A1-09-自适应重磁对应分析
稀土元素以及C N对铁钴基合金软磁材料微观结构和磁性能的影响
稀土元素以及C N对铁钴基合金软磁材料微观结构和磁性能的影响摘要Fe、Co基有序合金常用于自旋阀和磁性隧道结等自旋电子元器件的铁磁电极材料,如何有效调控其铁磁电极材料的自旋极化电子结构,是开发新一代超高密度信息存储材料的重要课题之一。
本文基于密度泛函理论的第一性原理,首先研究了BCC Fe、Co的自旋极化电子结构,进而计算了Fe3Co(DO3结构),FeCo(B2结构),及FeCo3(DO3结构)有序合金的自旋极化电子结构。
计算结果表明,Fe3Co、FeCo及FeCo3的磁矩分别为μ = 9.31 μB、4.47 μB和8.01 μB; 费米面处的自旋极化率分别为P = 9.5%、78.1%和80.1%。
自旋极化率随着Co含量的增加而增大。
对合金晶体结构进行第一性原理计算是研究其性质的一种非常重要的方法,将对分析研究上述结构和性质的变化起到一定的理论指导作用。
本文通过文献调查铁钴合金的电子结构和原子磁矩,然后用添加稀土元素,采用非自耗真空电弧炉冶炼Fe50Co50-x RE x( RE = La、Ce、Gd、Dy) 合金锭。
通过MS软件等测试分析手段对添加稀土元素对FeCo合金的微观组织和磁性能影响做了系统研究。
结果表明,稀土元素的添加会在周围形成富稀土相,当含量较高时还会出现过渡相。
添加稀土是FeCo合金的磁导率增大。
关键词:自旋电子学;FeCo有序合金;磁性分析;微观组织第一章绪论1.1磁学发展概述磁学(magnetism),又称为铁磁学(ferromagnetism),是现代物理学的一个重要分支。
现代磁学是研究磁,磁场,磁材料,磁效应,磁现象及其实际应用的一门学科。
磁学和电学有着直接的联系。
经典磁学认为如同电荷一样,自然界中存在着独立的磁荷。
相同的磁荷互相排斥,不同的磁荷互相吸引。
而现代磁学则认为环形电流元是磁极产生的根本原因,相同的磁极互相排斥,不同的磁极互相吸引。
独立的磁荷是不存在的。
浅谈选煤用磁铁矿粉衰减度问题
产业科技创新 Industrial Technology Innovation36Vol.2 No.25浅谈选煤用磁铁矿粉衰减度问题邬 奎(国家能源集团神东煤炭集团洗选中心工艺煤质部,陕西 榆林 719315)摘要:衰减度,是评价选煤用磁铁矿粉是否具有可回收利用价值的重要指标,可以对计算介耗和补介进行有效的指导,实现选煤进度的提升。
文章重点针对选煤用磁铁矿粉衰减度问题进行了详细的分析,希望可以在优化选煤工艺参数方面发挥一定的作用,供业内人士参考。
关键词:磁铁矿粉;衰减度;重介质中图分类号:TF046.4 文献标识码:A 文章编号:2096-6164(2020)25-0036-02重介质选煤技术的提升扩大了重介质选煤在我国的发展规模。
在重介质选煤技术的应用过程中,磁铁矿粉是一种有着较高回收再利用价值的介质,在重介选煤厂的日常生产经营有着广泛的应用。
磁铁矿粉在重介选煤厂的消耗量,对于选煤厂的技术经济指标有着决定性影响。
加强选煤用磁铁矿粉衰减度问题的分析,进而采取针对性的降低介质消耗的措施,在促进我国重介质选煤技术发展方面有着积极的作用。
1 选煤用磁铁矿粉衰减度的相关概述分析选煤用磁铁矿粉的性质,发现其存在着一定的磁滞性。
当其离开磁化场之后,依然会留有部分剩磁。
而磁铁矿粉的磁性与矿石的形状以及粒度有着直接的联系。
影响选煤用磁铁矿粉回收的因素,是磁铁矿粉在磁场中受到的脱离力,指的是磁力、重力、离心力、惯性力和流体阻力的合力。
如果磁铁矿粉颗粒的磁性较强,那么其所受的磁力就会小于其所受的脱离力。
而当磁铁矿粉被回收利用之后,其颗粒形状和剩磁就会有所改变,同时其在磁场中受到的磁力、脱离力较之以前也会有明显的变化。
业内人士在研究磁性物含量与矿物磁性变化之间存在的规律的过程中,提出了“中间磁性物相对含量”的概念,指的是总磁物性中中间磁性物所占的比例。
将其作为磁铁矿的选矿依据,具有较高的可行性,但是其在评价选煤用磁铁矿粉的回收再利用性时,却出现了很多问题。
基于马氏体重定向的铁磁形状记忆合金本构理论分析
o
“ 搠
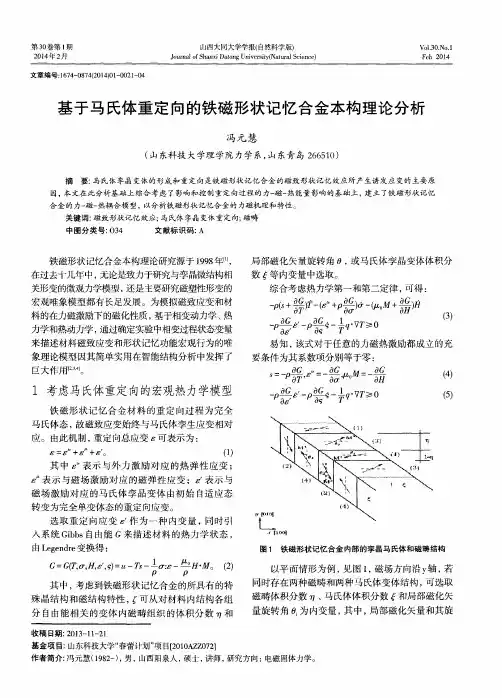
图1 铁磁形状记忆合金 内部的孪晶马 氏体和磁畴结构
其 中, 考虑到铁磁形状记忆合金 的所具有的特 殊晶结构和磁结构特性 , 可从对材料内结构各组 分 自由能相关 的变体 内磁畴组织 的体积分数 田和
盯
G
+G 。 ( 7 1 ) = 一 嘛 一 l 删 ( 7 1 一T) +
。
( ( 1 一 ) ( 一 M。 ) [ 日一 Ⅳ[ ( 1 一r / ) M, 一r i M。 ] + ( 一 M: ) 【 H一 Ⅳ【 ( 1 一 i r ) M 一r i M ] } 一
耵 =- p = : △ s . + : △ 一T o ) +
{ 。 [ M ・ ( H 一  ̄ ’ N M 一 2 ) 一 M ・ ( H 一 1 N M  ̄ - ) ] +
一
G 卜
其中每种马氏体变体的 自由能表示为:
G ( T , o r , H , 7 7 , =G ( T , o r , H) + G ( 胃 , , +
局 部 磁 化 矢 量 旋 转 角 0, 或 马 氏体 晶变体 体 积分
数 等内变量中选取。 综 合 考虑热 力 学第一 和第 二定 律 , 可得 :
等 ) 一 + p O G J . 一 。 + 丽 O G  ̄ … O G s . p 誓 卜 V T  ̄ > 0
山西大同大学学报( 自然科学版)
转角可认作为常量 。
驱动 力 :
对于图示铁磁形状记忆合金材料共存结构 , 总 的G i b b s 自由能 可 由两 种 变 体 贡献 的加 权 平 均 ,以 及两 种 变体 相互作 用 引起 的混合 自由能 叠加得 到 :
《2024年铁磁-反铁磁体系中交换偏置的角度依赖关系及其阶跃现象》范文
《铁磁-反铁磁体系中交换偏置的角度依赖关系及其阶跃现象》篇一铁磁-反铁磁体系中交换偏置的角度依赖关系及其阶跃现象一、引言在磁学领域,铁磁(FM)和反铁磁(AFM)材料之间的相互作用一直是研究的热点。
其中,交换偏置现象是这两种材料相互作用的重要表现之一。
交换偏置是指铁磁材料在经过与反铁磁材料进行磁交换后,表现出非零的磁滞效应,这在诸如传感器、自旋电子学以及硬盘读写技术中都有重要的应用。
