定位和精定位的方法。
四、接受任务学生:计科94 班姓名宋开拓五、开始及完成日期:自2012 年11 月12 日至2013年5月25日六、设计(论文)指导(或顾问):指导教师签名签名签名教研室主任〔学科组组长〕签名研究所所长系主任签名2012年11月12日车辆牌照识别系统(vehicle license plate recognition system,简称LPR)是现代智能交通系统中的一项重要研究课题,是实现智能交通的重要环节,涉及领域异常广阔。
智能交通系统可以在不影响汽车正常行驶的状态下自动完成对牌照的有效识别,很显然这一技术的发明对于交通管理工作起到了很大的推动作用。
目前,车辆牌照识别技术已经广泛应用于高速公路的监测,电子收费,交通违规管理,安全停车管理,偷盗车辆辨别等重要领域。
由于牌照拍摄场景的复杂性以及车牌位置和图像质量的不可预知性,车牌定位系统一直都未做到令人满意,所以车牌定位一直是这个领域研究的热点。
因此对于汽车牌照识别技术的研究具有重要的现实意义。
车牌识别技术主要包括车牌定位和车牌识别两部分,而车牌定位是该系统的关键之一。
本文针对车牌识别系统中关于静态图片中的车牌定位问题。
在车牌定位系统中,在MATLAB开发平台上,我们分别对图像预处理、图像的边缘检测和分割的若干方法进行编程实验,通过对静态图片进行灰度变换,二值化,中值滤波等一系列处理,提出了基于垂直边缘检测算子的车牌定位方法,根据汽车牌照区域的垂直边缘统计特性,从图像中确定可能存在的牌照候选区,在利用车牌几何形状的特点对这些候选区进行筛选,得到车牌位置,为进一步的字符识别打下基础。
关键词:车牌定位;图像处理;边缘检测;MATLABIIIThe vehicle license plate recognition system (vehicle license plate recognition system, referred to as LPR) is an important research subject in modern intelligent transportation system, is an important part of realizing intelligent transportation, relates to the very broad filed. Intelligent transportation systems can auto-complete state does not affect the normal driving license identification, it is clear that the invention of this technology for traffic management has played a significant role in promoting. At present, the vehicle license plate recognition technology has been widely used in highway monitoring, electronic toll collection, traffic violation management, security, parking management, vehicle theft to identify important areas such as. License shooting scene complexity as well as the license plate location and image quality of the unpredictability of the, license plate positioning system, none has been done satisfactorily, so license plate location has been a hot research of this area. Therefore, the vehicle license plate recognition technology has important practical significance.License plate recognition technology mainly includes two parts of the license plate location and license plate recognition, the license plate location is one of the keys of the system. In this paper, the license plate location for license plate recognition system on a static picture. License plate positioning system, in the MATLAB development platform, we use image preprocessing, image edge detection and segmentation method for programming experiment, by gray-scale transformation of the still pictures, the two values, median filtering and a series of processing,put forward license plate location method based on vertical edge detection operator,according to the vertical edges of the statistical characteristics of the vehicle license area,identify possible license candidate from the image,on the use of license plate geometry characteristics of these candidate screening,license plate location, and lay the foundation for further character recognition.Keywords:License plate location; image processing; edge detection; MATLAB目录摘要........................................................................................................................................... I II ABSTRACT .................................................................................................................................. I V 目录.. (V)1 绪论 (1)1.1本课题的研究背景和意义 (1)1.2国内外的发展概况 (1)1.3本课题主要研究的内容 (2)1.4我国车牌的特点 (2)1.5设计的总体思想 (3)1.6本文各章节内容安排 (3)1.7开发工具及运行环境 (3)2 基础知识和技术介绍 (5)2.1基础知识 (5)2.2MATLAB简介 (6)3 车牌定位详细设计 (11)3.1图像预处理 (12)3.1.1 车牌的基本特征 (12)3.1.2 彩色图像的灰度化 (12)3.1.3 图像灰度变换 (17)3.1.4 线性变换 (17)3.1.5 分段线性灰度变换 (18)3.1.6 非线性灰度变换 (19)3.1.7 图像平滑 (19)3.2平滑处理 (19)3.2.1 噪声的基本概念 (19)3.2.2 空间域平滑 (20)3.2.3 频率域平滑 (22)3.3图像边缘检测 (22)3.3.1 引言 (22)3.3.2 梯度算子 (22)3.3.3 Roberts算子 (23)3.3.4 Prewitt算子 (23)3.3.5 Sobel算子 (24)3.3.6 Canny算子 (25)3.3.7 Laplacian算子 (26)3.4牌照的定位与分割 (27)3.4.2 牌照区域的分割 (32)3.4.3 车牌图像二值化 (32)3.4.4 中值滤波 (34)3.4.5 字符的分割与归一化 (36)3.5本章小结 (37)4 车牌定位系统实现与测试 (39)4.1系统构成 (39)4.2实验结果及分析 (39)4.3本程序对其他图片的识别效果 (44)4.4本章小结 (50)5 结论与展望 (51)5.1结论 (51)5.2研究工作的展望 (51)致谢 (53)参考文献 (54)汽车牌照定位系统设计与开发1 绪论1.1 本课题的研究背景和意义20世纪90年代以来,随着我国经济的快速发展,人民生活水平的不断提高,国内高速公路、城市道路、停车场建设越来越多,汽车数量急剧增加。