本篇论文旨在探究铁磁/反铁磁体系中交换偏置的角度依赖关系以及阶跃现象,进一步深化对该现象的理解和运用。
二、交换偏置的原理及角度依赖关系1. 原理交换偏置是由于铁磁和反铁磁材料之间交换耦合而产生的。
当两种材料相互接触时,由于反铁磁材料的自旋和磁矩对铁磁材料的自旋产生作用,导致铁磁材料的磁化方向偏离其原始方向,从而产生非零的偏置场。
2. 角度依赖关系交换偏置的角度依赖关系主要表现在磁场方向与材料表面法线之间的夹角对偏置场的影响。
不同的角度会引发不同的耦合方式和交换力,从而导致交换偏层的强弱不同。
同时,在不同的温度下,角度依赖关系的趋势也可能有所不同。
为了进一步揭示这些变化,实验研究和理论计算都需要开展。
三、阶跃现象的分析阶跃现象是指在不同角度下,交换偏置表现出的一种突变的物理现象。
这一现象的发生可能与自旋波动、界面的原子结构、自旋转换等多种因素有关。
此外,这一现象与磁场的大小和方向以及温度都有关系。
为了研究这一现象,我们可以通过改变磁场方向和大小,以及改变温度等方式来观察其变化规律。
四、实验研究及结果分析我们通过实验研究了不同角度下交换偏置的变化情况。
实验中,我们采用了不同的铁磁/反铁磁材料组合,通过改变磁场的方向和大小来观察偏置场的变化。
我们发现,在特定的角度下,偏置场出现了明显的阶跃现象。
这一现象的发生与材料的类型、界面结构以及磁场的大小和方向都有关系。
通过分析实验数据,我们发现:在低磁场下,阶跃现象较为明显;而在高磁场下,这一现象则相对减弱。
初值自适应的磁性目标跟踪方法
初值自适应的磁性目标跟踪方法戴忠华; 周穗华; 张宏欣; 单珊【期刊名称】《《电子学报》》【年(卷),期】2019(047)012【总页数】8页(P2457-2464)【关键词】磁性目标跟踪; 磁偶极子; 多初值模型; 最大似然选择; 自适应跟踪算法【作者】戴忠华; 周穗华; 张宏欣; 单珊【作者单位】海军工程大学兵器工程学院湖北武汉430033; 解放军91439部队43分队辽宁大连116041【正文语种】中文【中图分类】TM1551 引言对于水面非合作目标的跟踪与定位[1,2],常常使用被动磁定位技术,利用磁测平台的测量数据,基于目标磁场的数学等效模型,采用相应的方法进行求解,以获取水面非合作目标的位置参数、磁矩参数、尺度参数等.目前,被动磁定位方法主要分为三类:第一类是基于静态等效模型的参数寻优方法[3,4];第二类是基于磁梯度张量直接推导反演方法[5~7];第三类是基于动态等效模型的滤波估值求解方法[8~13],由于滤波估值方法能够从带噪声的观测数据中实时的估计目标状态,因此得到了较为广泛的研究.滤波估值方法是基于磁性目标的等效数学模型进行的,而磁性目标的等效模型(单椭球体、磁偶极子、磁偶极子阵列或混合模型)是高维、强非线性的[14],因此采用滤波估值的磁性目标跟踪其实是高维、强非线性的滤波估值问题.对于高维、强非线性的滤波估值问题,采用粒子滤波虽然能够克服非线性,但高维情况下会出现“维数灾”问题,无法实现实时跟踪;相对于粒子滤波,高斯矩近似滤波在初始状态偏差较小时,能够实时进行磁性目标的跟踪.然而,对于水面非合作目标的跟踪,由于初始状态的不确定性,在大初始误差条件下,基于高斯矩近似滤波的磁性目标跟踪方法会出现跟踪发散.所以,解决磁性目标滤波跟踪方法的关键在于如何获取精度较高的初始状态值,而求解初始状态值相当于求解磁性目标跟踪问题本身.为此,本文将针对初值不确定条件下滤波跟踪发散问题,基于磁偶极子模型,提出一种多初值模型解决框架;在选用平方根形式的中心差分卡尔曼滤波器(SRCDKF)的基础上,结合最大似然选择,得到了一种初值自适应磁性目标滤波跟踪方法.2 滤波跟踪多模型建立2.1 跟踪模型建立统计信号处理中,传感器量测模型为:yk=h(xk)+ek(1)其中,yk为传感器输出,xk为系统状态,ek为测量过程中的噪声.远距离的磁性目标可以看成点磁偶极子,则由磁偶极子磁场计算模型可知:(2)其中,r为目标相对于磁传感器的位置矢量,m为目标磁矩,μ0=4π×10-7H/m 为真空磁导率.由(1)、(2)可建立磁传感器的量测模型为:(3)水面非合作目标通常为一些低动态运动舰船、潜艇目标,此类目标在短时间内都在同一平面上匀速直线运动.因此,可建立传感器与磁性目标运动模型,假设磁性目标在某一高度平面,直线匀速经过传感器.匀速运动的目标运动模型可表示为:(4)其中,rk=(xk,yk)T为目标位置参数,vk=(vx,vy)T是目标运动速度Ts为采样时间.对于匀速直线运动,量测模型式(3)中的磁矩参数是常量,即:mk=mk-1=(mx,my,mz)T(5)根据运动模型和观测模型,可确定目标状态参数xk为:(6)建立状态转移方程,状态转移过程符合高斯-马尔科夫过程,用线性变换矩阵表示:xk=Axk-1+Wk(7)其中Wk为转移噪声,转移矩阵A为:(8)联合式(3)和式(7)建立了磁性目标跟踪模型.2.2 静态多模型方法静态多模型方法的主要思想是将多个模型的滤波结果通过模型的后验概率加权融合,融合的结果作为系统的滤波估计输出.假设真实系统模型不发生变化,系统的真实模型从N个候选模型中选取,代表j 个模型,真实模型为其中一个,模型Mj的先验概率为满足根据贝叶斯原理,若给定观测序列y1:k,则Mj作为系统真实模型的后验概率为:(9)式中,p(yk|Mj,y1:k-1)为模型Mj的似然函数,Pr(Mj|y1:k-1)为上一时刻的后验模型概率,则式(9)可改写为:(10)即得到模型概率更新递推公式.记由高斯假设可得:(11)式中,为滤波器的残差,为滤波器的协方差.由式(10)可知,模型的Mj的后验概率可由上一时刻的后验概率及各个模型对应滤波器的似然函数得到.由于各模型的对应的滤波估值服从高斯分布,利用后验概率加权融合各个模型的估值结果,即可得多模型估值结果:(12)对式(12)取均值和方差可得:(13)(14)即为多模型滤波的估计值和协方差.2.3 初值多模型建立假设目标的真实初始状态在空间中是均匀分布的,现有多个初始状态,真实的系统状态为其中一个,即:(15)式中x0为系统真实的初始状态,为N个假设初始状态中的第j个,对应的第j个初始状态的均值为协方差为因此,N个初始状态结合滤波器,可以看作N个模型,即可利用静态多模型方法进行滤波估值.这里的多个初始状态在于不同的初始位置参数r0=(x0,y0)T.对于初始位置参数r0的确定,可以根据磁性目标磁场的分布特征获得粗略的多个初始值.对式(2)进行化简,求磁场模值为:(16)则可得标量模值:(17)利用磁传感器测量的三轴矢量值以及磁矩模,可根据式(17)可大概得到磁性目标与磁传感器的距离‖r‖2为:(18)式(18)中,‖m‖2为磁矩参数模,该值的大小与磁性目标的尺寸有关.因此,多个滤波初始位置参数r0,可根据式(18)利用初始测量磁场强度‖h(r0)‖2和磁矩模‖m‖2计算获得.式(18)中磁矩参数‖m‖2的大小与目标本身磁源强度相关,对于磁性舰船,‖m‖2可根据大小舰船的磁矩典型值确定.经过统计舰船的最大磁矩模‖m‖2max,最小磁矩模为‖m‖2min,则可将‖m‖2K设为‖m‖2max的2至3倍,‖m‖21设为‖m‖2min.在‖m‖2K与‖m‖2min进行等比分配,即:(19)假设确定K个磁矩模,则可利用式(18)可得可能的K个初始距离:(20)式(20)得到磁性目标相对于磁传感器的距离,现假设磁性目标可在磁传感器l个方位上,则由距离与方位得到位置初始参数值,总共可获得K×l个初始位置参数,由初始位置参数可得K×l个滤波初始状态值.如图1所示,当磁矩模数K设置为3时,则根据式(18)可得三个距离数,若在每个距离上等方位间隔选取方位数l=4,那么将形成12个初值,由初值和滤波单元构成12个滤波器.那么每个初值模型的参数,即初始状态可设置为:(21)式中,为按上述方式选取的初始距离;φl为假设的方位所对应的角度;为初始速度参数,每个滤波器选择同样的初始速度值,其值可根据典型的舰船速度得到;为磁矩参数,由于不同舰船目标磁化情况的不同,因此在设定各磁矩分量时,可将滤波器的所有的初始磁矩参数值都设为0.3 基于SRCDKF的自适应跟踪算法3.1 基于最大似然选择的多模型选择方法2.2小节利用模型后验概率加权融合和的方式得到多模型滤波估值结果,由于本文建立的多初值模型数量较多,如图1所示,建立了12个模型.当模型数太多时,利用加权融合的方式会增加算法的复杂程度,使整体的滤波性能以及效率降低.在众多初值模型中,真实的系统初值只有一个,从最大似然意义来说,该最优的目标初始状态仅有一个,因此,对于多模型的选择,本文采用最大似然选择算法.首先假设目标的多初值模型是均匀分布的,即每个初值模型具有相同的先验概率,此时k时刻初值后验概率权值等于归一化的似然函数值,根据式(10)给出的递推公式可得:(22)根据式(22)可知,由于各模型先验概率是相等的,则可将它重写为:(23)在k时刻时,对似然值的归一化并不会改变分子项的相对大小,因此,可直接利用似然函数进行判别,根据最大似然选择算法,对似然函数式(11)取对数得:(24)可得对数似然函数为:(25)对各模型中的最大似然值进行归一化,即:(26)选取所对应的初值模型滤波估值结果作为系统的滤波估值输出,该输出结果应为最准确初值滤波器的滤波结果.下面将选取合适的滤波器作为滤波跟踪单元,得到相应的磁性目标自适应跟踪算法.3.2 SRCDKF滤波单元自适应跟踪算法考虑到观测方程是高度非线性的,EKF(Extened Kalman Filter)需要求解雅可比矩阵,而UKF(Unscented Kalman Filter)和CDKF(Central Difference Kalman Filter)在计算过程中需要对协方差进行开方运算,算法不太稳定,因此,选用SRCDKF,该算法采用协方差的平方根代替协方差参加递推运算,过程中利用QR 分解,cholesky因子更新等高速算法更新状态协方差矩阵的平方根,提高了SRCDKF的运算速率和算法的稳定性.基于SRCDKF滤波单元,结合第2.3节和第3.1小节可得磁性目标SRCDKF自适应跟踪算法,如下所示.4 自适应跟踪算法仿真试验与分析本文所提出的自适应跟踪算法关键在于多初值模型建立和多初值模型选择两部分,多初值模型建立是根据磁偶极子模型函数化简而来,多初值模型选择是利用最大似然选择进行.因此,自适应跟踪算法能否收敛需要考虑最大似然选择能否有效从多个初值中选择初值偏差最小的结果输出,同时,也需考虑初值偏差最小的一个初值能否满足SRCDKF跟踪收敛的要求(即多个初值中必须包含与真实初值偏差较小的一个,且该初值偏差必须满足SRCDKF跟踪收敛的要求).接下来将通过仿真试验对多初值模型建立有效性和最大似然选择有效性进行验证.4.1 多初值模型建立有效性验证对于多初值模型建立有效性验证,首先需要知道SRCDKF跟踪收敛最大的初值偏差,然后考察多初值设置方法得到的多个初值中是否包含偏差小于最大偏差的初值. 表1 跟踪真实初始参数参数/单位值r0/m[-140 -100]Τv0/(m/s)[66]Τm0/(A·m2)[8 2 4]Τ×107Ts/s0.1N300为了获取SRCDKF收敛的最大初值偏差,分别设置不同偏差大小的初值进行跟踪.跟踪场景如图2所示,磁传感器位于坐标原点,目标在高位20m的平面上直线运动,其初始参数如表1所示,表中r0,v0,m0分别为目标的真实初始位置、速度、磁矩,Ts为磁传感器的采样时间间隔,N为采样点数,观测噪声强度σr=8,方程为R=σrI3×3,由这些参数生成观测数据,根据这些观测数据,利用SRCDKF滤波器在不同初值设置下进行跟踪,这些初值具有不同的偏差,初值偏差可由下式计算:(27)其中,(x0,y0)T为真实位置初始位置,(x,y)T设置的初始位置.现设置Δr={10,30,50,100,200},(x,y)T的取值在以(x0,y0)T为圆心、半径为Δr的圆上,方向随机选取,分别进行200次随机角度取值的跟踪.为量化算法跟踪效果,计算各时刻的均方根误差(Root Mean Square Error,RMSE)RMSE(r):(28)其中,为第n次试验在k时刻的真实位置,为第n次试验在k时刻的滤波估计值.在进行SRCDKF滤波时,设置状态转移过程的噪声强度为σq=0.1,噪声方差Q=σqI7×7,得到不同初值偏差下跟踪估计结果,计算随时间变化的均方根误差如图3所示.从图3可知,当初始位置偏差大于50m时,SRCDKF跟踪会出现发散,即SRCDKF跟踪收敛的初值偏差最大为50m.下面将分析利用2.3节的方法能否获得包含偏差小于50m的初值.由表1中的参数生成的测量数据,初始点位置为r0=(﹣140,-70,20)T,该点的测量值为‖h(r0)‖2,真实磁矩‖m0‖2=9.156×107A·m,设置等比磁矩模分别为‖m0‖K={0.1 1 10}×107 A·m,K=1,2,3,利用式(18)可以计算出大概的距离‖r0‖2K,结果如表2所示,表2中‖ r0‖2为真实距离,偏差一栏是指‖r0‖2K 与真实距离的偏差,该偏差是假设方位与真实方位一致时的初值偏差,从表中可以看出‖r0‖23偏差为17.9小于50m,说明当假设方位与真实方位一致时,按照上面的磁矩设置能够满足SRCDKF跟踪收敛的要求.表2 不同磁矩模量计算的距离大小距离‖r0‖2‖r0‖21‖r0‖22‖r0‖23大小/m157.837.781.2174.9偏差/m0120.176.617.1由于初始方位是未知的,可以假设多方位来生成初值,假设方位分别设置为π/3、2π/3、4π/3、5π/3时,根据上面的‖r0‖2K,K=1,2,3,可获得12个初值,其分布如图4所示,图中最小偏差圆的半径为50m,从图中可知,在最小偏差圆内有一个初值,说明该初值与真实初值的偏差小于50m,即2.3节中的多初值模型建立方法能够生成满足SRCDKF跟踪收敛的初值模型.从上面的分析可知:(1)SRCDKF跟踪收敛的初值最大偏差为50m;(2)在表1中的跟踪场景中,按照2.3节的初值模型建立方法是有效的.然而,磁矩模量设置和方位设置需要根据具体应用环境而定,但是可以确定的是,只要磁矩模量等比划分越细,方位设置越多,2.3节的多初值模型建立方法是有效的.4.2 最大似然选择算法的有效性验证下面将对多初值模型选择算法的有效性进行验证,考察最大似然选择能否输出最佳结果.根据4.1节中的跟踪场景设置及初值条件,进行200次Monte-Carlo运算,根据每个初值条件下的滤波结果,计算其总均方根误差(Total Root Mean SquareError,TRMSE):(29)总均方差计算结果如图5所示,图6给出了对应初值条件下200次Monte-Carlo 实验的平均对数似然函数值.分析图6和图7可知,当对数似然函数值最大时对应的模型所得滤波总均方误差最小,如图6和图7中的11号滤波器,这说明使用最大似然法选择可以从众多初值多模型中选择最佳的跟踪结果作为输出.最大似然函数选择的是跟踪结果最好的,而跟踪结果最好的输出应该是初值设置与真实初值最接近的滤波模型.图7给出了对数似然函数最大的前三个初值模型跟踪结果,图7中的#1~#3滤波器对应的是图6和图7中的11、12和7号滤波器,滤波器#1是对数似然函数值最大(11号滤波器)对应的初值模型,从图7可知,滤波器#1的初值与真实初始状态最接近,该初值模型可以收敛到真实轨迹,进一步验证了最大似然选择的正确性.表3 跟踪平均误差滤波序号x/my/mr/m#12.942.934.65#233.2535.9570.68#350.4932.3990.60表2给出对数似然函数最大的前三个初值模型跟踪结果的时间平均均方根误差(Mean Root Mean Square Error,MRMSE),包括位置参数平均均方根误差MRMSE(x)、MRMSE(y)和位置平均均方根误差MRMSE(r),位置参数均方根误差计算公式为:(32)(33)MRMSE(r)=(34)从表2中可以看出本方法的跟踪误差MRMSE(x)和MRMSE(y)不大于3m,MRMSE(r)不大于5m,验证了本文提出的自适应跟踪算法具有较高的跟踪精度,能够有效对磁性目标进行跟踪.4.3 跟踪算法对比分析4.1和4.2节就多初值设置和多初值选择的有效性进行验证,本文提出的自适应跟踪算法是解决初值先验未知下的一种解决框架,也可选用其他非线性滤波器作为基础滤波器,下面将对比UKF、CDKF、SRCDKF和CKF作为基础滤波器的跟踪效果.仿真参数设置与5.1节一样,分别进行200次Monte-Carlo仿真,得到跟踪结果如图8和图9所示,图8为轨迹跟踪效果,图9为各时刻的位置均方根误差,从图8和图9可知,将这几种滤波器作为基础的自适应滤波跟踪算法都能收敛,并且具有较好的跟踪精度.5 总结本文就如何解决初值偏差过大而导致磁性目标滤波跟踪失效的问题进行研究,提出多初值模型的解决框架,并以SRCDKF为滤波单元得到了的SRCDKF自适应跟踪算法.重点研究了如何建立多初值模型和如何从多模型中选取最佳结果.仿真试验结果表明,本文多初值模型建立方法和多模型选择方法的有效性,以不同滤波器单元的对比跟踪分析试验结果表明,在初始条件缺失的情况下,本文提出的解决框架都能够完成对磁性目标的跟踪.需要指出的是,文章是将磁性目标等效为磁偶极子,该等效在磁性目标较远的情况下(距离大于2.5倍目标尺度)是能够适用的,在近距离时,目标模型将不再适用,因此,接下来的工作是针对模型可调情况下的磁性目标跟踪方法进行研究.参考文献【相关文献】[1] 林春生.水雷引信系统设计原理[M].武汉:海军工程大学,2003.[2] 王金根,龚沈光.基于运动标量磁强计的磁性目标定位问题研究[J].电子学报,2002,30(7),1057-1060.WANG Jin-gen,GONG Shen-guang.Research on the problem of location magnetic target based on motion scalar magnetometer[J].Acta Electronica Sinica,2002,30(7):1057-1060.(in Chinese)[3] Nara T,Suzuki S,Ando S,et al.A closed-form formula for magnetic dipole localization by measurement of its magnetic field and spatial gradients[J].IEEE Transactions on Magnetic,2006,42(10):3291-3293.[4] Alimi R,Weiss E,Ram-Cohen T,et al.A dedicated genetic algorithm for localization of moving magnetic objects.Sensors 2015,15(23):23788-23804.[5] Wynn W M,Frahm C P,Carroll R H,et al.Advanced superconductinggradiometer/magnetometer arrays and a novel signal processing technique[J].IEEE Transactions on Magnetics,1975,11(2):701-707.[6] Nara T,Suzuki S,Ando S,et al.A closed-form formula for magnetic dipole localization by measurement of its magnetic field and spatial gradients[J].IEEETransactions on Magnetics,2006,42(10):3291-3293.[7] 贾文抖,林春生,孙玉绘,等.基于单个磁梯度计的磁目标定位方法研究[J].兵工学报,2017,38(08):1572-1577.JIA Wen-dou,LIN Chun-sheng,SUN Yu-hui.Research on magnetic target location method based on a single magenetic gradiometer[J].Acta Armamentarii,2017,38(08):1572-1577.(in Chinese)[8] Birsan M.Unscented particle filter for tracking a magnetic dipole target[A].Karmenu V.Proceedings of OCEANS 2005 MTS/IEEE[C].Washington:IEEE,2005,2:1656-1659.[9] Birsan M.Recursive Bayesian method for magenetic dipole tracking with a tensor gradiometer[J].IEEE Transactions on Magenetics,2011,47(2):409-415.[10] Wahlström,Niklas.Target Tracking Using Maxwell’sEquations[D].Linkoping:Linkoping University,2010.[11] Wahlström N,Gustafsson F.Magnetometer modeling and validation for tracking metallic targets[J].IEEE Transactions on Signal Processing,2014,62(3):545-556.[12] 吴垣甫,孙跃.基于递推更新卡尔曼滤波的磁偶极子目标跟踪[J].北京航空航天大学学报,2017,43(09):1805-1812.WU Yuan-Fu,SUN Yue.Magnetic dipole target tracking based on recursive update Kalman filter[J].Journal of Beijing University of Aeronautics and Astronautics,2017,43(9):1805-1812.(in Chinese)[13] 姚振宁,刘大明,刘胜道,等.基于不敏粒子滤波的水中非合作磁性目标实时磁定位方法[J].物理学报,2014,63(22):313-318.YAO Zhen-ning,Liu Da-ming,Liu Sheng-dao,et al.A real-time magnetic localization method of underwater non-cooperative magnetic targets base on unscented particle filter[J].Acta Phys Sin,2014,63(22):313-318.[14] 戴忠华,周穗华,单珊.基于模拟退火算法的舰船磁场高精度建模方法[J].电子学报,2018,46(06):1524-1529.Dai Zhong-hua,ZHOU Sui-hua,SHAN Shan.High accuracy method for ship magntic field based on simulated annealing algorithm[J].Acta Electronica Sinica,2018,46(06):1524-1529.。
自适应重磁对应分析
自适应重磁对应分析
自适应重磁对应分析是一种用于研究多重磁性变量之间相互作用的统计方法。
本报告旨在讨论此方法的能力、原理以及如何使用它进行研究。
首先,自适应重磁对应分析的能力仅有模型参数和变量伸缩这两种,而且仅适用于具有因变量的数据集。
其次,它的主要原理是通过对变量的伸缩参数和模型参数进行调整以反映不同观测值之间的关系。
使用自适应重磁对应分析研究多重磁性变量之间的相互作用,需要写出一组表达式,至少包含因变量和3个或3个以上的自变量。
所涉及的变量彼此可以不相关,但它们的系统关系必须是确定的,才可以由自适应重磁对应分析来实现。
然后,使用数据就可以拟合该模型,并确定最佳参数,这些参数可用于表达多个变量之间的关系。
最后,使用自适应重磁对应分析所得出的参数可以帮助研究者了解不同变量之间存在的动态变化,从而探究多变量之间的相互作用,并进一步指导研究方向。
综上所述,自适应重磁对应分析是一种十分有效的统计工具,可以用于研究多个变量之间的关系及其相互作用的情况。
尽管它的能力有限,但它可以在研究多变量之间的相互作用时发挥重要作用。
基于分布参数磁路模型的永磁接触器吸力特性
基于分布参数磁路模型的永磁接触器吸力特性薛毓强;吴金龙【摘要】针对永磁体集总参数磁路模型求解永磁接触器吸力特性存在计算精度较低的问题,提出了根据永磁体内磁通密度分布情况,将永磁体沿磁化方向和垂直于磁化方向按整体磁通密度相对误差最小的分块方法,构建永磁体分布参数接触器等效磁路模型.对所研究的永磁接触器等效磁路进行求解,获得接触器静态吸力特性计算值,在此基础上进一步求出静态吸力特性曲线簇,结合静态线圈磁链曲线簇对永磁接触器的动态微分方程组进行求解,得到动态吸力特性.吸力计算值与实测值相比有较好的一致性,且静态和动态吸力值相对误差分别在8%和10%以内,表明了采用永磁体分布参数的接触器系统磁路模型求解吸力特性这一方法的正确性和有效性,为永磁接触器设计和优化分析提供了一种有效的手段.【期刊名称】《电工技术学报》【年(卷),期】2014(029)007【总页数】7页(P222-228)【关键词】永磁;接触器;分块;等效磁路;吸力特性【作者】薛毓强;吴金龙【作者单位】福州大学电气工程与自动化学院福州 350116;福州大学电气工程与自动化学院福州 350116【正文语种】中文【中图分类】TM572.61 引言永磁接触器是永磁式电磁机构中的一种,不仅能够实现传统接触器的全部功能,而且还具有高可靠、高节能、抗晃电以及无温升等优点,因此得到了越来越多的应用[1-3]。
在永磁接触器的设计过程中,需要对吸力特性以及永磁体工作状态反复计算[4,5]。
基于三维有限元磁场软件仿真的方法虽具有精度高的优点,但其建模过程复杂,模型修改不便且计算耗时长。
采用传统的永磁体集总参数模型构造系统磁路求解的方法虽然模型简单,求解速度快,参数易修改,但实际系统中永磁体磁场并不均匀[6],这就造成该方法计算精度较低,无法满足吸力特性求解中准确度的要求。
由于在进行可靠性设计时,需要对吸力特性进行上千次、乃至上万次的计算,因此尽管等效磁路法计算精度低于仿真软件求解的方法,但仍然是可靠性设计的有效方法,故不少学者对此进行了研究。
紧凑型磁质子反冲谱仪磁分析系统的能量刻度
紧凑型磁质子反冲谱仪磁分析系统的能量刻度祁建敏;周林;蒋世伦;彭太平【摘要】介绍了一种用于多种特定环境下脉冲氘氚聚变中子能谱测量的紧凑型磁质子反冲谱仪的磁分析系统.通过三维粒子输运和蒙特卡罗模拟对磁分析系统性能进行了分析,使用CR-39径迹探测器和多个能量α单能粒子对系统进行了能量刻度.结果表明,磁分析系统具有良好的能量离散与聚焦性能,对给定能量范围的反冲质子,能够以1.5%~2.1%的能量分辨率实现(0.5~1.4)×10-4的探测效率.%A magnetic analysis system for a compact magnetic proton recoil spectrometer dedicated to pulse DT neutron spectroscopy in special experimental environments was presented. Performance of the system was analyzed using 3-D particle transport calculation and Monte-Carlo simulation. Energy calibration of the system was obtained using CR-39 track detector and mono-energetic a particles. The results indicate that the magnetic analysis system has achieved satisfactory performance on energy dispersion and focusing. It can achieve a detection efficiency of approximately (0. 5-1. 4) × 10-4 with an energy resolution from 1. 5% to 2.1% (for 7 MeV protons) in a given energy range of recoil protons.【期刊名称】《原子能科学技术》【年(卷),期】2011(045)007【总页数】4页(P880-883)【关键词】聚变中子;磁质子反冲;能量刻度;CR-39【作者】祁建敏;周林;蒋世伦;彭太平【作者单位】清华大学工程物理系,北京 100084;中国工程物理研究院核物理与化学研究所,四川绵阳621900;中国工程物理研究院核物理与化学研究所,四川绵阳621900;中国工程物理研究院核物理与化学研究所,四川绵阳621900;中国工程物理研究院核物理与化学研究所,四川绵阳621900【正文语种】中文【中图分类】O536聚变反应产生的中子能谱携带等离子体中心区域的重要信息,如离子温度和聚变功率等[1-3]。
层状磁电复合材料的磁电转换分析
3SP1 =SE11 TP1 +dP31 E3
(1)
D3=dP31 TP1 +εT33 E3
式 中 ,D3、E3 分 别 为 沿 厚 度 方 向 的 电 位 移 和 电 场 强 度 ,SP1 、TP1
分别为压电材料的应变和应力 ,T 为应力, 上 标 P 表 示 压 电
层。 由于压电陶瓷存在压电效应,压电材料在不同电学条件
0
(4)
将 式 (3)代 入 式 (4)积 分 ,且
SP1
=
坠u 坠z
,u 为 磁 电 材 料 的 纵
向 (z
向
)位
移
;E3=
V dP
,积分得
Q= lwε3′3 dP
V+
wdP31 jωSE11
(u2-u1)
(5)
式中,dP 为压电陶瓷层的厚度,u1=jωu(0)和 u2=jωu(l)分别 为 磁
电层在 z=0 和 z=l 处的速度。 由于是简谐激励,电流为
层状磁电复合材料的磁电转换分析
王杰敏,杨 虹
重庆邮电大学光电工程学院,重庆 400065
摘要 提出层状磁电复合材料 L-T 模型,从压电效应和压磁效应本构方程出发,采用等效电路法对复合材料的磁电电压系数进行
理论分析,并对材料磁电响应进行了数值计算,得出磁电响应仿真结果,所推导的磁电电压系数公式与等效电路模型公式得出的计
永磁同步电机复合编码器参考信号自适应标定方法
永磁同步电机复合编码器参考信号自适应标定方法王要强;马小勇;曹冲;彭金柱【摘要】In order to improve the accuracy of rotor position detection for permanent magnet synchronous motor (PMSM) and guarantee reliable operation of PMSM control system, an adaptive calibration method of reference signal for PMSM hybrid encoder was proposed. Based on analyzing the absolute and incremental modes of PMSM rotor position hybrid detection, the reference signal of encoder was pre-calibrated and error analysis was conducted. Then, combined with the characteristics of current vector angle in PMSM vector control strategy, the pre-calibration results of reference signal were adaptively optimized by the combination of fixed-step and variable-step adjustment methods. Simulation and experimental results show that the reference signal of encoder can be calibrated exactly and quickly, and the rotor position is acquired accurately through the proposed method. Besides, the proposed method is suitable for PMSM whether the motor is loaded or not.%为实现永磁同步电机(PMSM)转子位置的准确检测,保证PMSM控制系统的可靠运行,提出一种 PMSM 复合编码器参考信号的自适应标定方法.在分析 PMSM 转子位置复合检测中绝对式、增量式两种工作模式的基础上,首先对编码器参考信号进行预标定,并对预标定结果进行误差分析.然后结合PMSM矢量控制策略下电流矢量角的特点,采用定步长和变步长相结合的方式对预标定结果进行自适应优化.仿真及实验结果表明,提出的方法可以快速、精确地完成编码器参考信号的标定,从而准确地获取转子位置信息,并且同时适用于电机空载和带载情况.【期刊名称】《电工技术学报》【年(卷),期】2018(033)010【总页数】9页(P2383-2391)【关键词】永磁同步电机;转子位置;复合编码器;参考信号标定;电流矢量角【作者】王要强;马小勇;曹冲;彭金柱【作者单位】郑州大学电气工程学院郑州 450001;郑州大学电气工程学院郑州450001;郑州大学电气工程学院郑州 450001;郑州大学电气工程学院郑州450001【正文语种】中文【中图分类】TM351永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)具有功率密度高、调速性能好和易维护等优点,在工业领域得到了广泛的应用[1-3]。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自适应重磁对应分析范正国,刘前坤,黄旭钊,张洪瑞,周道卿,杨雪,谭林中国国土资源航空物探遥感中心,北京,100083摘要:采用传统重磁对应分析数据处理方法,计算了单体模型和三体模型条件下重磁异常的相关系数。
结果显示:重磁异常中心区域的相关系数绝对值在重磁异常重合时为1、否则小于1(能指示重磁异常是否相关),在远离异常源或无重磁异常地区的相关系数绝对值不论重磁异常是否重合都趋于1(没有实际意义)。
鉴于此,笔者提出了自适应重磁对应分析方法,并在晋冀北缘-辽西铁矿成矿带进行了2种方法的对比应用试验,结果表明:在滦南、司家营南部、马城等重磁异常完全重合的地区,2种数据处理方法的处理结果都表明为重磁正相关地区;在新集以东、小马庄西南部、石门东北部等重磁异常不完全重合或根本没有重磁局部异常的地区,传统重磁对应分析数据处理方法的处理结果也显示为正相关地区,自适应重磁对应分析数据处理方法的处理结果没有相关数据点或异常。
关键词:重力异常;航磁异常;对应分析;自适应;铁矿Adaptive Correlative Analysis Between Aeromagnetic and Gravity Anomaly Fan Zheng-guo, Liu Qian-kun, Huang Xu-zhao, Zhang Hong-rui, Zhou Dao-qing, Y ang Xue, Tan Lin China Aero Geophysical Survey and Remote Sensing Center for Land and Resoures, Beijing,100083Abstract: By using the previous correlation analysis of aeromagnetic and gravity anomaly,the characteristic of correlation coefficient has been studied over single model and three models. The correlation coefficient absolute value in gravity and magnetic anomaly regional center is equal to 1. when gravity and magnetic anomalies coincide, or less than 1. The correlation coefficient absolute value away from the gravity and magnetic anomaly is always close to 1. It not only makes no sense but also gives an illusion away from the fidld. Therefore the adaptive correlation analysis is put forward. Two methods were applied to from northern margin of Shanxi and Hebei to Western Liaoning metallogenic belt. The results demonstrate that gravity and magnetic anomalies coincide and are related in Luannan, Macheng and Southern Sijiaying region by using these two methods, but the results are still shown as related in East Xinji, Southern Xiaomazhuang, Northeastern Shimen which gravity and magnetic anomalies do not completely overlap or no abnormal area by using the previous method and these results don't appear by using the adaptive correlation analysis.Key word: gravity anomaly;aeromagnetic anomaly;correlation analysis;adaptive correlation analysis;iron deposit收稿日期:2012-01-01基金项目:中国地质大调查项目(1212010913037)作者简介:范正国(1962年-),男,硕士,教授级高级工程师,主要从事勘探地球物理(重磁放)方法技术研究与应用,E-mail:fzhglxj@。
1 引言沉积变质型铁矿通常具有重、磁异常同高的特点,因此,可以通过研究重磁异常的相关关系,达到提取与沉积变质型铁矿有关的异常信息。
研究重磁异常相关关系的首选方法为重磁对应分析。
Graland G D [1]首先采用重磁对应分析,即用泊松定理将重磁异常结合起来进行分析,确定单个地质体的泊松比σJ (J 为磁化强度,σ为剩余密度),以此确定地质体的性质。
Cordell L 等[2]在北极地区采用泊松定理确定单个地质体的物性参数以及剩磁的方向。
之后,Chandler V W 等[3]采用泊松定理分析了叠加场的重磁资料,从而将该方法推广到多源的重磁异常研究中。
刘心铸[4]率先从国外引入重磁对应分析方法,介绍了针对单个异常体、叠加异常体和组合异常体等理论模型的重磁对应分析及应用。
此后,周熙襄等[5]、董焕成[6]、管志宁等[7]~[8]、刘沈衡等[9]~[10]、殷秀华等[11]、王正科等[12]、窦喜英等[13]~[14]、曾昭发等[15]、刘彦华等[16]等学者开展了大量模型研究和实际应用。
纵观前人的研究工作,在理论研究方面,主要研究了相关系数|R |的大小与重磁异常间相关性强弱的关系、斜率a (=σG J ,其中G为万有引力常数)或泊松比的地质属性和截距b 的性质等;在模型研究方面,大多数学者仅研究了重磁完全同源时单体模型的重磁异常相关系数R 、斜率a 和截距b 的空间分布特征,仅有少数学者开展了组合模型研究,如周熙襄等[5]用5km × 5km 滑动窗口研究了正方体组合模型的重磁异常的相关系数、斜率和截距。
分析前人的研究工作及其成果,主要存在两方面不足:其一是,尽管已发现模型范围以外的相关系数会发生畸变,而实际应用时并未考虑其影响,仍然采用滑动窗口逐点计算相关系数;其二是,尽管已发现水平叠加模型存在干扰,但未研究解决办法,在实际应用中也未充分考虑。
本次研究中,开始时采用滑动窗口重磁对应分析方法对晋冀北缘-辽西地区的重磁数据进行对应分析,结果不理想,主要问题是:部分重磁异常吻合较好的地方,相关系数数值不大;而某些重磁异常吻合不好的地方,相关系数数值却较大。
针对发现的问题,开展了水平位置不完全重合的单体模型和三体模型的重磁对应分析试验,发现传统数据处理方法未考虑异常源的位置,在异常中心以外的地方也求出了相关系数数值,而该数值的大小不能指示重磁异常是否相关、没有实际意义,并给解释造成了干扰。
在模型研究基础上,提出了“自适应重磁对应分析数据处理法”,并研制了数据处理软件,其应用效果良好。
本文将介绍重磁对应分析的最新研究成果。
2 方法原理从位场理论可知,密度和磁性都均匀的地质体,引起同源重力异常和磁异常的关系可以用泊松方程来描述[13]:g ′J T ∆⋅=∆⊥ G σ (1)式中ΔT ⊥为磁ΔT 化极异常(单位为nT );∆g ′(=∂∆g /∂z )为重力异常Δg 的垂向一阶导数(单位为s -2);J 为地质体的磁化强度(单位为10-3A ·m -1);σ为地质体的剩余密度(单位为kg ·m -3);G 为万有引力常数(G =6.67×10-11N·m 3·kg -2)。
在实际环境中,地质体的磁化强度和密度往往不均匀,重磁场源的分布也很复杂、往往有多个异常源,而且还会有旁侧异常的干扰,不能简单地用一个比例常数来描述二者的分布关系。
这时,泊松定理不能成立。
不过若在研究范围内取一个较小窗口,在窗口内计算重磁异常的回归参数和相关系数,也可得到重磁异常之间的某种线性相关关系。
因此,在作回归分析时通常用下面的广义公式进行计算[13]:b g ′J b g ′a T +∆⋅=+∆⋅=∆⊥σG (2) 式中:a 为斜率;b 为ΔT ⊥的正常场校正值(通常称为截距)。
式(1)和(2)表明,在一定条件下,ΔT ⊥与∆g ′之间具有线性关系。
因此,在重磁对应分析中,采用磁化极异常和重力垂向一阶导数异常进行回归分析,并以相关系数R 来衡量磁异常和重力异常之间的相关关系,其定义为[14]: )(D )D(),(COV //g T g T R ∆⋅∆∆∆=⊥⊥ (3)式中:COV(ΔT ⊥,∆g ′)是ΔT ⊥和∆g ′的协方差;D (ΔT ⊥)和D (∆g ′)表示ΔT ⊥和∆g ′的方差。
另外,为了解决区域异常的干扰问题,也可以使用磁化极剩余异常ΔT ⊥S 和重力垂向一阶导数剩余异常∆g S ′或磁化极垂向一阶导数异常ΔT ⊥′和重力垂向二阶导数异常∆g ″来进行对应分析。
此时,对式(3)中的ΔT ⊥和∆g ′进行相应的替换即可。
3 模型试验由于自然界物性的不均匀性,地下物质的磁性和密度出现同步变化的情况较少,因此引起重磁异常的场源的大小和位置完全相同(即绝对同源)的情况较少;另外,由于化磁极的不彻底性、后期受构造改造等,也可能造成重磁异常的大小和位置不完全相同。
鉴于此,笔者分别进行了大小相同的单体和多体磁性、密度模型在位置完全重合和不完全重合条件下的试验。
3.1 单体模型试验3.1.1 重磁异常源位置完全重合时的试验假设地下存在一个磁性异常体和一个密度异常体,两者的大小相等、位置重合,试验结果表明:在模型上方任意位置的重磁异常相关系数|R |皆为1。
3.1.2 重磁异常源位置不完全重合时的试验假设地下存在一个磁性异常体和一个密度异常体,两者的大小相同、中心点的埋深都为5 km ,磁性体中心点在地表投影的坐标位置为(13 km ,13 km )、密度体中心点在地表投影的坐标位置为(10 km ,13 km )。
单体模型在地表的投影及其引起的重磁异常如图1所示。